Группа изобретений относится к области железнодорожной автоматики и телемеханики, в частности к системе автоматизированного управления движением поездов, предназначенной для интервального регулирования и обеспечения безопасности преимущественно поездной работы на железнодорожных линиях, включающих раздельные пункты (станции и др.) и одно- и многопутные перегоны с одно- и двусторонней организацией движения.
Известен способ интервального регулирования движения поездов на перегоне с автоблокировкой и устройство для его осуществления. Способ заключается в передаче на локомотив полномочий движения при исправной работе автоблокировки с рельсовыми цепями посредством сигнала АЛС. На посту электрической централизации информацию о местоположении поездов на перегоне получают от централизованной автоблокировки. Бортом локомотива принимают и контролируют на достоверность сигнал АЛС, формируют и передают на посты электрической централизации станций по дополнительному радиоканалу цифровой связи телеграмму с текущей координатой местонахождения локомотива и признаком целостности состава поезда. При обнаружении недостоверности сигнала АЛС в результате ложно занятого состояния рельсовых цепей дежурным по станции передаются по радиоканалу на борт локомотива соответствующие поездной обстановке полномочия движения. В устройстве для осуществления способа к каждому посту электрической централизации подключен приемопередатчик радиоканала связи. Приемопередатчики соединены между собой проводной линией связи. На каждом локомотиве в комплексное устройство безопасности введен блок контроля достоверности сигнала АЛС. Локомотивные приемопередатчики через специальный цифровой радиоканал соединены с приемопередатчиками постов электрической централизации (патент RU 2491198, МПК B61L 3/12, B61L 25/00, 27.08.2013).
Недостатками известного технического решения являются ограниченная область применения, сложность и использование источника недостаточно надежных и достоверных данных. Так, область применения ограничена участком перегона, на который допущены локомотивы, оборудованные прибором безопасности с приемником спутниковой навигации, с дополнительным радиоканалом цифровой связи передачи данных, и поезда, оборудованные устройством контроля целостности состава. Способ контроля достоверности сигнала АЛС на борту локомотива не достаточно надежен для оценки причин неисправности путевых устройств, не способствует улучшению качества формирования и неискаженного приема сигнала АЛС, предлагает парирование следствия, а не обнаружение причины возможного отказа путевых устройств. Устройство не обеспечивает контроль и диагностику формирования сигнала АЛС и состояния шунта на электромеханическом интерфейсе с подвижным составом.
Известны способ интервального регулирования движения поездов и устройство для его осуществления. Способ заключается в том, что оборудованный соответствующим образом поезд проводят с малой скоростью по участку с неисправными путевыми устройствами и при успешном его прохождении разрешают последующим поездам движение с увеличенной скоростью. При этом сопоставляют координаты расположения поездов на перегоне с информацией о занятости перегонных рельсовых цепей и о наличии светофоров с запрещающим сигнальным показанием. В случае обнаружения участков с ложной блокировкой аппаратуры осуществляют снятие блокировки. Устройство автоблокировки с рельсовыми цепями, реализующее способ, содержит модуль управления с подключенными к нему программными модулями обнаружения следующих нарушений в работе рельсовых цепей: потери шунтовой чувствительности; последовательности занятия и/или освобождения; обнаружения логической «ложной занятости» или «ложной свободности»; обнаружения сближения поездов на расстояние менее длины рельсовой цепи. Устройство формирует сигналы АЛС и передает их на локомотив по рельсовым цепям, дублируя их через модуль радиоканала. Модуль управления при обнаружении нарушений в работе рельсовых цепей логически определяет постоянные, обусловленные отказом, или временные, обусловленные помехами, нарушения и информирует об этом АРМ ДСП, который автоматически или во взаимодействии с диспетчером формирует команды разблокирования аппаратуры ложно занятых путевых участков при обнаружении их блокирования под воздействием случайных помех (патент RU 2491199, МПК B61L 23/00, B61L 27/00, 27.08.2013).
Недостатками известного технического решения являются ограниченная область применения, сложность, использование источника недостаточно надежных и достоверных данных, несет угрозу безопасности. Так, область применения ограничена участком перегона и локомотивом с оборудованием сети радиосвязи передачи данных, и поездом, оборудованным устройством контроля целости состава. При обнаружении неисправности путевого устройства применяют сложные и недостаточно надежные алгоритмы идентификации неисправности и поиска путей ее обхода, т.е. парирования следствия, а не устранения причины. Устройство для обнаружения указанных нарушений использует сигнал контроля состояния рельсовой цепи, которая не является надежным источником с необходимым уровнем достоверности информации. Устройство не обеспечивает контроль и диагностику формирования сигнала АЛС и состояния шунта на электромеханическом интерфейсе с подвижным составом. Способность АРМ ДСП - устройства не связанного с безопасностью, автоматически формировать команды разблокирования ложно занятых путевых участков создает угрозу безопасности движения поездов.
Известен способ интервального регулирования движения поездов, при котором для обнаружения поезда, контроля его местоположения используют тональные рельсовые цепи (ТРЦ) с сигналом КРЛ в виде амплитудно-модулированного сигнала с несущей тональной частотой и частотой амплитудной манипуляции 8 или 12 Гц. Известное техническое решение обеспечивает защиту путевых приемников ТРЦ от воздействия гармонических и импульсных помех тягового тока и токов централизованного электроснабжения вагонов пассажирских поездов и от взаимовлияния смежных и соседних ТРЦ и исключения ложного срабатывания от сигналов рельсовых цепей соседних путей (B.C. Дмитриев, В.А. Минин. Системы автоблокировки с рельсовыми цепями тональной частоты. М.: Транспорт, 1992. с. 8, 9, 11).
Недостатком известного способа является то, что амплитудная манипуляция сигнала КРЛ не обеспечивает достаточную защиту приемных устройств от помех и взаимовлияний ТРЦ и имеет проблемы метрологической оценки качества формируемого амплитудно-манипулированного сигнала на соответствие нормали ТРЦ.
Известен способ интервального регулирования движения поездов, при котором для формирования сигнала АЛС в рельсовой цепи (РЦ) подключают передатчик сигнала АЛС к рельсовой цепи в момент обнаружения шунтирования этой РЦ наступающим локомотивом поезда. Подключение передатчика сигнала АЛС с уровнем напряжения, установленным в соответствии с нормалью данной РЦ, производится к паре питающих или релейных жил кабеля рельсовой цепи. По мере вступления локомотива на следующую РЦ к ней подключают передатчик сигнала АЛС и одновременно прекращают кодирование предыдущей РЦ. Таким образом, начало формирования сигнала АЛС определяется вступлением локомотива на РЦ, а окончание - занятием следующей по ходу движения РЦ (Федоров Н.Е. «Современные системы автоблокировки с тональными рельсовыми цепями», Самара, СамГАПС, 2004, с. 84).
Известное техническое решение имеет недостаточный уровень надежности передачи на локомотив кодовых сигналов АЛС. Момент окончания кодирования РЦ не согласован с моментом завершения формирования кодовой посылки сигнала АЛС, что является источником потока систематических ошибок приема кода бортовой аппаратурой локомотива, вызванной образованием искаженных и неполных кодовых посылок при пересечении границы между двумя смежными рельсовыми цепями. Это может происходить как вследствие прерывания приема последней кодовой посылки из предыдущей рельсовой цепи, так и вследствие начала приема первой кодовой посылки из последующей рельсовой цепи. Кодовые посылки сигнала АЛС формируются в каждой рельсовой цепи независимо и несогласованно с движением локомотива, что повышает вероятность искажения кодовой посылки, сбоя кода на приеме и, как результат, выдачи ложной информации о свободности путевых участков и показаний локомотивного светофора. Ситуация усугубляется на коротких рельсовых цепях защитных участков и с повышением скорости движения.
Известен способ проверки цепи передачи сигнала АЛС при техническом обслуживании устройства автоблокировки путем измерений непосредственно со станции, где размещается аппаратура. Исправность всего тракта передачи проверяют по прохождению сигналов АЛС. Для этого при отсутствии шунта ТРЦ с передающего конца в кабельную линию подают нормативное напряжение и измеряют ток в кабельной линии приемного конца. Соответствие величины тока установленному диапазону значений является критерием обеспечения нормативного тока сигнала АЛС в рельсах ТРЦ (B.C. Дмитриев, В.А. Минин «Системы автоблокировки с рельсовыми цепями тональной частоты», Москва, Транспорт, 1992, с. 50, 52).
Известное техническое решение обеспечивает недостаточный уровень надежности аппаратуры АЛС, т.к. предполагает плановый метод технического обслуживания с использованием персоналом специальных измерительных приборов, в результате которого увеличивается время обнаружения и восстановления отказа и уменьшается эксплуатационная готовность аппаратуры АЛС.
Наиболее близким аналогом к заявляемому изобретению в части устройства по совокупности существенных признаков и функциональным возможностям является система интервального регулирования движения поездов, которая выбрана в качестве прототипа. Известная система состоит, по крайней мере, из двух комплексов оборудования перегонной автоблокировки, предназначенных для одного пути и установленных на каждой из двух соседних станций, ограничивающих перегон. Каждый комплекс содержит модуль управления, реализующий алгоритм работы автоблокировки, который соединяет с одной стороны двухшинным системным интерфейсом и выделенным информационно-диагностическим интерфейсом генератор комплексного сигнала КРЛ и АЛС, модуль путевого приемника сигнала КРЛ, модуль взаимосвязи с электрической централизацией, модуль взаимосвязи с соответствующим комплексом автоблокировки соседней станцией, модули взаимосвязи со светофорами, переездами и другими устройствами сигнализации состояния объектов инфраструктуры. Также модуль управления автоблокировки соединяет с другой стороны двухшинным межсистемным интерфейсом и/или внешним информационным интерфейсом модули управления автоблокировкой других путей перегона, автоматизированные рабочие места дежурного по станции (АРМ ДСП) и электромеханика (АРМ ШН), модуль радиоканала и реального времени и модуль диспетчерской централизации и/или диспетчерского контроля. Модули автоблокировки, связанные с безопасностью, выполнены в виде двух независимых каналов обработки, связанных безопасной схемой сравнения, которая переводит модуль в защитное состояние при отказе или сбое в работе одного из каналов, где первые каналы модулей взаимодействуют по первой шине, а вторые каналы - по второй шине двухшинного системного интерфейса (патент RU 2521066, МПК B61L 23/16, B61L 27/04, 27.06.2014).
Недостатком известной системы является то, что область ее применения ограничена путями перегона, имеет недостаточную надежность и достоверность обнаружения и контроля местоположения поезда для обеспечения безопасности интервального регулирования движения поездов, недостаточную надежность передачи полномочий движения от генератора сигнала АЛС на борт локомотива через рельсовую цепь, недостаточную глубину диагностики напольных устройств и элементов рельсовой цепи и нехватку оперативной диагностической информации о сбоях, отказах и предотказных состояниях в работе элементов напольных устройств в центре технической диагностики и мониторинга систем ЖАТ.
Наиболее близким аналогом к заявляемому изобретению в части способа по совокупности существенных признаков является известный способ формирования кодового сигнала АЛС в тональной рельсовой цепи, при котором блок включения кодирования формирует циклы сигнала АЛСН числового кода, начинающиеся с паузы длительностью 0,57-1,3 с (патент RU 104136, МПК B61L 23/16, 10.05.2011).
Известный способ повышает надежность приема сигналов АЛСН при проследовании локомотивом границ смежных рельсовых цепей, т.к. уменьшает вероятность появления искаженных кодовых посылок вследствие наложения приема первой кодовой посылки с неполной кодовой посылкой из предыдущей ТРЦ.
Известное техническое решение, однако, недостаточно повышает надежность приема сигналов АЛСН, т.к. не исключает образование искаженных и неполных кодовых посылок из предыдущей рельсовой цепи. Также это техническое решение ориентировано на специфическую временную последовательность цикла формирования числового кода сигнала АЛСН и имеет ограниченную только формированием сигнала АЛСН область применения.
Задача, на решение которой направлено изобретение, заключается в повышении надежности работы напольных устройств и безопасности движения поездов.
Технический результат заключается в том, что заявляемые система и способ обеспечивают:
- повышение надежности передачи полномочий движения на борт локомотива поезда путем формирования сигнала АЛС в рельсовой цепи, как на путях перегона, так и путях станции от двух синхронизированных генераторов сигнала АЛС;
- повышение надежности и достоверности обнаружения и контроля местоположения поезда в случае использования системой тональной рельсовой цепи за счет применения помехозащищенной угловой манипуляции (частотной или фазовой) сигнала КРЛ;
- повышение надежности контроля качества шунта подвижного состава, в частности при допуске к обращению на линию подвижных единиц с низкой осевой нагрузкой;
- углубление диагностики напольных элементов рельсовой цепи и генераторов сигнала АЛС и формирования и передачи оперативной диагностической информации о сбоях, отказах и предотказных состояниях их работы в архив и в центр технической диагностики и мониторинга систем ЖАТ для организации технического обслуживания напольных устройств по их состоянию.
Технический результат предлагаемого изобретения в части системы достигается тем, что в состав напольных устройств ЭЦ и АБ согласно изобретению добавлен напольный приемник сигналов АЛС, который позволяет осуществлять контроль и диагностику параметров качества сигнала АЛС, формируемого в рельсовой цепи соответствующим генератором, как при наличии поездов, так и при их отсутствии. Также добавлены модуль тактовой синхронизации, тактовый генератор и порты синхронизации генераторов сигнала АЛС, которые позволяют синхронизировать работу распределенных вдоль железнодорожной линии генераторов АЛС.
Технический результат предлагаемого изобретения в части способа достигается тем, что согласно изобретению с целью повышения надежности передачи полномочий движения на борт локомотива сигнал АЛС в рельсовой цепи под приемными катушками головы поезда формируют в результате наложения (суперпозиции) сигналов двух генераторов АЛС, подключенных к двум последовательным рельсовым цепям, расположенным впереди наступающего поезда, а с целью повышения надежности контроля состояния рельсовой линии и достоверности контроля местоположения поезда в случае использования системой тональной рельсовой цепи несущую частоту сигнала КРЛ для повышения помехозащищенности кодируют методом угловой (частотной или фазовой) манипуляции. Также с целью повышения надежности контролируют параметры сигнала АЛС в рельсовой цепи до вступления головы поезда и с целью контроля качества электромеханического интерфейса взаимодействия типа «колесо-рельс» между напольным оборудованием и подвижным составом в регламентированных условиях эксплуатации в рельсовой цепи за хвостом уходящего поезда (качества шунта). Также с целью углубления диагностики организуют непрерывное циклическое тестирование генератора сигнала АЛС и элементов рельсовой цепи передачи сигнала АЛС в процессе эксплуатации системы при отсутствии поезда, формируют и передают их диагностику в архив и в центр системы технической диагностики и мониторинга устройств ЖАТ для оперативного планирования технического обслуживания напольных устройств методом обслуживания «по состоянию».
Заявляемое изобретение может быть реализовано в современных системах управления движением поездов и, в частности, реализовано в системе автоблокировки с тональными рельсовыми цепями и централизованным размещением аппаратуры типа АБТЦ-И.
Сущность группы изобретений и ее преимущества будут более понятны из нижеследующего описания, представленного исключительно в качестве примера со ссылками на прилагаемые чертежи.
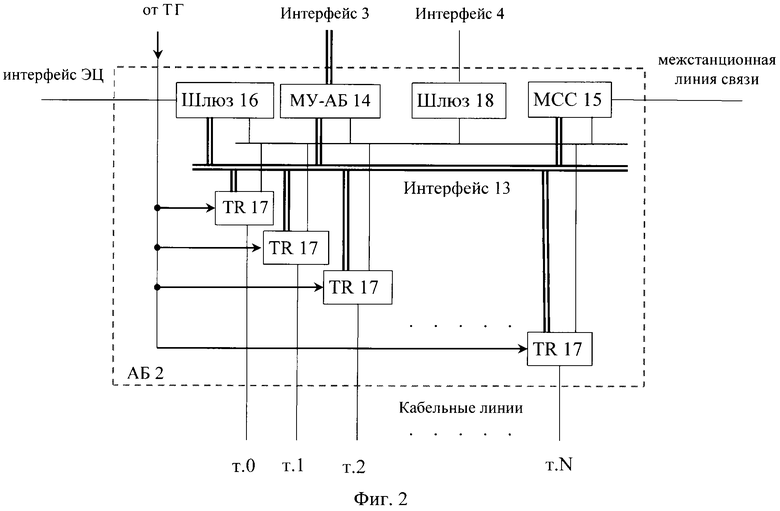
На фиг. 1 представлена структура системы автоматизированного управления движением поездов железнодорожной линии, а на фиг. 2 - структура устройства автоблокировки полуперегона. Система состоит из устройства электрической централизации 1 (ЭЦ) железнодорожной станции и устройства перегонной автоблокировки 2 (АБ), которые используют рельсовые цепи для обнаружения поезда, контроля его местоположения и передачи полномочий движения на борт локомотива поезда, связанных межсистемным первым двухшинным интерфейсом 3 и межсистемным диагностическим интерфейсом 4 с автоматизированными рабочими местами дежурного по станции 5 и электромеханика 6 (АРМ ДСП и АРМ ШН соответственно), модулем радио канала и реального времени 7 (МРК и PB), системным модулем технической диагностики и мониторинга 8 (МТДМ), модулем тактовой синхронизации 9 (МТС) с единым тактовым генератором (ТГ) 10 и через шлюз связи 11 и систему передачи данных 12 (СПД) связанных в технологическую сеть, как с другими аналогичными системами, так и с диспетчерской централизацией и другими системами управления, контроля и диагностики верхнего уровня (не показаны), где устройство электрической централизации 1 связано с устройствами перегонной АБ 2, со светофорами, стрелками и другими станционными объектами управления и контроля, где устройство перегонной АБ, связанное через кабельные линии с проходными светофорами, с рельсовыми линиями (РЛ) перегонов, с переездной и другими устройствами сигнализации состояния объектов инфраструктуры перегона, состоит по крайней мере из двух комплексов оборудования автоблокировки 2, каждый из которых (см. фиг. 2) связан с другим комплексом межстанционной линией связи, одним портом с межсистемным первым двухшинным интерфейсом 3, другим портом со вторым двухшинным интерфейсом 13, с которым связаны также модуль управления автоблокировки 14 (МУ-АБ), модуль межстанционной связи 15, межсистемный шлюз сопряжения 16 с устройством электрической централизации 1, модули 17 трансивера (TR) и которые связаны через диагностический порт, внутрисистемный диагностический интерфейс и соответствующий шлюз 18 с межсистемным диагностическим интерфейсом 4. Модуль 17 трансивера включает в себя приемопередатчики сигнала КРЛ и приемопередатчики сигнала АЛС, связанные через согласующее устройство (фильтры и другие элементы), двухпроводную кабельную линию и путевой трансформаторный модуль (не показаны) с точками подключения рельсовой линии. Модуль трансивера TR может быть реализован на базе сигнальных процессоров цифровой обработки сигналов. Трансиверы для АБ с централизованным размещением оборудования располагают на станциях, ограничивающих перегон. Формирование сигналов КРЛ и АЛС с необходимым усилением и согласованием допустимо генератором комплексного сигнала КРЛ и АЛС или независимыми генераторами. Для случая применения ТРЦ (без изолирующих стыков) генератор сигнала КРЛ через точку подключения питающего конца может формировать сигнал одновременно в двух смежных ТРЦ, а приемник сигнала КРЛ через точку подключения релейного конца может принимать сигналы одновременно из двух смежных ТРЦ. Генератор и напольный приемник сигнала АЛС применяют, как правило, парно, используя такие точки подключения к рельсовой линии, которые позволяют реализовать функции контроля и диагностики в условиях эксплуатации системы.
Для достижения технического результата существенными элементами являются:
- модуль 7 радио канала и реального времени;
- модуль 9 службы тактовой синхронизации с единым тактовым генератором 10;
- модуль 14 управления МУ-АБ;
- модуль 17 трансивера;
- порт синхронизации генератора сигнала АЛС трансиверов 17;
- интерфейс между портом синхронизации генераторов сигналов АЛС трансиверов устройств ЭЦ и АБ и единым тактовым генератором ТГ 10;
- порты диагностики модулей системы;
- модуль 8 технической диагностики и мониторинга (МТДМ);
- интерфейс 4 межсистемный диагностический.
Фиг. 3 иллюстрирует способ формирования когерентного сигнала АЛС на примере автоблокировки с ТРЦ. Здесь схематически показаны направление движения со скоростью V головы подвижного состава (RS) с приемными катушками ПК сигнала АЛС бортовой аппаратуры локомотива и с шунтирующим сопротивлением колесной пары Rш (шунт), двухниточный план неразрывного участка рельсовой линии пути перегона (без изолирующих стыков), концы тональных рельсовых цепей (ТРЦ) с точками подключения напольной аппаратуры (т.0, т.1, т.2 и т.3), трансиверы TR0, TR1, TR2 и TR3, продольные эпюры сигнальных токов, формируемых генераторами сигнала АЛС трансиверов TR1 и TR2 в смежных ТРЦ для следующего статического состояния: сигнальные токи Ι1 и I2 в сторону головы наступающего подвижного состава, I10, I20 в противоположном направлении; сигнальный ток Ι0 в точке подключения т.0 приемника сигнала АЛС, содержащий фрагменты сигнала АЛС из-под хвоста поезда; генераторы сигнала АЛС трансиверов TR0 и TR3 выключены; напольные приемники трансиверов TR0 и TR1 включены. Здесь показано, что эффективное значение сигнального тока I1 генератора сигнала АЛС трансивера TR1 снижается от т.1 в направлении головы RS за счет шунтирующего действия распределенного сопротивления балласта путевого полотна и уменьшается до нуля за шунтом Rш: Ι0=0. Эффективное значение сигнального тока I2 генератора сигнала АЛС трансивера TR2 снижается от т.2 до т.1 в направлении головы RS за счет противотока I10 и шунтирующего действия распределенного сопротивления балласта путевого полотна и скачкообразно уменьшается в т.1 на величину ΔI2 за счет шунтирующего действия внутреннего сопротивления генератора трансивера TR1. За т.1 в ТРЦ1 в направлении головы RS происходит наложение остатка сигнального тока I2 на сигнальный ток Ι1. Таким образом, кодовый сигнал АЛС, проходящий под приемными катушками бортовой аппаратуры RS и замыкаемый шунтом Rш, представляет собой интерференцию сигнальных токов АЛС, формируемых генераторами сигнала АЛС трансиверов TR1 и TR2. При применении генераторов сигнала АЛС трансиверов TR1 и TR2, формирующих когерентные сигналы АЛС, согласованные и синхронизированные по времени, суперпозиция сигналов в шунте Rш представляет собой конструктивную интерференцию токов I1 и I2, результатом которой является увеличение амплитуды и мощности сигнала АЛС. По мере приближения RS к т.1 усиливается шунтирующее действие Rш, что приводит к увеличению сигнальных токов I1 и I2, изменению наклона эпюр токов I1 и I2 и уменьшению скачка ΔI2, величины которых определяются алгоритмом расчета методом суперпозиции токов электрической цепи конкретной ТРЦ. В т.1 сигнальный ток I1 полностью шунтируется колесной парой RS, но на приемные катушки бортовой аппаратуры RS продолжает воздействовать синфазный с I1 сигнальный ток I2, что позволяет осуществить прием предыдущей кодовой посылки сигнала АЛС до конца ее формирования в линии практически без искажения.
Описанный способ применим также к смежным рельсовым цепям, разделенным изолирующим стыком ИС (например, в маршруте приема на станцию), без наложения сигнальных токов генераторов сигналов АЛС, но с сохранением синхронизма при формировании сигналов АЛС генераторами, разделенными изолирующим стыком (пренебрегаем расстоянием между изолирующим стыком и точкой подключения напольного оборудования к РЛ). Технический эффект заключается в снижении вероятности искажений сигнала АЛС в точках подключения напольного оборудования и уменьшении числа системных сбоев приема кодовых посылок бортовым приемником сигнала АЛС, что позволяет повысить надежность передачи полномочий движения на борт локомотива и повысить безопасность движения поездов, особенно на участках без светофорной сигнализации, где систему АЛС применяют в качестве самостоятельного средства сигнализации и связи.
Межсистемный двухшинный интерфейс 3 (фиг. 1) позволяет АРМ ДСП и АРМ ШН взаимодействовать с устройствами АБ, с устройствами ЭЦ и через шлюзы и технологическую систему передачи данных СПД с системами управления верхнего уровня (ДЦ, ДК, СТДМ, АСУП и др.) для организации управления движением поездов, диагностики, технического обслуживания и ремонта устройств систем ЖАТ железнодорожной линии.
Внутрисистемный интерфейс 13 (фиг. 2) обеспечивает разделение потоков, переносящих ответственные сообщения контроля и управления движением поездов и информационно-диагностических сообщения. Сетевая архитектура внутрисистемного интерфейса определяется типом передаваемых сообщений. Для ответственных данных применяют двух- или многошинную безопасную архитектуру. Для передачи потока информационно-диагностических сообщений применяют высокопроизводительную информационную сеть. Разделение потоков снижает трафик внутрисистемного и межсистемного двухшинных интерфейсов, с одной стороны, и позволяет расширить и углубить диагностику устройств системы путем повышения трафика диагностической информации.
В соответствии с проектом питающие и приемные концы тональных рельсовых цепей устройств ЭЦ и АБ образуют подключением генераторов и приемников сигнала КРЛ комплекса оборудования автоблокировки одной станции к т.1 - т.Ν рельсовой линии своей части перегона (полуперегона) и подключением генераторов и приемников сигнала КРЛ комплекса оборудования автоблокировки другой станции к точкам подключения остальной части перегона, размещаемых на станциях, ограничивающих перегон.
Модуль службы тактовой синхронизации МТС 9, используя временные метки точного времени модуля МРК и PB 7 (на базе приемника сигналов спутниковой навигации) или сигналы системы тактовой синхронизации цифровых систем связи, обеспечивает систему метками точного времени для архивирования данных диагностики, для сбора, формирования и передачи диагностики в центр системы технической диагностики и мониторинга устройств ЖАТ. Модули МТС распределенных вдоль железнодорожной линии комплексов систем координируют работу, периодически взаимодействуя через сеть СПД 12. Модуль МТС коррелирует работу тактовых генераторов ТГ 10 двух комплексов АБ, расположенных на ограничивающих перегон станциях. Использование синхросигнала тактового генератора ТГ позволяет двум генераторам сигнала АЛС синхронизировать между собой момент начала формирования сигнала АЛС. Использование синхросигналов ΤГ устройством ЭЦ 1 станции позволяет организовать сквозное «бесшовное» формирования сигнала АЛС не только на путях перегона и станции, но и на участках пути, где необходимо использовать изолированные стыки ИС.
Устройства АБ независимо управляют работой напольного оборудования соответствующих рельсовых линий РЛ1 и РЛ2 путей полуперегона при взаимодействии с сопряженной через модуль межстанционной связи МСС 15 станцией. Устройства АБ через межсистемный двухшинный интерфейс 3 взаимодействуют между собой при обнаружении событий, связанных с безопасностью движения, например, с риском нарушения габарита на соседних путях перегона аппаратурой сигнализации переезда и других устройств сигнализации (обвальной, мостовой, туннельной, устройств контроля схода подвижного состава и др.).
Система и способ работают следующим образом.
После конфигурирования модулей системы в соответствии с проектом технического оснащения станции и перегона железнодорожной линии и диагностики работоспособности устройств ЭЦ и АБ и их составляющих элементов определяют местоположение подвижного состава на путях перегона и станции.
Система в соответствии с алгоритмом интервального регулирования начинает передачу полномочий движения на борт локомотива поезда посредством формирования сигналов АЛС в рельсовой цепи наступающего RS. Для этого генераторы сигнала АЛС устройств ЭЦ и АБ, синхронизированные через порт синхронизации единым ТГ 10, подключают к двум смежным ТРЦ1 и ТРЦ2 (фиг. 3), расположенным впереди головы наступающего RS, которые формируют в рельсовой цепи под приемными катушками бортовой аппаратуры локомотива когерентную сумму сигнальных токов Ι1 и I2. Напольный приемник сигнала АЛС трансивера TR1 принимает и наблюдает изменение скачка сигнального тока ΔI2 генератора сигнала АЛС трансивера TR2 в точке подключения т.1 вплоть до момента его шунтирования RШ наступающего RS, что позволяет диагностировать работу генератора сигнала АЛС трансивера TR2 непосредственно в процессе движения. При обнаружении занятия ТРЦ2 модуль МУ-АБ производит отключение генератора сигнального тока Ι1 трансивера TR1. При этом на приемные катушки бортовой аппаратуры локомотива воздействует сигнальный ток I2. По окончании формирования текущей кодовой посылки генератором сигнала АЛС трансивера TR2 модуль МУ-АБ задает код для формирования следующей кодовой посылки сигнала АЛС и включает генераторы сигналов АЛС в смежных ТРЦ2 и ТРЦ3 с требуемыми конфигурационными параметрами в соответствии с нормалями. При этом задержка переключения кода сигналов АЛС в случае изменения их кода от момента пересечения локомотивом очередной точки подключения не превышает максимальной длительности формирования кодовой посылки сигнала АЛСН (не более 1,86 с) и не превышает задержки при традиционном способе формирования сигнала АЛС. Задаваемый код для формирования кодовой посылки сигнала АЛС определяется модулем МУ-АБ 14 исходя из принадлежности ТРЦ к конкретному блок-участку в соответствии с проектом осигнализования перегона и станции и с текущей поездной обстановкой.
Этим достигается снижение вероятности искажений кодовой посылки сигнала АЛС при пересечении границы между смежными рельсовыми цепями. Однако по мере движения RS уровень тока в РЛ под приемными катушками локомотива может изменяться в 10-20 раз в зависимости от длины рельсовой линии, поэтому для исключения искажения принимаемых сигналов АЛС применяют автоматическую регулировку усиления локомотивного приемника сигнала АЛС (Системы железнодорожной автоматики и телемеханики: Учеб. для вузов/Под ред. Ю.А. Кравцова. М.: Транспорт, 1996. с. 149, 151). Когда локомотив находится на выходном питающем конце рельсовой цепи чувствительность локомотивного приемника сигнала АЛС минимальна, т.к. сигнальный ток в рельсовой цепи максимален. С наступлением локомотива на следующий входной релейный конец рельсовой цепи уровень принимаемого сигнала АЛС скачкообразно снижается. Время восстановления чувствительности усилителя локомотивного приемника при переходе с максимального на нормативный уровень сигнала характеризует эффективность действия автоматической регулировки усиления и создает дополнительный источник искажения кодовой посылки сигнала АЛС.
Повышение надежности и снижение вероятности искажения приема кодовой посылки сигнала АЛС на борту локомотива достигается способом адаптивного регулирования значения сигнального тока I1 генератора сигнала АЛС трансивера TR1. По мере приближения RS к т.1 приемник сигнала АЛС трансивера TR1 наблюдает уменьшение величины ΔI2 и ее обнуление в момент шунтирования т.1. При этом МУ-АБ 14 отслеживает это уменьшение и регулирует коэффициент усиления генератора сигнала АЛС трансивера TR1 так, чтобы уменьшить величину сигнального тока I1 и тем самым уменьшить величину скачка суммы токов I1 и I2 в момент шунтирования т.1 локомотивом. Технический эффект реализации адаптивного регулирования значения сигнального тока заключается в дальнейшем снижении вероятности искажения кодовых посылок на приеме, числа сбоев в работе системы АЛС и, в конечном счете, в повышении надежности.
Модуль МУ-АБ 14 управляет подключением напольного приемника сигнала АЛС к ближайшей точке подключения за хвостом уходящего поезда. По мере движения RS передача полномочий движения на борт локомотива посредством формирования сигналов АЛС в рельсовой цепи наступающего RS осуществляется в том случае, если часть рельсовой цепи между генератором сигнала АЛС и локомотивом свободна от подвижного состава. Тогда сигнальный ток замыкается преимущественно через колесные пары этого поезда и передача сигнала АЛС на следующий поезд не происходит. Этим достигается передача полномочий движения одному поезду, вне зависимости от количества поездов на рельсовой цепи (A.M. Брылеев и др. Автоматическая локомотивная сигнализация и авторегулировка. М.: Транспорт, 1981. с. 18). Однако при определенных обстоятельствах может произойти прохождение сигнала АЛС под колесными парами первого поезда и его ошибочный прием последующим, что создает угрозу безопасности движения поездов. С целью повышения безопасности модуль МУ-АБ, наряду с контролем качества шунта сигналом КРЛ, осуществляет дополнительный контроль качества электромеханического интерфейса взаимодействия типа «колесо-рельс» между напольным оборудованием системы и подвижным составом в регламентированных условиях эксплуатации путем оценки параметров фрагментов сигнала АЛС (сигнальный ток Ι0 на фиг. 3) «из-под колес» уходящего поезда, принимаемых напольным приемником сигнала АЛС, подключенным к рельсовой цепи, шунтированной колесными парами уходящего RS за хвостом поезда. Модуль МУ-АБ использует эту оценку в задаче интервального регулирования движения поездов, в частности, для увеличения длины защитного участка за хвостом подвижного состава с низким качеством шунта. При освобождении рельсовой цепи уходящим поездом для непрерывного контроля качества шунта включают напольный приемник сигнала АЛС, соединенный с точкой подключения следующей рельсовой цепи. Управление напольными приемниками сигнала АЛС в процессе движения поезда осуществляется так, чтобы контроль и диагностика параметров сигнала АЛС осуществлялись как со стороны головы приближающегося поезда, так и со стороны хвоста уходящего поезда.
Модуль МУ-АБ 14 управляет параметрами конфигурации приемных и генерирующих устройств аппаратуры трансивера TR, управляет переключениями генераторов и напольных приемников сигнала АЛС, а по сигналам КРЛ постоянно контролирует состояние как отдельной рельсовой цепи, так и пути перегона в целом и диагностирует качество работы аппаратуры. С целью повышения надежности контроля состояния рельсовой линии и достоверности контроля местоположения поезда в случае предусмотренного проектом оборудования железнодорожной линии устройствами ТРЦ несущую частоту сигнала КРЛ кодируют методом угловой (частотной или фазовой) манипуляции для повышения помехозащищенности ТРЦ.
При отсутствии движения поездов в процессе эксплуатации системы модуль МУ-АБ 14 управляет подключением генератора сигнала АЛС и оценивает параметры качества сигнала, принятого соответствующим напольным приемником сигнала АЛС с целью организации постоянного циклического тестирования генератора сигнала АЛС и элементов рельсовой цепи передачи сигнала АЛС для поддержания их готовности передачи полномочий на борт локомотива. Это позволяет углубить диагностику напольного оборудования, собрать и передать в архив и центр системы технической диагностики и мониторинга устройств ЖАТ нужный объем диагностической информации для оперативного планирования технического обслуживания напольных устройств по состоянию, сократить время восстановления работоспособности системы и повысить надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2521066C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2753990C1 |
| УСТРОЙСТВО МИКРОПРОЦЕССОРНОЙ АВТОБЛОКИРОВКИ | 2007 |
|
RU2354574C2 |
| Микропроцессорная система автоблокировки с децентрализованным размещением аппаратуры | 2022 |
|
RU2784240C1 |
| Устройство для регулирования движения поездов | 2023 |
|
RU2806466C1 |
| СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДА НА ПЕРЕГОНЕ | 2014 |
|
RU2548645C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ С АВТОБЛОКИРОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491198C1 |
| Способ контроля состояния рельсовой линии и система интервального регулирования движения поездов на перегоне | 2021 |
|
RU2766015C1 |
| Устройство передачи управляющих команд автоматической локомотивной сигнализации в рельсовые цепи централизованной системы автоблокировки | 2024 |
|
RU2834089C1 |
| СПОСОБ ФОРМИРОВАНИЯ И ПЕРЕДАЧИ НА ЛОКОМОТИВ СИГНАЛОВ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ В АВТОБЛОКИРОВКЕ С ТОНАЛЬНЫМИ РЕЛЬСОВЫМИ ЦЕПЯМИ И ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ ОБОРУДОВАНИЯ | 2014 |
|
RU2570120C1 |

Техническое решение относится к области железнодорожной автоматики и телемеханики на железнодорожном транспорте. Система содержит электрическую централизацию и автоблокировку, использующие рельсовые цепи для обнаружения поезда и контроля его местоположения и устройства АЛС для передачи полномочий движения на борт локомотива поезда. Дополнительно введены модуль тактовой синхронизации, тактовый генератор, порт синхронизации генераторов сигналов АЛС, напольный приемник сигналов АЛС в рельсовой цепи и сетевой модуль технической диагностики и мониторинга. Способ заключается в формировании в рельсовой цепи когерентного сигнала в результате наложения кодированных сигнальных токов, в своевременном управлении включением/выключением и сменой кодовых комбинаций напольных генераторов сигнала АЛС, в случае применения в системе тональной рельсовой цепи для контроля местоположения поезда в формировании сигнала контроля состояния рельсовой линии путем кодирования несущей тональной частоты сигнала КРЛ методом угловой (частотной или фазовой) манипуляции. Достигается повышение надежности и безопасности системы управления движением поездов. 2 н. и 2 з.п. ф-лы, 3 ил.
1. Система управления движением поездов, состоящая из устройства электрической централизации железнодорожной станции и устройства перегонной автоблокировки, которые используют рельсовые цепи для обнаружения поезда, контроля его местоположения и передачи полномочий движения на борт локомотива, связанных межсистемными первым двухшинным интерфейсом и диагностическим интерфейсом с автоматизированными рабочими местами дежурного по станции и электромеханика, модулем радио канала и реального времени, через шлюз связи и систему передачи данных связанных в сети как между собой, так и с диспетчерской централизацией и другими системами управления верхнего уровня, где устройство электрической централизации связано устройствами перегонной автоблокировки со светофорами, стрелками и другими станционными объектами управления и контроля, где устройство перегонной автоблокировки связано через кабельные линии со светофорами, с рельсовыми линиями перегонов, с переездной и другими устройствами сигнализации состояния объектов инфраструктуры, состоит по крайней мере из двух комплексов оборудования автоблокировки, каждый из которых связан с другим комплексом межстанционной линией связи и содержит связанные вторым двухшинным интерфейсом модуль управления сигналами автоблокировки, модуль межстанционной связи, межсистемный шлюз сопряжения с устройством электрической централизации, генераторы комплексного сигнала контроля состояния рельсовой линии (КРЛ) и автоматической локомотивной сигнализации (АЛС), напольный приемник сигнала КРЛ, связанные с рельсовыми линиями железнодорожного пути через соответствующие точки подключения, и все они через диагностический порт связаны внутрисистемным диагностическим интерфейсом, который через соответствующий шлюз связан с межсистемным диагностическим интерфейсом, отличающаяся тем, что дополнительно включает напольный приемник сигналов АЛС в рельсовой цепи, модуль тактовой синхронизации, тактовый генератор, порт синхронизации генераторов сигнала АЛС и сетевой модуль технической диагностики и мониторинга, где модуль тактовой синхронизации, связанный с первым двухшинным межсистемным интерфейсом и через соответствующий шлюз и систему передачи данных с сетью аналогичных удаленных модулей, выход которого подключен к входу тактового генератора синхросигнала, который одновременно подается на порт синхронизации генераторов сигнала АЛС трансиверов, входящих в состав устройств электрической централизации и путевой автоблокировки, где напольный приемник сигнала АЛС включен в состав трансивера устройств электрической централизации и путевой автоблокировки для автоматизации функций управления сигналами АЛС, контроля качества электромеханического интерфейса взаимодействия типа «колесо-рельс» между напольным оборудованием системы и подвижным составом, углубления диагностики напольных элементов рельсовой цепи и генераторов сигнала АЛС, формирования и передачи диагностической информации в архив, где модуль технической диагностики и мониторинга, связанный с диагностической шиной с одной стороны для сбора и с первым двухшинным межсистемным интерфейсом с другой стороны для передачи диагностической информации в центр системы технической диагностики и мониторинга устройств железнодорожной автоматики и телемеханики (ЖАТ) через соответствующий шлюз и систему передачи данных.
2. Способ интервального регулирования движения поездов, заключающийся в передаче полномочий движения на борт локомотива поезда и в контроле местоположения поездов на линии путем формирования в рельсовой цепи сигналов КРЛ и АЛС, отличающийся тем, что с целью повышения надежности передачи полномочий движения на борт локомотива через рельсовые цепи путей перегона и станции сигнал АЛС в рельсовой цепи под приемными катушками головы поезда формируют в результате наложения (суперпозиции) сигналов двух генераторов, подключенных к двум последовательным рельсовым цепям, расположенным впереди наступающего поезда, где генераторы формируют синхронизированные сигналы АЛС так, что в результате их наложения под приемными катушками головы поезда образуется суммарный положительно когерентный сигнал, причем при прохождении поездом точки подключения напольной аппаратуры к рельсовой линии и шунтирования цепи первого генератора производят его немедленное отключение, а момент включения следующего третьего генератора сигнала АЛС задерживают до завершения формирования вторым генератором текущей посылки с предыдущей кодовой комбинацией с целью исключения ее искажения и началом формирования вторым и третьим генераторами синхронизированных сигналов следующей посылки с заданными параметрами и требуемой логикой задачи интервального регулирования той же или другой кодовой комбинацией, а также с целью повышения надежности контроля состояния рельсовой линии и достоверности контроля местоположения поезда в случае использования тональной рельсовой цепи несущую частоту сигнала КРЛ для повышения помехозащищенности кодируют методом угловой (частотной или фазовой) манипуляции.
3. Способ по п. 2, отличающийся тем, что с целью повышения безопасности осуществляют контроль качества электромеханического интерфейса взаимодействия типа «колесо-рельс» между напольным оборудованием системы и подвижным составом в регламентированных условиях эксплуатации путем оценки параметров фрагментов сигнала АЛС «из-под колес» уходящего поезда (качества шунта), принимаемых напольным приемником сигнала АЛС, подключенным к рельсовой цепи, шунтированной колесными парами подвижного состава за хвостом поезда, и используют эту оценку в задаче интервального регулирования движения поездов, в частности, для увеличения длины защитного участка за хвостом подвижного состава с низким качеством шунта, где при освобождении рельсовой цепи уходящим поездом для непрерывного контроля качества шунта включают напольный приемник сигнала АЛС, соединенный с точкой подключения следующей рельсовой цепи.
4. Способ по п. 2, отличающийся тем, что с целью углубления диагностики организуют непрерывное циклическое тестирование генератора сигнала АЛС и элементов рельсовой цепи передачи сигнала АЛС в процессе эксплуатации системы при отсутствии поезда путем тестового включения генератора и оценки параметров качества сигнала АЛС, принятого соответствующим напольным приемником, где с целью оперативного планирования технического обслуживания по состоянию напольных устройств формируют и передают диагностическую информацию о сбоях, отказах и предотказных состояниях их работы в архив и в центр системы технической диагностики и мониторинга устройств ЖАТ.
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2521066C1 |
| Способ выработки сортовых изделий из накладного стекла | 1955 |
|
SU104136A1 |
| УСТРОЙСТВО ПЕРЕДАЧИ УПРАВЛЯЮЩИХ КОМАНД АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ В РЕЛЬСОВЫЕ ЦЕПИ ЦЕНТРАЛИЗОВАННОЙ СИСТЕМЫ АВТОБЛОКИРОВКИ | 2009 |
|
RU2417913C1 |
| KR 101165355 B1, 18.07.2012 | |||
| KR 20100048659 A, 11.05.2010.. | |||

