Изобретение относится к области спортивной медицины и может быть использовано для контроля и анализа качества выполнения спортсменами различных движений и управления тренировочным процессом.
Оценка эффективности спортивных тренировок (с возможным выявлением усталостных явлений в мышцах), а также контроль состояния опорно-двигательного аппарата (суставов, нервно-мышечных тканей) в процессе реабилитационных процедур, проводимых после каких-либо повреждений (переломов, растяжений, ушибов и т.д.), обычно проводится с помощью специальных тестов для спортсмена по выполнению определенных физических упражнений.
Способы анализа качества движений, как правило, основаны на применении датчиков для измерения параметров движения (обычно это перемещение части тела (угловое или линейное), скорость или (и) ускорение, сила, время выполнения упражнения или удержание какого-либо параметра, количество повторов упражнения), а также каких-либо вычислительных и регистрирующих устройств.
Так, например, в наиболее простом виде такой способ контроля и анализа может включать в себя использование плоского листа - хранителя изображения, на котором с помощью специального пишущего устройства, соединенного с исследуемой частью тела, наносят метки до начала и после окончания движения. Затем полученное изображение подвергается анализу [Заявка на изобретение РФ №97100008, А61В 5/103, опубл. 1999.02.10]. Очевидно, что такой способ отличается простотой и низкой стоимостью реализации, но он далек от совершенства в смысле удобства его применения, информативности получаемых данных, автоматизации выполнения теста и обработки данных.
Существует много других более производительных способов и систем для исследования двигательных функций, в которых используются элементы, жестко прикрепляемые к исследуемым частям тела и осуществляющие механическую передачу движений к угломерным устройствам. Так, в устройстве [Пат. РФ №2215467, А61В 5/103 опубл. 2003.11.10] такое угломерное устройство выполнено в виде шкалы или указателя, шарнирно связанного с элементами, перемещаемыми вместе с исследуемой конечностью. Однако недостатком таких способов анализа движений является то, что в них стесняются движения спортсмена из-за жесткого способа крепления измерительных устройств.
Полностью освободить спортсмена от контакта с механическими датчиками можно только способами, в которых осуществляется бесконтактная, например оптическая, регистрация движений.
Например, известен способ изучения движения объекта [Пат. США №6266136, G01B 011/26, НКИ 356/139.03, опубл. July 24, 2001], заключающийся в закреплении на объекте (спортивном снаряде) отражающих меток, освещении объекта в процессе движения, регистрации сигналов фотоприемников, воспринимающих переотраженное от меток-отражателей излучение, и последующем вычислении с помощью компьютера координат объекта. Однако точность определения координат таким способом невысока и, кроме того, требуется довольно сложная процедура калибровки. Неудобным и не всегда приемлемым является также закрепление на изучаемом объекте отражательных меток.
Известны также способы, реализуемые на основе фотографической записи движений, кино- или видеозаписи [Уткин В.Л. Биомеханика физических упражнений. - М.: Просвещение, 1989, гл.3].
Преимущества таких способов очевидны: полное отсутствие механического контакта со спортсменом, универсальность применения, большие возможности по компьютерной обработке полученной информации.
Наиболее близким по технической сущности к предлагаемому способу является способ [Патент РФ №2233685, МПК А63В 71/00, опубл. 10.08.2004 / Зайцев В.К. и др. Способ контроля и анализа биомеханических параметров спортсменов] контроля и анализа движений спортсмена, заключающийся в съемке видеокамерой изучаемых движений, передаче в компьютер полученного видеофрагмента, задании контрольных точек на теле спортсмена или снаряде на первом кадре, отслеживании их положения на всех последующих кадрах, вычислении траекторий движения контрольных точек и их математическом анализе с помощью компьютера.
В данном способе не требуется размещение специальных отражающих меток на спортсмене или снаряде, а отслеживание положения контрольной точки, показанной на первом кадре, по всем последующим кадрам, происходит в автоматическом или ручном режиме.
Недостатком способа является то, что в случае, если между камерой и изучаемой контрольной точкой возникает помеха (судья, тренер, ассистент, часть снаряда и т.д.), то даже ее кратковременное появление приводит к сбою отслеживания движения контрольной точки, и даже при отслеживании в ручном режиме часть полезной информации теряется или искажается.
Техническая задача, решаемая данным изобретением, заключается в повышении помехозащищенности метода за счет аппаратной избыточности и исключения из обработки кадров с искаженной информацией.
Задача решается тем, что в известный способ контроля и анализа движений спортсмена, заключающийся в съемке видеокамерой изучаемых движений, передаче в компьютер полученного видеофрагмента, задании контрольных точек на теле спортсмена или снаряде на первом кадре, отслеживании их положения на всех последующих кадрах, вычислении траекторий движения контрольных точек и их математическом анализе с помощью компьютера, введены следующие отличительные признаки и операции: при съемке используют не менее двух видеокамер, которые подключают к компьютеру через синхронизирующее устройство и устанавливают так, что возможная помеха, появляющаяся перед одной из камер и закрывающая для нее в определенный момент какую-либо контрольную точку, не закрывает в то же время эту точку для других камер, а при вычислении траекторий выявляют кадры на видеофрагментах всех камер, где контрольная точка закрыта помехой, и исключают эти кадры из дальнейшей обработки, а для остальных кадров рассчитывают координаты контрольной точки, затем для одноименных кадров производят осреднение вычисленных координат по всем видеофрагментам.
Предлагаемый способ проиллюстрирован на чертеже. Схематично (вид сверху) показаны спортсмен 1, снаряд 2 (например, штанга), контрольная точка 3 (для примера расположенная на торце грифа штанги), видеокамеры 4, 5, 6, синхронизирующее устройство 7, компьютер 8, возможная помеха для видеосъемки 9. Камеры 4, 5, 6 располагают таким образом, чтобы при появлении возможной помехи 9 контрольная точка 3 оставалась бы в зоне видимости хотя бы одной из камер.
Способ реализуется следующим образом. На компьютере 8 производят запуск программы записи видеоизображений, которая посредством устройства синхронизации 7 инициирует одновременное включение видеокамер 4, 5, 6 в режиме записи. Спортсмен 1 при этом выполняет упражнение. Контролируемая точка 3 находится в зоне видимости всех камер. Если в процессе выполнения упражнения появляется помеха 9, она может закрыть контрольную точку 3 для одной или двух камер, но хотя бы для одной камеры эта точка остается видимой. По окончании упражнения с компьютера 8 подают команду остановки записи, и посредством синхронизирующего устройства 7 инициируется синхронная остановка записи всех камер. Далее по команде с компьютера 8 организуют последовательную перезапись записанных видеофрагментов из памяти видеокамер 4, 5, 6 (функции которой могут выполнять флэш-карты или кассеты с магнитной лентой) в память компьютера 8. В частном случае, если видеокамеры являются аналоговыми, компьютер 8 дополнительно выполняет функцию преобразования аналогового вида записи в цифровой. В итоге в памяти компьютера будут записаны по одному стандартному цифровому видеофрагменту одинаковой длины для каждой из камер. Далее на компьютере 8 запускают программу отслеживания положения контрольной точки 3 для каждого из видеофрагментов. При этом на первом кадре каждого видеофрагмента показывают курсором положение контрольной точки и производят калибровку расстояний, которая заключается в показе на видеокадре известных расстояний по вертикали и по горизонтали в плоскости, для которой предполагается дальнейшее построение траектории движения точки, и вводе с клавиатуры соответствующих известных истинных значений. Например, при изучении движений тяжелоатлетов в качестве контрольной точки часто берут центр торца грифа штанги и исследуют ее траекторию в вертикальной плоскости, перпендикулярной грифу. Для калибровки в этом случае удобно использовать изображения ближайших к камере дисков штанги, которые имеют стандартный диаметр 45 см. Можно использовать и плоские разметочные калибры, устанавливаемые в интересующей плоскости движения. После калибровки в памяти компьютера сохраняются коэффициенты пересчета координат экранных пикселей в истинные прямоугольные декартовы координаты для каждого из видеофрагментов. Далее запускают программу автоматического отслеживания положения контрольной точки для каждого из видеофрагментов. Последовательность действий этой программы основана на поиске на каждом последующем кадре центра небольшой области, наиболее похожей на область такого же размера с центром, совпадающим с положением контрольной точки на текущем кадре. Найденный центр наиболее похожей области принимается за следующее положение контрольной точки и осуществляется переход к следующему кадру и т.д. При этом оператору представляются уже пересчитанные с учетом калибровочных коэффициентов истинные значения координат (например, в сантиметрах). До тех пор, пока на видеофрагментах отсутствует помеха, вычисленные значения координат осредняют путем сложения значений соответствующих координат, полученных от разных видеокамер, и делением сумм на число видеокамер. Тем самым существенно уменьшается случайная погрешность отслеживания контрольной точки. Если же на каком-либо из видеофрагментов появляется перекрывающая контрольную точку помеха, то процесс отслеживания на этом видеофрагменте тормозят и на время действия помехи этот видеофрагмент исключают из вычисления осредненных координат контрольной точки. Таким образом, осреднение вычисленных координат производят для одноименных кадров (кадров с одинаковым номером) по всем видеофрагментам, исключая кадры с закрытой контрольной точкой. В частном случае, когда контрольная точка открыта только для одной камеры, осреднение не производят.
Осредненные координаты затем используют для графического представления полученной траектории контрольной точки, а также для других вычислений и построения различных зависимостей (например, временных зависимостей перемещений, скоростей и ускорений).
Таким образом, описанный способ, благодаря введенной аппаратной избыточности и примененной последовательности выполнения операций, выгодно отличается от известных, обеспечивая повышенную помехозащищенность отслеживания положения контрольных точек, а при отсутствии помехи - уменьшение случайной погрешности отслеживания координат контрольных точек.
Для удобства реализации способа все необходимые операции имеет смысл выполнять в диалоговом режиме в среде программы-оболочки, из которой осуществляется запуск других описанные выше программ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексный способ контроля и анализа движений соревновательного упражнения жим лежа спортсменов с поражением опорно-двигательного аппарата занимающихся пауэрлифтингом | 2016 |
|
RU2618104C1 |
| СПОСОБ ТРЕНИРОВКИ ТЕХНИЧЕСКИХ И ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ В ИГРОВЫХ ВИДАХ СПОРТА | 2012 |
|
RU2491975C1 |
| СПОСОБ ОЦЕНКИ ВЫПОЛНЕНИЯ ДВИЖЕНИЙ ЧЕЛОВЕКА ПОСРЕДСТВОМ МАШИННОГО ЗРЕНИЯ | 2023 |
|
RU2819503C1 |
| УСТРОЙСТВО ДЛЯ БИОМЕХАНИЧЕСКОГО КОНТРОЛЯ ТЕХНИЧЕСКОЙ И ФИЗИЧЕСКОЙ ПОДГОТОВЛЕННОСТИ ТЯЖЕЛОАТЛЕТОВ | 2017 |
|
RU2658255C1 |
| СПОСОБ КОНТРОЛЯ И АНАЛИЗА БИОМЕХАНИЧЕСКИХ ПАРАМЕТРОВ СПОРТСМЕНОВ | 2003 |
|
RU2233685C1 |
| СПОСОБ БИОМЕХАНИЧЕСКОЙ И ЭЛЕКТРОМИОГРАФИЧЕСКОЙ ОЦЕНКИ ТЯЖЕЛОАТЛЕТИЧЕСКИХ УПРАЖНЕНИЙ | 2020 |
|
RU2756567C1 |
| Способ оценки двигательных действий спортсмена в бадминтоне | 2019 |
|
RU2702822C1 |
| СПОСОБ ОЦЕНКИ БИОМЕХАНИЧЕСКИХ ПАРАМЕТРОВ ДВИЖЕНИЙ СПОРТСМЕНОВ | 2006 |
|
RU2329845C2 |
| СИСТЕМА И СПОСОБ НЕЙРОТРЕНИНГА С ИСПОЛЬЗОВАНИЕМ ИГРОВОЙ СРЕДЫ | 2023 |
|
RU2829688C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ВОССТАНОВЛЕНИЯ 3D СЦЕНЫ ПРОИСХОДЯЩЕГО НА СПОРТИВНОМ СООРУЖЕНИИ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2020 |
|
RU2763270C1 |
Изобретение относится к области спортивной медицины и может быть использовано для контроля и анализа качества выполнения спортсменами различных движений и управления тренировочным процессом. Производят синхронную видеосъемку движений спортсмена несколькими видеокамерами. Передают в компьютер полученные видеофрагменты и затем вычисляют траекторию контрольной точки. Камеры устанавливают так, чтобы возможная помеха, появляющаяся перед одной из камер и закрывающая для нее в определенный момент какую-либо контрольную точку, не закрывала эту точку для других камер. При вычислении траекторий выявляют кадры на видеофрагментах всех камер, где контрольная точка закрыта помехой, и исключают эти кадры из дальнейшей обработки. Для остальных кадров рассчитывают координаты контрольной точки, затем для одноименных кадров производят осреднение вычисленных координат по всем видеофрагментам. Техническим результатом является повышение помехозащищенности отслеживания положения контрольных точек на теле спортсмена или снаряде. 1 ил.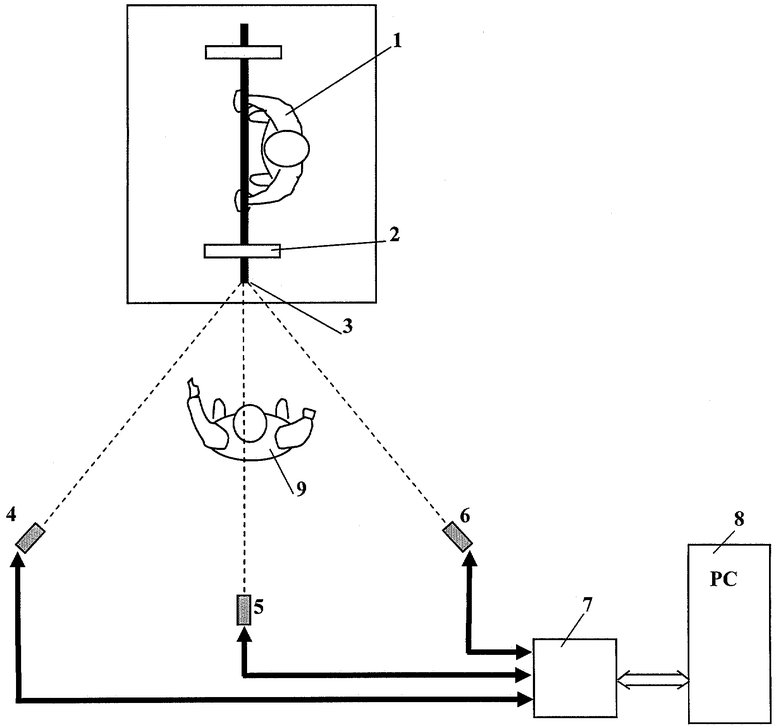
Способ контроля и анализа движений спортсмена, заключающийся в съемке видеокамерой изучаемых движений, передаче в компьютер полученного видеофрагмента, задании контрольных точек на теле спортсмена или снаряде на первом кадре, отслеживании их положения на всех последующих кадрах, вычислении траекторий движения контрольных точек и их математическом анализе с помощью компьютера, отличающийся тем, что при съемке используют не менее двух видеокамер, которые подключают к компьютеру через синхронизирующее устройство и устанавливают так, что возможная помеха, появляющаяся перед одной из камер и закрывающая для нее в определенный момент какую-либо контрольную точку, не закрывает в то же время эту точку для других камер, а при вычислении траекторий выявляют кадры на видеофрагментах всех камер, где контрольная точка закрыта помехой, и исключают эти кадры из дальнейшей обработки, а для остальных кадров рассчитывают координаты контрольной точки, затем для одноименных кадров производят осреднение вычисленных координат по всем видеофрагментам.
| СПОСОБ КОНТРОЛЯ И АНАЛИЗА БИОМЕХАНИЧЕСКИХ ПАРАМЕТРОВ СПОРТСМЕНОВ | 2003 |
|
RU2233685C1 |
| Электронно-лучевая лампа для микроволн | 1940 |
|
SU62024A1 |
| Способ получения железных красок различных оттенков | 1935 |
|
SU43469A1 |
| JP 10263126 А, 06.10.1998. | |||

