Изобретение относится к области удовлетворения жизненных потребностей человека и может быть использовано в туризме, спорте, при проведении спасательных и армейских операций.
Заявляемая конструкция, прежде всего, предназначена для снятия нагрузки с мышц и скелета человека при переноске тяжестей. Экзоскелетон, принимая на себя вертикальную составляющую веса груза, разгружает позвоночник, суставы и ноги человека при ходьбе, поэтому устройство также может использоваться и в медицинской технике, в частности в травматологии и ортопедии.
Известно большое количество технических решений экзо или «внешних» скелетов, реализующих идею разгрузки, состоящих из каркаса с элементами крепления к туловищу, двух пар рычагов, шарнирно соединенных между собой, которые выполняют функции бедра и голеностопа, а также с каркасом и опорой стопы. Например, по патентам РФ №№2116063 (А61Н 3/00, публ. 27.07.1998), 2200529 (А61Н 3/00, публ. 20.03.2003), 12029 (А63В 25/00, публ. 16.12.1999), 2110243 (А61Н 3/00, публ. 10.05.1998). Указанные устройства приводятся в движение под действием мышц, поэтому относятся к пассивным конструкциям. Также известны активные экзоскелетоны, приводимые в действие внешними активаторами, например закрепленными на каркасе двигателями. Например, используемые в американской армии (см. сайт http://www.defencetalk.com/, заявки США US 2005/0258210 (A45F 3/04, 24/11/2005) и US 2007/056592 (A61G 15/00, 15/03/2007), международные заявки WO 2005/046941 (B25J 9/00, 26/05/2005), WO 2004043307 (A61F 5/01, 27/05/2004)).
Все вышеперечисленные конструкции являются либо очень сложными и дорогими, а следовательно, требовательными в обслуживании, либо не обеспечивают достаточной подвижности, а следовательно, комфорта и безопасности перемещения.
Техническим результатом, на обеспечение которого направлено заявляемое техническое решение, является максимальная разгрузка тела человека при повышенной подвижности и безопасности перемещения.
Указанный технический результат достигается тем, что в пассивном грузовом экзоскелетоне, содержащем каркас с элементами крепления к туловищу, две пары тазобедренных и голеностопных рычагов, соединенных между собой посредством шарнирного узла с элементом фиксации и шарнирно связанных направляющими, переходящими с передней на заднюю часть корсета (кокона), при этом соединение рычагов с корпусом осуществляется посредством компенсатора, установленного с возможностью перемещения по направляющим при изменении угла между каркасом и тазобедренным рычагом, а рычаги выполнены в виде пространственных оболочек, например С-образных, размещаемых с возможностью фиксации на передней части бедра и голени элементами крепления, при этом по внешней поверхности оболочки выполнены горизонтальные шлицы, а элемент крепления к опорам стоп выполнен в виде соединительного узла, фиксируемого на обуви с возможностью поворота стопы вокруг трех осей координат.
В заявляемой конструкции используется компенсатор, содержащий один ведущий и два ведомых барабана-редуктора, связанных друг с другом, например, тросом. Ведущий барабан-редуктор установлен в блоке ведущих барабанов, а ведомые барабаны-редукторы - в верхнем и нижнем корпусах компенсатора.
Шарнирный узел заявляемого устройства представляет собой кинематическую пару двух рычагов, состоящую из двух тормозных дисков и зажимной втулки.
Заявляемая конструкция пассивного экзоскелетона поясняется графическими материалами.
На фиг.1 показана схема работы экзоскелетона.
На фиг.2 - конструкция «коленного» шарнира с функцией тормоза.
На фиг.3 - конструкция компенсатора.
На фиг.4 - пример выполнение оболочек.
Как показано на фиг.1, каркас экзоскелетона состоит из передней 1 и задней 2 частей корсета (кокона), соединенных в верхней части двумя шарнирами 3. Шарниры нужны для того, чтобы в раскрытом состоянии надевать и снимать экзоскелетон. По бокам расположены фиксаторы 4, удерживающие корсет в закрытом состоянии, обеспечивая плотную посадку корсета на теле человека. Поверх оболочек расположены направляющие, например коробчатые профили 5 и 6, которые играют роль силового каркаса, передающего нагрузку от груза через систему рычагов на опору экзоскелетона. Пояс 7 помогает фиксировать каркас на теле. Компенсаторы 8, перемещаясь верхней платформой 9 по коробчатым профилям 5, уменьшают или увеличивают длину корпуса в зависимости от угла между корпусом и конечностью. Шарнир 10 позволяет конечности отклоняться в бок. Шарнир 11 выполняет две функции: позволяет поднимать и опускать конечность и управляет перемещением компенсаторов 8.
Тазобедренные и голеностопные рычаги 12 и 13 выполнены, например, в виде пространственных, зеркально расположенных С-образных оболочек, размещаемых с возможностью фиксации на передней части бедра и голени элементами крепления 14, при этом по внешней поверхности оболочек выполнены горизонтальные шлицы 15, которые обеспечивают возможность перемещения конечности или стопы вокруг общей вертикальной оси. Тазобедренные и голеностопные рычаги 12 и 13 соединены шарнирами 16, что позволяет ноге сгибаться в колене. Шарниры 16 одновременно являются и тормозными устройствами, которые можно включать и отключать по необходимости. Если человек с грузом спускается по наклонной плоскости или по лестнице, то включение тормозных устройств снимет нагрузку с мышц сгибающейся ноги, разгибаться конечность будет без усилий.
Голеностопные рычаги 12 соединяются с соединительным узлом опоры стоп через ползун 17, который обеспечивает вращение вокруг общей вертикальной оси. Соединительный узел стопы 18 представляет собой соединенную через шарнир 19 вилку 20, которая через шарнир 21 соединена с опорой 22, вставленной в интегрированную обувь 23, что в комплексе обеспечивает три степени свободы движения стоп, а именно возможность углового перемещения вокруг осей XYZ.
Коленный шарнир с функцией тормоза, показанный на фиг.2, состоит из двух тормозных дисков 24, 25 и зажимной втулки 27. Тормозные диски расположены таким образом, что неподвижный тормозной диск 24 жестко закреплен элементами крепления, например винтами или клепкой, на одном из рычагов коленного сустава, например на голеностопном рычаге 13, а другой тормозной диск 25 посажен на ось шарнирного соединения рычагов 12 и 13 и является подвижным и имеет две степени свободы - угловое и продольное перемещение относительно оси. Храповой механизм 26 рычага 12 обеспечивает зацепление тормозного диска 25 с рычагом. Тормозной диск 25 и храповой механизм 26 рычага 12 обеспечивают жесткую фиксацию диска относительно рычага при вращении в одну сторону и свободное вращение диска относительно рычага при вращении в противоположную. Такое исполнение позволяет притормаживать тормозными дисками при вращении голеностопного рычага 13 относительно тазобедренного рычага 12 в сторону сгибания ноги и совершать вращение рычагов в противоположную сторону без торможения.
Управление усилием торможения коленного шарнира обеспечивает зажимная втулка 27. Зажимная втулка 27 выполнена таким образом, что располагается на одной оси вращения тормозных дисков 24 и 25, причем одним концом связана резьбовым соединением с тормозным диском 24, а противоположным опорным фланцем через буфер 30 - с тормозным диском 25. Момент затяжки зажимной втулки 27 и тормозного диска 24 обеспечивает управление усилием сжатия тормозных дисков 24 и 25. Опорный фланец зажимной втулки 27 выполнен так, что обеспечивает зацепление с храповым механизмом 28. Опорный фланец зажимной втулки 27 и храповой механизм 28 рычага 12 обеспечивают жесткую фиксацию зажимной втулки 27 относительно рычага 12 при вращении в сторону сгибания ноги и свободное вращение зажимной втулки относительно рычага при вращении в противоположную. Такое исполнение позволяет предотвращать самопроизвольное выкручивание зажимной втулки, а также обеспечивает дополнительный момент затяжки зажимной втулки 27 при вращении голеностопного рычага 13 относительно тазобедренного рычага 12 в сторону сгибания ноги.
Отключение тормозного механизма осуществляется благодаря отключению фиксатора 29 храпового механизма 28 и освобождением тормозного диска 25 от зацепления с тормозным диском 24 зажимной втулкой 27.
Компенсатор, показанный на фиг.3, состоит из верхнего корпуса компенсатора 31, блока ведущего барабана 36 и нижнего корпуса компенсатора 37. Блок ведущих барабанов 36 шарнирно связан через шарнир отклонения 35 и ось 42 с верхним и нижним корпусами 31, 37 компенсатора. Верхний корпус компенсатора состоит из корпуса 31, барабана-редуктора 32, троса вращения 33 и троса перемещения 34, намотанного на барабан-редуктор 32 и закрепленного концами на коробчатом профиле 5 экзоскелетона. Нижний корпус компенсатора состоит из корпуса 37, барабана-редуктора 38, троса вращения 39 и троса перемещения 40, намотанного на барабан-редуктор 38 и закрепленного концами на платформе 43 тазобедренного рычага 12. Тросы вращения 33 и 39 с одной стороны жестко закреплены на осях барабанов-редукторов 32 и 38, а с другой - на ведущем барабане 41 блока ведущих барабанов 36, причем трос вращения 33 проходит через шарнир отклонения 35. Такое исполнение связи барабанов-редукторов 32, 38 и блока ведущих барабанов 36 задает необходимую величину вращения барабанов-редукторов 38 и 32 в зависимости от изменения угла между блоком ведущих барабанов 36 и нижним корпусом компенсатора 37, что происходит при сгибании ноги или наклоне тела. Вращение барабанов-редукторов 32 и 38 приводит к наматыванию на них тросов перемещения 34 и 39 и, как следствие, смещению связанных с ними коробчатого профиля 5 и платформы 43 тазобедренного рычага относительно корпуса компенсатора. Такая схема работы компенсатора позволяет достичь соблюдения необходимой длины рычагов при несоосности суставов человека и экзоскелетона.
Максимальный эффект достигается при ходьбе по горизонтальной поверхности или при перемещении человека в экзоскелетоне по наклонной поверхности вниз (например, по лестнице).
При подъеме по наклонной поверхности кости ног принимают на себя часть нагрузки, мышцы ног работают, как обычно, но позвоночник максимально разгружен, так же как при движении в экзоскелетоне по горизонтали.
При спуске по наклонной поверхности нагрузка с мышц ног снимается с помощью тормозных узлов, находящихся в коленных суставах экзоскелетона. Данные узлы можно включать и отключать в зависимости от рельефа местности.
Пассивный экзоскелетон не увеличивает силу человека (так как не имеет дополнительных источников энергии).
Для груза массой 50 кг вес экзоскелетона составит 5-7 кг (зависит от материалов).
Данная конструкция будет полезна:
1) спортсменам - туристам, альпинистам, водникам, спелеологам, дайверам и т.д.;
2) армии - помимо снаряжения, которое должен носить солдат, на экзоскелет можно навесить дополнительную бронезащиту. В данном экзоскелете солдат сможет перемещаться даже со сломанной ногой и при этом нести груз;
3) МЧС - перенос пострадавших в условиях, где затруднено использование носилок, перенос грузов.
В экзоскелетоне можно (в случае необходимости) часами висеть на веревке (кровеносные сосуды и мышцы не передавливаются).
Примеры
1. Альпинист, сорвавшийся со склона или провалившийся в трещину. Рюкзак при этом можно не сбрасывать.
2. Спасение солдата с поля боя или пострадавшего в стихийном бедствии с помощью вертолета, если нет времени или возможности поднять его внутрь летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ, СПИННОЙ КАРДАННЫЙ УЗЕЛ И КОЛЬЦЕВОЙ КАРДАН ГРУЗОВОГО ЭКЗОСКЕЛЕТА | 2014 |
|
RU2563209C2 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
| ЭКЗОСКЕЛЕТОН | 1994 |
|
RU2110243C1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| КОЛЕННЫЙ ШАРНИР ЭКЗОСКЕЛЕТОНА | 2012 |
|
RU2506932C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| Промышленный экзоскелет для верхних и нижних конечностей | 2021 |
|
RU2793174C1 |
| ЭКЗОСКЕЛЕТОН | 1995 |
|
RU2110244C1 |
| ЭКЗОСКЕЛЕТОН | 1994 |
|
RU2075986C1 |
| ЭКЗОСКЕЛЕТОН | 1994 |
|
RU2117470C1 |
Изобретение относится к удовлетворению жизненных потребностей человека и может быть использовано в туризме, спорте, при проведении спасательных и армейских операций. Изобретение направлено на максимальную разгрузку организма человека при повышенной подвижности и безопасности перемещения. Пассивный грузовой экзоскелетон содержит каркас с элементами крепления к туловищу, две пары тазобедренных и голеностопных рычагов, соединенных между собой посредством коленных шарниров с элементами фиксации и шарнирно связанных свободными концами с каркасом и опорами стоп. Каркас выполнен в виде двухчастного корсета с укрепленными на нем продольными направляющими, переходящими с передней на заднюю часть корсета. Соединение рычагов с каркасом осуществляется посредством компенсатора, установленного с возможностью перемещения по направляющим при изменении угла между каркасом и тазобедренным рычагом. Рычаги выполнены в виде пространственных оболочек, размещаемых с возможностью фиксации на передней части бедра и голени элементами крепления. Элемент крепления к опорам стоп выполнен в виде шарнирного узла, фиксируемого на обуви с возможностью поворота стопы вокруг трех осей координат. 3 н. и 3 з.п. ф-лы, 4 ил.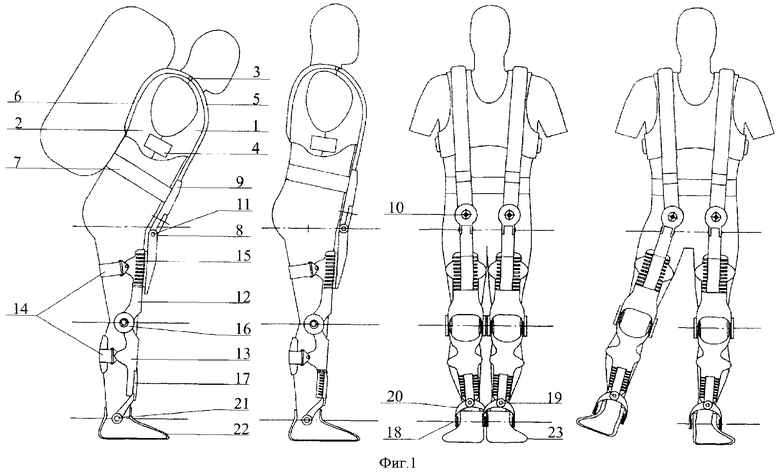
1. Пассивный грузовой экзоскелетон, содержащий каркас с элементами крепления к туловищу, две пары тазобедренных и голеностопных рычагов, соединенных между собой посредством коленных шарниров с элементами фиксации, и шарнирно связанных свободными концами с каркасом и опорами стоп, отличающийся тем, что каркас выполнен в виде двухчастного корсета, с укрепленными на нем продольными направляющими, переходящими с передней на заднюю часть корсета, при этом соединение рычагов с каркасом осуществляется посредством компенсатора, установленного с возможностью перемещения по направляющим при изменении угла между каркасом и тазобедренным рычагом, а рычаги выполнены в виде пространственных оболочек, размещаемых с возможностью фиксации на передней части бедра и голени элементами крепления, а элемент крепления к опорам стоп выполнен в виде шарнирного узла, фиксируемого на обуви с возможностью поворота стопы вокруг трех осей координат.
2. Пассивный грузовой экзоскелетон по п.1, отличающийся тем, что пространственные оболочки выполнены С-образными, по внешней поверхности которых выполнены горизонтальные шлицы.
3. Пассивный грузовой экзоскелетон по п.1, отличающийся тем, что продольные направляющие выполнены в виде коробчатых профилей.
4. Пассивный грузовой экзоскелетон по п.1, отличающийся тем, что элемент крепления к опорам стоп выполнен в виде шарнирно соединенной опорой интегрированной обуви вилки, установленной с возможностью горизонтального перемещения относительно пространственной оболочки.
5. Коленный шарнир пассивного грузового экзоскелетона, характеризующийся тем, что состоит из двух тормозных дисков, зажимной втулки, находящихся на оси шарнирного соединения рычагов, при этом зажимная втулка одним концом связана с неподвижным тормозным диском, а противоположным концом, выполненным в виде опорного фланца, через буфер с подвижным тормозным диском, связанным с одним из рычагов, по меньшей мере, одним храповым механизмом.
6. Компенсатор пассивного грузового экзоскелетона, характеризующийся тем, что состоит из ведомых барабанов верхнего и нижнего корпусов и блока ведущего барабана, связанных тросом, с образованием кинематических пар с взаимно-перпендикулярными осями вращения.
| US 20070056592 A1, 15.03.2007 | |||
| US 5282460 A, 01.02.1994 | |||
| WO 2004043307 A1, 27.05.2004 | |||
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ОПОРНОЙ НАГРУЗКИ С ТАЗОБЕДРЕННОГО СУСТАВА | 2000 |
|
RU2200529C2 |
| Лампа для светолечения | 1927 |
|
SU12029A1 |
| УСТРОЙСТВО ДЛЯ ХОДЬБЫ | 1994 |
|
RU2116063C1 |
| ЭКЗОСКЕЛЕТОН | 1994 |
|
RU2110243C1 |

