Заявляемое техническое решение промышленного экзоскелета для верхних и нижних конечностей относится к устройствам, облегчающим перемещение грузов при помощи ручного труда, предназначено для автоматизации решения определенных задач с увеличением физических возможностей человека и может быть использовано в быту и на производстве, например, при проведении погрузочно-разгрузочных и сборочных работ, а также для транспортировки тяжелых грузов.
Известен пассивный грузовой экзоскелетон по патенту РФ на изобретение №2362598 от 10.09.2007 г., опубл. 20.03.2009 г., содержащий каркас с элементами крепления к туловищу, две пары тазобедренных и голеностопных рычагов, соединенных между собой посредством коленных шарниров с элементами фиксации, и шарнирно связанных свободными концами с каркасом и опорами стоп, причем каркас выполнен в виде двухчастного корсета, с укрепленными на нем продольными направляющими, переходящими с передней на заднюю часть корсета, при этом соединение рычагов с каркасом осуществляется посредством компенсатора, установленного с возможностью перемещения по направляющим при изменении угла между каркасом и тазобедренным рычагом, а рычаги выполнены в виде пространственных оболочек, размещаемых с возможностью фиксации на передней части бедра и голени элементами крепления, а элемент крепления к опорам стоп выполнен в виде шарнирного узла, фиксируемого на обуви с возможностью поворота стопы вокруг трех осей координат.
Общим признаком является наличие спинного каркаса, присоединяемого к спине оператора с помощью ремней.
Недостатком конструкции аналога по патенту РФ на изобретение №2362598 является недостаточная подвижность корпуса, недостаточно высокие эргономические характеристики использования и безопасности перемещения. Кроме того, пассивный грузовой экзоскелетон разработан только для нижних конечностей.
Известен экзоскелет для облегчения перемещения человеком груза (ПРОТОТИП) по патенту РФ на полезную модель №202205 от 24.08.2020 г., опубл. 05.02.2021 г., состоящий из стоп с возможностью передачи нагрузки от груза опорной поверхности, голеней, связывающих узлы стоп и коленей, бедер, при этом связи узлов голеней и бедер содержат настройку под Х-образность ног, пояса, пластины поясничного узла, плеч, отличающийся тем, что стопы выполнены в виде U-образной формы с горизонтальной поперечной осью вращения, выполнены с возможностью жесткого закрепления на обуви и имеют скругленные носки с упругими элементами, соединенными с голеностопными узлами, расположенными с тыльной стороны ног, выполненными в виде пары «винт-гайка» и регулирующими высоту каркаса голени, обеспечивая при этом сведение и разведение стопы; каркасы голеней и бедер выполнены в виде спиралей, обтекающих ноги человека, при этом на каждой паре каркасов бедро-голень предусмотрены по два крепежных щитка, один из которых через шаровую опору соединен с каркасом экзоскелета с возможностью вращения; при этом щитки выполнены в виде пространственных оболочек прямоугольной формы с закругленными, облегающими ногу краями и имеют прорези для протягивания ремней, выполненных из неэластичного материала в форме «гармошки» с возможностью линейного удлинения и имеющих амортизирующие прокладки; коленные суставы состоят из пружин, коленных ограничителей и защитных полусфер, являющихся неотъемлемой частью каркаса бедер; тазовые узлы выполнены с возможностью регулировки высоты каркаса бедер и выполнены в виде пар «винт-гайка»; пояс состоит из двух дуг и копчика посередине и выполнен в виде буквы «С», по контуру которого с внутренней стороны пропущен ремень для закрепления его на теле человека, при этом на дугах пояса имеются фланцы для установки дополнительного оборудования, а на копчике установлен поясничный узел, имеющий шарнир, обеспечивающий наклоны туловища «влево-вправо» и вращение вдоль оси позвоночника, а также пластину поясничного узла с закрепленной на ней велкротканью для присоединения и регулировки каркаса спины, который выполнен в виде Т-образной рамы, на концах которой закреплены плечевые дуги, имеющие возможность вращения, и ограничители плечевых дуг для предотвращения складывания их под действием внешней нагрузки, а также лямки для крепления на плечи человека.
Общими признаками заявляемого технического решения прототипа по патенту РФ на полезную модель №202205 является каркас с элементами крепления на спине, пояснице, бедрах и голенях оператора.
Отличия прототипа по патенту РФ на полезную модель №202205 и заявляемого технического решения обусловлены особенностями конструкции, а именно: в заявляемом техническом решении промышленного экзоскелета для верхних и нижних конечностей есть следующие конструктивные особенности: наличие силового модуля, включающего в себя приводы, электрически связанные с адаптивной системой управления.
Недостатками конструкции прототипа по патенту РФ на полезную модель №202205 является то, что данное устройство может работать только в узком диапазоне рабочих нагрузок из-за своей пассивности, кроме этого, конструкция устройства достаточно сложна, из-за наличия большого количества составляющих конструктивных элементов. Вышеперечисленные недостатки существенно снижают область применения данного экзоскелета, а также снижают работоспособность оператора.
Данные недостатки преодолены в заявляемом техническом решении.
При исследовании уровня развития техники не выявлены решения, тождественные заявляемому решению.
Заявляемое техническое решение характеризуется следующими особенностями: - функционально соединенными между собой силовым модулем и модулем крепления, - модуль крепления включает в себя спинной каркас, присоединяемый к спине оператора с помощью ремней, - силовой модуль включает в себя приводы, установленные на каркасе и кинематически связанные посредством передач с гибкими связями с бедренными шарнирами, - приводы электрически связаны с адаптивной системой управления, которая размещена в корпусе.
Признаки, отличающие заявляемое техническое решение от прототипа, не выявлены в других технических решениях при изучении данной и смежных областей техники. Совокупность заявляемых признаков обеспечивает достижение основной задачи изобретения - повышение работоспособности оператора.
Цель разработки заявляемого технического решения промышленного экзоскелета для верхних и нижних конечностей - расширение функциональных возможностей применения, в частности, удобства использования человеком и повышения работоспособности оператора.
Технической проблемой, на решение которой направлена заявляемое изобретение, является расширение арсенала технических средств при создании промышленных экзоскелетов, а также отмеченные в уровне техники недостаточная подвижность, недостаточно высокие эргономические характеристики и узкий диапазон рабочих нагрузок экзоскелетов известных конструкций. Заявляемое изобретение разработано для того, чтобы решить вышеуказанную проблему и повысить эффективность работы устройства, увеличить удобство и расширить диапазон рабочих нагрузок.
Техническая задача настоящего изобретения заключается в создании промышленного экзоскелета для верхних и нижних конечностей такой конструкции, которая бы расширяла сферу использования устройства, была более удобна в эксплуатации и в использовании.
Техническим результатом заявляемого изобретения является, прежде всего, реализация совокупности технических элементов конструкции, позволяющих расширить арсенал технических средств, а также повышение эффективности с расширением сферы использования, что обеспечивает удобство эксплуатации.
Технический результат достигается тем, что заявляемое устройство промышленного экзоскелета для верхних и нижних конечностей содержит функционально соединенные между собой силовой модуль и модуль крепления, а модуль крепления включает в себя спинной каркас, присоединяемый к спине оператора с помощью ремней, при этом силовой модуль включает в себя приводы, установленные на каркасе и кинематически связанные посредством передач с гибкими связями с бедренными шарнирами, причем приводы электрически связаны с адаптивной системой управления, которая размещена в корпусе. Тем самым повышается стабильность работы оборудования по сравнению с работой известных подобных устройств.
Сущность изобретения выражается в совокупности существенных признаков, достаточной для реализации его назначения.
Сущность заявляемого технического решения состоит в том, что промышленный экзоскелет для верхних и нижних конечностей включает каркас с элементами крепления, причем каркас является частью модуля крепления, а модуль крепления, силовой модуль и модуль переноски груза соединены между собой, при этом модуль крепления включает в себя спинной каркас, присоединяемый к спине оператора с помощью ремней, а силовой модуль включает в себя приводы, установленные на каркасе и кинематически связанные посредством передач с гибкими связями с бедренными шарнирами, при этом модуль переноски груза включает в себя пространственный рычажный двухзвенный механизм, причем один конец первого звена связан с каркасом посредством шарнира, ось которого расположена в вертикальной плоскости, а второй конец связан с другим звеном посредством шарнира, ось которого расположена в горизонтальной плоскости, причем второе звено шарнирно связано с манжетой, установленной на предплечье оператора, при этом рычажный механизм дополнительно снабжен накопителем упругой энергии, причем корпус накопителя шарнирно связан с первым звеном рычажного механизма, а шток накопителя шарнирно связан со вторым звеном рычажного механизма.
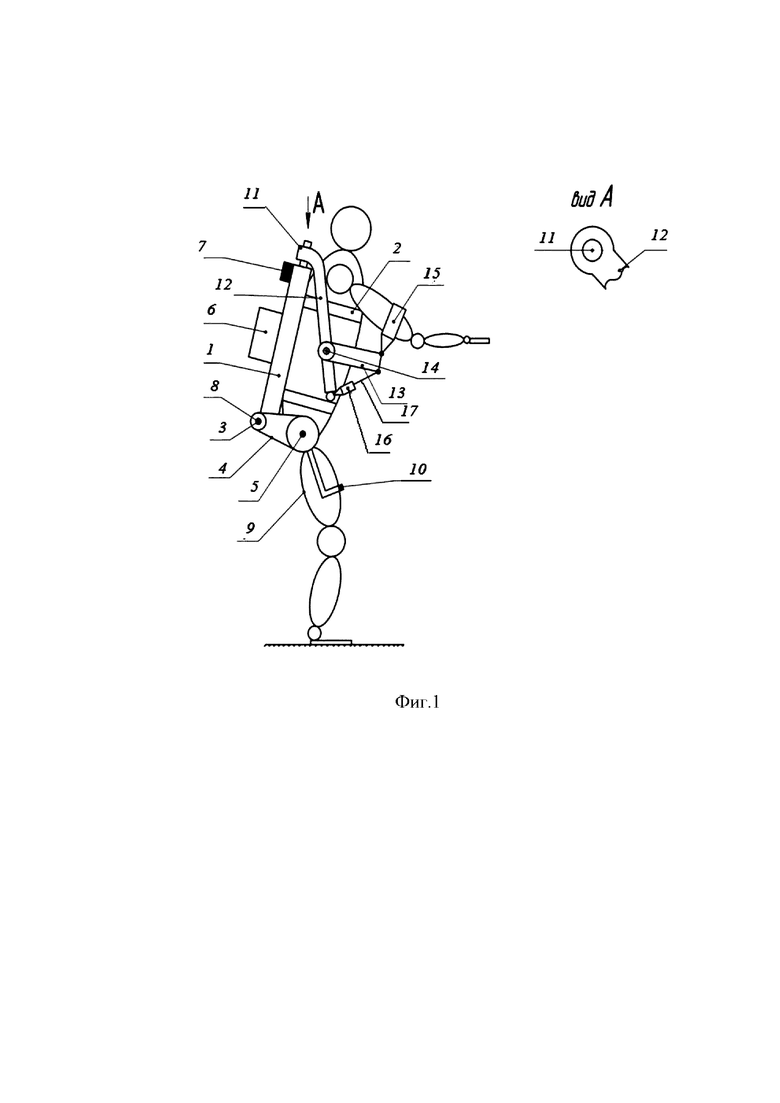
Сущность устройства промышленного экзоскелета для верхних и нижних конечностей поясняется чертежом (Фиг.1), на котором изображен общий вид заявляемого экзоскелета.
Заявляемое техническое решение проиллюстрировано с помощью Фиг.1, где:
1 - спинной каркас;
2 - ремни;
3 - привод;
4 - передача с гибкими связями;
5 - бедренный шарнир;
6 - корпус;
7 - датчик угла наклона спины экзоскелета;
8 - датчик относительного угла;
9 - бедро каркаса;
10 - датчик силового взаимодействия;
11 - цилиндрический шарнир;
12 - первое звено пространственного рычажного механизма;
13 - подвижно присоединенное звено;
14 - шарнир, расположенный в горизонтальной плоскости;
15 - манжета, установленная на плече оператора;
16 - корпус накопителя упругой энергии;
17 - шток накопителя.
Заявляемый экзоскелет предназначен для оказания помощи работникам, в обязанности которых входит подъем и перенос грузов.
Экзоскелет включает в себя два активных модуля переноски грузов, соединенных с каркасом 1. В силу идентичности модулей, дальнейшее описание выполняется для одного активного модуля. Наличие двух модулей позволяет выполнять работу оператором как для двух ног одновременно, так и для каждой ноги в отдельности.
В состав экзоскелета входит спинной каркас 1, присоединяемый к спине оператора с помощью ремней 2. На каркасе 1 установлен привод 3, кинематически связанный посредством передачи с гибкими связями 4 с бедренным шарниром 5. На каркасе 1 закреплен корпус 6, внутри которого установлена система управления (на фиг.1 не показана), электрически связанная с бортовым источником питания, подсистемой управляемых электроприводов, силовым каркасом и движителями. На каркасе 1 установлен датчик угла наклона спины экзоскелета 7 и датчик 8 относительного угла между бедром 9 и спинной частью каркаса 1. На бедренной части каркаса 1 установлен датчик 10 силового взаимодействия между бедром 9 оператора и бедренным шарниром 5. К каркасу 1 с помощью цилиндрического шарнира 11, расположенного в вертикальной плоскости присоединяется первое звено12 пространственного рычажного механизма. К звену 12 подвижно присоединено звено 13 с помощью шарнира 14, расположенного в горизонтальной плоскости. Второй конец звена 13 закреплен шарнирно на манжете 15, установленной на предплечье оператора. На рычажном механизме дополнительно установлен накопитель упругой энергии, причем корпус накопителя 16 шарнирно связан с первым звеном12 рычажного механизма, а шток накопителя 17 шарнирно связан со вторым звеном 13 рычажного механизма. Система управления, размещенная в корпусе 6(на чертеже не показана) электрически связана с бортовым источником энергии, подсистемой управляемых электроприводов, силовым каркасом и движителями (на схеме не показаны), установленными на корпусе 6 экзоскелета.
Устройство работает следующим образом. При подъеме груза сигналы с датчиков 7, 8 и 10 поступают систему управления, где после обработки сигналов формируется управляющее напряжение, с помощью которого происходит управление движения приводами, работа которых позволяет помогать осуществлять подъем груза и перемещение оператора. При выполнении технологических операций (подъем и переноска грузов) в горизонтальной и вертикальной плоскостях осуществляется поворот звена 12 относительно корпуса 1 и поворот звена 13 относительно звена 12. Это позволяет выполнять повороты плеча оператора и предплечья относительно плечевого и локтевого суставов (на чертеже не показаны). При подъеме руки оператора одновременно включается накопитель упругой энергии, при этом шток 17 выдвигается за счет потенциальных сил упругости, возникающих в накопителе. При приложении внешней нагрузки (подъем груза и т.п.), шток 17 опускается вниз, а упругий элемент в корпусе 16 сжимается, восстанавливающая сила увеличивается, что приводит к перемещению штока 17 вверх, попутно поднимая звено 13 вместе с манжетой 15, установленной на предплечье оператора. Таким образом, работа оператора с грузом происходит не только за счет работы мышц руки, но и дополнительно за счет сил, создаваемых при отдаче потенциальной энергии накопителем.
Предлагаемый экзоскелет может найти применение в металлургии, машиностроении, строительстве, при чрезвычайных ситуациях и в других отраслях, где требуется работа по переноске и подъему грузов. Также использование предлагаемого устройства позволяет значительно расширить рабочую зону, снизить нагрузку на человека-оператора и усилить его физические возможности при работе с тяжелыми грузами, а также увеличить его работоспособность.
Возможность многократного воспроизведения заявляемой конструкции проистекает из способа ее промышленной комплектации, что позволяет воспроизводить заявляемое устройство робота в промышленных масштабах.
Подобное сочетание универсальности, достижения возможности многократного воспроизведения с относительной простотой изготовления в прототипе не достигнуто.
Исходя из вышеизложенного, можно сделать вывод о том, что заявляемое техническое решение соответствует критериям «новизна», «изобретательский уровень» и «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| Экзоскелет | 2023 |
|
RU2823489C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| ПНЕВМАТИЧЕСКИЙ ЭКЗОСКЕЛЕТ | 2020 |
|
RU2747593C1 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ, СПИННОЙ КАРДАННЫЙ УЗЕЛ И КОЛЬЦЕВОЙ КАРДАН ГРУЗОВОГО ЭКЗОСКЕЛЕТА | 2014 |
|
RU2563209C2 |
| Экзоскелет | 2023 |
|
RU2833109C1 |
| Экзоскелет для поддержки корпуса и нижних конечностей человека | 2024 |
|
RU2839503C1 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
Изобретение относится к медицине, а именно к промышленному экзоскелету для верхних и нижних конечностей. Экзоскелет включает каркас. Каркас является частью модуля крепления. Модуль крепления, силовой модуль и модуль переноски груза соединены между собой. Модуль крепления включает в себя присоединяемый к спине оператора с помощью ремней (2) спинной каркас (1). Силовой модуль включает в себя приводы (3), установленные на каркасе и кинематически связанные посредством передач (4) с гибкими связями с бедренными шарнирами (5). При этом модуль переноски груза включает в себя пространственный рычажный двухзвенный механизм. Один конец первого звена (12) связан с каркасом посредством шарнира, ось которого расположена в вертикальной плоскости, а второй конец связан с вторым звеном (13) посредством шарнира (14), ось которого расположена в горизонтальной плоскости. Второе звено шарнирно связано с манжетой (15), установленной на предплечье оператора. Рычажный механизм снабжен накопителем упругой энергии. Корпус (16) накопителя шарнирно связан с первым звеном рычажного механизма. Шток накопителя (17) шарнирно связан со вторым звеном рычажного механизма. Обеспечивается свободное движение кисти оператора, разгрузка гравитационных сил непосредственно на предплечье и локтевом суставе, дополнительное увеличение физических возможностей человека за счет совокупности технических элементов конструкции, применения пространственного рычажного механизма, шарнирных связей и связи звеньев рычажного механизма с помощью гравитационного компенсатора, а также возможность управления движением экзоскелета с учетом заданного закона движения центра масс и информации о силовом взаимодействии ноги человека и экзоскелета в соответствующих фазах движения. 1 ил.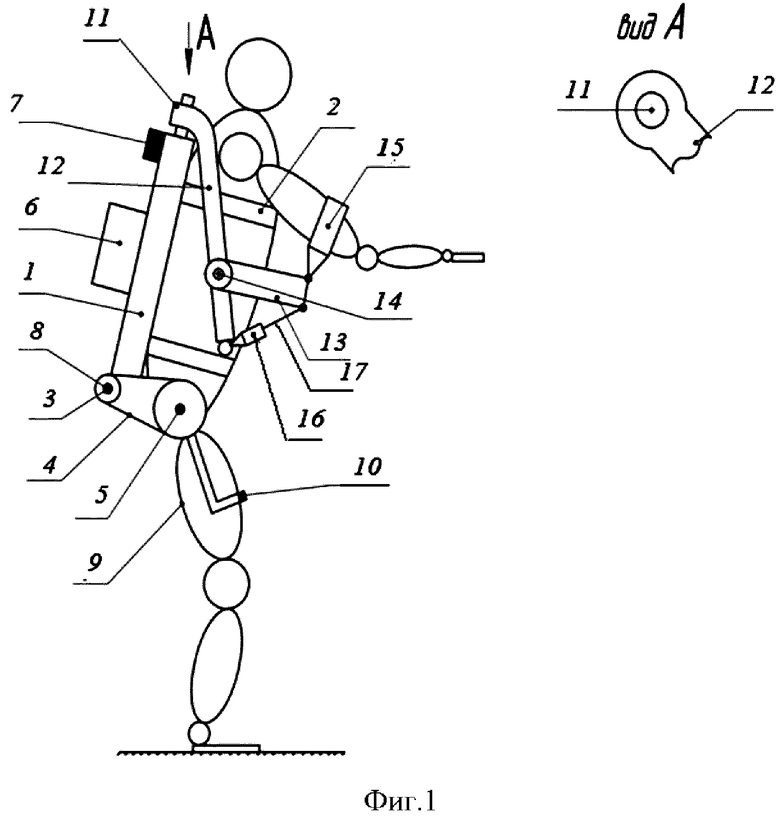
Промышленный экзоскелет для верхних и нижних конечностей, включающий каркас, отличающийся тем, что каркас является частью модуля крепления, а модуль крепления, силовой модуль и модуль переноски груза соединены между собой, при этом модуль крепления включает в себя спинной каркас, присоединяемый к спине оператора с помощью ремней, а силовой модуль включает в себя приводы, установленные на каркасе и кинематически связанные посредством передач с гибкими связями с бедренными шарнирами, при этом модуль переноски груза включает в себя пространственный рычажный двухзвенный механизм, причем один конец первого звена связан с каркасом посредством шарнира, ось которого расположена в вертикальной плоскости, а второй конец связан с вторым звеном посредством шарнира, ось которого расположена в горизонтальной плоскости, причем второе звено шарнирно связано с манжетой, установленной на предплечье оператора, при этом рычажный механизм дополнительно снабжен накопителем упругой энергии, причем корпус накопителя шарнирно связан с первым звеном рычажного механизма, а шток накопителя шарнирно связан со вторым звеном рычажного механизма.
| Экзоскелет верхних конечностей | 2016 |
|
RU2629738C1 |
| CN 110876262 A, 10.03.2020 | |||
| US 2019083350 A1, 21.03.2019 | |||
| US 20120184880 A1, 19.07.2012 | |||
| US 20190380903 A1, 19.12.2019 | |||
| CN 110744528 A, 04.02.2020 | |||
| CN 107984461 A, 04.05.2018 | |||
| CN 106965154 A, 21.07.2017 | |||
| WO 2020204009 A1, 08.10.2020 | |||
| US 10561515 B2, 18.02.2020 | |||
| DE 102016121201 A1, 09.05.2018 | |||
| WO 2020038850 A1, 27.02.2020. | |||

