Предшествующий уровень техники
В течение многих лет предпринимались попытки управления роторными (буровыми) комбайнами непрерывного действия с помощью гамма-детекторов и различных других датчиков. Для формаций, которые имеют характерный радиационный профиль, таких как калиевые формации, гамма-детекторы оказались перспективными для управления резанием или содействия операторам в этом. Вместе с тем, результаты были хуже ожидаемых вследствие недостатков самих гамма-детекторов, недостаточных возможностей систем и недостатков в способах применения оборудования.
Имеется большой экономический эффект от возможности выделения высокосортных минералов при оставлении минералов низкого сорта в шахте. Дело не только в цене, связанной с резанием и удалением нежелательных материалов, но и в необходимости отделения полезных материалов от отходов, а также в необходимости размещения отходов. Имеется также необходимость в определении сорта добываемой руды. Предшествующие попытки определения сорта руды с помощью гамма-детекторов не были эффективны по некоторым из тех же причин, по которым не обеспечивается эффективность управления резанием. Для определения сорта необходимо иметь возможность измерения толщины пластов, уровня излучения каждого пласта, а также возможность расчета количества добытого материала из каждого пласта. Предшествующие и современные способы не обеспечивают достаточной точности выполнения расчетов по причинам, указанным ниже.
Анализ традиционных вариантов управления буровыми комбайнами непрерывного действия с помощью гамма-детекторов показал, что при применении гамма-детекторов, они не размещались надлежащим образом для обеспечения выполнения необходимых измерений. Часто детекторы располагались на каркасе комбайна, в 6-12-ти футах от передней поверхности разрезаемой формации. Детекторы, расположенные на много футов от передней поверхности, производили измерения там, где бур уже прошел, а не там, где бур находится в данный момент. Если имеется решение о перемещении бура вверх или вниз, при том, что гамма-детекторы способны измерить эффект от этого решения, то буровая машина или гусеничный трактор будут взбираться на вновь срезанный ярус, согласно принятому решению о резании, или спускаться с него. При этом эффекты от решения о резании усиливаются и режимы устанавливаются тогда даже для преувеличенного отклика. Дополнительно некоторые рабочие динамические эффекты, если они не откорректированы, будут приводить к минимальным отклонениям от идеального курса, даже в случае относительного постоянства формации. Кроме того, детекторы размещаются на корпусе комбайна на фиксированных положениях. Многочисленным детекторам с фиксированными положениями и со специально выбранными зонами обзора необходимо получать точные данные излучения от видимых пластов. Физические ограничения не позволяют использовать необходимое число детекторов и практически делают невозможным достижение идеальной зоны обзора.
Ясно, что имеется много практических причин для того, чтобы не размещать гамма-детекторы вблизи или на вращающихся резцах комбайнов непрерывного действия. Первая трудность заключается в монтаже детектора на роторах, связанная с пространственно-геометрическими ограничениями. Используются два или четыре ротора, чередующиеся при их вращении. Если детекторы выполнены достаточны малыми для их помещения в имеющееся пространство без перекрытия с противостоящим ротором, то может оказаться, что они недостаточно чувствительны. Другая трудность заключается в том, что большинство промышленных гамма-детекторов не способны выдерживать ударные воздействия, вибрацию и абразивное истирание при нахождении вблизи резца или на нем. Даже если нет повреждения из-за условий эксплуатации, то они могут порождать ложные счетные импульсы при воздействии ударной нагрузки или сильной вибрации. Эти ложные счетные импульсы ухудшают рабочие характеристики. Нет никакого простого материала для надлежащей защиты гамма-детекторов, такой, чтобы при этом сохранялась достаточно большая зона обзора, обеспечивалось требуемое высокое пространственное разрешение, и чтобы они были достаточно малы для необходимого размещения на роторе.
Датчики перемещения или другие подходящие датчики, такие как датчики положения, а также связанные с ними микроконтроллеры или процессоры требуют измерений, согласованных с положением разрабатываемой формации, а также обработанных измерений, в случае множественных пластов руды. Обеспечение достаточного питания сенсоров и передатчиков на роторе является другим специальным требованием, возникающим при размещении оборудования на роторе. Необходимость обеспечения питания детекторов на роторах требует либо батарейных модулей, либо гравитационных генераторов на роторах, щеток (токосъемных колец) для передачи питания через вращающийся вал, поддерживающий роторы, или какого-либо другого подходящего механизма. Передача данных от детекторов на управляющие системы внутрь комбайна представляет собой другую проблему. В конечном счете, при выполнении этих и других специальных условий, в дополнение к фундаментальным ограничениям по имеющимся детекторам, все же остаются недостатки варианта смонтированных на роторе гамма-детекторов, которые могут привести к нежелательным последствиям при его использовании.
Сохраняется необходимость в эффективной системе бурового комбайна непрерывного действия. Смонтированные на роторе гамма-детекторы и связанное с ними аппаратное обеспечение способны представлять собой более эффективную управляющую систему, но требуют решения многих новых проблем.
Патент CША №6435619, например, полностью включенный в настоящее описание посредством ссылки, включает некоторые инновации, относящиеся обычно к камерной выемке или длинному забою с помощью комбайна непрерывного действия барабанного типа.
Хотя объекты настоящего изобретения предназначены для использования при добыче различных руд, в первую очередь описание настоящего изобретения относится к добыче калия, но может быть отнесено и к добыче другого типа, в которой имеется излучение формации. Например, это может быть подземная добыча каменного угля и троны.
Для управления по вертикали комбайна непрерывного действия на формации калия требуется знать положение комбайна относительно залежей минеральных пластов на формации, а также знать качество руды в этих пластах. Излучение калия обычно пропорционально концентрации калия в минеральном пласте. Чем больше концентрация калия, тем выше уровень излучения. Посредством измерения уровня излучения, испускаемого минеральными пластами, разрезаемыми комбайном, можно определить положение комбайна относительно этих пластов. Данные таких измерений могут также использоваться для определения сорта вырабатываемой руды.
Поскольку толщина минерального пласта не постоянна, то определения положения комбайна относительно одного пласта не достаточно для надлежащего его управления. Требуется также и точная информация о толщине пластов. Или, как по вышеупомянутому способу, необходимо знать множество границ пластов, которые разрезает комбайн. Важно также знать качество руды в верхней части пласта (обозначаемой также как "свод" или "потолок") и на дне (называемом также "подошвой") шахты. Знание расположения руды и ее сорта позволяет выполнять регулярное управление комбайна на геологической формации, оптимизируя качество добываемого минерала.
Требуется также управление креном для удержания комбайна на подошве, которая часто имеет изменяющийся наклон от одной стороны к другой. Для выполнения управления креном, т.е. наклоном от одной стороны к другой, требуется знание положения комбайна относительно минеральных пластов по обеим сторонам комбайна. Если в качестве основы для управления креном используются измерения гамма-излучения, то необходимо получить данные от стенок по каждой стороне комбайна так, чтобы головки резца можно было расположить в соответствии с наклоном пласта. Выполнив это, комбайн будет продвигаться до новой разрезаемой подошвы, имеющей разный наклон от одной стороны к другой, и таким образом выравниваться в соответствии с пластом. Если наклон комбайна изменяется так же, как и наклон вырабатываемых пластов, то головки вращающихся резцов возвратятся к их изначальной ориентации относительно корпуса комбайна. Для достижения надлежащего управления головки резцов должны быть приспособлены для отклика на информацию о разрезаемой формации, располагаемой впереди комбайна.
Поскольку проходческое оборудование, включая любые используемые гамма-детекторы, облучается всеми имеющимися поверхностями разрабатываемой формации, то датчики должны быть защищены со всех направлений, отличных от круга допуска для интересуемого пласта. Иначе говоря, датчик должен воспринимать излучение, приходящее только с направления желаемой целевой области, и не реагировать на излучение со всех других направлений.
Минералы, такие как калий, существуют в слоях или пластах. Измерения вдоль плоскости пласта предоставляют более простые для интерпретации данные, нежели измерения перпендикулярно пласту. Перпендикулярно пластам трудно определить, какая именно часть излучения исходит от ближайшего к детектору пласта, а какая испускается удаленными пластами. До некоторой степени этого можно избежать с помощью данных гамма-спектра, вместо суммарного счета гамма-импульсов.
Идеальным вариантом, если он достижим, было бы размещение малого детектора вблизи торцов одной лопасти на каждом роторе так, чтобы детектор мог измерять излучение, приходящее в плоскости от пластов разрезаемой передней грани забоя. При этой конфигурации детекторы имеют обозрение исключительно перед резцом. Если это достигнуто, то расположенные таким образом детекторы позволяют осуществить необходимое вертикальное управление. Однако при осуществлении такого идеального варианта встречаются практические проблемы. Весьма затруднительно, если вообще возможно, закрепить датчики так, чтобы они могли выдвигаться и убираться вместе с резцами роторов. Выдвигающиеся резцы необходимы для избежания их зажимов между сводом и подошвой из-за естественного провисания свода при резании шахты. Также для обеспечения малой зоны обзора и обрамляющего малого телесного угла, независимо от положения ротора, требуется коллимационное устройство значительной длины, если только сцинтилляционый элемент не достаточно мал. Добавление большой коллимационной трубы делает общий монтаж вблизи торцов резца еще более трудным. Но если сцинтилляционый элемент достаточно мал и защитная коллимационная труба мала, то скорость счета импульсов достаточно низка для обеспечения статистически точных данных. Кроме того, если зона обзора является малой по сравнению со сцинтилляционым элементом, то телесный угол, окружающий целевую область на формации, очень мал по сравнению с телесным углом для любого другого направления. Затем значительная защита требуется для снижения отсчетов фоновых импульсов. В конце концов, эти соображения делают нереальным размещение гамма-детектора вблизи торцов резца и с передним обзором.
В связи с вышеназванными проблемами, возможно размещение детектора вдали от роторной лопасти и вблизи ступицы. Но и это нельзя считать приемлемым, поскольку возрастает требование к коллимации, а также и к защите коллиматора, и ни пространство, ни место не позволяют разместить типичные детекторы так, чтобы они были эффективны. Проблема представляется слишком сложной, особенно если используются обычные промышленные гамма-детекторы. Для преодоления вышеназванных проблем требуется объединение аппаратных средств и системной стратегии.
Имеется способ и структура системы, обеспечивающие очень хорошие результаты. Детектор может быть помещен на роторную лопасть так, что он имеет обзор по радиальному направлению на поверхность, циркулярно вырезаемую вращающимся резцом. Если детектор достаточно мал и не слишком выступает за лопасть ротора в направлении ступицы, то это удачное размещение, и он будет близок к поверхности минерала. Это размещение идеально при использовании детектора, имеющего относительно большое отношение длины к диаметру, причем по ряду важных причин. Первая заключается в том, что важно обеспечить узкую зону обзора в направлении, перпендикулярном пластам, но также важно иметь зону обзора, достаточно широкую для обеспечения требуемой чувствительности. Размер сцинтилляционного элемента, вполне подходящего для этого случая, составляет 2 дюйма на 10 дюймов, а ориентирован он должен быть так, чтобы его длинная ось была параллельна минеральным пластам. При такой форме легче сконфигурировать защитный экран для обеспечения зоны обзора, узкой в одном направлении, в котором требуется хорошее пространственное разрешение, и широкой в другом направлении, где пространственное разрешение гораздо менее важно. Когда лопасть ротора горизонтальна и детектор обращен горизонтально на пласты, на их профиль, то узкая зона обзора важна для непринятия излучения от пластов, находящихся выше и ниже измеряемого. Когда лопасть вертикальна, то желательно иметь хорошее разрешение для детектирования пересечения поверхностей у свода. Наличие широкой зоны обзора в направлении вперед-назад, параллельно минеральным пластам, увеличивает чувствительность без снижения разрешения в тангенциальном направлении для всех положений ротора.
Другое важное достоинство использования сцинтилляционного элемента, имеющего вытянутую форму, заключается в том, что он не требует много места над лопастью ротора. Это особенно важно для тех роторных конструкций, в которых мало места между противоположными роторами. Также эта форма позволяет разместить весь детектор вблизи края роторной лопасти так, что он находится вне траектории конца лопасти противоположного ротора, кроме той части, которая достаточно низка для того, чтобы не сталкиваться с лопастью на противоположном роторе. Если используется обычная конфигурация кристалла со скругленной облучаемой поверхностью, то для коллимации требуется цилиндрическая трубка. Длина этой трубки должна быть, по меньшей мере, в два раза больше диаметра кристалла, и возможно еще длиннее, для достижения приемлемого пространственного разрешения. Вместо указанного, детектор может иметь относительно малый диаметр, обеспечивая хорошее пространственное разрешение, а также предоставляя место для добавления большей защиты с целью снижения эффекта от фонового излучения, улучшая тем самым отношение сигнал/шум.
Некоторые пояснения могут быть полезны для лучшего понимания влияния зоны обзора детектора на его чувствительность. Полная чувствительность детектора данного размера и типа представляет собой интеграл от зоны обзора по площади кристалла. Более точно - чувствительность есть интеграл от излучения, испускаемого объемом минерала, по объему детектора. Поскольку гамма-излучение имеет широкий спектр энергий, особенно после рассеяния при распространении от источника до детектора, то некоторая его часть тормозится и отсчитывается вблизи поверхности сцинтилляционного элемента. Излучение высокой энергии стремится проникнуть далее в объем сцинтилляционного элемента до того, как оно будет продетектировано. Некоторая его часть реально проходит через сцинтилляционный элемент и не отсчитывается. Поэтому полная чувствительность детектора определяется и экспонируемой площадью поверхности, и его эффективным объемом. Для оценки и обсуждения будет достаточно точным сравнить конфигурации исходя из площадей, а не объемов, пока сравниваемые средние толщины сцинтилляционных элементов подобны.
Большая чувствительность критична для смонтированного на роторе детектора, поскольку обзор постоянно перемещается при повороте ротора. Данные от каждого сегмента стенки шахты, свода и подошвы должны быть собраны и просуммированы в течение такого времени для получения достаточных данных для устранения статистической природы излучения. Менее чувствительные детекторы требуют больше времени для получения необходимого набора данных.
Лучшее понимание значимости фактора формы для детектора следует из упрощенного рассмотрения взаимосвязи формы детектора и желаемой формы зоны обзора. Рассмотрим типичный промышленный гамма-детектор, имеющий сцинтилляционный элемент диаметром 4 дюйма и толщиной 2 дюйма. На многих конструкциях комбайновых роторов отсутствует место для монтажа защищенного должным образом детектора, который содержит кристалл диаметром 4 дюйма. Если предположить, что место для детектора такого размера имеется, то рассматривая кристалл диаметром 4 дюйма и добавляя материалы, необходимые для поддержания и защиты его от вибрирующего окружения, а затем добавляя толстый защитный экран на детектор и на коллимационную трубу, в результате получим дополнительную высоту, по меньшей мере, от 3 до 4 дюймов. Кроме того, коллимационная труба должна быть соразмерно длинной для достаточного ограничения зоны обзора в тангенциальном направлении, что приводит к высоте детектора, по меньшей мере, 8 дюймов, а возможно и более. Разумно предположить, что длина коллимационной трубы, по меньшей мере, в два раза больше диаметра сцинтилляционного элемента. Это заставляет удалить центр сцинтилляционного элемента приблизительно на 20 дюймов от поверхности минерала. При 20-ти дюймах главной зоны обзора площадь поверхности минерала, который находится в обзоре всей передней поверхности сцинтилляционного элемента, приблизительно составляет 20 квадратных дюймов, или окружность диаметром приблизительно 5 дюймов. Более важно то, что частичная зона обзора, которая обозревает, по меньшей мере, 50% объема сцинтилляционного элемента, составляет приблизительно 75 квадратных дюймов, что соответствует окружности диаметром приблизительно 10 дюймов. Площадь поверхности сечения такого кристалла диаметром 4 дюйма должна составлять приблизительно 12,6 квадратных дюймов. Чувствительность частичной зоны обзора будет составлять приблизительно произведение 75-ти квадратных дюймов частичной зоны обзора и 12,6 квадратных дюймов площади.
Для сравнения, надлежащим образом сконструированный детектор, имеющий размеры 2 дюйма на 10 дюймов, имеет площадь поверхности 20 квадратных дюймов. Объем протяженного кристалла также на 25% больше, чем у кристалла диаметром 4 дюйма и толщиной 2 дюйма. Кроме того, он может быть размещен приблизительно на 10-11 дюймах от поверхности минерала. Его высота составляет только около 65% от высоты промышленного 4-х дюймового детектора. Частичная, составляющая 50% зона обзора этого протяженного детектора в тангенциальном направлении может быть легко ограничена до 9 дюймов или менее, при желании, тогда как частичная 50%-ая зона обзора в продольном направлении, параллельном плоскости пласта, может достигать 40 дюймов. Величина зоны обзора от 9 до 40 дюймов предоставляет 360 квадратных дюймов площади обзора, которая может быть проинтегрирована по поверхности кристалла в 20 квадратных дюймов. Частичная зона обзора для этого кристалла также будет приблизительно составлять произведение 360-ти и 20-ти. С учетом факторов расстояний ясно, что протяженный кристалл намного более чувствителен. При этой значительно улучшенной чувствительности, по сравнению со сцинтилляционным элементом диаметром 4 дюйма, зона обзора сцинтилляционного элемента в 2 дюйма на 10 дюймов может быть при необходимости еще понижена в продольном направлении при сохранении достаточной чувствительности. Но, в противоположность этому, для понижения зоны частичного обзора 4-х дюймового детектора длина коллимационной трубы должна быть увеличена так, что ее длина будет уже большой проблемой, по меньшей мере, для некоторых конструкций ротора. Таким образом, и так уже низкая чувствительность будет еще далее понижаться.
Гамма-детектор должен иметь фоточувствительное устройство, такое как фотоумножитель (ФЭУ) для преобразования световых вспышек, производимых сцинтилляционным элементом, в электрические сигналы. Этот ФЭУ дополнительно увеличивает длину гамма-детектора, что становится уже серьезной проблемой. Одна из рассматриваемых возможностей заключается в том, чтобы поместить ФЭУ внутрь коллимационной трубы между сцинтилляционным элементом и источником излучения. Хотя это и допустимо, но очевидно нежелательно, поскольку при этом блокируется входящее излучение, особенно излучение с низкой энергией. Эти соображения снова заставляют рассматривать применение меньших кристаллов, соответственно меньших детекторов в целом, но и при сопутствующей значительно меньшей чувствительности детектора. К тому же имеется преимущество в использовании кристалла с предлагаемой в данном случае формой, поскольку меньший диаметр делает возможным использование меньших ФЭУ, с меньшей лицевой частью для входящего света. Это усовершенствуется далее помещением ФЭУ внутрь герметичного корпуса со сцинтилляционным кристалом так, что окно между ними и один оптический ответвитель могут быть исключены. Другие специальные особенности конструкции детектора позволяют дополнительно понизить его длину.
Из предыдущего рассмотрения следует, что имеется значительная конкуренция между доступным пространством, необходимой зоной обзора, требованиями коллимации, достаточно большим сцинтилляционным элементом и требованиями защитного экранирования. Типичный промышленный детектор, имеющий круглую сцинтилляционную грань, обрамленную коллимационной трубой, не вполне подходит для удовлетворения требованиям к конфигурации, рабочим параметрам и надежности. Вышеприведенные рассуждения исходили из гипотетического сцинтилляционного элемента диаметром 4 дюйма для более наглядного сравнения. В действительности большая часть, если не все, промышленных детекторов, используемых в настоящее время на буровых комбайнах непрерывного действия, находятся на фиксированных позициях на корпусе комбайна и имеют сцинтилляционные элементы диаметром только 2 или 3 дюйма. Хотя при этих размерах элементы легче объединяются с ротором, их чувствительность существенно ограничена.
Поскольку детектор на роторе быстро перемещается, обычно около 90° в секунду, количество гамма-излучения, которое может быть измерено за один оборот, не достаточно для управления комбайном. Даже для конфигурации высокочувствительного детектора и рассмотренного выше местоположения сохраняется необходимость в сборе данных гамма-излучения сверх нормы для каждого сегмента, представляющего интерес. Комбайн этого типа обычно продвигается медленно, между 1 и 2 футами в минуту, и изменения наклона формации встречаются редко на многих футах движения, и считывания от многих оборотов ротора могут быть объединены. Также нежелательные отклонения комбайна, вызванные изменениями рабочих режимов, малы на интервале времени 1-2 минуты. Поэтому возможно объединить данные гамма-излучения для многих оборотов. Для объединения данных гамма-излучения для многих оборотов требуется способ согласования каждого отсчета гамма-импульса с положением, а также суммирование измерений, выполненных для каждого положения. Более подробно это будет рассмотрено ниже.
Некоторые сцинтилляционные материалы, такие как иодид натрия, очень хрупкие и легко повреждаются. Известно также, что сцинтилляционные гамма-элементы производят ложные отсчеты при вибрации и ударах, что требует специального конструктивного оформления с целью освобождения от шумов. Для изготовления сцинтилляционного элемента, особенно с относительно большим отношением длины к диаметру, например диаметром 2 дюйма и длиной 10 дюймов, по многим причинам требуется специальное конструктивное оформление. Подробно это будет рассмотрено ниже. Для сохранения пространства размер детектора должен быть насколько возможно минимальным, но при этом обеспечивать использование сцинтилляционного элемента подходящего размера. Настоящим изобретением предоставлены условия для реализации детектора настолько компактного, насколько это возможно, что подробно описывается ниже.
Хорошо сконструированный гамма-детектор для этого приложения пригоден для фотоумножителя (ФЭУ) или другого фотодетектора, непосредственно связанного с сцинтилляционным кристаллом посредством масляно-кольцевого соединителя или какого-либо другого, надежного и высокоэффективного соединителя. Исключение окна, имеющегося обычно между ФЭУ и кристаллом, способствует достижению наивысших возможных рабочих параметров. Конструкция должна быть очень прочной и компактной, что имеет решающее значение для достижения требуемых параметров при имеющемся ограниченном пространстве. Она должна противостоять напряжениям от бурения, ударов, вибрации и трения. Опора для критичной сборки ФЭУ/сцинтилляционный элемент в пределах детектора может быть получена с помощью металлических держателей (таких как гибкие рукава). Подобные специальные двойные гибкие рукава поддерживают электронные устройства и датчики движения в оплетке. Эти устройства обеспечивают очень хорошие динамические свойства и используют минимум пространства. Гибкий рукав для сцинтилляционного элемента имеет зазор для минимизации поглощения входящего гамма-излучения. Фоточувствительный элемент, такой как ФЭУ, должен быть прочным. Эта арматура должна быть со свинцовым наполнением или должна быть изготовленной с применением прочного, высокой плотности металла, такого как вольфрам, для снижения фонового облучения. Неметаллическое высокопрочное окно использовано в арматуре для защиты сцинтилляционного элемента и других аппаратных средств от добываемой руды и при этом обеспечивает малое поглощение входящих гамма-лучей.
Скоростные гироскопы используются для определения направления ориентации детекторов так, что отсчеты гамма-импульсов могут быть сопоставлены с положением. Акселерометр используется для устранения долгосрочного дрейфа или отклонений от выходного сигнала гироскопа и для сопоставления положений роторов относительно центра тяжести. Альтернативный способ устранения долгосрочного дрейфа по измерению скоростного гироскопа может включать магнитные или механические переключатели, неконтактные переключатели, лазерные лучи, шахтные индикаторы положения, акустические датчики и т.д. Например, магнит может быть помещен на противоположный ротор так, что он будет размыкать магнитный датчик в сборке детектора всякий раз, когда противоположный ротор приближается к ротору с размещенной на нем детекторной сборкой. Возможно поместить такой магнит и в другие места комбайна. Использование акселерометра технически предпочтительно, поскольку это есть независимое гравитационное измерение, он может полностью содержаться в пределах сборки детектора и не требует никакой внешней поддержки.
Каждый детектор содержит электронику, в которой блок управления, требуемый для сбора и передачи данных и/или решений на комбайн и друг другу. Обычно эта электроника включает в себя, по меньшей мере, три микропроцессора: микропроцессор для гамма-излучения, микропроцессор перемещения, микропроцессор для логического управления. Участок логического управления собирает данные от других двух микропроцессоров, вырабатывает логические решения, и затем посылает, когда это требуется, решения и данные на комбайн. Если один детектор главный, а другой подчиненный, то большинство решений вырабатывается в главном детекторе. Программируемые микроконтроллеры прерываний являются предпочтительными для выполнения этих функций обработки сигналов вследствие малых размеров и низких требований к питанию.
Прохождение данных от одного детектора, иногда называемого подчиненным детектором, к другому детектору, называемому главным детектором, может быть выполнено посредством различных методик. Радиочастотные передатчики и приемники доступны в конструктивном оформлении очень малых размеров и могут быть с этой целью интегрированы в детекторы. Также данные могут быть посланы от одного детектора через щетки, кольцевые токосъемники или кодирующие устройства на каркас комбайна, а затем могут быть посланы через другой набор щеток, кольцевых токосъемников или кодирующих устройств на детектор другого ротора. Информация может передаваться в обоих направлениях, с использованием таких методик, какие требуются. Сигнальные драйверы включены в блок управления для обеспечения надлежащего отношения сигнал/шум для данных, передаваемых посредством любой из этих методик. Также данные и/или решения о резании от детекторов могут быть посланы на комбайн подобным же образом.
В дополнение к посылке решений о резании на управляющую гидравлику комбайна данные могут передаваться для демонстрации оператору. Блок управления будет делить полное вращение ротора на множество сегментов по окружности. Размер типичного сегмента составляет 4 дюйма вдоль окружности. Гамма-излучение регистрируется непрерывно, и отсчеты гамма-импульсов сопоставляются с сегментом соответствующей зоны обзора. Если детектор добавлен на второй ротор с целью управления креном, то данные от этого детектора будут автоматически связаны с соответствующим сегментом, который будет в отличающемся положении в цикле второго ротора. Однократно на каждом обороте детектор излучения будет посылать через радиочастотный канал данные вместе с управляющими решениями, собранными на предыдущем обороте ротора. Если используется радиочастотный канал, то для экономии питания радиочастотный передатчик может включаться только на короткое время на каждом обороте и в то время, когда ротор находится в наилучшем положении для передачи. Если комбайн укомплектован токосъемными кольцами для каждого роторного вала, то это представляет собой предпочтительную конструкцию, исключающую необходимость в радиочастотном оборудовании.
Специальный источник питания может потребоваться для частей управляющей ротором системы. Это может быть обеспечено с помощью никель-кадмиевых батарей, которые размещаются в другом армированном контейнере, расположенном вблизи детектора. Варианты других средств обеспечения питания системы - система с гравитационным приводом или средство передачи энергии от комбайна через вал на ротор.
Сущность изобретения
Согласно изобретению создана система управления добычей для бурового комбайна непрерывного действия, включающего, по меньшей мере, два роторных резца, имеющих, каждый, лопасти, проходящие от него, содержащая гамма-детектор, расположенный на каждом из, по меньшей мере, двух роторных резцов для приема гамма-излучения, излучаемого геологической формацией, при этом каждый гамма-детектор установлен на одной из лопастей роторного резца таким образом, что гамма-детектор имеет малую зону обзора в направлении, требуемом для идентификации границ в геологической формации и большую зону обзора в направлении, параллельном геологической формации, и систему согласования положения для согласования полученных гамма-излучений с положением одного из, по меньшей мере, роторных резцов, и логический блок, использующий согласованные считывания для определения необходимости перемещения резцов.
Логический блок может сравнивать считывания, соответствующие положениям, по меньшей мере, двух роторных резцов и определять путь перемещения, по меньшей мере, двух роторных резцов вверх и вниз для удержания комбайна выровненным с пластами минералов геологической формации.
Логический блок может передавать на комбайн сигналы, используемые для направления гидравлических цилиндров для перемещения, по меньшей мере, двух роторных резцов в направлении, требуемом для прохождения комбайном геологической формации.
Система может дополнительно содержать дисплей для индикации оператору или передачи на удаленный монитор отсчитываемых гамма-импульсов в зависимости от ориентации резца.
Малая зона обзора в направлении, требуемом для идентификации границ в геологической формации, может определять множество обозреваемых прилежащих сегментов, которые совместно эквивалентны периферии роторного резца, и сравнение гамма-излучений от каждого обозреваемого прилежащего сегмента обеспечивает определение границ в геологической формации логическим блоком.
Множество соседних обозреваемых сегментов могут включать от около 75 до 100 сегментов.
Логический блок может объединять данные от обозреваемых прилежащих сегментов для расчета сорта добываемой руды.
Гамма-детектор может быть установлен на соответствующем резце таким образом, что гамма-чувствительный элемент в каждом гамма-детекторе расположен на расстоянии в пределах 11 дюймов от поверхности геологической формации, срезаемой роторным резцом.
Система согласования положения может содержать акселерометр и скоростной гороскоп для согласования принятого гамма-излучения с положением, по меньшей мере, двух резцов.
Вышеуказанные и другие признаки и достоинства изобретения будут более поняты из нижеследующего подробного описания и чертежей предпочтительных вариантов реализации изобретения.
Краткое описание чертежей
Фиг.1 изображает гамма-детекторы, расположенные на лопастях сдвоенного ротора комбайна непрерывного действия, согласно варианту реализации изобретения.
Фиг.2 - вид поперечного сечения гамма-детектора, показанного на фиг.1, изображающего поле обзора.
Фиг.3 - вид поперечного сечения гамма-детектора, показанного на фиг.1, изображающего поле обзора.
Фиг.4 - вид поперечного сечения гамма-детектора согласно варианту реализации изобретения.
Фиг.5 - вид сверху детектора согласно варианту реализации изобретения.
Фиг.6 - схема движения данных.
Подробное описание предпочтительных вариантов реализации
Как описано выше, гамма-детекторы перспективны для использования в геотехнологических буровых комбайнах непрерывного действия, используемых для бурения минеральных месторождений или месторождений рудных формаций. Два наиболее важных вопроса при создании точного способа направления комбайна на геологическую формацию, содержащую минеральные пласты различной толщины и различного качества, сводятся к размещению гамма-детекторов и к выбору зоны их обзора. Задача заключается в направлении резцов комбайна (фиг.1) в соответствии с измерениями на формации, которую бурит или режет комбайн. Традиционное решение заключается в монтаже детекторов на каркасе комбайна на расстоянии от 4 до 12 футов от разрезаемой грани и в измерении гамма-излучения от верхней, нижней и боковых частей шахты. Поскольку пласты минералов варьируются по толщине, и положение комбайна относительно этих пластов изменяется, то либо вследствие намеренных решений о направлении, либо вследствие изменений самой формации, приходится использовать много гамма-детекторов для точной оценки местоположения границ пласта, если они находятся в фиксированных положениях. Также зоны обзора этих детекторов должны быть очень точно обозначены - требование, накладывающее некоторые весьма серьезные ограничения на размер и чувствительность детекторов. Крайне сложные алгоритмы требуются для разделения многих параметров, определяющих такой подход. В связи с этими серьезными трудностями традиционный подход заключается в использовании нескольких обычным образом выполненных детекторов, и только приблизительно определяются границы пласта и положение комбайна относительно них. Намного лучшее решение заключается в монтаже гамма-детекторов, соответствующим образом выполненных для данного оборудования, на вращающихся резцах, так чтобы они регистрировали излучение, приходящее от пластов, причем имели бы оптимальные для этого зоны обзора. Ниже приводится примерное рассмотрение того, как это достигается.
Буровые комбайны непрерывного действия извлекают минералы из минеральной формации, образуя при этом шахту. Как показано на фиг.1 и 6, два детектора 10, 11 смонтированы на роторных лопастях 16, 17 комбайна 48, который перемещается в направлении, перпендикулярном плоскости, включающей детекторы 10, 11. Один ротор 8 вращается по часовой стрелке, а другой ротор 9 - против часовой стрелки. Некоторые буровые комбайны непрерывного действия имеют четыре ротора, но данное рассуждение применимо и в этом случае. В случае четырехроторного комбайна рассуждение относилось бы к двум внешним роторам.
Предполагается, что показанная на фиг.1 формация состоит из слоев 1-7, или пластов, каждый из которых имеет минеральный состав различного качества. Эти слои 1-7 могут варьироваться по толщине и могут иметь наклон в любом направлении, причем наклон часто изменяется. Таким образом, важно картографировать толщину, местоположение и качество различных слоев 1-7 при резании комбайном формации так, чтобы можно было произвести выбор между более высоким и более низким резанием для извлечения руды наиболее высокого качества.
При размещении детекторов 10, 11 на краю жестких частей роторных лопастей 16, 17 соответственно они оказываются отстоящими приблизительно на 11 дюймов от поверхности минерала и очень близко к поверхности, до которой продвинулись резцы. Гамма-чувствительный элемент детектора выполнен и ориентирован так, чтобы имелась малая зона обзора в направлении, требуемом для идентификации границ пластов 41-46, широких вдоль направления, параллельного пластам. Малость чувствительного элемента в тангенциальном направлении в комбинации с размещением элемента вблизи поверхности минерала позволяет производить измерения для малых сегментов поверхности при вращении роторов 8, 9. Также важна и комбинация имеющейся длины чувствительного элемента в десять дюймов и обеспечение большой зоны обзора в плоскости границ 41-46 пласта, выполняемая для высокой чувствительности на каждом пласте при периодическом прохождении мимо него. Эта чувствительность важна для достаточной скорости счета, при которой достигается высокое пространственное разрешение. При такой конструкции устройства удовлетворяются конкурирующие требования к детектору, малой зоне обзора и высокой чувствительности.
Для идентификации границ 41-46 пласта необходимо иметь скорости счета на каждой стороне каждой границы 41-46, заметно отличающиеся от таковых на другой стороне границ. При периодическом прохождении зоны обзора детектора границ пласта изменение скорости счета гамма-лучей должно быть измерено с достаточной скоростью и разрешением для получения возможности точного выбора на резании. Если используются обычные промышленные гамма-детекторы, и если они расположены, например, в 20 дюймах от поверхности, особенно если детектируемая лицевая поверхность формации округлая, то пространственное разрешение существенно снижается и/или значительно снижается чувствительность, и тогда использование этого подхода представляется недопустимым. Учитывая то, что излучение является статистическим по своей природе, при низкой скорости счета невозможно отличить одну сторону границы от другой. Фактически этот перспективный исход был главным ограничением в ранних подходах и возможно был одним из сдерживающих факторов для других попыток монтажа гамма-детекторов на роторах.
Расположенный на лопасти 16, 17 каждого ротора 8, 9 гамма-детектор 10, 11 предназначен для измерения излучения, испускаемого разрабатываемой формацией 6. Основание для применения двух детекторов, а также способ их совместного использования обсуждаются ниже после рассмотрения некоторых подробностей, большая часть которых применима к обоим детекторам 10, 11. Обсуждение обращено к одному детектору, но все сказанное применимо к обоим детекторам. Исключением является ситуация, когда один детектор выполнен как главный детектор, а другой - как подчиненный детектор. В этом случае подчиненный детектор может иметь до некоторой степени пониженные возможности.
Основная зона детектора 10, показанная на фиг.2, обозревает сегмент 14 поверхности, подлежащей разработке. Внутри детектора 10 имеется гамма-чувствительный элемент 18, обычно диаметром в 2 дюйма и 10 дюймов длиной. Следует отметить, что основная зона обзора, т.е. та, которая образует полностью видимую зону для сечения сцинтилляционного элемента 10, является только малым сегментом срезаемой ротором 8, 9 поверхности. Как только ротор 8, 9 сделает полный оборот, срезаемая каждым ротором 8, 9 поверхность может рассматриваться как имеющая множество сегментов 14, один по соседству с другим. Типичная ситуация такова, что полная окружность ротора 8, 9 делится на 75-100 сегментов, каждый длиной 3-4 дюйма. Из фиг.3 можно видеть, что длина "полной" зоны обзора, т.е. обзор, охватывающий полную длину кристалла, составляет около 24-х дюймов.
Гамма-детекторы 10, 11 выполнены так, чтобы их можно было смонтировать на краю жесткой части лопастей 16, 17. Полезно пояснить, что режущие кромки 24 всех роторных лопастей, включая лопасти 16, 17, на которых монтируются детекторы, могут убираться. Когда комбайн прерывает резание или останавливается, эти режущие кромки убираются так, что оседание верхней части вновь вырытой шахты не задерживает или не зажимает роторы 8, 9 между провисающим сводом шахты и подошвой. Когда роторы начинают вращаться, режущие кромки выдвигаются, придавая роторам 8, 9 их полную форму для резания. Поэтому детекторы 10, 11 должны быть смонтированы на жестком участке лопастей 16, 17.
В соответствии с фиг.2-5 детектор 10 включает центральный участок, имеющий сцинтилляционный элемент 18, производящий вспышки света или сцинтилляции, когда на него воздействуют гамма-лучи 20 от формации. Сцинтилляционный элемент обычно заключается в защитный экран 26, заделываемый герметично, если используется кристалл иодида натрия или какой-либо другой гигроскопичный кристалл. Создаваемые гамма-лучами 20 вспышки света преобразуются в электрический импульс с помощью такого устройства, как фотоумножитель (не показан). Предпочтительно, чтобы этот ФЭУ располагался внутри корпуса с сцинтилляционным кристаллом и был бы непосредственно связан с кристаллом для большей эффективности и меньших размеров. Однако он может располагаться и с внешней стороны корпуса кристалла, или защитного экрана, и воспринимать световые вспышки через окно. Динамическая поддержка элементов детектора включает гибкие рукава 25, 27. Сцинтилляционный элемент окружен свинцовым цилиндром 22, который имеет открытое окно для пропускания гамма-лучей 20 на сцинтилляционный элемент 18. Свинец 22 покрыт оболочкой 21. Толщина свинца 22 в один дюйм и один дюйм стальной оболочки 21 рекомендуются для надежной экранировки и защиты от вырабатываемых материалов. Отверстие окна закрывается прочным неметаллическим материалом 19, таким как полиэфирэфиркетон, для предохранения экрана 26 вокруг сцинтилляционного элемента 18 от ударов добываемыми минералами. Это покрытие 19 окна также удерживает материалы от взаимного влияния вместе с гибкими рукавами 25, 27, которые защищают от вибрации и ударов. Высоковольтный блок 47 питания, показанный на фиг.6, служит для питания сборки ФЭУ/сцинтиллятор 18.
С детектором такого типа, как рассмотрен выше, смонтированным на каждом роторе и расположенным так, чтобы иметь обзор в радиальном направлении, возможно получить очень хорошие чувствительность и пространственное разрешение. Но только при удовлетворении этих основных требований невозможно получить подходящие данные для целей управления. Поскольку роторы постоянно двигаются, то производимые отсчеты гамма-лучей не пригодны для использования, пока не будет известно, где располагаются детекторы при каждом отсчете. Прочные, твердотельные гироскопы пригодны для точного измерения движения ротора. При соответствующем отсчете гироскопа полный оборот роторов может быть поделен на угловые сегменты, которые соответствуют пространственным сегментам вдоль поверхности вырезанной роторами шахты. Отсчеты гамма-импульсов, произведенные тогда, когда детектор направлен на сегмент, могут быть зарегистрированы и затем сопоставлены с данным сегментом.
Показанный на фиг.2 скоростной гироскоп 33 представляет собой наиболее подходящий для этого прибор. Однако гироскоп 33 измеряет скорость вращения, а не положение. Для получения данных от каждого сегмента 1-7 формации необходимо знать угловое положение роторов 8, 9 для идентификации того, когда детекторы 10, 11 направлены на каждый сегмент 1-7 и измеряют излучение 20 от данного сегмента. Способ должен обеспечивать идентификацию надежного начала отсчета, от которого выходной сигнал гироскопа 33 может быть проинтегрирован по времени для расчета положения роторов. Предпочтительный способ получения начального положения использует акселерометр 34. Очевидно, что имеется возможность определения положения роторов с помощью только акселерометра, без использования гироскопа, но это не будет достаточно точно из-за вибрационных и ударных воздействий.
Одна часть лопастного детектора показана на фиг.2, включая блок 30 управления. Блок 35 движения включает гироскоп 33, акселерометр 34 и программируемый микроконтроллер (МК) 37 прерываний, как показано на фиг.6. Микроконтроллер 37 считывает изменения положения, измеренные гироскопом 33, а также считывает гамма-импульсы, производимые сцинтиляционным элементом 18. После считывания гамма-импульсов они сопоставляются с сегментом 1-7, обозреваемым в это же время. Положения лопастей ротора гравитационно нормируются с помощью акселерометра 34. Когда акселерометр 34 направлен на свод шахты, то он считывает максимум, а когда он направлен по горизонтали, он считывает ноль. После надлежащей обработки выходной сигнал акселерометра 34 позволяет определить ориентацию ротора 8, 9. Вследствие вибраций считывания акселерометра 34 должны быть отфильтрованы или усреднены, и затем выполняется регулировка для учета задержки результатов, вызванной фильтрацией или усреднением. Считывания от гироскопа интегрируются по времени и используются для "хода вперед" роторов 8, 9. Управление креном требует знания положения комбайна относительно минеральных пластов с каждой из сторон комбайна, которое получается из измерений движения и расчета. Окончательный выбор на резание осуществляется единственным детектором с использованием информации от обоих детекторов. Данные, собранные и обработанные подчиненным детектором 11, передаются на главный детектор 10 в реальном времени и затем согласовываются с формацией с помощью главного детектора 10. Этот поток данных через радиочастотные каналы или токосъемные кольца указан на фиг.6. Для предотвращения столкновений перекрывающихся лопастей роторов 8, 9, они связаны синхронизацией, обеспечиваемой средствами комбайна. Если нет чрезмерного зазора у роторов, то тогда возможно определить взаимосвязь между направлением каждого детектора и смещением данных таким образом, чтобы сегменты обеих сторон соответствовали одному и тому же возвышению на обеих сторонах. Это завершается в главном детекторе 10 вместе с обработкой данных, как это требуется. Как только система способна точно согласовать измерения на обеих сторонах комбайна, ориентация комбайна относительно оси перемещения, относительно минеральных пластов, может быть рассчитана, а головки резцов могут быть расположены соответственно. Если комбайн взбирается на установленную наклонную подошву, головка возвращается назад в свое номинальное положение, если только наклон подошвы не продолжает изменяться. Подчиненный детектор может содержать гироскоп и акселерометр для независимого определения ориентации ротора, на котором он установлен.
Блок 30 управления выполняет всю обработку данных гамма-излучения и данных о движении для принятия решений о резании. Электрические импульсы от сборки 18 сцинтилляционного гамма-детектора принимаются блоком 40 гамма-излучения, как указано на фиг.6. Эти импульсы накапливаются в соответствии с их уровнями энергии и подсчитываются. Общее число импульсов в пределах каждого накопления, соответствующего уровням энергии, а также общее число импульсов на интервале времени передается затем на логический блок после запроса этим блоком.
С другой стороны, измерения, выполненные акселерометром и гироскопом, посылаются на блок 35 движения, как указано на фиг.6. После обработки блоком движения текущее положение зоны обзора относительно роторного комбайна передается на логический блок 36. Логический блок 36 согласовывает затем данные гамма-излучения с положением и применяет алгоритмы для определения положения комбайна 48 относительно пластов 1-7 формации. Для данного положения комбайна 48 относительно пластов 1-7 осуществляется выбор для выравнивания комбайна 48 с пластами и для вертикального положения комбайна 48 для сохранения в пределах формации так, чтобы вырабатывался высокосортный минерал. Эти решения о резании осуществляются командами на подъем или опускание роторов 8, 9 с помощью панели 44 управления комбайном и с помощью гидравлики 46. В случае угля задача, вообще говоря, заключается в бурении вдоль направления минимального уровня гамма-излучения, тогда как в случае калия задача заключается в бурении вдоль направления максимального гамма-излучения. Данные, включая решения о резании, предоставляются также оператору посредством дисплея 45. Оператор может регулировать то, как комбайн 48 откликается на данные и решения от главного детектора 10 и/или от обоих детекторов 10, 11.
Применяются и другие алгоритмы для определения общего сорта добываемой руды для последующих выборов разработки. Каждый из трех электронных блоков 35, 36, 40 включает микроконтроллер 37, который выполняет требуемую обработку.
Для данных условий счета гамма-импульсов и обработки этих считываний для определения относительной интенсивности излучения для каждого сегмента на полном обороте эта информация должна быть соответствующим образом задействована. Микроконтроллер 37 в блоке 30 управления применяет системную методику для анализа, сравнения и принятия решений о резании по этим данным. Решение о резании посылается затем на комбайн посредством различных имеющихся средств. Если роторные валы комбайна оснащены подходящими токосъемными кольцами, то это есть простейший вариант реализации требуемого обмена информацией. Если комбайн не имеет такого оснащения, то может применяться технология высокоскоростной радиочастотной передачи данных. Дистанционный контроль работы комбайна может быть выполнен при посылке данных на комбайн.
Итак, получение конструкции детекторов подходящей формы, размеров, зоны обзора, очень компактных, но и хорошо защищенных, достаточно стойких к вибрации и ударным нагрузкам, и размещение этих детекторов на роторах горного комбайна непрерывного действия есть первый этап в получении адекватных и точных данных. Следующий важный этап заключается в обеспечении средства согласования гамма-измерений с положением на формации. Обработка данных, полученных от каждого сегмента поверхности шахты, делает затем возможным определение местоположения границ пласта и сорта руды в пласте. Окончательно могут быть применены алгоритмы для пространственного согласования данных для оптимизации движения комбайна через формацию и логические решения, полученные с помощью этих алгоритмов, могут быть направлены для управления головкой резца. Результатом является эффективное геоуправление комбайном.
Хотя изобретение рассмотрено подробно в связи с известными в настоящее время предпочтительными вариантами реализации, следует ясно понимать, что изобретение не ограничивается этими рассмотренными вариантами реализации. Конечно же изобретение может быть модифицировано с включением любого количества вариаций, изменений, замен или эквивалентного оборудования, поэтому здесь и не рассматриваемых, но которые соразмерны сущности и охвату изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛОКОННЫЕ СЦИНТИЛЛЯТОРЫ, ЧУВСТВИТЕЛЬНЫЕ К НЕЙТРОНАМ И ГАММА-ИЗЛУЧЕНИЮ | 2015 |
|
RU2678951C2 |
| МОДЕЛИРОВАНИЕ ХАРАКТЕРИСТИКИ ГАММА-ЛУЧЕВОГО КАРОТАЖНОГО ЗОНДА | 2008 |
|
RU2475784C2 |
| ГИБКИЙ ДИНАМИЧЕСКИЙ КОРПУС | 2002 |
|
RU2299452C2 |
| УЗЕЛ ДЕТЕКТОРА РАДИАЦИОННОГО ИЗЛУЧЕНИЯ | 2010 |
|
RU2510519C2 |
| СИСТЕМЫ И СПОСОБЫ С ПРИМЕНЕНИЕМ НАСТРАИВАЕМОГО ДИФФЕРЕНЦИАЛЬНОГО ГРАВИМЕТРА | 2012 |
|
RU2572642C1 |
| СПОСОБ ПРОВЕДЕНИЯ КАРОТАЖНЫХ РАБОТ В СКВАЖИНЕ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2447279C2 |
| УСТРОЙСТВО С ПОЛУСФЕРИЧЕСКОЙ ЗОНОЙ ОБЗОРА ДЛЯ ПОИСКА ИСТОЧНИКОВ ФОТОННОГО ИЗЛУЧЕНИЯ | 2019 |
|
RU2700365C1 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ РОТОРНОЙ ГОРНОПРОХОДЧЕСКОЙ МАШИНЫ | 2017 |
|
RU2764971C2 |
| ПРИБОР ДЛЯ ИССЛЕДОВАНИЯ КАЧЕСТВА ЦЕМЕНТИРОВАНИЯ ОБСАДНОЙ КОЛОННЫ СКВАЖИНЫ В ГОРНОЙ ПОРОДЕ | 2009 |
|
RU2396552C1 |
| ИЗМЕРЕНИЕ ДАВЛЕНИЯ ПЛАСТОВОГО ГАЗА В ОБСАЖЕННЫХ СКВАЖИНАХ С ИСПОЛЬЗОВАНИЕМ ИМПУЛЬСНОГО НЕЙТРОННОГО КАРОТАЖА | 2006 |
|
RU2411551C2 |
Изобретение относится к системе управления добычей для бурового комбайна. Сущность: система управления добычей содержит комбайн, имеющий, по меньшей мере, два роторных резца с лопастями и гамма-детектор на каждом из, по меньшей мере, двух вращающихся резцов для приема гамма-излучения от геологической формации. Система управления буровым комбайном предоставляет также акселерометр и скоростной гироскоп, которые согласовывают принятое гамма-излучение с положениями, по меньшей мере, двух роторных резцов, и логический блок, который использует согласованные считывания для определения необходимости перемещения резцов. Технический результат: эффективное геоуправление комбайном. 8 з.п. ф-лы, 6 ил.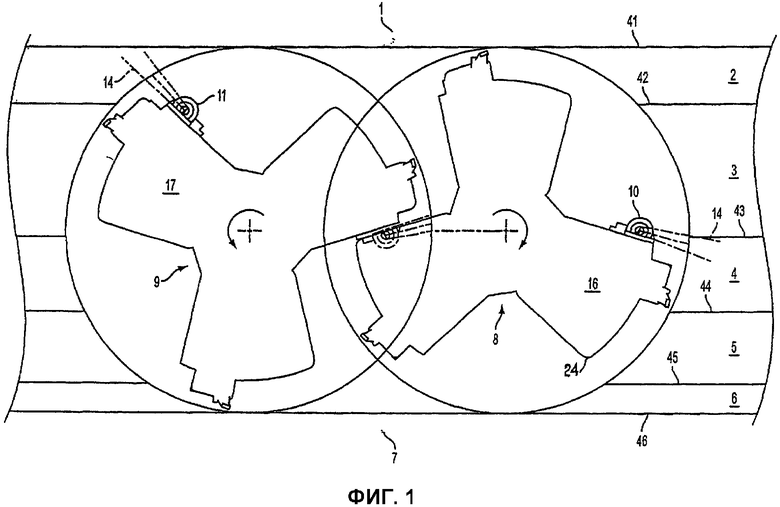
1. Система управления добычей для бурового комбайна непрерывного действия, включающего, по меньшей мере, два роторных резца, имеющих, каждый, лопасти, проходящие от него, содержащая гамма-детектор, расположенный на каждом из, по меньшей мере, двух роторных резцов для приема гамма-излучения, излучаемого разрабатываемой геологической формацией, при этом каждый гамма-детектор установлен на одной из лопастей роторного резца таким образом, что гамма-детектор имеет малую зону обзора в направлении, требуемом для идентификации границ в геологической формации и большую зону обзора в направлении, параллельном геологической формации, и систему согласования положения для согласования полученных гамма-излучений с положением одного из, по меньшей мере, роторных резцов, и логический блок, использующий согласованные считывания для определения необходимости перемещения резцов.
2. Система по п.1, в которой логический блок способен сравнивать считывания, соответствующие положениям, по меньшей мере, двух роторных резцов и определять путь перемещения, по меньшей мере, двух роторных резцов вверх и вниз для удержания комбайна выровненным с пластами минералов геологической формации.
3. Система по п.1, в которой логический блок способен передавать на комбайн сигналы, используемые для направления гидравлических цилиндров для перемещения, по меньшей мере, двух роторных резцов в направлении, требуемом для прохождения комбайном геологической формации.
4. Система по п.1, дополнительно содержащая дисплей для индикации оператору или передачи на удаленный монитор отсчитываемых гамма-импульсов в зависимости от ориентации резца.
5. Система по п.1, в которой малая зона обзора в направлении, требуемом для идентификации границ в геологической формации, определяет множество обозреваемых прилежащих сегментов, которые совместно эквивалентны периферии роторного резца, и сравнение гамма-излучений от каждого обозреваемого прилежащего сегмента обеспечивает определение границ в геологической формации логическим блоком.
6. Система по п.5, в которой множество соседних обозреваемых сегментов включает от около 75 до 100 сегментов.
7. Система по п.5, в которой логический блок способен объединять данные от обозреваемых прилежащих сегментов для расчета сорта добываемой руды.
8. Система по п.1, в которой гамма-детектор установлен на соответствующем резце таким образом, что гамма-чувствительный элемент в каждом гамма-детекторе расположен на расстоянии в пределах 11 дюймов от поверхности геологической формации, срезаемой роторным резцом.
9. Система по п.1, в которой система согласования положения содержит акселерометр и скоростной гироскоп для согласования принятого гамма-излучения с положением, по меньшей мере, двух резцов.
| WO 02075361 A2, 26.09.2002 | |||
| US 3578807 A, 18.05.1971 | |||
| US 6068394 A, 30.05.2000 | |||
| US 4166406 A, 04.09.1979. |

