ОБЛАСТЬ ТЕХНИКИ
Изобретение относится в целом к области спектроскопического анализа. Более конкретно изобретение относится к спектроскопическому анализу утечек флюидов из трубопроводов природного газа и нефти с использованием лазерного дифференциального поглощения.
УРОВЕНЬ ТЕХНИКИ
Ведение наблюдения за топографией участка хорошо известно в технике. При наблюдении за участком весьма желательно обнаруживать, не произошло ли существенное повреждение на объекте искусственного происхождения, таком как дорога, трубопровод, электросеть, или другом искусственном сооружении практической важности. При обнаружении повреждения конструкции надлежащие полномочные органы принимают решение о необходимости восстановительных мероприятий. Для этого используется наземная бригада, многократно проводящая визуальную проверку топографии участка, передвигаясь по району на транспортном средстве или пешком, чтобы обнаружить, есть ли существенное повреждение. Также с этой целью самолеты или спутники используют устройство съемки изображений, например, на устройстве с зарядовой связью (ПЗС), комплементарном металл-оксидном полупроводниковом (КМОП) устройстве, или детектор излучения, такой, как чувствительный инфракрасный приемник. Хорошо известно, что бортовые системы фотосъемки также могут использоваться для съемки изображений смежных с участком областей.
При взаимодействии электромагнитного излучения с веществом могут происходить некоторые явления, такие как рассеяние, поглощение, пропускание и отражение электромагнитного излучения. Спектральный или спектроскопический анализ включает в себя тщательное исследование, анализ и представление взаимодействий электромагнитного излучения с веществом, упорядоченным образом, как функции длины волны, частоты или времени. В ходе спектроскопического анализа различные материалы проявляют различные свойства рассеяния, поглощения, отражения и пропускания. Эти характерные свойства определяются химической и физической структурой веществ. Если совокупность этих характерных свойств определяется с заданным уровнем достоверности так, как при использовании известных тестовых объектов, то эти спектроскопические результаты могут определяться как эталонные спектральные сигнатуры или эталонные спектры.
Природный газ, типично, содержит смесь метана, этана и малые количества других газов. Газ, образуемый при разложении органического вещества, называемый далее болотным газом, содержит только метан. Весьма желательно, чтобы любой способ обнаружения природного газа позволял проводить различие между газами, выделяющимися в результате повреждения трубопровода или емкости для хранения, и выделяющимися болотными газами и, тем самым, избегать ложных тревог.
В нефтепроводах содержатся значительные концентрации летучих растворенных газовых соединений, включающих в себя метан, этан и пропан. Нефтепроводы работают под давлением; в результате утечек и сопутствующего падения давления летучие компоненты улетучиваются, что позволяет обнаруживать утечки. Электромагнитное излучение может направляться на объект исследования любым из множества средств. Обычно используются лазеры, но могут использоваться и другие средства такие, как антенны для излучения электромагнитной энергии радио и микроволнового диапазона. В дальнейшем, при описании электромагнитного излучения, направляемого на объект исследования, оно упоминается как облучатель.
При обнаружении повреждений в трубопроводах газа и нефти существует конкретная проблема, связанная с тем, что газопровод или нефтепровод обычно заглублен ниже уровня грунта. В таких случаях трудно осуществить прямую визуальную оценку каких-либо повреждений трубопровода. Когда повреждения происходят, они обнаруживаются посредством утечки содержимого трубопровода, причем просачивающееся вещество формирует характерный след или сигнал. Обычно повреждения в трубопроводах в настоящее время определяются путем периодического, связанного с высокими затратами осмотра трубопровода обслуживающим персоналом с применением некоторых средств обнаружения следовых количеств вещества, выделяющегося из трубопровода. Газы могут улетучиваться из трубопровода и мигрировать через почвенный покров на поверхность, и далее в атмосферу. Следовательно, атмосфера может контролироваться на присутствие газов, улетучившихся из трубопровода. Связь газов, обнаруженных в атмосфере, с утечкой в трубопроводе может быть прямой или косвенной. Примером прямой связи является выделение конкретных углеводородных газов в атмосферу из подповерхностных нефте- и газопроводов. Природный газ состоит из двух основных компонентов, метана и этана, с довольно постоянным количественным соотношением в смеси. Измерение обоих компонентов и подтверждение соответствующего отношения концентраций прямо устанавливает наличие утечки в трубопроводе. В этом случае связь - прямая, потому что газовые компоненты сами, хотя и в потенциально измененном составе, выделяются в атмосферу. Подобным образом могут обнаруживаться другие летучие компоненты содержимого газоносных трубопроводов, указывая на наличие утечки. Метан образуется при тепловом или биологическом разложении угля. Обнаруживаемый газ (метан) не идентичен природному ресурсу (углю), поэтому для описания такой связи используется термин «косвенный». Термин «косвенная связь» не означает, что научное обоснование этой связи не достаточно. Процесс преобразования угля в метан хорошо описан в научной литературе.
В случае трубопроводов нефти и нефтепродуктов, выделение некоторых летучих компонентов может указывать на наличие утечки флюида и, следовательно, являться косвенным доказательством повреждения трубопровода. Лазерная абсорбционная спектроскопия (ЛАС) является высокоточным средством для количественного определения молекулярных концентраций в разнообразных ситуациях, не поддающихся измерениям другими средствами, особенно средствами дистанционного зондирования. Основным преимуществом ЛАС является то, что эксперимент проводится «in situ» (на месте); это обеспечивает возможность быстрого выполнения измерений с хорошим пространственным разрешением в различных условиях окружающей среды. В экспериментах по поглощению отношение интенсивности прошедшего луча I(v,x) к интенсивности исходного луча I0(v,x=0) связано с концентрацией поглотителя по закону Байера
I(v,x)/I0(v,x=0)=exp-nxσ(v)
где σ(v) - молекулярное поперечное сечение на частоте v; x - длина пути, проходимого лазером. Для любого данного отношения сигнал/шум при измерении I(v,x)/I0(v,x=0) чувствительность измерения может быть увеличена путем увеличения длины пути. Существует ряд патентов предшествующего уровня техники, в которых раскрыто применение лазерных средств для обнаружения примесей газов в атмосфере. Некоторые из этих лазерных систем действуют в микроволновом или ультрафиолетовом диапазоне длин волн. Эти лазерные системы отличаются от заявленного изобретения, которое предусматривает работу в среднем инфракрасном диапазоне длин волн. В описанных ниже патентах лазерные системы также работают в среднем инфракрасном диапазоне длин волн при обнаружении углеводородных газов.
В патенте США №4450356 на имя Murray et al., лазерное излучение смешанных частот (CO2)-лазера используется для дистанционного обнаружения газов в атмосфере. Система лазерного излучения использует удвоение частоты и суммирование частот в кристаллах для генерации длин волн около трех микрометров. Раскрыто средство для селекции нескольких длин волн, но для среднего инфракрасного диапазона описана доставка только двух длин волн к топографической цели. CO2-лазеры не обеспечивают возможности непрерывной перестройки, и не содержат интенсивных спектральных линий, соответствующих длинам волн, совпадающим с приемлемыми спектральными линиями для метана и этана. В патенте США №4489239 на имя Grant et al. описан переносной дистанционный лазерный датчик ближнего действия для дальности 25 м, предназначенный для обнаружения утечек метана на газопроводах. Система требует использования двух гелий-неоновых (He-Ne) лазеров. Два лазера работают на двух различных длинах волн характеристики «включение-выключение» для метана, каждая из которых фиксирована. He-Ne лазеры обычно являются не перестраиваемыми и не так эффективны и надежны, как твердотельные лазеры. Аналогично, в опубликованной патентной заявке США 2003/0030001 A1 на имя Cooper et al. раскрыто использование перестраиваемого диодного лазера для обнаружения газов в атмосфере. Эта система не позволяет компенсировать в реальном масштабе времени изменения в отражательной способности фоновой области цели и не может осуществлять измерения по множеству видов газов по существу одновременно, что является принципиальным требованием для систем сканирования и дистанционного зондирования, предназначенных для обнаружения утечек в трубопроводах. В патенте США №4871916 на имя Scott описана лазерная система, которая использует неодимовый лазер для дистанционного обнаружения метана в атмосфере для определения условий приближающейся опасности или взрывоопасных горизонтов в шахтах. В этой системе используется диапазон длин волн около 1,318 мкм. Эта система только обеспечивает обнаружение метана и не позволяет компенсировать в реальном масштабе времени изменения в отражательной способности фоновой области цели. В патенте США №5157257, преуступленном Geiger, описывается система DIAL инфракрасного диапазона. Указанная система использует шесть различных когерентных лучей, образованных шестью различными импульсными лазерами на длинах волн от 2,2 до 2,4 или от 3,1 до 3,5 мкм, для обнаружения легких углеводородов. Шесть когерентных лучей полностью мультиплексированы по времени и объединены в один луч посредством селективной поляризации. Для настройки поляризации используются кварцевые кристаллы, которые легко повреждаются импульсами лазера с высокой энергией излучения. К тому же сложность этой системы препятствует ее использованию в полевых условиях, особенно в бортовых системах дистанционного зондирования. Кроме того, ширина лазерного спектра слишком велика для разрешения полос поглощения многих основных газов. В патенте США №6509566, преуступленном Wamsley et al., также описана система DIAL среднего инфракрасного диапазона, предназначенная для разведки месторождений нефти и газа. Эта система содержит Cr:LiSAF лазер с водородной ячейкой Рамана для генерации длин волн в диапазоне, пригодном для обнаружения углеводородов. Лазер использует водяное охлаждение и является непрерывно перестраиваемым на одной длине волны. Эта система не позволяет удобным образом компенсировать в реальном масштабе времени изменения в отражательной способности фоновой области цели и одновременно обнаруживать другие газы. Более того, единственная частота излучения лазера привязывается к внешнему измерителю частоты и, следовательно, подвержена дрейфу, что отрицательно влияет на электронные компоненты системы.
ПРОБЛЕМЫ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
Принимается во внимание, что трубопроводы обычно переносят нефтепродукты, нефть, природный газ, очищенные продукты переработки нефти и газа, растворы, химические вещества, рудные шламы минералов и другие флюиды или текучие вещества или смеси. Упомянутые выше лазерные системы не обеспечивают обнаружение, по существу, одновременно множества видов газов таких, как метан и этан, которые присутствуют в нефтепроводах природного газа. Они также не компенсируют изменения в отражательной способности фоновой области цели. Кроме того, лазеры, которые не являются непрерывно перестраиваемыми, не могут точно рассчитываться для обнаружения различных газовых веществ. Ложные тревоги остаются проблемой для вышеупомянутых систем, известных из предшествующего уровня техники, и их чувствительность к обнаружению множества видов газов сомнительна. Другие газовые примеси, которые появляются в атмосфере, могут также создавать помехи обнаружению природного газа с использованием этих лазерных систем, известных из предшествующего уровня техники.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на преодоление одной или более проблем, изложенных выше, посредством создания системы для дистанционного количественного обнаружения утечек флюида из трубопроводов природного газа или нефти с использованием бортовой платформы, которая содержит, по меньшей мере, один лазерный источник света для, по существу, одновременного освещения, по существу, той же самой области цели из двух и более целевых флюидов и подстилающей поверхности, при этом два и более целевых флюида характеризуются двумя или более длинами волн поглощения, причем подстилающая поверхность обнаруживается на другой длине волны, чем для любого из двух или более целевых флюидов.
Кроме того, настоящее изобретение дополнительно включает в себя средство для наведения источника освещения на основе системы позиционирования; средство для сканирования двух или более целевых флюидов в геометрической области вдоль траектории движения с использованием источника освещения; средство для обнаружения сигнала, обеспечивающее выполнение количественной обработки обнаружения двух и более целевых флюидов; и средство для управления работой системы. Средство обработки сигнала для дистанционного количественного обнаружения двух и более утечек целевых флюидов; и средство для разработки траектории движения и определения траектории движения для позиционирования бортовой платформы; а так же средство для оповещения о наличии обнаруженной утечки в трубопроводе природного газа или нефти являются важными составляющими частями настоящего изобретения.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
Настоящее изобретение имеет следующие преимущества:
- используется высокого технического уровня одномикронный полупроводниковый, оптический параметрический осциллятор и оптический параметрический усилитель с диодной накачкой;
- обеспечивается достаточная эффективность преобразования длины волны;
- обеспечивается измерение длины траектории изменения концентрации для множества целей, когда тип подстилающей поверхности (фон) изменяется;
- обеспечивается возможность непрерывной перестройки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Как показано на чертежах, компоненты Фиг.1 обозначены ссылочными позициями большими, чем 100 и меньшими, чем 200, компоненты Фиг.2 обозначены ссылочными позициями большими, чем 200 и меньшими, чем 300, и т.д.
Фиг.1 - схематичное представление системы обнаружения утечки флюида в трубопроводе, использующей перестраиваемый DIAL-лазер с тремя линиями излучения, на борту быстро движущейся бортовой платформы в соответствии с настоящим изобретением.
Фиг.2 - структурная схема известной из предшествующего уровня техники DIAL-системы обнаружения газа.
Фиг.3 - структурная схема системы обнаружения утечки флюида в трубопроводе с перестраиваемым DIAL-лазером с тремя линиями излучения в соответствии с настоящим изобретением.
Фиг.4 - приведенная для примера высокоуровневая структурная схема системы с перестраиваемым DIAL-лазером с тремя линиями излучения для обнаружения утечки флюида в трубопроводе в соответствии с настоящим изобретением.
Фиг.5 - среднеуровневая структурная схема системы обнаружения утечки флюида в трубопроводе с перестраиваемым DIAL-лазером с тремя линиями излучения в соответствии с настоящим изобретением.
Фиг.6 - среднеуровневая структурная схема системы обнаружения утечки флюида в трубопроводе с перестраиваемым DIAL-лазером с тремя линиями излучения в соответствии с настоящим изобретением, со списком компонентов каждой основной подсистемы.
Фиг.7 - структурная схема 1-микронного оптического параметрического генератора и усилителя для генерации выбранной длины волны.
Фиг.8 - структурная схема 1-микронного оптического параметрического генератора и усилителя для генерации одной из выбранных длин волн трех линий излучения.
Фиг.9 - структурная схема системы определения траектории полета в соответствии с настоящим изобретением.
Фиг.10 - структурная схема лазерной системы наведения в соответствии с настоящим изобретением.
Фиг.11 - структурная схема системы обнаружения утечки флюида в трубопроводе с перестраиваемым DIAL-лазером с тремя линиями излучения.
Для простоты понимания там, где возможно, используются одинаковые ссылочные позиции для обозначения одинаковых элементов, показанных на разных чертежах.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение предназначено для измерения газов, связанных с утечками нефти и газа из трубопроводов. Это изобретение относится к системе обнаружения утечки нефти и газа в трубопроводе и к способу обнаружения газов в атмосфере и в большей степени, но не как ограничение, обнаружения утечек в трубопроводе на основе методов зондирования с использованием лидара дифференциального поглощения (DIAL), работающего в среднем инфракрасном спектральном диапазоне от 2 до 5 мкм. В принципе могут обеспечиваться обнаружение или разведка следующих флюидов: газ, эфирное масло, парафиновая нефть, неочищенная тяжелая нефть, и опасные вещества. Концентрации газа наносятся на карту области, и карты анализируются на предмет аномалий концентрации. Газовые аномалии интерпретируются для оценки утечки в подземном трубопроводе.
При описании настоящего изобретения термин «целевые флюиды» используется для обозначения флюидов, которые связаны либо прямо, либо косвенно с утечкой в трубопроводе. Под целевыми флюидами подразумеваются либо жидкости, либо газы. Измеренные атмосферные концентрации целевых флюидов образуют основу нового инфраструктурного инструмента оценки, как описано ниже. Чтобы увязать целевые флюиды с утечкой в трубопроводе, они должны обладать некоторыми уникальными свойствами. Например, метан образуется в ряде случаев. Он может попадать в атмосферу в результате выделения из месторождений углеводородов, выделения из угольных месторождений, выделения из заболоченных территорий с активными метанпродуцирующими бактериями, выделения из газопровода с утечками и т.д. Источники метана, отличные от утечек в трубопроводе, рассматриваются как помехи окружающей среды. Помехи окружающей среды затрудняют увязывание целевых флюидов с утечкой; и будут меняться по величине и типу в зависимости от стандартных геологических факторов таких, как тип почвы, гидрология, подповерхностная структура и состав, а также в зависимости от атмосферных условий, погоды и землепользования. Уникальные газовые смеси, такие как метан/этан, являются полезными целевыми флюидами для трубопроводов природного газа. Отдельные газы или сочетания газов, имеющие уникальную связь с утечкой в трубопроводе, обеспечивают наиболее ценные сигналы, указывающие на наличие утечки.
Настоящее изобретение предусматривает использование лидара дифференциального поглощения (DIAL), который выполняет замеры на траектории движения в атмосфере. Разработан широкий набор средств обнаружения большинства примесей газов в атмосфере. Эти средства могут быть подразделены на средства, которые выполняют замеры воздуха в конкретной точке пространства, и системы дистанционного зондирования такие, как многочисленные спутниковые системы или системы надземного базирования, которые предусматривают крупномасштабные измерения концентраций газа. Существует много видов источников газа, для которых, вследствие их уникальных пространственных и временных свойств, не могут быть получены точные характеристики с использованием этих средств. Контроль выбросов из таких источников требует использование системы, которая может дистанционно измерять мельчайшие концентрации быстро и на большом расстоянии. Лидары дифференциального поглощения (DIAL) дальнего действия обычно удовлетворяют этим требованиям.
Одной особенностью настоящего изобретения является использование бортового оптического датчика перестраиваемого лидара дифференциального поглощения (DIAL) с тремя линиями излучения для дистанционного количественного обнаружения утечек в трубопроводе природного газа или нефти. Другой особенностью настоящего изобретения является выбор примесей газов, которые оптимально характеризуют утечки флюида в трубопроводе. В настоящем изобретении определяются газы, выбрасываемые в атмосферу вследствие утечек в трубопроводах, как газа, так и нефти, при этом для уверенного обнаружения утечек обоих типов выбираются метан и этан. Другая особенность настоящего изобретения заключается в оптимальном выборе молекулярного перехода характеристик оптического поглощения метана и этана в пределах средней инфракрасной области электромагнитного спектра. Характеристики поглощения метана и этана анализируются, и две разрешенных длины волны (также называемые включенными линиями) и одна неразрешенная длина волны (также называемая отключенной линией) для метана, этана и образца земной поверхности (подстилающей поверхности), соответственно, выбираются для обнаружения утечки. Длины волн включенных линий выбираются близко к пику оптического поглощения целевого газа при минимальном мешающем действии других газов. Длина волны отключенной линии выбирается около крыла функции оптического поглощения целевого газа, при минимальном мешающем действии других газов и высокой отражательной способности земной поверхности. В настоящем изобретении длины волн включенных и отключенной линии выбраны равными 3369,8, 3389 и 3429 нм для этана, метана и фона соответственно. Заметим, что эти конкретные длины волн не использовались в предшествующем уровне техники, и, как было упомянуто ранее, критерием выбора длин волн включенных линий является то, что в поглощении, как ожидается, исключительно доминируют метан и этан, а критерием выбора длины волны отключенной линии - то, что в поглощении, как ожидается, не доминируют ни метан, ни этан, ни частицы атмосферы.
Другая особенность настоящего изобретения предусматривает использование непрерывно перестраиваемого лазера. Поэтому три непрерывно перестраиваемых ND:YLF лазера были разработаны и реализованы для обнаружения примесей метана и этана и подстилающей поверхности соответственно. Настоящее изобретение также измеряет длины путей изменения концентрации целевых газов. Поэтому система с перестраиваемым DIAL-лазером с тремя линиями излучения в соответствие с настоящим изобретением измеряет длины путей концентрации двух выбранных целевых газов для каждого сканируемого пятна. Настоящее изобретение использует статистический анализ множества результатов измерений длины пути концентрации для двух целевых газов вдоль траектории полета. В заключение настоящее изобретение предусматривает вывод на экран, сохранение и передачу данных о положении, размерах и форме газовых выбросов, связанных с утечками в трубопроводе.
Согласно настоящему изобретению, как схематично показано на Фиг.1, используются летательный аппарат 110 и бортовая система 120 обнаружения утечек флюида в трубопроводе с перестраиваемым лидаром дифференциального поглощения (DIAL) с тремя линиями излучения. Также показаны посланный лазерный луч 130, газовые примеси 150, подземный трубопровод 160, область 170 утечки, пример 180 земной поверхности, трехмерный срез участка 190 с трубопроводом, областью 170 утечки и газовыми примесями, высота 140 полета летательного аппарата (~500 м), а также свободная область 105 доступа к трубопроводу. Летательный аппарат 110 летит согласно предварительно определенной оптимальной траектории полета в направлении подземного трубопровода 160, с целью обнаружения области 170 утечки, содержащей утечки в газо- или нефтепроводе. Во время полета бортовая система позиционирования, включающая в себя систему GPS (Глобальная система определения местоположения) и IMU (блок инерциальных измерений) (не показаны) обеспечивает наведение летательного аппарата к местоположению цели, где имеет место выделение газовых примесей 150. Когда летательный аппарат достигает местоположения цели, лазерное излучение 130 автоматически направляется на цель, а система сканирования сканирует пространство вокруг центра цели. Затем отраженный свет анализируется, чтобы построить двумерные отображения обнаруженных газов или изображения выбросов метана и этана в единицах длины пути и концентрации.
В системе измерений на основе лидара DIAL излучаются два лазерных импульса, по существу на одной длине волны. Один лазерный импульс выбирается с заданной длиной волны, которая поглощается газом, представляющим интерес, а другой лазерный импульс, имеющий отличающуюся длину волны, не поглощается. Энергия, отраженная назад в направлении сенсора для обеих длин волн, измеряется и объединяется, чтобы получить оценку протяженности концентрации целевого газа. Этот процесс описан ниже более подробно.
Энергия, которая отражается в направлении сенсора, описывается следующим отношением:

где ET - передаваемая энергия, ρπ - отражательная способность поверхности, CLp - произведение концентрации протяженности выброса, Cbg- фоновая концентрация газа, R - расстояние до поверхности, σ(λ) - поперечное сечение поглощения газа как функция длины волны. Здесь предполагается, что энергия ET постоянна от импульса к импульсу (поскольку любые изменения могут быть измерены и учтены), ρπ равно 0,005 и не зависит от длины волны в малом диапазоне рассматриваемых длин волн, R обычно составляет 500 м, и поперечное сечение σ(λ) не изменяется значительно вследствие изменений температуры и давления вдоль траектории. Последнее предположение было бы не справедливо для траекторий, которые измеряются на несколько километров по высоте, но оно приемлемо для полета летательного аппарата на высоте 500 м. Также следует отметить, что может оказаться необходимым повторно измерить σ(λ), если система работает в регионе, где уровень земли намного выше уровня моря.
Элементом, который зависит от длины волны, в уравнении (1) является поперечное сечение σ(λ). Многие из элементов, которые не изменяются, могут быть сокращены путем измерений на двух длинах волн и делением результатов. Пусть E1 обозначает измеренное значение энергии на одной длине волны, а E2 обозначает измеренное значение энергии на другой длине волны. Тогда

Натуральный логарифм от (2) равен:

Поперечное сечение может измеряться автономно или в режиме реального времени (используя газонаполненный фотоэлемент на борту летательного аппарата). В любом случае, поперечное сечение на каждой длине волны является известной величиной, поэтому:

Уравнение (4) описывает способ измерения, моделируемый согласно настоящему изобретению. Однако существуют дополнительные возможности обработки, так как R также может измеряться системой, и Cbg можно оценивать или измерять. Затем можно было бы получить оценку CLp. В завершенной системе, вероятно, одна только оценка CLp будет важной частью полученного соотношения, но анализ уравнения (4) достаточен, чтобы охарактеризовать эффективность обнаружения выброса.
Уравнение (4) не учитывает влияние различий в длине (Ck) атмосферной концентрации. Но уравнение (5) учитывает влияние различий в длине атмосферной концентрации, когда Ck можно оценить или измерить.

Для пояснения настоящего изобретения, на фиг.2 показана структурная схема известной системы DIAL. Лазер 220 с одной включенной линией и лазер 240 с одной отключенной линией настраиваются сигналами 275 электронного управления на две различные длины волны усилителями 210 и 230 захвата линии, длина волны включенной линии выбирается вблизи пика оптического поглощения целевого газа, а длина волны отключенной линии выбирается вблизи крыла длины волны оптического поглощения целевого газа. Лучи лазеров 220 и 240 с длинами волн включенной и отключенной линий, соответственно, объединяются на голографической решетке 250, передаются зеркалом 260 быстрой развертки через телескоп 270 и направляются и наводятся зеркалом 280 медленной развертки. Наконец, в исследуемом районе газовые примеси в атмосфере вблизи земной поверхности последовательно сканируются лазерными лучами 290. Лазерный луч 290 рассеивается и проходит через газовые примеси 295, отражается от подстилающей поверхности 282 и вновь рассеивается и проходит через газовые примеси 295. Затем отраженный свет 285 отражается зеркалом 280 медленной развертки в телескоп 270 и отклоняется расщепителем 232 луча, направляющим прошедший лазерный луч 205 на другой набор расщепителей 215 лучей для прохождения через набор фильтров 225, пропускающих только длины волн включенной и отключенной линий, после чего набор детекторов 235 оптимальным образом преобразует отраженный свет в электрический сигнал. Затем сигнал усиливается усилителем 245 и преобразуется в цифровой сигнал набором аналого-цифровых преобразователей 255. Цифровой сигнал обрабатывается и анализируется компьютером 265 для вычисления отношения отраженных сигналов включенной и отключенной линий, которое прямо пропорционально длине пути концентрации целевого газа.
В предшествующем уровне техники выбиралась и измерялась только одна сигнатурная характеристика целевых газов примесей. В противоположность этому, в настоящем изобретении для повышения надежности, чувствительности и эффективности системы обнаружения утечек в газо- и нефтепроводах используется более одной сигнатурной характеристики целевых газовых примесей. Упрощенная структурная схема соответствующей настоящему изобретению оптической сенсорной системы на перестраиваемом DIAL-лазере с тремя линиями излучения показана на Фиг.3. Лазер 320 с одной включенной линией для метана, лазер 395 с одной включенной линией для этана и лазер 385 с одной отключенной линией настраиваются сигналами 355 электронного управления на три различные длины волн усилителями 310, 365 и 375 захвата линии, соответственно; длины волн включенных линий выбираются вблизи пика характеристик оптического поглощения целевых газов, а длина волны отключенной линии выбирается вблизи крыла длины волны оптического поглощения целевого газа. Лучи лазеров 320, 395 и 385 с длинами волн двух включенных и одной отключенной линий, соответственно, объединяются на голографической решетке 340 для формирования объединенного лазерного луча 330. Объединенный лазерный луч 330 передается зеркалом 350 быстрой развертки через телескоп 302 и направляется и наводится зеркалом 304 медленной развертки для формирования лазерного луча 330. В исследуемом районе газовые примеси в атмосфере вблизи земной поверхности последовательно сканируются лазерным лучом 360. Лазерный луч 360 рассеивается и проходит через газовые примеси 308, отражается от подстилающей поверхности 309, вновь рассеивается и передается газовыми примесями 308, формируя отраженный свет 306. Отраженный свет 306, полученный из прошедшего лазерного луча 360, отражается зеркалом 304 медленной развертки в телескоп 302 и отклоняется расщепителем 331 луча, формируя отраженный свет 370. Отраженный свет 370 проходит сквозь набор расщепителей 380 лучей перед поступлением на набор фильтров 390. Фильтры 390 пропускают только две длины волны включенной линии и одну длину волны отключенной линии, прежде чем набор детекторов 305 оптимальным образом преобразует отраженный свет в электрический сигнал. Электрический сигнал усиливается усилителем 315, преобразуется в цифровой сигнал набором аналого-цифровых преобразователей 325. Цифровой сигнал обрабатывается и анализируется компьютером 335 для вычисления отношения отраженных сигналов двух включенных и отключенных линий, которое прямо пропорционально длинам пути концентрации целевых газов.
Множество источников выбранного целевого газа, например метана, и изменчивость типа отражательной способности земной поверхности увеличивают вероятность ложных тревог. Соответствующая настоящему изобретению система DIAL
на перестраиваемом лазере с тремя линиями излучения минимизирует ложные тревоги, обусловленные обнаружением множества источников целевого газа и изменчивой отражательной способностью земной поверхности.
Приведенная в качестве примера структурная схема системы показана на Фиг.4. Полученные от пользователя данные о местоположении трубопровода сначала обрабатываются, фильтруются, стандартизуются и сохраняются в базе 410 данных местоположения трубопровода. Нормализация полученных от пользователя данных о местоположении трубопровода предусматривает применение одного стандартного формата файла для полученных от пользователя данных о местоположении трубопровода. Нормализованные данные о местоположении исследуемого района загружаются в компьютерную систему 450 управления, сбора данных и анализа данных. Система 430 определения траектории полета и лазерного наведения, связанная с компьютерной системой управления, сбора данных и анализа данных, направляет летательный аппарат по заданной траектории полета и наводит лазерные пучки в заданную точку. Бортовые средства для измерения положения и движения, являющиеся частью системы 430 определения траектории полета и лазерного наведения, выполняют корректирующее воздействие для направления летательного аппарата и наведения лазера на другие точки по траектории полета. Сенсорная система 440, также связанная с компьютерной системой 450 управления, сбора данных и анализа данных, направляет лазерные лучи на просачивающиеся флюиды 420 утечек и принимает отраженный от них свет. Компьютерная система 450 управления, сбора данных и анализа данных посылает управляющие сигналы на сенсорную систему 440 и принимает сигналы от сенсорной системы 440 для контроля, сохранения и анализа данных концентраций, обусловленных утечками.
Более подробная структурная схема, соответствующая изобретению, и его основная подсистема 500 показаны на Фиг.5. Основная подсистема 500 включает в себя систему 510 интерфейса вместе с программным обеспечением графического интерфейса пользователя (ГИП) для запуска, остановки, отладки, мониторинга и управления действиями основной подсистемы 500. Компьютерная система 520 имеет высокопроизводительный процессор (например, микропроцессор Intel Pentium™ или AMD Athlon™, или IBM PowerPC 750CX), и различные аппаратные компоненты такие, как процессор для обработки сигналов и аналого-цифровые преобразователи (АЦП), наряду с одним или более интерфейсами для связи с другими компонентами основной подсистемы 500. Например, имеются связи со сканером 550, с системой 530 управления, системой 505 сбора и анализа сигналов и система 525 определения траектории полета и лазерного наведения с системой GPS. В полной основной подсистеме имеются сменные аппаратные накопители и различные мониторы для отображения условий обработки.
Система 505 сбора и анализа сигналов содержит плату обработки сигналов для обработки сигналов и программное обеспечение для накопления и анализа данных, предназначенное для измерения, записи и отображения измеренных уровней концентрации этана и метана.
Основная подсистема 500 включает в себя систему 535 летательного аппарата. Системой 535 летательного аппарата может быть летательный аппарат Cessna™ 402B или любой другой летательный аппарат, имеющий возможность полета на высоте примерно 500 м со скоростью примерно 67 м/с, имеющий на борту систему обнаружения утечек флюида в трубопроводе на перестраиваемом DIAL-лазере с тремя линиями излучения и бортовую систему 525 определения траектории полета и лазерного наведения.
Более конкретно, система 525 определения траектории полета и лазерного наведения включает в себя портативную систему GPS и блок инерциальных измерений (IMU) и соединяется с компьютерной системой 520 для постоянного обновления данных положения летательного аппарата и наведения лазерных лучей, используя лазерную систему 540 посредством системы 530 управления, в соответствии с текущим положением летательного аппарата.
База данных 515 местоположения трубопровода включает в себя программные алгоритмы для обработки, фильтрации и нормализации полученного от пользователя набора данных о местоположении трубопровода и данных местоположения в режиме реального времени от бортовых систем GPS и IMU для прогнозирования оптимальной траектории полета и обновления базы данных местоположения трубопровода с использованием карты прогнозируемой оптимальной траектории.
Система 530 управления включает в себя все электронные схемы и схемы температурного контроля для управления работой перестраиваемой лазерной системы 540 с тремя линиями излучения. Примерами могут служить прецизионные контуры управления с обратной связью для удовлетворения требований по току для каждого лазерного диода, температурные датчики, блоки настройки лазерного резонатора, которые обеспечивают синхронизацию выходных сигналов каждого Nd:YLF лазера c соответствующим лазерным источником, схемы синхронизации, которые вырабатывают синхронизирующие импульсы для синхронизации возбуждения каждого лазера, наряду с синхронизацией переключения добротности в лазерной системе 540 и синхронизацией системы 505 сбора и анализа сигналов. Соответственно, лазерная система 540 реализует лазерную передающую систему DIAL прямого обнаружения с тремя линиями излучения.
Лазерная система 540 работает в средневолновой инфракрасной спектральной области и использует три полупроводниковых Nd:YLF лазерных передатчика. Эти лазеры формируют свет на одной частоте и работают с частотой повторения импульсов 3050 Гц. Каждый лазер формирует выходную мощность около 0,68 Вт. Лазеры являются перестраиваемыми и настроены на требуемые длины волн. Таким образом, лазерная система 540 вырабатывает короткие одночастотные импульсы длительностью 10 нс на трех различных длинах волн.
Система 550 сканирования включает в себя подсистемы вращающихся клиньев быстрого сканирования и клиньев медленного сканирования с компенсатором тангажа и крена. Вращающиеся клинья быстрого сканирования обеспечивают наведение переданного лазерного света, исходящего от лазерной системы 540 передатчика к области цели. Свет, рассеянный в обратном направлении от области цели, также направляется системой 550 сканирования в систему 590 обнаружения (приемник).
Система 550 сканирования генерирует таким образом диаграмму направленности облучения с круговым вращением вокруг оптической осевой линии подсистем передатчика/приемника. Компенсатор тангажа и крена подсистемы медленного сканирования системы 550 сканирования направляет центр траектории кругового облучения на область цели.
Система 560 телескопа является оптической системой, которая также называется телескопом приемника. Основная функция системы 560 телескопа заключается в сборе света, рассеянного в обратном направлении от области цели, и фокусировании его на системе 590 обнаружения. Система 560 телескопа фокусируется на области цели, и часть отраженного света, которая падает на основное зеркало телескопа приемника, фокусируется вторичным зеркалом телескопа и коллимирующей линзой в коллимированный пучок. Высокочастотный оптический пропускающий интерфейсный фильтр с оптической полосой пропускания, которая включает в себя упомянутые три длины волны, служит для режекции широкополосного фонового света из отраженного солнечного излучения и тепловых излучений нагретых поверхностей.
Система 590 обнаружения содержит компоненты и подсистемы, необходимые для обнаружения и электронного преобразования отраженного сигнала на трех длинах волн среднего инфракрасного диапазона. Система 590 обнаружения может также определяться как приемная система. Система 590 обнаружения использует прямое детектирование мощности сигнала и использует три раздельных детектора, причем каждый детектор анализирует различные части отраженного луча для обеспечения большого динамического диапазона, обусловленного как изменениями отражательной способности земной поверхности (фона), так и ослаблением при поглощении газовыми примесями. Соответственно обнаруженные электронные сигналы усиливаются и оцифровываются.
Основная подсистема 500 предназначена для обнаружения следового количества флюидов 570. Для газа и утечек в трубопроводе такими флюидами 570 являются метан и этан. Одной из целей является выбор характеристик, связанных со следовым количеством флюидов 570, при утечках флюида в трубопроводе, чтобы обеспечить возможность надежного обнаружения возможных утечек в трубопроводе.
На обнаружение следовых количеств флюидов 570 может оказывать влияние подстилающая поверхность 580.
Подстилающая поверхность 580 определяет отражение от земной поверхности. Подстилающей поверхностью 580 могут быть кусты, почва, вода, деревья, песок и т.д. Подстилающая поверхность 580 отражает свет обратного рассеяния к системе 560 телескопа.
Монитор 545 включен в основную подсистему 500 для вывода на экран различных графических интерфейсов пользователя (ГИП), которые делают возможным мониторинг и анализ релевантных условий обработки для системы обнаружения утечек флюида в трубопроводе на DIAL-лазере с тремя линиями излучения. Компьютерная система 520 посылает управляющие сигналы в систему 530 управления и получает информацию, содержащуюся в сигнале контроля, из системы 530 управления. Компьютерная система 520 также имеет доступ к интерфейсу 510 базы данных предварительно установленной оптимальной траектории полета и к бортовой подсистеме 525 определения траектории полета и лазерного наведения на GPS и IMU для наведения лазерных лучей под управлением системы 530 управления, и определяет следующее местоположение цели, которое в свою очередь вводится в систему 535 летательного аппарата. Система 530 управления посылает электрический сигнал захвата в лазерную систему 540, а также управляет температурой всех диодных лазеров в лазерной системе 540. Лазерная система 540 генерирует три почти синхронных лазерных луча в импульсе длительностью не более 10 нс заданной длины волны для передачи к местоположению цели. Переданные лазерные лучи проходят сквозь систему 530 сканирования, атмосферу, следовое количество флюидов 570 и попадают на подстилающую поверхность 580. Отраженный сигнал от подстилающей поверхности проходит опять сквозь флюиды 570 и атмосферу, обратно в систему 560 телескопа. Отраженный свет входит в апертуру системы 560 телескопа и фокусируется на детекторах в системе 590 обнаружения. Обнаруженный аналоговый сигнал оптимальным образом оцифровывается с учетом оптимального динамического диапазона системой 590 обнаружения, и оцифрованный сигнал анализируется системой 505 сбора и анализа сигналов для оценки длины пути концентрации флюидов цели. Программный алгоритм в компьютерной системе 520 статистически анализирует оценку длины пути концентрации. Проанализированные сигналы сохраняются на жестком диске компьютерной системы, и на монитор 540 выводятся двумерные или трехмерные отображения газа.
Компоненты каждой основной подсистемы, как показано на Фиг.5, для лазера генерирующего источника #1, согласно настоящему изобретению описаны далее со ссылкой на Фиг.6. Описываемые компоненты как по отдельности, так и вместе не являются единственно возможными. Эквивалентные компоненты могут использоваться вместо показанных или предполагаются используемыми.
Согласно Фиг.6, лазерная система 640 может содержать передатчик, лазеры накачки, оптический параметрический генератор (ОПГ), оптический параметрический усилитель (ОПУ), усилитель инжекции, компьютеризированный контроллер лазерного источника и устройство захвата линии излучения. Компоненты системы 650 сканирования могут включать в себя зеркало, клинья быстрого сканирования, клинья медленного сканирования с компенсатором тангажа/крена, держатель окна/корпус.
Система 660 обнаружения может включать в себя оптический фильтр, оптические согласующие элементы, детекторы, усилители и аналого-цифровые преобразователи. Система 630 определения траектории полета и лазерного наведения может включать в себя навигационные компоненты такие, как система GPS и система IMU и широкополосную аппаратуру для обновления данных местоположения летательного аппарата и высоты.
Система 620 управления, сбора и анализа сигналов может включать в себя компоненты, которые обеспечивают управление, сбор и анализ сигналов, сбор вспомогательных данных, команд сканера, сбор навигационных данных и запись данных. Система 610 пользовательского интерфейса может иметь компоненты для взаимодействия с пользователем, с пилотом, и план полета, который включает в себя карту с целевым трубопроводом. На монитор 670 выводится ГИП, режимы обработки и скорости утечки с указанием концентрации. Контроллер 680 питания обеспечивает электрическое питание всех подсистем.
Система 620 управления, сбора и анализа сигналов (содержащая блоки 520, 530 и 505, как показано на Фиг.5) посылает управляющие электрические сигналы захвата в лазерную систему 640 и получает информацию сигналов контроля с лазерной системы 640. Система 620 управления, сбора и анализа сигналов также имеет доступ к данным предварительно определенной оптимальной траектории полета через интерфейс базы 610 данных траектории полета; и управляет бортовой подсистемой 630 определения траектории полета и лазерного наведения с использованием GPS и IMU для наведения лазерного луча посредством системы 650 сканирования. Дополнительно, система 620 управления, сбора и анализа сигналов определяет следующее местоположение цели и передает информацию о цели в систему 535 летательного аппарата (показана на Фиг.5). Система 620 управления, сбора и анализа сигналов также управляет температурой всех диодных лазеров в лазерной системе. Лазерная система 640 генерирует три почти синхронных импульсных лазерных луча (например, с длительностью не более 10 нс) на заданной длине волны и передает импульсные лазерные лучи к местоположению цели посредством системы 650 сканирования.
Переданные лазерные лучи проходят через атмосферу, флюиды и попадают на подстилающую поверхность. Отраженный сигнал от подстилающей поверхности проходит опять сквозь флюиды и атмосферу и возвращается в систему 690 телескопа. Отраженный свет входит в апертуру системы 690 телескопа и фокусируется на детекторах в системе 660 обнаружения. Обнаруженный аналоговый сигнал оцифровывается в оптимальном динамическом диапазоне, используемом системой 660 обнаружения, и полученный оцифрованный сигнал анализируется системой 620 обнаружения, сбора и анализа сигналов для оценки длины пути концентрации целевых флюидов. Программный алгоритм статистически анализирует оценку длины пути концентрации в системе 620 управления, сбора и анализа сигнала. Проанализированные сигналы сохраняются на жестком диске системы 620 управления, сбора и анализа сигналов и на монитор 670 выводятся двумерные или трехмерные отображения газа.
На Фиг.7 показана упрощенная структурная схема передатчика лазерного источника, который использует 1 µm Nd:YLF лазер, который осуществляет накачку преобразователя частоты на оптическом параметрическом генераторе (ОПГ) и оптическом параметрическом усилителе (ОПУ). Накачка ОПГ обеспечивает работу в одночастотном режиме. Как показано на Фиг.7, лазерный источник #2 (705) и лазерный источник #3 (715) генерируют лучи, которые объединяются пространственным фильтром 790 в один передаваемый луч.
Различные подходы к выбору лазерного источника рассматривались на основе эффективности источника η, представляющей собой электрооптическую эффективность без учета мощности лазерной накачки и мощности охлаждения.
Длительность короткого импульса и точная синхронизация импульсов требуют использования лазера с активной модуляцией добротности. Модуляция добротности является предпочтительной для коротких импульсов, а активное управление является предпочтительным для точной синхронизации. Не существует серийно выпускаемых источников, удовлетворяющих этим требованиям. Традиционные лазерные технологии обычно используют нелинейные оптические методы для смещения длины волны лазеров высокого технического уровня в коротковолновом инфракрасном (КВИК) или длинноволновом инфракрасном (ДВИК) диапазоне длин волн, чтобы получить длины волн средневолнового инфракрасного (СВИК) диапазона, такие как длины волн, используемые в настоящем изобретении. Примерами лазеров КВИК- и ДВИК-диапазонов, которые могут смещаться по частоте в СВИК-диапазон, являются, соответственно, полупроводниковые (Nd) лазеры и газовые (CO2) лазеры.
Согласно Фиг.7, одночастотный перестраиваемый по частоте лазерный источник на 1 µm DPSSL/ОПГ-ОПУ используется для генерации выбранной длины волны. OПГ-ОПУ 750 накачивается Nd:YLF лазером с модулируемой добротностью, работающим на длине волны 1047 нм. Nd:YLF лазер накачивается волоконно-связанным диодным лазером 710, работающим на длине волны 805 нм и возбуждаемого инжекцией непрерывной волны, для получения единственной частоты 1047 нм света от обычного источника возбуждения. OПГ-OПУ 750 является инжекционным, возбуждаемым посредством диодного лазера с внешним резонатором (ДЛВР), работающего на длине волны ~1510 нм для обеспечения одночастотного выходного излучения на длине волны 3400 нм. Комбинация подсистем Nd:YLF лазера 730 возбуждения, ДЛВР лазера 740 возбуждения, 1 µm DPSSL 710, ОПГ-ОПУ 750, показанная на Фиг.7, увеличивает эффективность преобразования длины волны путем использования двух нелинейных процессов в резонаторе ОПО. ОПУ используется для преобразования некоторого количества не потребленной энергии, генерируемой кристаллом ОПГ, в выводное излучение на длине волны 3400 нм. Как показано на Фиг.7 процесс ОПГ преобразует длину волны накачки Nd:YLF (1047 нм > 3400 нм + 1510 нм) и процесс ОПУ затем усиливает выходное излучение на 3400 нм (1510 нм > 3400 нм + 2720 нм). Это значит, что отдельный фотон накачки может сформировать два фотона на 3400 нм. Таким образом, формируется больше фотонов СВИК-диапазона, чем количество случайных фотонов накачки, в результате эффективности преобразования фотонов, превышающей 100%. Следовательно, двухэтапное преобразование приводит к более высокой полной эффективности оптических преобразований, примерно на 25% или более. Следовательно, полная эффективность системы при этом конкретном подходе составляет примерно 2.
Структурная схема отдельного лазерного источника более подробно показана на Фиг.8. Выходное излучение диодного лазера 850 накачки на 805 нм проходит по оптическому волокну, коллимируется и фокусируется в Nd:YLF-стержень 860, чтобы обеспечить усиление для лазера. Также Nd:YLF лазер 860 является лазером с модуляцией добротности и возбуждается лазером 805 возбуждения на 1047 нм. Выходное излучение лазера 860 на 1047 нм инжектируется в лазерный резонатор 870 ОПО-ОПА через тонкопленочный поляризатор. Также лазерный резонатор 870 ОПО-ОПА возбуждается ДЛВР лазером 815 возбуждения на 1510 нм. ОПО-ОПА является кольцевым резонатором с 4-мя зеркалами, содержащим 2 периодически-поляризованных кристалла ниобат лития (ППНЛ). Первый кристалл выбирается для генерации света с длиной волны 3400 нм и 1510 нм с накачкой 1047 нм, тогда как второй кристалл (должен быть другой #) выбирается для генерации света с длиной волны 3400 нм и 2700 нм с накачкой 1510 нм. Резонатор 870 резонирует на 1510 нм и возбуждается инжекцией на этой длине волны через выходной элемент связи. Длина резонатора настраивается на частоту возбуждения при помощи блока 840 с использованием метода Pound-Drever-Hall (PDH) с модуляцией радиочастот, примененной к возбуждению на 1510 нм диодного лазера. Диодные подсистемы 810 и 890 управляют температурой и током диодного лазера накачки, соответственно. Подсистема 820 управляет модуляцией добротности и возбуждением резонатора за счет действия лазера 860. Контроллер 845 управляет длиной волны 1047 нм лазера 805 возбуждения. Подсистема 855 настраивает длину резонатора лазера 860 возбуждения. Контроллер 865 лазера возбуждения управляет длиной волны 1510 нм лазера возбуждения; и электронные схемы 875 лазера возбуждения настраивают лазер возбуждения на требуемую длину волны.
Структурная диаграмма подсистемы определения траектории полета и лазерного наведения показана на Фиг.9. Как упоминалось раньше, в настоящем изобретении предусматривается измерение сигнатур следового количества примесей газа как уровня концентрации для утечек флюида в трубопроводе внутри предопределенного коридора вдоль трассы трубопровода. Чтобы выполнить эту задачу, подсистема лазерного наведения активным способом непрерывно направляет три объединенных луча согласно текущему положению летательного аппарата и желательному местоположению для измерений на земной поверхности. Быстро вращающийся круговой сканер 905 и медленно вращающийся сканер 915 наведения направляют три луча по постоянной и круговой диаграмме направленности согласно текущему местоположению летательного аппарата и требуемому покрытию коридора. Идеальная планируемая траектория полета будет вырабатываться для оптимального покрытия земной поверхности вдоль траектории полета. Система 920 GPS и/или IMU опрашивается с частотой 100 Гц модулем 930 обновления данных местоположения и высоты для определения текущего местоположения летательного аппарата и высоты. На основе текущего положения, ближайшая точка проекции идеальной траектории полета будет определяться вместе со связанным с ней местоположением на земной поверхности. Круговая диаграмма направленности направляется в это местоположение на земной поверхности с учетом текущей высоты. Информация о текущем местоположении используется компьютерной системой 940 сбора данных и управления для передачи на контроллер/привод сканера 990 для управления медленно вращающимся сканером 915 наведения на область цели и вывода информации на дисплей 950 данных пилота. Контроллер/привод сканера 980 и контроллер/привод сканера 990 обеспечивают наведение лазерного луча в местоположение цели на земной поверхности. Контроллер/привод сканера 980 выдает команду 960, относящуюся к сканированию, на каждый импульс сигнала времени/цикл сканирования с частотой 20-40 Гц в компьютерную систему 940 сбора данных и управления.
Алгоритм программного обеспечения подсистемы базы данных местоположения трубопровода показан на Фиг.10. Для стабильного управления наведением необходима однозначно определенная информация о местоположении наведения в каждый момент в течение полета.
Из-за того, что трубопровод может быть проложен по нерегулярной траектории, которая не может точно отслеживаться летательным аппаратом, могут иметь место неоднозначности, связанные с наведением на цель. Следовательно, первоначально используются предполетные этапы 1010 ввода информации о местоположении трубопровода и 1030 ввода информации идеальной траектории полета для вычислений таблицы однозначно определенного соответствия на этапе 1020. Стартовый этап 1040 обозначает начало полета летательного аппарата, на предварительно определенной высоте, к местоположению цели. Текущие данные местоположения летательного аппарата измеряются на этапе 1050 бортовыми системами GPS и IMU, с использованием местоположения цели. Определение ближайших значений широты, долготы, высоты относительно идеальной траектории полета осуществляется на этапе 1070. Нахождение однозначно определенной соответствующей точки на земной поверхности осуществляется затем на этапе 1090. После этого на этапе 1005 вычисляется требуемый угол оптического клина для наведения на точку на земной поверхности, который выдается пилоту на этапе 1080 определения информации коррекции курса для наведения сканера, чтобы направить три луча в ближайшую точку цели на земной поверхности на этапе 1060.
Схема разработанной системы обнаружения утечек в газпроводе на DIAL-лазере с тремя линиями излучения с более подробным представлением подсистемы передатчика и приемника (приемопередатчика) показана на Фиг.11. Лучи трех лазерных источников для длин волн выключенной и двух включенных линий (1110, 1120, 1130 соответственно) сначала разделяются тремя расщепителями 1140 луча для контроля их мощности с помощью набора измерителей 1170 мощности, а потом три луча лазерных источников объединяются на голографической решетке 1155 для получения коллинеарных лучей. Коллинеарные лучи 1112 направляются на решетку 1114 объединения лучей для обеспечения фиксированной конечной апертуры лазерного луча. Таким образом, любые смещения, которые могут иметь место при юстировке лазеров будут выявляться по легко распознаваемым рассогласованиям энергии передаваемого импульса, но не будут оказывать влияние на калибровку измерений длины газовой концентрации. Луч источника, содержащий множество длин волн затем вводится в набор зеркал 1116 для управления оптическим путем. Отраженный от настраиваемых оптических элементов оптический луч направляется на зеркало 1118 быстрого сканирования с гальванометрическим приводом и излучается для облучения земной поверхности через зеркало 1122 медленного сканирования с большой апертурой, которое также используется для компенсации в полосе обзора сканера ошибок, вызванных креном и отклонениями от траектории полета летательного аппарата. Так как зеркало 1118 быстрого сканирования с гальванометрическим приводом отклоняется в пределах полного угла 25 градусов, луч источника отклоняется по дуге 50 градусов на входе телескопа 1108. Телескоп 1108 обеспечивает сканирование в полном угле 5 градусов передаваемого луча и формирует развертку 1126 полосы обзора земной поверхности шириной 35 м в виде пятна 1132 лазерной подсветки на земной поверхности (дополнительная угловая ширина предусмотрена для компенсации угла сноса летательного аппарата). Свет, рассеянный от приемного подсвеченного пятна 1128, входит в полную апертуру телескопа через зеркало медленного сканирования с коррекцией. Зеркало 1118 быстрого сканирования с гальванометрическим приводом также отражает принимаемый свет в выходной зрачок. Тем самым, зеркало 1118 быстрого сканирования с гальванометрическим приводом сдвигает поле зрения центрального угла приемника (что эквивалентно смещению приемного подсвеченного пятна 1128 на земной поверхности) синхронно с оптической центральной осью передаваемого луча. Принимаемый свет затем проходит через настраиваемый расщепитель 1111 луча и узкополосный интерференционный фильтр 1106, и отфильтрованный свет 1104 поступает на детектор 1102 сигнала, на усилитель 1146; и усиленный световой сигнал 1180 преобразуется в цифровую форму посредством АЦП 1146. Для контроля стабильности трех отслеживаемых длин волн, часть лазерного луча 1150 от лазерного источника 1130 включенной линии метана проходит в подсистемы 1160. Пропускающие фильтры 1165 спектральной линии на газовой ячейке пропускают только выбранные лазерные линии, затем набор детекторов 1185 преобразует лазерный свет в аналоговые электронные сигналы перед пропусканием этих сигналов через набор измерителей 1175 мощности (измерителей энергии) для контроля лазерной мощности. Затем сигнал измеренной лазерной мощности проходит через набор низкоскоростных АЦП 1195, и выходной сигнал этих АЦП 1195 считывается компьютерной системой 1148 управления, сбора данных и анализа. Подсистема 1144 электронного контроллера сканера управляет зеркалом 1118 быстрого сканирования и зеркалом 1122 медленного сканирования. База 1142 данных местоположения трубопровода, компьютерная система 1148 управления, сбора данных и анализа и подсистема 1152 определения траектории полета и лазерного наведения, показанные на Фиг.11, описаны выше.
Настоящее изобретение может быть адаптировано для обнаружения множества компонентов углеводородных газов посредством изменения длин волн сенсора на DIAL-лазере с тремя линиями излучения.
Изобретение описано со ссылкой на один или более вариантов осуществления. Однако понятно, что специалисты в данной области техники смогут вносить изменения и модификации без отклонения от объема изобретения. Настоящее изобретение предназначается для обнаружения утечек в газо- и нефтепроводах, однако, специалистам в данной области техники должно быть понятно, что настоящее изобретение может применяться для обнаружения опасных веществ или других материалов, представляющих интерес. Кроме того, понятно, что способ может предпочтительным образом использоваться для разведки нефти/газа и других природных ресурсов, представляющих интерес
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
105 Свободная область доступа
110 Летательный аппарат
120 Бортовая система обнаружения утечек флюида в трубопроводе на перестраиваемом лазере с тремя линиями излучения
130 Посланный лазерный луч
140 Высота полета
150 Газовые примеси
160 Подземный трубопровод
170 Область утечки
180 Пример земной поверхности: подстилающая поверхность
190 Трехмерный срез участка
205 Часть объединенного лазерного луча
210 Усилитель захвата линии
215 Расщепитель луча
220 Лазер с одной включенной линией
225 Фильтр
230 Усилитель захвата линии
232 Расщепитель луча
235 Детектор
240 Лазер с одной отключенной линией
245 Усилитель
250 Голографическая решетка
255 Аналого-цифровой преобразователь
260 Зеркало быстрой развертки
265 Компьютерная система управления, сбора данных и анализа
270 Телескоп
275 Сигналы электронного управления
280 Зеркало медленной развертки
282 Пример земной поверхности: подстилающая поверхность
285 Отраженный свет
290 Посланный лазерный луч
295 Газовые примеси
370 Часть объединенного лазерного луча
310 Усилитель захвата линии
331 Расщепитель луча
390 Фильтр
320 Лазер с включенной линией метана
395 Лазер с включенной линией этана
380 Расщепитель луча
305 Детектор
375 Усилитель захвата линии
385 Лазер с отключенной линией
315 Усилитель
325 Аналого-цифровой преобразователь
340 Голографическая решетка
350 Зеркало быстрой развертки
335 Компьютерная система контроля, сбора данных и анализа
302 Телескоп
355 Сигналы электронного управления
304 Зеркало медленной развертки
309 Пример земной поверхности: подстилающая поверхность
306 Отраженный свет
360 Посланный лазерный луч
308 Газовые примеси
410 База данных местоположения трубопровода
420 Просачивающиеся флюиды утечек
430 Система определения траектории полета и лазерного наведения
440 Сенсорная система
450 Компьютерная система управления, сбора данных и анализа
460 Монитор
510 Система интерфейса
520 Компьютерная система
530 Система управления
540 Лазерная система
550 Система сканирования
560 Система телескопа
570 Следовое количество флюидов
580 Подстилающая поверхность
590 Система обнаружения
505 Система сбора и анализа сигнала
515 База данных местоположения трубопровода
525 Система определения траектории полета и лазерного наведения
535 Система летательного аппарата
610 Система интерфейса
620 Система управления, сбора и анализа сигнала
630 Система определения траектории полета и лазерного наведения
640 Лазерная система
650 Система сканирования
660 Система обнаружения
670 Монитор
680 Преобразователи управления питающей мощностью
690 Система телескопа
705 Лазерный источник #2
715 Лазерный источник #3
710 Волоконно-связанный диодный лазер
720 Nd:YLF лазер с модуляцией добротности с диодной накачкой
730 Nd:YLF лазер возбуждения
740 ДЛВР лазер возбуждения
750 Оптический параметрический генератор (ОПГ) - оптический параметрический усилитель (ОПУ)
760 Расщепитель луча
770 Газовая ячейка сравнения
780 Телескоп
790 Голографическая решетка/пространственный фильтр
810 Диодный контроллер температуры
820 Электрооптический контроллер модуляции добротности
830 Температурная стабилизация
840 Блок настройки длины резонатора ОПГ на лазерное возбуждение
850 Диодный лазер 805 нм
860 Возбуждаемый Nd:YLF лазер с модуляцией добротности
870 Инжекционно возбуждаемый ОПУ-ОПА
880 Пространственный фильтр/луч - объединитель для объединения трех сформированных лазерных лучей в один передаваемый луч
890 Диодный контроллер тока
805 Meteor Nd:YLF лазер возбуждения
815 ДЛВР лазер возбуждения ОПУ
835 Эталонная ячейка сравнения
845 Контроллер Meteor Nd:YLF лазера
855 Подсистема настройки длины Nd:YLF резонатора на лазерное возбуждения
865 Контроллер лазера возбуждения
920 Система GPS/IMU
930 Обновление данных местоположения и высоты
940 Компьютерная система сбора данных и управления
950 Дисплей данных пилота
960 Сигнал обновления данных быстрого сканера
970 Сигнал обновления данных медленного сканера
905 Быстро вращающийся сканер
915 Медленно вращающийся сканер
980 Контроллер/привод быстровращающегося сканера
990 Контроллер/привод медленно вращающегося сканера
1010 Карта с координатами трубопровода из съемки
1020 Таблица соответствия (LUT)
1030 Данные идеальной траектории полета
1040 Начало вычисления местоположения цели и траектории
1050 Считывание текущих данных (широты, долготы, крена, тангажа и высоты)
1060 Наведение сканера (лазерное наведение)
1070 Ближайшая точка LUT
1080 Информация коррекции курса для пилота
1090 Координата соответствующей точки на земной поверхности в LUT
1005 Вычисление угла наведения
1105 Часть объединенного лазерного луча
1110 Лазерный источник света с длиной волны 3389 нм с отключенной линией
1120 Лазерный источник света с длиной волны 3336,8 нм с включенной линией этана
1120 Лазерный источник света с длиной волны 3429 нм с включенной линией метана
1140 Расщепитель луча
1155 Голографическая решетка
1170 Измеритель мощности
1112 Объединенные лазерные лучи
1114 Расширитель луча
1116 Управляющее зеркало
1118 Двухклиновой сканер быстрого конического сканирования
1122 Двухклиновой сканер наведения с коническим сканированием
1124 Свет, отраженный от земной поверхности (отраженный свет)
1126 Развертка полосы обзора земной поверхности
1128 Приемное подсвеченное пятно
1132 Пятно лазерной подсветки
1108 Двойной Kirkham-телескоп
1111 Направляющее зеркало
1106 Узкополосный интерференционный фильтр
1104 Отфильтрованный свет
1102 Детектор
1190 Усилитель
1180 Усиленный сигнал
1146 АЦП
1160 Подсистема измерений передаваемой лазерной энергии
1165 Эталонная газовая ячейка
1185 Детекторы
1175 Переданная энергия
1195 Низкоскоростной АЦП
1142 База данных местоположения трубопровода
1144 Приводы сканеров и кодеры положения
1148 Компьютерная система управления, сбора данных и анализа
1152 Система определения траектории полета и лазерного наведения
1154 Передачи сигналов захвата лазерных линий
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ СИСТЕМА С НАСТРОЙКОЙ НА МНОЖЕСТВЕННЫЕ ЛИНИИ И СПОСОБ РАБОТЫ ЛАЗЕРНОЙ СИСТЕМЫ | 2006 |
|
RU2411503C2 |
| Способ дистанционного поиска индикаторных веществ проявлений нефтегазовых углеводородов | 2016 |
|
RU2634488C1 |
| Способ и устройство для автономного дистанционного определения концентрации атмосферных газовых составляющих | 2020 |
|
RU2736178C1 |
| Способ дистанционного измерения концентрации газов в атмосфере | 2017 |
|
RU2679455C1 |
| АВИАЦИОННЫЙ ЛАЗЕРНЫЙ ГАЗОАНАЛИЗАТОР ДЛЯ ОБНАРУЖЕНИЯ УТЕЧЕК ИЗ ТРУБОПРОВОДОВ | 1995 |
|
RU2086959C1 |
| ЛИДАР ДИФФЕРЕНЦИАЛЬНОГО ПОГЛОЩЕНИЯ НА МОБИЛЬНОМ НОСИТЕЛЕ | 2013 |
|
RU2567469C2 |
| МОБИЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ СКОПЛЕНИЙ ГАЗООБРАЗНОГО МЕТАНА | 2004 |
|
RU2333473C2 |
| АВИАЦИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ УТЕЧЕК ГАЗА ИЗ ТРУБОПРОВОДОВ | 1995 |
|
RU2091759C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ УТЕЧЕК НЕФТИ ИЗ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 1994 |
|
RU2073816C1 |
| ПАНОРАМНЫЙ ГАЗОАНАЛИЗАТОР | 1994 |
|
RU2115109C1 |
Изобретение относится к спектроскопическому анализу утечек флюида из трубопроводов природного газа или нефти. Система для дистанционного количественного обнаружения утечек флюида с использованием бортовой платформы содержит, по меньшей мере, один лазерный источник света для одновременного облучения двух или более целевых флюидов и подстилающей поверхности, которые характеризуются двумя или более длинами волн поглощения, причем подстилающей поверхности соответствует длина волны, отличающаяся от каждого из целевых флюидов. Источник освещения наводится на основе системы позиционирования в геометрической области вдоль траектории полета при сканировании для обнаружения двух или более целевых флюидов с использованием источников света. Детектор сигнала обнаруживает два или более флюида, используя количественную обработку сигнала. Система также содержит контроллер, средство отработки и определения траектории полета для позиционирования бортовой платформы летательного аппарата и коммуникационное устройство для оповещения о наличии утечки в трубопроводе. Изобретение позволяет повысить чувствительность обнаружения утечек. 6 н. и 9 з.п. ф-лы, 11 ил.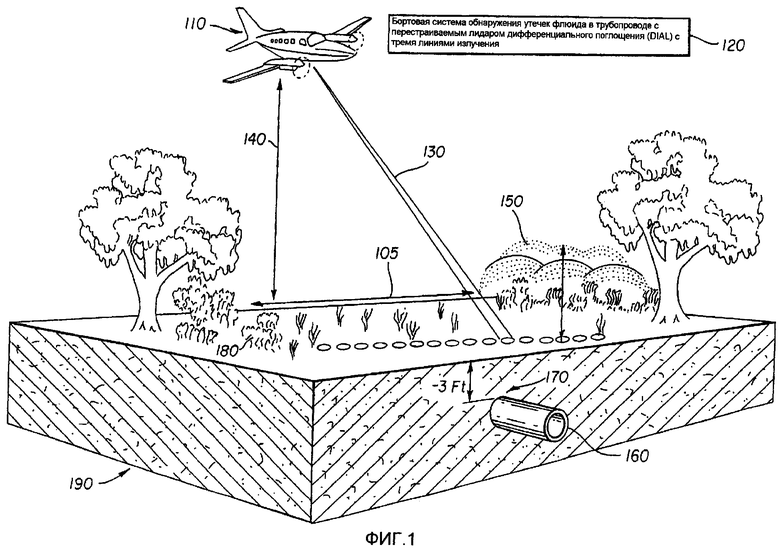
1. Система для дистанционного обнаружения утечек флюида в трубопроводе природного газа или нефти с использованием бортовой платформы, содержащая
a) по меньшей мере, два лазерных источника света для облучения, по существу, области цели из одного или более целевых флюидов и подстилающей поверхности, причем один или более целевых флюидов поглощает одну или более длину волны поглощения включенной линии и не поглощает длину волны поглощения отключенной линии,
b) средство для генерации и изменения для каждого из источников света выбранной длины волны, соответствующей каждому из одного или более целевых флюидов и подстилающей поверхности;
c) средство наведения лазерных источников света на основе системы позиционирования;
d) средство для сканирования лазерных источников света в геометрической области вдоль траектории полета;
e) средство для обнаружения одного или более целевых флюидов;
f) средство для разработки траектории полета и определения траектории полета для позиционирования бортовой платформы; и
g) средство для оповещения о наличии обнаруженной утечки в трубопроводе природного газа или нефти; и
средство для измерения длины пути концентрации одного или более целевых флюидов с использованием отношения между (1) отраженным сигналом на длине волны поглощения отключенной линии и (2) отраженным сигналом на длине волны поглощения включенной линии.
2. Система по п.1, в которой один или более целевых флюидов являются углеводородными газами.
3. Система по п.2, в которой углеводородными газами являются метан, этан или совокупности метана и этана.
4. Способ дистанционного обнаружения утечек флюида в трубопроводе природного газа или нефти с использованием бортовой платформы, содержащий
a) облучение области цели из одного или более целевых флюидов и подстилающей поверхности, по меньшей мере, двумя лазерными источниками света, причем один или более целевых флюидов поглощает одну или более длину волны поглощения включенной линии и не поглощает длину волны поглощения отключенной линии,
b) генерацию и изменение для каждого из источников света выбранной длины волны, соответствующей одному или более целевым флюидам;
c) наведение источников света на основе системы позиционирования;
d) сканирование геометрической области вдоль траектории полета с использованием источников света;
e) обнаружение одного или более целевых флюидов с использованием количественной обработки сигнала;
f) позиционирование бортовой платформы с использованием средства разработки траектории полета и определения траектории полета; и
g) оповещение о наличии обнаруженной утечки в трубопроводе природного газа или нефти, и
измерение длины пути концентрации одного или более целевых флюидов с использованием отношения между (1) отраженным сигналом на длине волны поглощения отключенной линии и (2) отраженным сигналом на длине волны поглощения включенной линии.
5. Способ по п.4, в котором один или более целевых флюидов являются углеводородными газами.
6. Способ по п.5, в котором углеводородными газами являются метан, этан или совокупности метана и этана.
7. Система для дистанционного обнаружения утечек флюида в трубопроводе природного газа или нефти с использованием бортовой платформы, содержащая
a) два или более лазерных источника света для одновременного облучения области цели из одного или более целевых флюидов и подстилающей поверхности;
b) средство для выбора одной или более длин волн, соответствующих волнам поглощения одного или более целевых флюидов, причем подстилающей поверхности соответствует другая длина волны, отличающаяся от длины волны для каждого из одного или более целевых флюидов;
c) средство для генерации и изменения для каждого из источников света выбранной длины волны, соответствующей одному или более целевым флюидам;
d) средство для наведения источников света на основе системы позиционирования;
e) средство для сканирования геометрической области вдоль траектории полета с использованием источников света;
f) средство для обнаружения сигнала и измерения характеристик одного или более целевых флюидов;
g) средство для обработки сигнала для дистанционной количественной обработки одного или более целевых флюидов;
h) средство для разработки траектории полета и определения траектории полета для позиционирования бортовой платформы; и
i) средство для оповещения о наличии обнаруженной утечки в трубопроводе природного газа или нефти, и
j) средство для измерения длины пути концентрации одного или более целевых флюидов с использованием отношения между (1) отраженным сигналом на длине волны поглощения отключенной линии и (2) отраженным сигналом на длине волны поглощения включенной линии.
8. Система по п.7, содержащая контроллер для отдельного управления интенсивностью каждого из источников света.
9. Система по п.7, в которой один или более целевых флюидов являются углеводородными газами.
10. Система по п.9, в которой углеводородными газами являются метан, этан или совокупности метана и этана.
11. Система для дистанционного количественного обнаружения в реальном времени флюидов с использованием бортовой платформы, содержащая
a) по меньшей мере, два лазерных источника света для почти одновременного освещения той же самой области цели из одного или более целевых флюидов и подстилающей поверхности, причем один или более целевых флюидов характеризуются одной или более длинами волн поглощения, а подстилающей поверхности соответствует другая длина волны, отличающаяся от длины волны каждого из одного или более целевых флюидов;
b) средство для генерации и динамического изменения в реальном времени для каждого из источников света выбранной длины волны, соответствующей одному или более целевым флюидам в диапазоне длин волн;
c) средство для позиционирования источников света на основе системы позиционирования;
d) средство для сканирования одного или более целевых флюидов в геометрической области вдоль траектории полета с использованием источников света;
e) средство для обнаружения сигнала в реальном времени, обеспечивающее количественную обработку обнаружения одного или более целевых флюидов;
f) средство обработки сигнала в реальном времени для дистанционной количественной обработки обнаружения одного или более целевых флюидов;
g) средство для разработки траектории полета и определения траектории полета для позиционирования бортовой платформы;
h) средство для оповещения о наличии обнаруженных флюидов, и
j) средство для измерения длины пути концентрации одного или более целевых флюидов с использованием отношения между (1) отраженным сигналом на длине волны поглощения отключенной линии и (2) отраженным сигналом на длине волны поглощения включенной линии.
12. Система по п.11, выполненная с возможностью настройки для обнаружения углеводородных газов.
13. Способ дистанционного количественного обнаружения флюидов с использованием бортовой платформы, содержащий
a) по существу одновременное освещение одной и той же области цели из одного или более целевых флюидов и подстилающей поверхности, по меньшей мере, двумя лазерными источниками света, причем один или более целевых флюидов характеризуются одной или более длинами волн поглощения, причем подстилающей поверхности соответствует другая длина волны, отличающаяся от длины волны каждого из одного или более целевых флюидов;
b) наведение источников света относительно системы позиционирования;
c) сканирование для обнаружения одного или более целевых флюидов в геометрической области вдоль траектории полета с использованием источников света;
d) обнаружение одного или более целевых флюидов в реальном времени с использованием количественной обработки сигнала в реальном времени;
e) генерацию и динамическое изменение в реальном времени для каждого из источников света выбранной длины волны, соответствующей одному или более целевым флюидам в диапазоне длин волн;
f) позиционирование бортовой платформы с использованием средства разработки траектории полета и определения траектории полета;
g) оповещение о наличии обнаруженного флюида и
h) измерение длины пути концентрации одного или более целевых флюидов с использованием отношения между (1) отраженным сигналом на длине волны поглощения отключенной линии и (2) отраженным сигналом на длине волны поглощения включенной линии.
14. Способ по п.13, дополнительно содержащий этап настройки источника облучения для обнаружения углеводородных газов.
15. Способ дистанционного количественного обнаружения флюидов с использованием бортовой платформы, содержащий
a) по существу одновременное облучение одной и той же области цели из одного или более целевых флюидов и подстилающей поверхности, по меньшей мере, двумя лазерными источниками света в качестве источника облучения, причем один или более целевых флюидов характеризуются одной или более длинами волн поглощения, причем подстилающей поверхности соответствует другая длина волны, отличающаяся от длины волн каждого из одного или более целевых флюидов;
b) наведение источников света относительно системы позиционирования;
c) сканирование для обнаружения одного или более целевых флюидов в геометрической области вдоль траектории полета с использованием источников света;
d) прием дополнительной информации о цели от источника;
e) обнаружение одного или более целевых флюидов в реальном времени с использованием количественной обработки сигнала в реальном времени;
f) генерацию и динамическое изменение в реальном времени для каждого из источников света, на основе дополнительной информации о цели, выбранной длины волны, соответствующей одному или более целевым флюидам в диапазоне длин волн;
g) позиционирование бортовой платформы с использованием средства разработки траектории полета и определения траектории полета; и
h) оповещение о наличии обнаруженного флюида и
измерение длины пути концентрации одного или более целевых флюидов с использованием отношения между (1) отраженным сигналом на длине волны поглощения отключенной линии и (2) отраженным сигналом на длине волны поглощения включенной линии.
| АВИАЦИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ УТЕЧЕК ГАЗА ИЗ ТРУБОПРОВОДОВ | 1995 |
|
RU2091759C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| Инструмен для прессования труб | 1974 |
|
SU489546A1 |
| US 6509566 B1, 21.01.2003 | |||
| US 4489239 A, 18.12.1984 | |||
| US 4450356 A, 22.05.1984. | |||

