Изобретение относится к области диагностической техники и может быть использовано для систематического дистанционного контроля состояния магистральных газопроводов и хранилищ, а именно для раннего обнаружения нарушений герметичности, повреждений и утечек в газопроводе, за счет обеспечения лучших условий выполнения мониторинга, повышения оперативности и достоверности измеренных параметров состояния газовых трубопроводов с помощью диагностической аппаратуры, установленной на носитель - дистанционно-пилотируемый летательный аппарат (ДПЛА).
Известны [1] ДПЛА модели "Эксперт", "Альбатрос" для экологического контроля. (Журнал "Крылья России", 98 г. (1), г. Москва), однако ими не выполняется задача выявления разрушений катодной защиты, утечек газа на ранних этапах, повреждений магистральных газопроводов.
Известен беспилотный летательный аппарат, содержащий аэродинамические поверхности, несущую конструкцию, двигатель, аппаратуру дистанционного управления, полезную нагрузку - телекамеру, ИК-систему и лазерный дальномер-указатель.
Однако его назначением является поиск и обнаружение военной техники [2]. "Fligt Int" 1990 г. - 137, 4201, с. 15 "Беспилотный самолет с новым крылом и оперением".
Известны оптикоэлектронная аппаратура видимого и ИК-диапазонов излучений, газоанализаторы, применяемые для непосредственного измерения в среде газа, и лучевые газоанализаторы для дистанционного обнаружения экологически опасных газов [3] . Патент РФ 2158423, MПК 7 G 01 N 21/61, 2000 г. "Способ дистанционного обнаружения экологически опасных газов", а также известен "Способ обнаружения утечек природного газа из трубопроводов", Патент РФ 20171383 [4].
Для диагностики повреждений газопроводов в месте разрушения измеряют величину концентрации транспортируемого газа в приземном слое.
Однако магистральные газопроводы отличаются большой протяженностью и зачастую затрудненным доступом к ним, и непосредственное исследование не эффективно.
Известна заявка ЕПВ (ЕР) 0052053, МПК G 01 V 3/16, V 3/165, патент США 204940, выданный на "Способ и устройство для аэроразведки катодной защиты подземных трубопроводов" [5], в которой используют магнитометрическую систему, содержащую измеритель магнитной индукции (датчики) пассивного соленоидного типа, усилители, цифровой фильтр, вычислитель.
Магнитометрическую систему размещают на борту вертолета и используют для контроля тока, протекающего по трубопроводу. На борту вертолета установлен минимум один магнитометр, выпускаемый на троссовой подвеске, длиной до 50 м, в момент измерений над подземным трубопроводом.
После детектирования магнитного поля, создаваемого протекающим по трубопроводу постоянным током, посторонние сигналы, не относящиеся к магнитному полю трубопровода, отфильтровывают, и определяют линейное положение, занимаемое магнитометром по отношению к трубопроводу в процессе полета.
Величину магнитного поля регистрируют в соответствии с линейным положением магнитометра по отношению к трубопроводу.
Однако установка магнитометрических систем на вертолет/самолет приводит к тому, что эти системы работают в условиях сильных электромагнитных полей, создаваемых конструкцией и работой устройств самолета, вертолета, и дополнительных эксплуатационных трудностях.
Известен патент РФ 2091759, 95, [6], выданный на "Авиационное устройство для обнаружения утечек газа из трубопроводов", содержащий носитель - вертолет и диагностическую аппаратуру - газоанализатор и тепловизор, включающие два лазера, блок контроля интенсивности излучения, усилитель-преобразователь, блок формирования времени задержки, вычислитель с блоком буферной и долговременной памяти, дисплей. В устройство включены приемная оптическая система, фотоприемное устройство, включено тепловизионное устройство, содержащее блок формирования температурного контраста земной поверхности вблизи трубы, блок формирования видимого изображения, блок визуализации с выводом на дисплей. В устройство включены блоки, позволяющие управлять режимами работ, производить перестройку длины волны, интенсивности излучений.
При этом тепловизионное устройство фиксирует распределение контрастов энергетической яркости элементов исследуемых объектов. Газоанализатор работает по методу дифференциального поглощения излучения лазеров с отражением от земли. Происходит измерение величины поглощения излучения He-Ne-лазеров с длиной волны излучения λ1 и λ2. Излучение λ1 поглощается λ1=3,3922 мкм метаном, а λ2=3,3919 мкм не поглощается. Излучения отражаются от Земли на борт ЛА и регистрируются.
Однако данная система не обеспечивает точности, достоверности результатов измерений из-за большой высоты полета носителя, отсутствия аппаратуры для исследования нарушений герметичности и определения магнитного поля трубопровода и уменьшает безопасность эксплуатации при снижении вертолета над трассой.
Задачей изобретения является создание такого автоматического беспилотного диагностического комплекса, который позволит обнаружить нарушения герметичности, повреждения и утечки в газопроводе за счет снижения высоты измерений ≥50 м при мониторинге магистральных трубопроводов, увеличения точности измерений и точности координат определения утечек при дистанционном управлении летательным аппаратом.
Заявленный автоматический беспилотный диагностический комплекс включает дистанционно-пилотируемый летательный аппарат (ДПЛА) - носитель диагностической системы. Аэродинамическая схема включает моноплан, двухбалочное хвостовое оперение, двухцилиндровый двухтактный поршневой двигатель с трехлопастным толкающим воздушным винтом. Автоматическая система управления полетом ДПЛА с блоком управления бортовыми системами состоит из навигационной системы, системы автоматического дистанционного управления. Навигационная система включает инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, систему воздушно-скоростных сигналов, малогабаритный радиовысотомер малых высот, автоматическая система дистанционного управления включает систему командного радиоуправления, логический блок, приемную аппаратуру командного радиоуправления, обзорную телевизионную систему.
В комплекс включены радиоретранслятор, радиотелеметрическая система, система автоконтроля работы бортовых систем, система обеспечения посадки ДПЛА по-самолетному, содержащая парашютную систему, трехколесное шасси с устройством торможения основных колес, мобильный наземный пункт управления с устройствами связи и контроля.
Согласно изобретению в комплекс введен вычислитель действительных координат, связанный с навигационной системой, подключенный к выходам ИНС и приемной аппаратуры СНС. В комплекс также введена система диагностики состояния магистральных трубопроводов и блок управления системой диагностики.
Вычислитель действительных координат и первый вход-выход блока управления диагностической системой подключены к блоку управления бортовыми системами, второй вход-выход блока управления диагностической системой подключен к системе команд радиоуправления, третий вход-выход связан с системой диагностики состояния магистральных газовых трубопроводов.
Таким образом, совместное использование ИНС и СНС, вычислителя действительных координат ЛА обеспечивает оценку и компенсацию в процессе обработки погрешностей ИНС, увеличение точности определения координат ДПЛА, скорости полета. Это позволило определять местоположение газовых утечек или разрушении обследуемого газопровода при дистанционном управлении.
Введение диагностической системы на ДПЛА с блоком управления позволит обеспечить автоматический, дистанционный мониторинг газопровода - обнаружение нарушения герметичности, утечек газа, разрушений газопровода.
Сущность изобретения поясняется на чертеже, где приведена принципиальная блок-схема АБДК. На чертеже изображены:
1. Система автоматического управления
2. Космическая часть спутниковой навигационной системы (СНС) и ИСЗ
3. Навигационная система (НС)
4. Инерциальная навигационная система (ИНС)
5. Приемная аппаратура спутниковой навигационной системы
6. Вычислитель действительных координат СНС
7. Радиомаяк
8. Система воздушно-скоростных сигналов (СВС)
9. Малогабаритный радиовысотомер малых высот
10. Система автоматического дистанционного управления (СДАУ)
11. Система команд радиоуправления
12. Информационно-логический блок
13. Приемная аппаратура командного радиоуправления
14. Обзорная телевизионная система
15. Система радиотелеметрии и радиотелеметрический приемник
16. Система автоконтроля работы бортовых систем ДПЛА с вычислителем
17. Система управления двигателем
18. Вычислитель системы автоматического управления (САУ)
19. Радиоретранслятор
20. Блок управления бортовыми системами
21. Бортовой накопитель информации
22. Система посадки и выпуска парашюта
23. Блок управления системой диагностики состояния магистральных газопроводов
24. Система диагностики состояния магистральных газопроводов
25. Радиовысотомер
26. Наземный пункт управления
27. Наземный пульт управления
28. Стартовая катапульта и система спасения
Сведения, подтверждающие возможность осуществления изобретения.
Автоматический беспилотный диагностический комплекс в соответствии с изобретением содержит дистанционно-пилотируемый летательный аппарат (ДПЛА), планер которого выполнен из дешевых композиционных материалов. Аэродинамическая схема ДПЛА содержит моноплан с высокорасположенным крылом небольшой стреловидности, двухбалочным хвостовым оперением и расположенным в задней части фюзеляжа двухцилиндровым двухтактным поршневым двигателем с трехлопастным толкающим воздушным винтом фиксированного шага. В центроплане крыла размещаются мягкие топливные баки. В центральной части центроплана размещают посадочный парашют. Хвостовое оперение выполнено двухкилевым. Между килями располагают стабилизатор.
В передней части фюзеляжа расположен отсек полезной нагрузки. Двигатель выполнен поршневым с трехлопастным винтом фиксированного шага, подключенным к системе управления двигателем 17.
ДПЛА имеет трехколесное шасси. Основные колеса имеют тормозные устройства, обеспечивающие одновременное и дифференциальное торможение, связанные с системой посадки и выпуска парашюта 22, подключенной к блоку управления бортовыми системами 20.
Бортовые системы ДПЛА содержат систему автоматического управления 1, состоящую из двух систем. Первая система - навигационная 3, в состав которой включены: инерционная навигационная система 4 (ИНС), приемная аппаратура спутниковой навигационной системы (СНС) 5, связанной с космической частью СНС 2, система воздушно-скоростных сигналов 8, подключенная к вычислителю САУ 18, малогабаритный радиовысотомер малых высот 9, подключенный к блоку управления бортовыми системами 20.
Вторая система - система автоматического дистанционного управления 10, в состав которой входят система командного радиоуправления 13, обзорная телевизионная система 14. Система управления двигателем 17 подключена к системе команд радиоуправления 11 и блоку управления бортовыми системами 20. Система телеметрии и приемник телеметрический 15 соединены с системой автоконтроля 16, подключенной к входу блока управления бортовыми системами 20, входы вычислителя САУ подключены к системе воздушно-скоростных сигналов 8, информационно-логический блок СДАУ 12 - к системе команд радиоуправления 11, а выход вычислителя САУ 18 связан с рулями направления 29. Блок управления бортовыми системами 20 связан с выходами радиовысотомера 25, бортового накопителя информации 21, радиомаяка 7, выходами системы посадки и выпуска парашюта 22, подключенной к системе команд радиоуправления 11 блока управления диагностической системы 23, вычислителя действительных координат 6, входы которого связаны с ИНС 4 и приемной аппаратурой СНС 5, система диагностики состояния магистральных газопроводов 24 подключена своими входом-выходом к блоку управления диагностической системы 23, установлены в передней части отсека фюзеляжа ДПЛА.
Наземная часть содержит приемник телеметрической системы 15, телевизионную систему 14, стартовую катапульту 28, связанную с наземным пультом управления 27 наземного пункта 26.
В блок управления системой диагностики состояния магистрального газопровода 23 встроены блок контроля функционального состояния диагностической системы, блок накопления диагностической информации, блок включения/отключения, блок включения обогрева диагностической аппаратуры, блок вычислений.
Система диагностики состояния магистральных газопроводов 24 содержит магнитометр, соединенный с пассивными магнитометрическими датчиками, тепловизор, лазерный газоанализатор, телевизионную систему и соединена с блоком управления системой диагностики.
Выполнение полета и диагностики состояния газовых трубопроводов с помощью АБДК, оборудованного в соответствии с изобретением, осуществляется следующим образом. Автоматический беспилотный диагностический комплекс обеспечивает наилучшие условия выполнения мониторинга и измерения параметров состояния газовых трубопроводов с помощью аппаратуры. Навигационная система 3 в составе инерциальной навигационной системы 4, приемной аппаратуры спутниковой навигационной системы 5, системы воздушно-скоростных сигналов 8, радиовысотомера малых высот 11 обеспечивают стабилизацию углового положения ДПЛА на всех режимах полета, управление полетом ДПЛА по заданному программой маршруту, выдачу потребителям текущих координат ДПЛА и другой навигационной информации.
Система автоматического дистанционного управления 10 в составе блока командного радиоуправления 11, информационного логического блока 12, приемной аппаратуры командного радиоуправления 13, обзорной телевизионной системы 14 обеспечивает:
- коррекцию или изменение маршрута полета ДПЛА;
- управление системами ДПЛА при выполнении автоматического взлета по-самолетному;
- управление системами ДПЛА при выполнении штатной, вынужденной или аварийной посадки по-самолетному;
- автоматическое пилотирование ДПЛА, прекращение выполнения задания и возврат на площадку посадки, в случае необходимости;
- обеспечивает безопасность полета ДПЛА и газопроводов в случае остановки двигателя, выхода из строя командной радиолинии управления.
В чрезвычайных обстоятельствах система переключает управление полетом ДПЛА на себя и работает автономно по записанной в БЦВМ 21 логике в соответствии с конкретными отказами.
Система обеспечения посадки ДПЛА включает парашютную систему, трехколесное шасси. Система обеспечивает выполнение посадки ДПЛА по-самолетному на подготовленную площадку.
Диагностирование выполняется с помощью установленных на ДПЛА газоанализатора, тепловизора, магнитометрической системы контроля катодной защиты трубопровода, с помощью телевизионной системы.
Тепловизор позволяет получить видимое изображение исследуемого трубопровода по его собственному тепловому (ИК) излучению, определяя формы и места положения слабонагретых и замаскированных трубопроводов в дневных и ночных условиях. Тепловые аномалии, создаваемые магистральными трубопроводами, связаны с транспортом нагретого газа и утечками из трубопровода.
Для работы системы диагностики обеспечивают ввод данных о точной высоте полета над трубой с помощью радиовысотомера, об угловых координатах положения планера, о текущих координатах местности, поступающих из НО в вычислитель блока управления системой диагностики состояния магистральных газопроводов и далее в блоки вычисления и накопления.
При этом для повышения точности регистрируемых изображений производится автоматическое управление скорости сканирования строчной тепловизионной и телевизионных систем по сигналам, формируемым в блоке управления диагностической аппаратурой 23. Сигнал формируют по соотношениям скорости и высоты полета.
В процессе полета обзорная телевизионная система передает на наземный пункт управления обзор местности, передает изображение, текущие координаты полета, информацию о работе и отказах бортовых систем. Оператор наблюдает на видеокамере изображение трубы относительно БЛА по визирной сетке. Изображением желаемой траектории полета является визирная сетка, перекрестие, направленное на цель, которую необходимо выдерживать. Объективы тепловизора, телевизионной системы автоматически закрываются с помощью шторок при взлете и посадке. Через командную радиолинию с земли оператор корректирует полет ДПЛА, осуществляет контроль функционального состояния диагностической системы, при необходимости ее обогрев и управление диагностической системой. В результате чего происходят измерения полей температурного контраста тепловизионной системой, затем измерение концентрации транспортируемого газа газоанализатором. Определение магнитного поля регистрируют в соответствии с линейным положением магнитометра по отношению к трубопроводу. При этом скорость сканирования тепловизионной и телевизионной систем устанавливается по сигналу, поступающему из блока управления 23, определяемому по соотношению скорости полета к высоте. Полученные измерения диагностической системы и параметры траектории полета поступают в блок вычислителя и затем в блок накопления диагностической информации, встроенные в блок управления диагностической системы 23.
В вычислителе действительных координат 6 значений траекторных параметров по информации СНС 5 и ИНС 4 определяются значения широты ϕg, долготы λg и высоты Hg с помощью следующих соотношений:
ϕg = ϕCHC+VN(t-tCHC)/rN;
λg = λCHC+VE(t-tCHC)/rEcosϕCHC);
Hg=НСНС+VH(t-tСНС),
где ϕCHC,λCHC, НСНС - координаты ЛА, выдаваемые СНС 5 в момент времени tСНС;
VN, VE, VH - составляющие вектора скорости, взятые из выходных параметров ИНС 8;
ZN, ZE - радиусы кривизны земного эллипсоида;
t - текущее время.
В декартовых координатах положение ЛА определяется по формулам (ось OY совпадает с направлением вертикали)
X = (aξ+H)cosϕcosλ;
Y = (aξ+H)cosϕsinλ;
Z = [aξ(1-e2)+H]sinϕ,
где ξ - разность между астрономической и геодезической широтой и вычисляется по формуле
где а - большая полуось эллипсоида Земли, е - эксцентриситет эллипса.
В вычислителе 5 используется комплексная обработка информации (КОИ), результатом которой является действительные значения параметров движения ЛА.
Xg=X-ΔX,
где ΔX - погрешность данной характеристики.
Повышение точности формирования действительных значения пилотажно-навигационных параметров достигается использованием оптимальной КОИ с реализацией фильтра Калмана. Алгоритм КОИ с избыточной информацией систем СНС 5 обеспечивает оценку и компенсацию в процессе обработки погрешностей ИНС 8.
Алгоритм калмановской фильтрации обеспечивает наилучшие линейные оценки вектора состояния системы ХK в момент времени tK, когда ХK определяется из уравнения состояния
XK+1=ФK+1,K XK+gK,
вектор измерения ZK представляется в виде
ZK=HKXK+τK,
здесь gK, τK - независимые шумы с нулевыми средними значениями и матрицей ковариаций
cov[gK]=QK; cov[τK]=RK,
ФK+1,K - фундаментальная матрица, НК - матрица измерений алгоритм имеет следующий вид:

Kk=Pk/k-1•HK T(Hk•Pk/k-1•HK T+Rk)-1;
Pk/k-1=Фk,k-1•Pk-1/k-1•ФK T,k-1+k;
Pk/k=Pk/k-1-Kk Hk Pk/k-1,
где  - априорная и апостериорная оценка вектора состояния Х на каждом шаге Рк/к-1;
- априорная и апостериорная оценка вектора состояния Х на каждом шаге Рк/к-1;
Рк/к - априорная и апостериорная ковариационные матрицы на каждом шаге;
Кк - весовая матрица.
В приемной аппаратуре СНС 5 измеряется псевдодальность по оценке задержки огибающей псевдослучайных последовательностей и радиальная псевдоскорость по оценке доплеровского смещения частоты несущей. В сигналы кодов закладывается соответствующий массив служебной информации, содержащий эфемериды, альманах, частотно-временные поправки, метки времени, сведения о работоспособности бортовой аппаратуры по результатам измерений. В приемной аппаратуре СНС 5 решается навигационно-временная задача.
Дальности измеряют путем фиксации времени (разности времени) распространения огибающей простых сигналов или фазы (разности фаз) модулирующих псевдослучайных последовательностей [7].
Радиальные скорости фиксируются по оценке доплеровского смещения несущих частот.
Пассивная дальномерная спутниковая навигационная система (СНС) работает по беззапросному принципу, и допускается определение навигационного параметра на БЛА. При навигационных измерениях принимаемый от ИСЗ сигнал сравнивается с сигналом местного эталона частоты (времени). Уравнение навигационного параметра имеет вид:
Д=[(Х-Хс)2+(Y-Yc)2+(Z-Zc)2]1/2+ΔДс,
куда входит систематическая погрешность измерений, здесь ΔT - расхождение эталонов времени на летательном аппарате (ЛА) и ИСЗ. Систематическая погрешность увеличивает на единицу число измерений, необходимых для определения местоположения ЛА [8].
Закон формирования управляющих сигналов в вычислителе 18 имеет следующий вид [9]:
hyзад = iVy•Vy+iΔH•ΔH,
где  - боковое отклонение и скорость изменения бокового отклонения от заданной линии пути;
- боковое отклонение и скорость изменения бокового отклонения от заданной линии пути;
Vy - вертикальная скорость;
ΔН - отклонение от заданной высоты полета.
Управление АБДК осуществляется с помощью системы автоматического управления САУ 18, обеспечивающей отработку и стабилизацию пространственной траектории, отслеживающей траекторию движения АБДК, и автомата управления тягой двигателей, выдерживающего заданную скорость полета.
Алгоритм управления в боковой плоскости
где F1 и F2 - функции ограничения;
Kγγ,Tωк,Kγ - коэффициенты передаточной функции.
Алгоритм управления в канале направления
Алгоритм управления высотой полета имеет вид:
где F3÷F5 - постоянные значения коэффициентов K1/p, KH, Тф, 
Принцип действия автомата тяги сводится к тому, что он перемещает РУД по сигналу разности между заданной V3 и текущей значениями скорости ΔV=V3-V.
В общем виде закон системы управления двигателем 17 имеет вид:
Δδруд = iνA(P)ΔV,
где iv - передаточное число, характеризующее соотношение между перемещением РУД и отклонением скорости в установившемся режиме; А(Р) - полином, определяющий динамические параметры закона управления автомата тяги. С учетом динамических свойств двигателя принимают, что двигатель вместе с его системой управления является апериодическим звеном. В этом случае зависимость тяги двигателей от отклонения РУД имеет вид:
TgPΔP+ΔP = KД•Δδруд, будет W(P) = iνKc/(Tg•TcP2+(Tg+Tc)P+1+iνKc),
будет W(P) = iνKc/(Tg•TcP2+(Tg+Tc)P+1+iνKc),
а передаточная функция, где Тc и Кс - постоянное значение в передаточной функции ЛА, Tg - постоянная времени двигателя, КД - коэффициент, характеризующий соотношение между тягой и отклонением РУД в установившемся режиме.
Таким образом, предложенный автоматический беспилотный диагностический комплекс позволяет получить визуальную информацию о состоянии магистральных газопроводов в сложных метеоусловиях, в любое время суток при полете ДПЛА на высоте ~50 м со скоростью 120...140 км/ч над газопроводом в равнинной местности по координатам с использованием СНС, что уменьшает ошибки, не превышающие по боковому отклонению ±10 м и по высоте ±20 м.
На наземный пункт управления непрерывно передаются в процессе полета текущие координаты по телеметрии 15. В каждом полете ДПЛА продиагностируется до 450 км газопровода. Обнаружение мест утечек газа обеспечивается диагностической системой при расходе газа 20...50 м3/сутки, выявляются разрушение покрытий в трубе площадью от 1 м2 и более. Полеты совершают в оба направления магистрали на удалении до 225 км (до следующей через одну станцию газоперекачки) с возвратом на площадку старта.
Использованная литература
1. Журнал "Крылья России", 98 г., г. Москва, "Беспилотные самолеты" "Пчелка - 1 т.", модели "Эксперт" и "Альбатрос", ОКБ им. А.С.Яковлева
2. "Fligt Int" - 1990 - 137, 4201, с. 15. Беспилотный самолет с новым крылом и оперением, фирма IAI, Израиль.
3. "Способ дистанционного обнаружения экологически опасных газов". Патент РФ 2158423, МПК 7 G 01 N 21/61, 2000 г.
4. "Способ обнаружения утечек природного газа из трубопроводов". Патент РФ 20171385, МПК G 01 N 21/61, 21/39.
5. "Авиационное устройство для обнаружения утечек газа из трубопроводов". Патент РФ 2091759, 95 г., МПК G 01 N 21/39.
6. "Способ и устройство для аэроразведки катодной защиты подземных трубопроводов", заявка ЕПВ 0052053, 82 г., МПК G 01 V 3/16, 3/165.
7. Шебшаевич В. С., Дмитриев П.П., Иванцевич и др. Сетевые спутниковые радионавигационные системы. М.: Радио и связь, 1993, с. 282.
8. Сосновский А.А., Хаймович Н.А. Авиационная радиоастрономия. М.: Транспорт, 1980.
9. Белгородский С.Л. Системы посадки самолетов. М.: Транспорт, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2362981C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2424539C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2506553C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2464592C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2480728C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2714845C1 |
| САМОЛЁТ ДЛЯ ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2001 |
|
RU2211785C1 |
| СПОСОБ ОБНАРУЖЕНИЯ УТЕЧЕК ГАЗА ИЗ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ БОРТОВЫМИ ДИАГНОСТИЧЕСКИМИ СИСТЕМАМИ И СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ УТЕЧКИ ГАЗА | 2000 |
|
RU2201584C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2012 |
|
RU2503038C1 |
Изобретение относится к технике диагностики состояния магистральных газопроводов и хранилищ. Комплекс содержит дистанционно пилотируемый летательный аппарат с планером, силовой установкой, системой автоматического управления и блоком управления бортовыми системами. В систему автоматического управления входят инерциальная навигационная система, приемная аппаратура спутниковой навигационной системы, радиовысотомер малых высот. Предусмотрены также система автоматического дистанционного управления полетом летательного аппарата и работой его систем, включающая систему командного радиоуправления, обзорную телевизионную систему, систему автоконтроля работы бортовых систем, систему обеспечения посадки, мобильный наземный пункт управления. В состав комплекса введены система диагностики состояния трубопроводов и блок управления системой диагностики, размещенные в фюзеляже летательного аппарата, а также вычислитель действительных координат. Комплекс обеспечивает повышенные точность и надежность обнаружения утечек газа и разрушений газового трубопровода. 1 ил.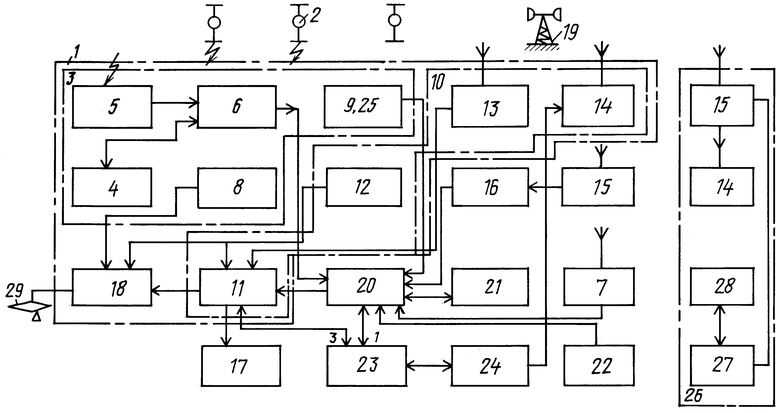
Автоматический беспилотный диагностический комплекс, содержащий дистанционно пилотируемый летательный аппарат, включающий планер, силовую установку с поршневым двигателем, систему автоматического управления с блоком управления бортовыми системами, содержащую инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, систему воздушно-скоростных сигналов и радиовысотомер малых высот, систему автоматического дистанционного управления полетом летательного аппарата и работой его систем, включающую систему командного радиоуправления, обзорную телевизионную систему, радиоретрансляционную систему, систему автоконтроля работы бортовых систем, радиотелеметрическую систему, систему обеспечения посадки с устройством торможения основных колес шасси, а также мобильный наземный пункт управления с устройствами связи и контроля, отличающийся тем, что в его состав введены система диагностики состояния магистральных трубопроводов и блок управления системой диагностики, размещенные в фюзеляже летательного аппарата, а также введен подключенный к инерциальной навигационной системе и приемной аппаратуре спутниковой навигационной системы вычислитель действительных координат, причем вычислитель действительных координат и первый вход-выход блока управления системой диагностики подключены к блоку управления бортовыми системами, второй вход-выход блока управления системой диагностики подключен к системе диагностики состояния газопровода, а третий вход-выход связан с системой командного радиоуправления.
| АВИАЦИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ УТЕЧЕК ГАЗА ИЗ ТРУБОПРОВОДОВ | 1995 |
|
RU2091759C1 |
| Способ дистанционного обнаружения утечек в трубопроводе | 1991 |
|
SU1800219A1 |
| Способ выявления нарушений изоляции подземных теплопроводов | 1986 |
|
SU1434212A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ДЕЙСТВУЮЩИХ ТРУБОПРОВОДОВ | 1992 |
|
RU2036372C1 |

