Изобретение относится к области контрольно-измерительной техники и может быть использовано для измерения линейных перемещений.
Известен трансформаторный датчик перемещений [1], содержащий источник переменного напряжения, обмотки возбуждения, измерительную и компенсационную обмотки, узлы коммутации, управляемые внешним сигналом, блоком преобразования напряжений.
Недостатком указанного датчика является малый диапазон измерения.
Наиболее близким по технической сущности к предлагаемому устройству является преобразователь линейных перемещений [2].
Преобразователь содержит генератор тактовых импульсов, блок синхронизации, блок питания датчика, подключенный к первичной обмотке дифференциально-трансформаторного датчика, вторичные обмотки которого соединены последовательно встречно и подключены на вход усилителя. Выход усилителя подключен на сигнальный вход устройства выборки-хранения. Выход устройства выборки-хранения подключен на вход аналого-цифрового преобразователя, выход которого через буферный каскад выведен на выход преобразователя. На управляющие входы устройства выборки-хранения и аналого-цифрового преобразователя подключен выход блока синхронизации. Выход синхронизации аналого-цифрового преобразователя подключен к синхровходу буферного регистра.
Недостатком преобразователя является то, что он не имеет возможности контроля собственной исправности.
Целью изобретения является повышение надежности путем контроля исправности преобразователя.
Поставленная цель достигается тем, что в преобразователе линейных перемещений, содержащем блок питания датчика, дифференциально-трансформаторный датчик с первичной обмоткой возбуждения, первой и второй вторичными полуобмотками, генератор тактовых импульсов, блок синхронизации, первый усилитель, устройство выборки/хранения, выход генератора тактовых импульсов подключен к входу блока синхронизации, первый выход которого подключен к синхровходу устройства выборки/хранения, а второй выход - к блоку питания датчика, выход которого через первичную обмотку датчика подключен к шине нулевого потенциала, выход первого усилителя подключен к сигнальному входу устройства выборки/хранения, введены первый и второй узлы коммутации, блок управления узлами коммутации, второй усилитель, делитель согласования, состоящий из двух резисторов согласования и резистора нагрузки, причем первая и вторая вторичные полуобмотки дифференциально-трансформаторного датчика выполнены рабочей и компенсационной, выход блока управления узлами коммутации подключен к управляющим входам первого и второго узлов коммутации, вывод от начала рабочей вторичной полуобмотки соединен со входом первого узла коммутации, вывод от конца рабочей вторичной полуобмотки соединен со входом второго узла коммутации, вывод от конца компенсационной вторичной полуобмотки подключен к первому выходу первого узла коммутации и второму выходу второго узла коммутации, вывод от начала компенсационной вторичной полуобмотки подключен к нулевой шине преобразователя, второй выход первого узла коммутации подключен к первому выводу первого резистора делителя согласования, первый выход второго узла коммутации подключен к первому выводу второго резистора делителя согласования, а вторые выводы резисторов делителя согласования подключены на резистор нагрузки делителя согласования и вход первого усилителя, вход второго усилителя подключен на выход устройства выборки/хранения, а выход второго усилителя является выходом преобразователя.
На чертеже приведена блок-схема преобразователя линейных перемещений.
Преобразователь линейных перемещений содержит дифференциально-трансформаторный датчик 3, состоящий из первичной питающей обмотки 2, двух вторичных полуобмоток 4, 5, подвижного якоря 15, закрепленного на объекте измерения, генератор тактовых импульсов 12, блок синхронизации 13, блок питания датчика 1, узлы коммутации 6 и 7 вторичных полуобмоток датчика 3, блок управления узлами коммутации 14, делитель согласования 8, первый усилитель 9, устройство выборки/хранения 10, второй усилитель 11. Выход генератора тактовых импульсов 12 соединен с входом блока синхронизации 13. Выход блока синхронизации 13 соединен с блоком питания датчика 1 и с синхровходом устройства выборки/хранения 10. Блок питания датчика 1 обеспечивает питание первичной питающей обмотки 2 датчика 3. Вход первого усилителя 9 подключен на выход делителя согласования 8. Выход первого усилителя подключен на измерительный вход устройства выборки/хранения 10. Выход устройства выборки/хранения 10 подключен на вход второго усилителя 11, а выход второго усилителя 11 является выходом преобразователя. Компенсационная вторичная полуобмотка 5 датчика 3 подключена одним выводом на нулевую шину и вторым выводом на первый выход 21 первого узла коммутации 6 и второй выход 19 второго узла коммутации 7. Рабочая вторичная полуобмотка 4 датчика 3 подключена одним выводом на входы первого 6 и второго 7 узлов коммутации. Второй выход 16 первого узла коммутации 6 подключен к первому выводу первого резистора делителя согласования 8. Первый выход 20 второго узла коммутации 7 подключен к первому выводу второго резистора делителя согласования 8. Вторые выводы резисторов согласования R1 и R2 подключены на резистор нагрузки R3 делителя согласования 8 и вход первого усилителя 9.
Преобразователь линейных перемещений работает следующим образом. Импульсы стабильной частоты с генератора тактовых импульсов 12 поступают на вход блока синхронизации 13, где из них формируются импульсы со скважностью Q=2 для синхронизации блока питания датчика 1 и короткие импульсы стробирования устройства выборки/хранения 10. В течение первого полупериода импульсов синхронизации в блоке питания датчика 1 формируется положительная полуволна синусоидального напряжения питания датчика, в течение второго полупериода - отрицательная.
Таким образом, блок питания датчика 1 обеспечивает питание первичной обмотки дифференциально-трансформаторного датчика 3 напряжением синусоидальной формы, синхронным с импульсами блока синхронизации 13, стабильность частоты которых определяется стабильностью генератора тактовых импульсов 12 и может быть достаточно высокой (например, применением кварцевого генератора). Синусоидальный сигнал подается на первичную обмотку 2 дифференциально-трансформаторного датчика 3, в которой возбуждаются магнитные потоки, наводящие ЭДС в рабочей 4 и компенсационной 5 полуобмотках. При перемещении подвижного ферромагнитного якоря 15 изменяются выходные напряжения в рабочей 4 и компенсационной 5 полуобмотках за счет изменения взаимной индуктивности между секциями первичной обмотки 2, рабочей 4 и компенсационной 5 полуобмоток. Сигналы с рабочей 4 и компенсационной 5 полуобмоток поступают на первый 6 и второй 7 узлы коммутации, где подключаются либо встречно (работает цепь делитель R1, R3, контакт 16, начало 17 обмотки 4, конец 18 обмотки 4, контакт 19, конец обмотки 5, начало обмотки 5, нулевая шина) при проведении измерений, либо согласно (работает цепи делитель R2, R3, контакт 20, конец 18 обмотки 4, начало 17 обмотки 4, контакт 21, конец обмотки 5, начало обмотки 5, нулевая шина) при проведении контроля.
Первый 6 и второй 7 узлы коммутации управляются блоком управления контроля 14 и подсоединяются к полуобмоткам 4 и 5 либо встречно при режиме «работа», либо согласно при режиме «контроль». С блока контроля сигналы (или рабочий с вывода 16, или контрольный с вывода 20), каждый через свой вход делителя напряжения 8 поступают на первый усилитель 9. После чего сигнал поступает на схему выборки/хранения 10, где по сигналу с блока синхронизации 13 происходит списывание амплитуды предыдущего периода синусоидального сигнала и запоминание амплитуды синусоидального сигнала настоящего периода. Далее сигнал поступает на второй усилитель 11 и с него на выход устройства.
При состоянии блока управления в режиме «работа» полуобмотки 4 и 5 включены последовательно встречно и происходит измерение положения ферромагнитного якоря 15, который подключен к объекту измерения, выходной сигнал зависит от настройки делителя R1, R3. При состоянии блока управления контроля 14 в режиме «контроль» полуобмотки 4 и 5 включены последовательно согласно и при изменении положения ферромагнитного якоря 15 изменения выходного сигнала практически не происходит, выходной сигнал остается фиксированным, зависящим только от настройки делителя R2, R3. В случае возникновения любой неисправности в схеме преобразователя линейных перемещений произойдет изменение выходного сигнала в режиме «контроль». Блок управления контролем 14 может быть включен в любое время: до измерений, в процессе измерений, после проведения измерений, в автоматическом режиме.
Т.о., предложенное техническое решение позволит повысить надежность преобразователя.
Источники информации
1. Авт.св. SU 1832177, опубл. 07.08.1993 г. Бюл. №29, МПК G01В 7/00.
2. Авт.св. SU 1702165, опубл. 30.12.1991 г. Бюл. №48, МПК G01В 7/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизированный конвертор | 1979 |
|
SU892425A1 |
| Инвертор | 1980 |
|
SU970598A1 |
| Стабилизированный преобразователь постоянного тока | 1980 |
|
SU1056168A1 |
| Стабилизированный преобразователь | 1978 |
|
SU832673A1 |
| Трансформаторный датчик перемещений | 1990 |
|
SU1832177A1 |
| Устройство для измерения ускорений | 1990 |
|
SU1748073A1 |
| ТРЕХФАЗНЫЙ УДВОИТЕЛЬ ЧАСТОТЫ | 1992 |
|
RU2024174C1 |
| Полумостовой инвертор | 1988 |
|
SU1607064A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1991 |
|
RU2007010C1 |
| Устройство для формирования импульсов управления тиристорами @ -фазного мостового преобразователя | 1983 |
|
SU1169102A1 |
Изобретение относится к области контрольно-измерительной техники Сущность: преобразователь содержит дифференциально-трансформаторный датчик 3, который состоит из первичной питающей обмотки 2, двух вторичных полуобмоток 4, 5, подвижного якоря 15, закрепленного на объекте измерения. Блок питания 1 датчика обеспечивает питание первичной питающей обмотки 2. Выход генератора тактовых импульсов 12 соединен с входом блока синхронизации 13. Выход блока синхронизации 13 соединен с блоком питания 1 и с синхровходом устройства выборки/хранения 10. Вход первого усилителя 9 подключен на выход делителя согласования 8, а выход - на измерительный вход устройства выборки/хранения 10. Выход устройства выборки/хранения 10 подключен на вход второго усилителя 11, а выход второго усилителя 11 является выходом преобразователя. Компенсационная вторичная полуобмотка 5 датчика 3 подключена одним выводом на нулевую шину и вторым выводом на первый выход 21 первого узла коммутации 6 и второй выход 19 второго узла коммутации 7. Рабочая вторичная полуобмотка 4 датчика 3 подключена одним выводом на входы первого 6 и второго 7 узлов коммутации. Второй выход 16 первого узла коммутации 6 подключен к первому выводу первого резистора R1 делителя согласования 8. Первый выход 20 второго узла коммутации 7 подключен к первому выводу второго резистора R2 делителя согласования 8. Вторые выводы резисторов согласования R1 R2 подключены на резистор нагрузки R3 и вход первого усилителя 9. С помощью узлов коммутации 6 и 7 вторичных полуобмоток 4, 5 происходит их переключение со встречного включения (режим-измерение») на согласное включение (режим-контроль»). В режиме «контроль» с помощью делителя согласования 8 можно установить заданную величину рабочего и контрольного выходных сигналов. Технический результат: повышение надежности за счет возможности контроля исправности преобразователя. 1 ил.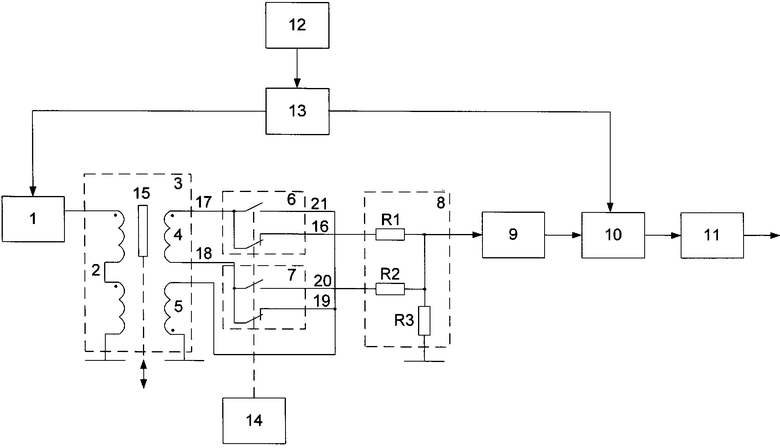
Преобразователь линейных перемещений, содержащий блок питания датчика, дифференциально-трансформаторный датчик с первичной обмоткой возбуждения, первой и второй вторичными полуобмотками, генератор тактовых импульсов, блок синхронизации, первый усилитель, устройство выборки/хранения, выход генератора тактовых импульсов подключен к входу блока синхронизации, первый выход которого подключен к синхровходу устройства выборки/хранения, а второй выход - к блоку питания датчика, выход которого через первичную обмотку датчика подключен к шине нулевого потенциала, выход первого усилителя подключен к сигнальному входу устройства выборки/хранения, отличающийся тем, что в него введены первый и второй узлы коммутации, блок управления узлами коммутации, второй усилитель, делитель согласования, состоящий из двух резисторов согласования и резистора нагрузки, причем первая и вторая вторичные полуобмотки дифференциально-трансформаторного датчика выполнены рабочей и компенсационной, выход блока управления узлами коммутации подключен к управляющим входам первого и второго узлов коммутации, вывод от начала рабочей вторичной полуобмотки соединен со входом первого узла коммутации, вывод от конца рабочей вторичной полуобмотки соединен со входом второго узла коммутации, вывод от конца компенсационной вторичной полуобмотки подключен к первому выходу первого узла коммутации и второму выходу второго узла коммутации, вывод от начала компенсационной вторичной полуобмотки подключен к нулевой шине преобразователя, второй выход первого узла коммутации подключен к первому выводу первого резистора делителя согласования, первый выход второго узла коммутации подключен к первому выводу второго резистора делителя согласования, а вторые выводы резисторов делителя согласования подключены на резистор нагрузки делителя согласования и вход первого усилителя, вход второго усилителя подключен на выход устройства выборки/хранения, а выход второго усилителя является выходом преобразователя.
| Преобразователь линейных перемещений | 1989 |
|
SU1702165A1 |
| Трансформаторный датчик перемещений | 1990 |
|
SU1832177A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2082076C1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |

