Уровень техники
Для определения и сообщения местоположения человека или предмета часто используются устройства сообщения местоположения. Типичное устройство сообщения местоположения сочетает в себе навигационную систему, такую как модуль Системы глобального позиционирования (GPS), с системой мобильной связи, такой как сотовый модем, для определения местоположения или географического положения контролируемого человека или имущества и сообщает свое местоположение устройству слежения. Устройства сообщения местоположения используются в различных системах, в которых требуется своевременная информация о местоположении, таких как система слежения за транспортными средствами и система возврата имущества.
Система слежения за транспортными средствами позволяет пользователю контролировать местоположение судна или транспортного средства, оснащенного устройством сообщения местоположения, посредством отправки последовательности засечек местоположения. Словосочетание «засечка местоположения» относится к процессу определения неизвестного положения при помощи заданной контрольной точки или точек. Например, можно сделать вывод о направлении движения транспортного средства при помощи последовательности засечек, посланных устройством сообщения местоположения. Аналогичным образом можно сделать вывод о том, что транспортное средство не перемещается, когда сообщение о последовательности засечек указывает на одно и то же положение. Системы слежения за транспортными средствами обычно используются службами доставки для определения маршрута и диспетчеризации транспортных средств. Системы возврата имущества сообщают поставщику услуг или полиции местоположение похищенного или пропавшего имущества (например, похищенного автомобиля) для упрощения возврата собственности.
Недостаток, связанный с устройствами сообщения местоположения, заключается в количестве потребляемой ими энергии. Хотя существуют устройства сообщения местоположения, работающие на батареях, количество потребляемой ими энергии во включенном состоянии таково, что требует частой смены батарей для продолжения работы.
В последнее время возникла озабоченность, связанная с работой различных электронных устройств в определенных условиях. Например, авиакомпании требуют, чтобы пассажиры воздерживались от использования мобильных телефонов и ноутбуков во время взлета и посадки, поскольку они создают электромагнитные помехи, которые могут помешать работе навигационных систем и другого оборудования на борту самолетов. С июля 2001 г. Пентагон ввел мораторий на дальнейшее создание сетей беспроводной связи и запретил подключение к секретным сетям и компьютерам при помощи устройств, которые не были явным образом одобрены Министерством обороны. Это сделано с целью не допустить ненамеренного разглашения секретных данных, и в число этих устройств входят персональные беспроводные устройства, такие как пейджеры, персональные ассистенты (PDA) и беспроводные устройства для электронной почты. В качестве другого примера можно привести тот факт, что многие общественные заведения, такие как кинотеатры и рестораны, требуют сейчас от своих посетителей отключать беспроводные устройства (например, мобильные телефоны и пейджеры) при нахождении на их территории.
Раскрытие изобретения
Техническим результатом от реализации заявленного изобретения является обеспечение управления подвижным объектом в едином цикле с определением координат его местоположения, что позволит в режиме реального времени управлять движением объекта, используя для этого непосредственно энергию, содержащуюся в сигнале отклика, генерируемого подвижным объектом.
Один вариант осуществления в соответствии с изобретением может включать в себя контроллер, который может быть связан с компонентом определения местоположения и компонентом обнаружения движения. В одном варианте осуществления компонент обнаружения движения обнаруживает движение передвижного объекта и вырабатывает для контроллера сигнал, указывающий на наличие движения. В ответ на этот сигнал контроллер дает команду компоненту определения местоположения определить географическое положение передвижного объекта. Определяется, попадает ли географическое положение в заданную зону. По результатам определения вырабатывается команда управления передвижным объектом.
Варианты осуществления настоящего изобретения могут включать в себя способы и системы для управления ценным передвижным объектом. В одном варианте осуществления контроллер связан с компонентом определения местоположения, компонентом беспроводной связи и компонентом обнаружения движения. В одном варианте осуществления компонент обнаружения движения обнаруживает движение ценного передвижного объекта и вырабатывает для контроллера сигнал, указывающий на наличие перемещения. В ответ на этот сигнал контроллер включает устройство определения и (или) сообщения местоположения для определения географического положения ценного передвижного объекта. В одном варианте осуществления контроллер сравнивает географическое положение электронного устройства с заданной зоной и вырабатывает на основе сравнения команду для управления ценным передвижным объектом.
Варианты осуществления настоящего изобретения можно использовать для того, чтобы ценный передвижной объект выполнял определенную задачу при входе в заданную зону и выходе из нее. Например, варианты осуществления изобретения можно использовать для автоматического отключения ценного передвижного объекта (например, мобильного телефона), когда его вносят в зону, в которой действуют ограничения. Такой зоной могут быть кинотеатры, аэропорты, больницы, бензозаправочные станции и другие зоны, где работа электронного устройства может вызвать, к примеру, нежелательные электромагнитные помехи для другого оборудования, находящегося в зоне. Пользователь может установить эти зоны, чтобы уменьшить возможность забыть выключить устройство. В другом варианте осуществления пользователь может принять заготовленный перечень таких запретных зон для автоматической реализации этой функции отключения.
Аналогично варианты осуществления изобретения можно использовать для того, чтобы ценный передвижной объект мог выполнить определенную задачу, когда его перемещают за пределы установленной зоны. Так, когда пользователь покидает кинотеатр, больницу, аэропорт и т.п., варианты настоящего изобретения могут вызвать автоматическое включение ценного подвижного объекта. Например, мобильный телефон пользователя может включиться, когда пользователь перемещается за пределы кинотеатра.
В другом варианте осуществления настоящее изобретение можно использовать для защиты от краж. Например, если ценный груз перемещается за пределы зоны, установленной владельцем, настоящее изобретение может вызвать включение звуковой сигнализации груза, отправку уведомления поставщику услуг безопасности и (или) установление связи с владельцем груза (например, установление связи с владельцем посредством пейджера, мобильного телефона или сообщения электронной почты).
Хотя в настоящем изложении сущности изобретения приведены частные варианты осуществления настоящего изобретения, следует отметить, что изобретение не ограничивается этим вариантом осуществления. Подразумевается, что изобретение охватывает все альтернативные варианты, модификации и эквиваленты, которые не выходят за рамки объема притязаний изобретения, определенного формулой.
Краткое описание чертежей
Фиг.1 представляет собой блок-схему типичного запускающего компонента в соответствии с вариантами осуществления настоящего изобретения.
Фиг.2 представляет собой схему системы слежения за местоположением в соответствии с вариантами осуществления настоящего изобретения.
Фиг.3 представляет собой схему с изображением рабочих состояний запускающего компонента, используемого в соответствии с настоящим изобретением.
Фиг.4 представляет блок-схему способа управления передвижным объектом в соответствии с вариантами осуществления настоящего изобретения.
Фиг.5 представляет собой блок-схему способа управления энергопотреблением в передвижном объекте в соответствии с вариантами осуществления настоящего изобретения.
Фиг.6 представляет собой способ управления передвижным объектом в соответствии с вариантами осуществления настоящего изобретения.
Осуществление изобретения
Ниже приведены подробные описания вариантов осуществления настоящего изобретения, примеры которых иллюстрируются прилагаемыми чертежами. Хотя настоящее изобретение будет описано в сочетании с нижеприведенными вариантами осуществления, следует иметь в виду, что они не должны ограничивать изобретение только этими вариантами осуществления. Напротив, подразумевается, что изобретение охватывает альтернативные варианты, модификации и эквиваленты, которые не выходят за рамки объема притязаний изобретения, определенного прилагаемой формулой изобретения. Кроме того, в нижеследующем подробном описании изобретения приведены многочисленные подробности с целью обеспечить более глубокое понимание изобретения. Однако варианты осуществления изобретения могут быть реализованы и без этих подробностей. В других случаях не приводятся подробные описания известных способов, процедур, компонентов и схем, чтобы излишне не затемнять понимание объектов изобретения.
Варианты осуществления настоящего изобретения могут относиться к способу и системе для управления ценным передвижным объектом. Варианты осуществления настоящего изобретения могут использоваться для контроля положения ценного подвижного объекта и для выработки команд для автоматического выполнения объектом одного или нескольких заданных действий на основе своего географического положения. Варианты осуществления настоящего изобретения могут также использоваться для обнаружения и сообщения о несанкционированном перемещении ценного передвижного объекта и для содействия его возврату в случае, когда имеет место несанкционированное перемещение. Варианты осуществления настоящего изобретения могут обнаруживать и сообщать о поведении ценного передвижного объекта при помощи просмотровой таблицы или таблицы событий, которая вызывает функцию сообщения. Варианты осуществления настоящего изобретения могут использоваться для выработки команд для автоматического выполнения ценным передвижным объектом одного или нескольких заданных действий на основе того, что пропущен срок оплаты счета по нему. Варианты осуществления настоящего изобретения могут использоваться для обнаружения и сообщения о любых неисправностях ценного подвижного объекта.
Варианты осуществления настоящего изобретения содержат запускающий компонент, расположенный в ценном передвижном объекте. В соответствии с вариантами осуществления настоящего изобретения подкомпоненты запускающего компонента могут быть распределены внутри ценного передвижного объекта так, чтобы они помещались под оболочкой, кожухом или корпусом. Запускающий компонент может использовать компонент обнаружения движения для обнаружения движения ценного передвижного объекта и направления сигнала контроллеру. В ответ на прием сигнала контроллер запускает компонент определения местоположения для определения географического положения ценного передвижного объекта. Таким образом можно продлить срок службы батареи запускающего компонента (или срок службы батареи ценного передвижного объекта, использующего ее), поскольку запускающий компонент потребляет минимальное количество энергии до обнаружения перемещения объекта. В одном варианте осуществления географическое положение сравнивается с координатами зоны, интересующей пользователя. В зависимости от того внутри какой зоны расположен ценный передвижной объект, контроллер вырабатывает одну или несколько команд для выполнения ценным передвижным объектом одного или нескольких конкретных действий.
Варианты осуществления настоящего изобретения могут использовать систему геоограждения, в которой предоставляют набор координат местоположения, который определяет заданную зону. В вариантах осуществления настоящего изобретения при входе в заданную зону или выходе из нее могут вырабатываться одна или несколько команд для выполнения ценным передвижным объектом одного или нескольких частных заданий. Например, варианты осуществления настоящего изобретения могут быть выполнены с возможностью автоматически отключать ценный передвижной объект при входе в эту зону и автоматически включать ценный передвижной объект при выходе из зоны. Помимо этого верно и обратное: варианты настоящего изобретения могут быть выполнены с возможностью автоматически включать ценный передвижной объект при входе в определенную зону и автоматически отключать ценный передвижной объект при выходе из зоны. В другом варианте осуществления координаты местоположения определяют зону, в которой имущество может перемещаться, не вызывая включения сигнализации. Когда ценный передвижной объект перемещается за пределы этой зоны, он выдает сигнал, который может использоваться для включения звуковой сигнализации до тех пор, пока она не будет отключена. В альтернативном варианте тот же сигнал может запустить беспроводное сообщение, которое направляется службе слежения, которая уведомляет владельца устройства и (или) правоохранительный орган для облегчения возврата ценного передвижного объекта. В других вариантах осуществления изобретения беспроводное сообщение может быть направлено службе слежения, которая уведомляет владельца устройства и (или) правоохранительный орган о том, что ценный передвижной объект перемещается, когда он не должен перемещаться, или что ценный передвижной объект не перемещается, когда он должен перемещаться.
Пример системы геоограждения описан в патенте США №5.751.245, озаглавленном «Система сообщения о нарушениях маршрута и расписания транспортных средств», авторы James Janky, Eric Klein и John Schipper, уступленном компании Trimble Navigation Ltd., Саннивейл, штат Калифорния, и полностью включенном в настоящий документ посредством ссылки.
На фиг.1 приведена блок-схема типичного запускающего компонента 100 в соответствии с вариантом осуществления настоящего изобретения. Запускающий компонент 100 включает в себя процессор 101, соединенный с адресной шиной / шиной данных 102. Процессор 101 предназначен для обработки цифровой информации и команд, а шина 102 предназначена для передачи цифровой информации между различными компонентами запускающего компонента 100. Кроме того, с шиной 102 соединена энергонезависимая память 103, например постоянное запоминающее устройство (ПЗУ), для хранения информации и команд более постоянного свойства наряду с энергозависимой памятью 104, например оперативно запоминающим устройством (ОЗУ), для хранения цифровой информации и команд более непостоянного свойства. Кроме того, запускающий компонент 100 может опционально включать в себя устройство 105 хранения данных для хранения больших объемов данных.
В вариантах осуществления настоящего изобретения устройство 105 хранения данных может включать в себя съемный носитель данных, такой как смарт-карта или оптическое устройство хранения данных. Альтернативно устройство 105 хранения данных может включать в себя программируемое устройство хранения данных, такое как устройство флэш-памяти, для упрощения быстрого обновления данных. Следует заметить, что команды для процессора 101, а также координаты местоположения, которые определяют заданную зону, могут храниться в энергозависимой памяти 104, в устройстве 105 хранения данных и (или) во внешнем устройстве хранения данных (не показано). Аналогично ранее определенное географическое положение запускающего компонента 100 и ранее замеренные сигналы GPS могут храниться в энергозависимой памяти 104, устройстве 105 хранения данных и (или) во внешнем устройстве хранения. Конфигурационные данные для определения того, какое действие следует запустить в зависимости от одного или нескольких заданных обстоятельств (например, текущего времени и (или) положения), относящихся к запускающему компоненту 100, могут также храниться в энергозависимой памяти 104, устройстве 105 хранения данных и (или) во внешнем устройстве хранения.
Как показано на фиг.1, запускающий компонент 100 дополнительно включает в себя датчик 106 движения, соединенный с шиной 102, для обнаружения изменений в состоянии движения запускающего компонента 100. В одном варианте осуществления датчик 106 движения может обнаруживать вибрацию, связанную с движением запускающего компонента 100, и сообщать об этом движении процессору 101, когда обнаруживаются изменения в вибрации запускающего компонента 100. В других вариантах осуществления настоящего изобретения датчик 106 движения может быть датчиком ускорения, датчиком наклона, датчиком вращения, гироскопом и т.д. Однако, хотя настоящий вариант осуществления приводит эти частные реализации датчика 106 движения, в настоящем изобретении вполне можно использовать разнообразные устройства для обнаружения движения запускающего компонента 100 и для сообщения об этом движении процессору 100.
В соответствии с вариантами осуществления настоящего изобретения датчик 106 движения может обнаруживать, когда запускающий компонент 100 переходит от практически неподвижного состояния к движущемуся состоянию. Датчик 106 движения может также обнаруживать, когда запускающий компонент 100 переходит от движущегося состояния к практически неподвижному состоянию и (или) изменяет скорость движения запускающего компонента 100. Соответственно, в вариантах осуществления настоящего изобретения датчик 106 движения может обнаруживать изменения в состоянии движения запускающего компонента 100, такие как начало или прекращение движения, а также ускорение или замедление. В ответ на эти изменения в движении датчик 106 движения вырабатывает прерывание. В ответ на прерывание от датчика 106 движения процессор 101 изменяет рабочее состояние запускающего компонента 100, переводя его из неактивного рабочего состояния, в котором некоторые компоненты (например, компонент 107 беспроводной связи и компонент 110 определения местоположения) запускающего компонента 100 потребляют минимальное количество энергии, в активное рабочее состояние, в котором запускающий компонент 100 потребляет дополнительную энергию.
Как показано на фиг.1, компонент 107 беспроводной связи, включающий в себя беспроводной модем 108 и радиоантенну 109, соединен с шиной 102. Компонент 110 определения местоположения, включающий в себя приемник 111 GPS и антенну 112 GPS, соединен с шиной 102.
Компонент 107 беспроводной связи может быть предназначен для передачи и приема беспроводных сообщений (например, данных и (или) команд). В одном варианте осуществления компонент 107 беспроводной связи может включать в себя радиоантенну 109 сотовой связи и беспроводной модем 108 сотовой связи. В одном варианте осуществления запускающий компонент отправляет и принимает сообщения при помощи Службы коротких сообщений (SMS). Однако настоящее изобретение подходит также для использования сообщений другого формата. В других вариантах осуществления настоящего изобретения компонент 107 беспроводной связи может включать в себя устройство беспроводной связи Bluetooth или другое устройство беспроводной связи, такое как приемопередатчик Wi-Fi. Приемопередатчики Wi-Fi часто используются для создания локальных сетей (LAN) между переносными компьютерами и пунктом доступа в Интернет в таких общественных местах, как аэропорты, кофейни, рестораны, библиотеки и т.п.
Система 110 определения местоположения может быть предназначена для определения положения запускающего компонента 100. В вариантах осуществления настоящего изобретения компонент 110 может включать в себя антенну 112 GPS и приемник 111 GPS. Однако, хотя настоящий вариант осуществления специально упоминает систему определения местоположения GPS, варианты настоящего изобретения также подходят для использования различных наземных и спутниковых систем определения местоположения.
Как показано на фиг.1, с шиной 102 соединен управляющий элемент 113, который может быть предназначен для выработки управляющего сигнала посредством управляющего интерфейса 114 в зависимости от текущего времени и (или) положения запускающего компонента 100.
В число устройств, которые опционально связаны с запускающим компонентом 100, может входить устройство 116 отображения для отображения информации пользователю. Устройство 116 отображения может быть устройством на жидких кристаллах (ЖК) (LCD), электронно-лучевой трубкой (ЭЛТ), дисплеем с автоэлектронной эмиссией, плазменным дисплеем или другим устройством отображения, подходящим для создания графических изображений и алфавитно-цифровых символов, понятных пользователю. Кроме того, в вариантах осуществления настоящего изобретения с шиной 102 может быть связано устройство 115 пользовательского ввода. В вариантах осуществления настоящего изобретения устройство 115 пользовательского ввода может включать в себя, в частности, клавиатуру и устройство управления курсором (например, мышь, трекбол, световое перо, сенсорную панель, джойстик и т.д.) для ввода данных, вариантов выбора, обновлений и для управления запускающим компонентом. Запускающий компонент 100 может опционально включать в себя батарею 117 для обеспечения энергией запускающего компонента 100. Хотя настоящий вариант осуществления относится к устройству, питаемому батареей, настоящее изобретение вполне может быть электрически связано с устройством или объектом, которым оно управляет (или с которым оно связано), и может получать энергию от этого объекта. Например, если запускающий компонент 100 расположен внутри ноутбука, он может получать энергию от самого ноутбука.
Как показано на фиг.1, в вариантах осуществления настоящего изобретения компоненты запускающего компонента 100 могут быть расположены на печатной плате 120, такой как карта Ассоциации производителей карт памяти для персональных компьютеров (PCMCIA), и т.п. Это позволяет использовать варианты осуществления настоящего изобретения в различных ценных передвижных объектах, таких как, в частности, груз любого рода, электрогенераторы, строительные транспортные средства, тракторы, грузовые автомобили, суперкомпьютеры, инструменты, мобильные телефоны, ноутбуки, карманные персональные компьютеры, самоходные электрические системы и т.п. Однако в других реализациях настоящего изобретения запускающий компонент 100 может быть автономным устройством, которое используется для управления другим устройством или объектом. Например, запускающий компонент 100 может быть установлен на экскаваторе с обратной лопатой и использоваться для запуска действия, зависящего от положения экскаватора с обратной лопатой. Заметим, что компоненты запускающего компонента 100 могут быть расположены внутри корпуса (не показан). Поэтому в вариантах осуществления настоящего изобретения ценный передвижной объект может быть сконструирован таким образом, что корпус, содержащий запускающий компонент 100, может быть встроен в него или составлять с ним единое целое. В альтернативном случае в вариантах настоящего изобретения компоненты запускающего компонента 100 могут быть распределены внутри ценного передвижного объекта таким образом, чтобы они помещались в корпусе, кожухе или оболочке объекта.
Представляется, что некоторые из перечисленных выше компонентов могут быть исключены в вариантах настоящего изобретения. Например, когда запускающий компонент 100 расположен внутри ноутбука или КПК, устройство 116 отображения и устройство 115 пользовательского ввода могут быть излишними и поэтому исключены с целью снижения стоимости запускающего компонента 100. В других реализациях вариантов осуществления настоящего изобретения запускающий компонент 100 может быть расположен в ценном передвижном объекте, который уже обладает возможностью беспроводной связи (например, мобильный телефон). В этом случае в вариантах настоящего изобретения может быть исключен компонент 107 беспроводной связи для снижения стоимости запускающего компонента 100. Кроме того, в вариантах осуществления настоящего изобретения может быть исключен управляющий элемент 113. Например, управляющий сигнал для управления ценным передвижным объектом может вырабатываться процессором 101 посредством управляющего интерфейса 114.
Как показано на фиг.1, в вариантах осуществления настоящего изобретения, когда датчик 106 движения обнаруживает движение запускающего компонента 100, он может вырабатывать сигнал прерывания, поступающий на процессор 101. В ответ на сигнал прерывания процессор 101 может запустить другие компоненты запускающего компонента 100, такие как компонент 107 беспроводной связи и компонент 110 определения местоположения. Затем может быть определено географическое положение запускающего компонента 100 при помощи компонента 110 определения местоположения. Процессор 101 может сравнить текущее географическое положение с географическими координатами, которые определяют заданную зону. Координаты заданной зоны могут находиться в энергозависимой памяти 104 и (или) в устройстве 105 хранения данных. На основе этого сравнения процессор 101 может вызвать выработку одной или нескольких команд управляющим элементом 113 для управления ценным передвижным объектом, который связан с запускающим компонентом 100 или в котором находится запускающий компонент 100.
В альтернативном варианте процессор 101 может сам выработать одну или несколько команд для управления ценным передвижным объектом. Например, запускающий компонент 100 может быть выполнен с возможностью выработки одной или нескольких команд, вызывающих отключение ценного передвижного объекта, когда он входит в зону с установленными ограничениями, такую как кинотеатр или проход, ведущий из зала вылета к самолету при посадке на него. Поскольку запускающий компонент 100 может быть запрограммирован таким образом, чтобы работать автономно для выполнения этой функции отключения, он может осуществить это в отношении ценного передвижного объекта, который также хранится в багаже, выполняя еще одну ценную услугу по прекращению разрядки батарей, когда объект находится в месте, где его нельзя использовать. Когда ценный передвижной объект перемещается за пределы зоны с установленными ограничениями, процессор 101 может выработать сигнал, вызывающий включение объекта. Это может быть в высшей степени удобно пользователям, которые могут забыть отключить свои ценные передвижные объекты при входе в зону с установленными ограничениями и включить их вновь при выходе из зоны с установленными ограничениями.
Как показано на фиг.1, в вариантах осуществления настоящего изобретения устройство 105 хранения данных может хранить базу данных географических координат, которые могут определять множество заданных зон и связанных с ними команд, которые должны быть выработаны процессором 101 в зависимости от того, находится ли ценный передвижной объект внутри или вне заданной зоны. Кроме того, географические координаты могут определять маршрут или множество маршрутов. Если ценный передвижной объект отклоняется от заданного маршрута, процессор 101 может выработать команды, направляемые передвижному объекту. Например, процессор 101 может вызвать включение ценным передвижным объектом звуковой сигнализации или другого шумового сигнала в качестве средства защиты от кражи, если устройство перемещено в заданную зону. В альтернативном варианте процессор 101 может запустить отправку сообщения посредством устройства 101 беспроводной связи с извещением владельца ценного передвижного объекта о том, что объект покинул заданную зону, или с извещением полиции или других органов. Кроме того, процессор может запустить непрерывное обновление положения с целью содействовать возврату ценного передвижного объекта, если объект был украден.
Информация о географическом положении или маршруте, используемая для определения того, какое действие должно быть запущено вариантами осуществления настоящего изобретения, может быть дополнительно изменена посредством временной информации. Например, если запускающий компонент 100 расположен внутри ценного передвижного объекта, такого как автомобиль, то наряду с параметрами местоположения могут использоваться временные параметры для определения того, какое действие должны запустить варианты осуществления настоящего изобретения. Соответственно, пользователь может указать свой обычный маршрут, используемый для поездки на работу, и время, когда автомобилю позволено находиться на этом маршруте. В случае кражи автомобиля запускающий компонент 100 может выработать один или несколько управляющих сигналов, даже если географическое положение автомобиля находится в заданных пределах маршрута поездки на работу, поскольку автомобиль находится в этом положении в неподходящее время.
Как показано на фиг.1, запускающий компонент 100 может, как описано выше, запустить выработку сообщения с указанием, что автомобиль украден, или может каким-то образом отключить автомобиль, чтобы воспрепятствовать дальнейшему движению автомобиля. Например, запускающий компонент 100 может быть связан с системой зажигания и (или) с компьютером автомобиля. После определения наличия несанкционированного перемещения автомобиля запускающий компонент 100 может выработать управляющий сигнал для отключения двигателя автомобиля в следующее мгновение после того, как датчик 106 движения определяет, что автомобиль прекратил движение. В этом случае запускающий компонент 100 не отключает автомобиль, например, посреди дороги, что может создать опасность для других участников движения. Заметим, что запускающее устройство без датчика движения, имеющегося в вариантах осуществления настоящего изобретения, не сможет работать таким образом и может обеспечить менее гибкое или менее ответственное решение в некоторых ситуациях, с которыми справляются варианты осуществления настоящего изобретения.
Использование датчика движения совместно с устройством определения местоположения кажется аналогичным или, по меньшей мере, избыточным в условиях сообщения текущего местоположения, когда для вывода о наличии движения устройства сообщения опираются на последовательные засечки местоположения. Например, прием последовательности сообщений о местоположении, которые приходят из разных мест, означает, что запускающее устройство движется. Напротив, прием последовательности сообщений о местоположении, которые приходят из одного места, означает, что запускающее устройство неподвижно. Поэтому считалось излишним снабжать компонентом определения движения устройство, которое уже содержит в себе функцию определения движения.
Однако наличие запускающего компонента 100 с датчиком 106 движения имеет преимущество, поскольку сокращается время, в течение которого запускающий компонент 100 находится в активном состоянии для определения географического местоположения, а тем самым продлевается срок службы батареи 117 или срок службы батареи ценного передвижного объекта, с которым может быть связан запускающий компонент 100. В традиционных запускающих устройствах определение наличия или отсутствия движения устройства зависело от определения и сравнения последовательных засечек местоположения. Если последовательные засечки местоположения приходили из одного места, делался вывод, что устройство неподвижно. Если последовательные засечки местоположения приходили из разных мест, делался вывод, что устройство движется. Эти засечки местоположения необходимо было делать через регулярные промежутки времени, чтобы обеспечить своевременное извещение о движении устройства. Однако получение последовательных засечек местоположения для неподвижного устройства является излишним расходованием энергии батареи, особенно когда устройство остается неподвижным продолжительное время. Это, в свою очередь, является обременительным для пользователей устройства, которым необходимо часто заменять батареи (например, батареи 117) запускающего компонента 100 или батарею питания ценного передвижного объекта, в котором находится запускающий компонент, либо подключать ценный передвижной объект к внешнему источнику питания.
Как показано на фиг.1, в вариантах осуществления настоящего изобретения устройство 105 хранения данных может также хранить ранее определенные географические местоположения запускающего компонента 100 и (или) ранее замеренные сигналы GPS. Это способствует обнаружению сигнала в условиях, когда направление на спутники частично или полностью перекрыто, например внутри здания. В некоторых вариантах реализации GPS ранее полученные замеры сигналов GPS можно использовать для более быстрого определения текущего положения приемника GPS (например, приемника 111) и улучшить его чувствительность в условиях низкого отношения сигнал/шум.
Одна такая система описана в патенте США №6.289.041, озаглавленном «Высокочувствительный приемник GPS с быстрым обнаружением сигнала», автор Norman F. Krasner, уступленном компании SnapTrack Inc., Сан-Хосе, Калифорния и полностью включенном в настоящий документ посредством ссылки. В этом патенте описывается система, в которой текущий замеряемый сигнал GPS накапливается совместно с ранее замеренным сигналом GPS для повышения чувствительности и скорости обнаружения у приемника. Однако настоящее изобретение подходит для использования множества вариантов реализации для повышения чувствительности приемника GPS в условиях низкого отношения сигнал/шум.
Хотя варианты осуществления настоящего изобретения можно использовать в качестве автономного устройства, другие варианты осуществления настоящего изобретения могут использовать другие способы определения положения ценного передвижного объекта. Например, многие системы мобильной телефонии совместимы со стандартами Е911, которые стремятся улучшить качество беспроводной службы 911. Этап 1 программы требует, чтобы операторы сообщали о положении антенны, принимающей беспроводной вызов. Этап 2 программы требует, чтобы операторы сообщали гораздо более точную информацию о положении (например, в пределах 50-100 метров).
Одним из решений, обеспечивающих соответствие уровню этапа 2, является система определения положения при помощи сервера, описанная в патенте США №6.131.067, озаглавленном «Устройство удаленного обнаружения на основе архитектуры клиент-сервер», авторы Richard Girerd и Norman Krasner, уступленном компании SnapTrack Inc., Сан-Хосе, Калифорния и полностью включенном в настоящий документ посредством ссылки. В этой системе удаленное устройство отправляет данные GPS серверу, который обрабатывает данные для определения местоположения удаленного устройства. Затем сервер передает определенное местоположение клиенту, который может отобразить местоположение удаленного устройства. В вариантах осуществления, предложенных Girerd, удаленное устройство может отправить серверу необработанные сигналы местоположения (например, спутниковые сигналы GPS), которые затем обрабатываются для определения местоположения удаленного устройства.
Пример недавно возникшей наземной технологии описан в заявке на получение патента США №10/159.478, озаглавленной «Определение местоположения при помощи сигналов глобального позиционирования, дополненных сигналами вещательного телевидения», авторы Matthew Rabinowitz и James Spilker, поданной 31 мая 2002 г., уступленной компании Rosum Corporation, Редвуд-сити, Калифорния и полностью включенной в настоящий документ посредством ссылки. В указанной выше заявке описаны способ и система, которые используют сигналы вещательного телевидения совместно с сигналами GPS для определения положения терминала пользователя.
Другой пример недавно возникшей наземной технологии описан в заявке на получение патента США №10/054.302, озаглавленной «Определение местоположения при помощи сигналов вещательного аналогового телевидения», авторы Matthew Rabinowitz и James Spilker, поданной 22 января 2002 г., уступленной компании Rosum Corporation, Редвуд-сити, Калифорния и полностью включенной в настоящий документ посредством ссылки. В указанной выше заявке описаны способ и система, которые используют множество аналоговых телевизионных передатчиков в качестве известных опорных точек для определения местоположения терминала пользователя.
В заявке на получение патента США №09/932.010, озаглавленной «Определение местоположения при помощи сигналов наземного вещательного телевидения, работающего в формате цифрового видео», поданной 17 августа 2001 г., и в заявке на получение патента США №10/054.262, озаглавленной «Отслеживание цифровых телевизионных сигналов с автоматической подстройкой по задержке с временным стробированием», поданной 22 января 2002 г., авторы Matthew Rabinowitz и James Spilker, уступленной компании Rosum Corporation, Редвуд-сити, Калифорния и полностью включенной в настоящий документ посредством ссылки. В указанных выше заявках описаны два способа, в которых используется множество цифровых телевизионных передатчиков в качестве известных опорных точек для определения местоположения терминала пользователя.
Таким образом, варианты осуществления настоящего изобретения подходят для того, чтобы позволить ценному передвижному объекту определить свое местоположение автономно или совместно с так называемыми «вспомогательными» системами. Когда ценный передвижной объект находится за пределами зоны покрытия системы беспроводной связи, он по-прежнему может определять свое местоположение при помощи вариантов осуществления настоящего изобретения.
На фиг.2 приведена схема системы 200 слежения за местоположением, используемой в соответствии с вариантами осуществления настоящего изобретения. Система 200 включает в себя ценный передвижной объект 201, который может быть соединен с запускающим компонентом 100 (не показан), системой (например, 202 или 203) определения местоположения и поставщиком 204 услуг по слежению за местоположением. Заметим, что ценный передвижной объект 201 может быть реализован самыми различными способами в соответствии с вариантами осуществления настоящего изобретения. Например, ценный передвижной объект 201 может состоять, в частности, из электронного устройства, такого как предмет испытательной аппаратуры или другой ценный контрольно-измерительный прибор, геодезический прибор, включающий в себя оптическое устройство, известное под названием электронный автоматический тахеометр, или геодезический прибор GPS, такой как выпускаемый компаниями Trimble Navigation Ltd., Leica или Topcon. Другие примеры включают в себя оснащенный двигателем, но передвижной (переносной) инструмент, автомобиль, трактор, машину для земляных работ, такую как бульдозер, экскаватор, скрепер или грузовой автомобиль для перевозки грунта. Дальнейшие примеры включают в себя бытовой прибор, груз любого рода, в том числе трейлеры и контейнеры для перевозки грузов, вычислительное устройство, суперкомпьютер, любой другой грузовой автомобиль, в том числе для перевозки топлива и химических веществ, или транспортное средство любого другого типа. В варианте осуществления, приведенном на фиг.2, ценный передвижной объект 201 может обладать способностью беспроводной связи с поставщиком 204 услуг. Когда ценный передвижной объект 201 перемещается, запускающий компонент 100 может обнаружить перемещение и может определить его географическое положение при помощи системы 202 определения местоположения или системы 203 определения местоположения.
В соответствии с вариантами осуществления настоящего изобретения система 202 определения местоположения является наземной системой определения местоположения. Существует множество наземных систем определения местоположения, которые могут использоваться вариантами осуществления настоящего изобретения, в том числе, в частности, LORAN-C, Decca, радиомаяки и т.п. Кроме того, настоящее изобретение подходит для использования будущих вариантов реализации наземных систем определения местоположения, например технологии определения местоположения Rosum.
Как показано на фиг.2, в других вариантах настоящего изобретения запускающий компонент 100 использует спутниковую систему 203 определения местоположения для определения местоположения. Существуют различные спутниковые системы определения местоположения, которые могут использоваться вариантами осуществления настоящего изобретения, в том числе, в частности, Система глобального позиционирования (GPS), дифференциальная GPS (DGPS), Eurofix DGPS, Глобальная навигационная спутниковая система (ГЛОНАСС), система Galileo и т.п. Кроме того, настоящее изобретение подходит для использования будущими вариантами реализации спутниковых систем определения местоположения.
Как описано выше, варианты осуществления настоящего изобретения могут определять положение ценного передвижного объекта 201 и затем сравнивать текущее положение передвижного объекта 201 с набором географических координат заданной зоны или маршрута. В зависимости от соотношения между текущим положением ценного передвижного объекта и заданной зоной запускающий компонент 100 может вырабатывать одну или несколько команд, вызывающих выполнение ценным передвижным объектом 201 одного или нескольких действий. Например, если ценный передвижной объект 201 без разрешения перемещается из заданной зоны или отклоняется от заданного маршрута, поставщику 204 услуг слежения за местоположением может быть послано в качестве уведомления беспроводное сообщение. В альтернативном варианте запускающий компонент 100 может вызвать испускание ценным передвижным объектом звукового сигнала до тех пор, пока пользователь не введет секретный код (например, при помощи устройства 115 ввода, изображенного на фиг.1). Хотя варианты осуществления на фиг.2 относятся к использованию запускающего компонента 100 совместно с поставщиком услуг по слежению за местоположением (например, поставщиком 204), настоящее изобретение подходит для использования в качестве автономного устройства. Иными словами, запускающий компонент 100 может использоваться для управления ценным передвижным объектом без взаимодействия с поставщиком 204 услуг по слежению за местоположением. Например, пользователь может просто пожелать, чтобы ценный передвижной объект выполнял определенные действия в зависимости от географической зоны, в которой он находится, но не сообщал об этом поставщику 204 услуг по слежению за местоположением.
На фиг.3 приведена схема 300 состояний, изображающая рабочие состояния запускающего компонента 100 в соответствии с вариантами осуществления настоящего изобретения. В рабочем состоянии S1 на фиг.3 запускающий компонент 100 находится в неактивном рабочем состоянии. В вариантах осуществления настоящего изобретения в случае, когда запускающий компонент находится в неактивном состоянии, единственными компонентами, потребляющими энергию, могут быть таймер реального времени процессора 101 и датчик 106 движения. Это позволяет запускающему компоненту 100 оставаться в рабочем состоянии, в котором потребляется минимальное количество энергии от батареи 117 или от ценного передвижного объекта (например, от объекта 201 на фиг.2), внутри которого расположен запускающий компонент 100 или с которым связан запускающий компонент 100. В вариантах осуществления настоящего изобретения в случае, когда запускающий компонент 100 находится в неактивном рабочем состоянии S1, потребляется всего 10 мкА. Поскольку в рабочем состоянии S1 разрядка батареи сведена к минимуму, промежуток между заменой батареи для батареи 117 или для ценного передвижного объекта 201 таким образом увеличивается. Это может быть важным для многих ценных переносных устройств 201, в которых сохранение срока службы батареи имеет первостепенное значение.
При наступлении события 301 на фиг.3 датчик 106 движения может обнаружить изменение состояния движения ценного передвижного объекта 201 и выработать сигнал прерывания, направляемый контроллеру (например, процессору 101 на фиг.1) запускающего компонента 100. Изменение состояния движения может быть началом или окончанием движения либо ускорением или замедлением запускающего компонента. В ответ на сигнал прерывания от датчика 106 движения процессор 101 вызывает переход запускающего компонента 100 в рабочее состояние S2. Рабочее состояние S2 является активным рабочим состоянием запускающего компонента 100, в котором запускающий компонент 100 может попытаться получить засечку местоположения своего текущего географического положения при помощи компонента 100 определения местоположения.
Когда запускающий компонент 100 успешно определяет свое местоположение в пределах заданного периода, он может автоматически попытаться отправить сообщение с «засечкой» поставщику 204 услуг, когда датчик 106 движения обнаруживает, что запускающий компонент 100 перемещается. Это позволяет поставщику 204 услуг отслеживать запускающий компонент 100 и тем самым ценный передвижной объект (например, объект 201), который контролируется запускающим компонентом 100, по мере его движения. Промежуток времени между засечками местоположения может быть определен заданным промежутком времени рабочего состояния S6 на фиг.3.
Заметим, что заданный промежуток времени для определения текущего положения запускающего компонента 100 может быть предустановленным значением, установленным пользователем запускающего компонента 100 или установленным поставщиком 204 услуг. Если запускающий компонент 100 не может определить свое местоположение в заданный промежуток времени, он может автоматически запустить передачу сообщения «нет засечки» поставщику 204 услуг по слежению за местоположением. Сообщение «нет засечки» сообщает поставщику 204 услуг, что запускающий компонент 100 обнаружил перемещение электронного устройства 201 и что его положение нельзя определить при помощи системы определения местоположения (например, системы 202 или 203) в пределах заданного промежутка времени. Однако в вариантах осуществления настоящего изобретения местоположение запускающего компонента 100 можно сверить с информацией об идентификаторе соты, содержащемся в SMS-сообщении «нет засечки», переданном поставщику 204 услуг во время нахождения в рабочем состоянии S4, или грубо определить методом триангуляции при помощи множества станций мобильной телефонной связи (например, сотовой связи).
В вариантах осуществления настоящего изобретения в случае, когда запускающий компонент находится в рабочем состоянии S2, процессор 101 и компонент 110 определения местоположения могут быть единственными компонентами, потребляющими энергию. В вариантах осуществления настоящего изобретения потребление тока в рабочем состоянии S2 оценивается как 70 мА, когда запускающий компонент определяет свое положение.
При наступлении события 302 на фиг.3 запускающий компонент 100 переходит в рабочее состояние S3. В соответствии с вариантами осуществления настоящего изобретения запускающий компонент 100 после успешного определения своего положения переходит из рабочего состояния S2 в рабочее состояние S3. В альтернативном варианте запускающий компонент 100 автоматически переходит в рабочее состояние S3, если промежуток 308 времени истек до того, как датчик 106 движения обнаруживает перемещение. Промежуток 308 времени может быть значением, установленным по умолчанию, заданным параметром, установленным пользователем запускающего компонента 100 или установленным поставщиком 204 услуг.
Если запускающий компонент 100 успешно определил свое положение при помощи компонента 110 определения местоположения, он может затем определить, какое действие должно быть запущено, в зависимости от заданных условий (например, текущего времени и (или) местоположения) в рабочем состоянии S3. Например, можно обратиться к базе данных в устройстве 105 хранения данных, которая описывает заданные действия, которые следует предпринять в зависимости от текущего времени и (или) географического положения запускающего компонента 100. Так, когда ценный передвижной объект 201 входит в зону, определяющую аэропорт, заданным действием может быть выработка сигнала для запуска подпрограммы отключения передвижного объекта 201. Когда ценный передвижной объекта 201 покидает зону, определяющую аэропорт, запускающий компонент может выработать сигнал для запуска или включения передвижного объекта 201 вновь.
Кроме того, запускающий компонент 100 может быть выполнен с возможностью выполнять различные действия в зависимости от того, в какой зоне находится в настоящее время ценный передвижной объект, изображенный на фиг.3. Например, если запускающий компонент 100 используется для управления ноутбуком, пользователь может сконфигурировать варианты осуществления настоящего изобретения таким образом, чтобы запускалось определенное программное приложение (например, приложение электронной таблицы), когда ноутбук оказывается в окрестности рабочего места пользователя, и запускалось другое программное приложение (например, приложения броузера Интернета), когда ноутбук оказывается в окрестности дома пользователя.
Как указывалось выше, действие, запущенное вариантами осуществления настоящего изобретения, может также определяться текущим положением в сочетании с текущим временем. Так, варианты осуществления настоящего изобретения могут быть выполнены с возможностью запуска одного действия при нахождении в данном месте в определенное время и запуска второго действия при нахождении в том же месте, но в другое время.
Как показано на фиг.3, в рабочем состоянии S3 процессор 101 может определить, какое действие следует предпринять в ответ на заданные условия (например, текущее время и (или) текущее положение) запускающего компонента 100. Запускающий компонент 100 может затем выработать один или несколько команд для управления ценным передвижным объектом 201 в зависимости от заданных условий (например, текущего времени и (или) географического положения). Кроме того, таймер реального времени процессора 100 может быть обновлен посредством информации о времени, полученной компонентом 110 определения местоположения во время рабочего состояния S2. Далее, во время рабочего состояния S3 могут быть проверены рабочие параметры запускающего компонента 100. Например, может быть проверено состояние батареи 117, чтобы определить, не потребуется ли в скором времени замена батареи. Другие параметры могут включать в себя продолжительность промежутка 308 времени, интервал времени для успешного определения текущего географического положения запускающего компонента 100 (например, во время рабочего состояния S2), текущую версию программного обеспечения запускающего устройства 100 и (или) текущую версию базы данных с заданными географическими зонами и т.д.
При наступлении события 303 на фиг.3 запускающий компонент 100 может перейти в рабочее состояние S4. В соответствии с вариантами осуществления настоящего изобретения запускающий компонент 100 после успешного определения, какое действие должно быть запущено в зависимости от заданных условий, переходит в рабочее состояние S3 из рабочего состояния S2. В рабочем состоянии S4 запускающий компонент 100 пытается передать данные поставщику 204 услуг по слежению за местоположением. Например, запускающий компонент 100 может попытаться передать текущее время и географическое положение ценного передвижного объекта 201 поставщику 204 услуг по слежению за местоположением при помощи компонента 107 беспроводной связи. Может быть послана дополнительная информация, включающая в себя тип изменения состояния движения запускающего компонента 100. Например, сообщение может указывать, что было начато или прекращено перемещение запускающего компонента 100. В альтернативном варианте в случае если заданный промежуток времени истечет до того, как запускающий компонент 100 успешно определит свое положение (например, во время рабочего состояния S2), запускающий компонент 100 может передать сообщение поставщику 204 услуг с указанием, что ценный передвижной объект 201 переместился, но не смог определить свое местоположение при помощи компонента 110 определения местоположения.
Кроме того, сообщения о засечках или отсутствии засечек могут содержать дополнительную информацию, такую как состояние батареи и текущие рабочие параметры ценного передвижного объекта 201. Направляя информацию о состоянии батареи, варианты осуществления настоящего изобретения сокращают объем технического обслуживания, которое необходимо выполнить пользователю для обеспечения надлежащей работы ценного передвижного объекта 201. Например, поставщик 204 услуг по слежению за местоположением может направить пользователю сообщение с напоминанием о замене батарей в передвижном объекте 201, когда определяет, что батарея скоро разрядится. В одном варианте осуществления настоящего изобретения на мобильный телефон 205 пользователя (например, на сотовый телефон) может быть отправлено текстовое сообщение, или на домашний или служебный компьютер 206 пользователя может быть отправлено сообщение электронной почты с напоминанием о замене батарей передвижного объекта 201. Кроме того, поставщик 204 услуг по слежению за местоположением может определять, следует ли отправить запускающему компоненту 100 обновленную базу данных заданной географической зоны.
В вариантах осуществления настоящего изобретения в случае, когда поставщик 204 услуг принимает от запускающего компонента 100 сообщение о засечках местоположения, он сравнивает данные в сообщении с набором заданных параметров местоположения (например, установленных пользователем) ценного передвижного объекта. Если местоположение передвижного объекта 201 находится за пределами заданных параметров местоположения, пользователю и (или) правоохранительным органам может быть послано сообщение о том, что ценный передвижной объект 201 перемещен за пределы разрешенных параметров местоположения. Кроме того, поставщик 204 услуг может сообщить местоположение ценного передвижного объекта 201, например, правоохранительным органам с тем, чтобы способствовать возврату устройства. Кроме того, во время рабочего состояния S4 поставщик 204 услуг может изменить рабочие параметры запускающего компонента так, чтобы засечки местоположения отправлялись чаще, чтобы способствовать возврату имущества 201, за которым осуществляется слежение. Поставщик 204 услуг может отправить ценному передвижному объекту 201 команду, вызывающую выполнение объектом определенного действия. Например, поставщик 204 услуг может отправить подвижному объекту 201 команду, вызывающую его отключение до тех пор, пока его не возвратят или пока не будет введен секретный код.
Например, когда пользователь еще только становится абонентом услуг по слежению за местоположением, предоставляемым поставщиком 204 услуг, его могут спросить, не хочет ли он пользоваться геоограждением. Пользователь может сообщить географические координаты зон (или маршрутов) для ценного передвижного объекта 201, которые представляют для него интерес и которые задают область или области, в которых передвижному объекту 201 разрешено перемещаться, не передавая предупреждающее сообщение пользователю, и, опционально, промежуток или промежутки времени, в которые подвижному объекту 201 разрешено находиться в этих областях. Пользователь может также задать одно или несколько действий, которые должны быть запущены процессором 101, если ценный передвижной объект 201 входит в одну из заданных зон или маршрутов или покидает их. Если, например, ценный подвижный объект 201 перемещается за пределы этого местоположения, области, зоны или маршрута, поставщик 204 услуг связывается с пользователем и (или) с правоохранительными органами и сообщает им о наличии несанкционированного перемещения ценного передвижного объекта 201. Поставщик 204 услуг может отправить текстовое сообщение на мобильный телефон 105 пользователя (например, на сотовый телефон), сообщение электронной почты на компьютер 106 пользователя и т.д. Как описано выше, поставщик 204 услуг может послать команды, которые изменяют рабочие параметры запускающего компонента 100, которые вызывают отправку им более частых сообщений о местоположении в случае, когда обнаружено несанкционированное перемещение имущества 201, с целью способствовать возврату передвижного объекта 201.
Кроме того, запускающий компонент может отправлять информацию об эксплуатационном состоянии во время рабочего состояния S4. Это позволяет поставщику 204 услуг следить за эксплуатационным состоянием ценного передвижного объекта 201 и сообщать о нем своему пользователю. Например, запускающий компонент может сообщать поставщику 204 услуг о неисправностях, связанных с ценным передвижным объектом 201, которые могут быть переправлены его пользователю и (или) соответствующей ремонтной организации. Поставщик 204 услуг может отправить пользователю ценного передвижного объекта 201 и (или) соответствующей ремонтной организации сообщение электронной почты или другое сообщение, касающееся неисправностей, связанных с передвижным объектом 201. В альтернативном варианте запускающий компонент 100 может использовать просмотровую таблицу (или таблицу событий) для определения наступления какого-либо из указанных в ней событий или режима, связанного с ценным передвижным объектом 201. Таким образом, просмотровая таблица может включить функцию отправки сообщения у запускающего компонента 100. Заметим, что большое количество событий или режимов, связанных с ценным передвижным объектом 201, может быть включено в качестве составной части в просмотровую таблицу (или в таблицу событий). Кроме того, запускающий компонент 100 может сообщить о состоянии батарей ценного передвижного объекта 201 и сообщить своему пользователю о необходимости замены батарей. Например, поставщик услуг может отправить пользователю ценного передвижного объекта 201 сообщение электронной почты или другое сообщение с напоминанием о необходимости замены батарей в устройстве. В вариантах осуществления настоящего изобретения во время рабочего состояния S4 энергию может потреблять только компонент 107 беспроводной связи. По оценкам, в вариантах осуществления настоящего изобретения запускающий компонент 100 потребляет приблизительно 400 мА при передаче своего местоположения в рабочем состоянии S4.
При наступлении события 304 на фиг.3 запускающий компонент 100 переходит в рабочее состоянии S5 после того, как запускающий компонент 100 смог успешно передать данные во время рабочего состояния S4. В рабочем состоянии S5 запускающий компонент находится в состоянии запроса и может принимать команды и рабочие параметры от поставщика 204 услуг. Кроме того, на этот раз могут быть приняты команды для изменения рабочих параметров запускающего компонента 100. Например, во время рабочего состояния S5 может быть изменен промежуток времени, в течение которого компоненту 110 определения местоположения позволено определять местоположение запускающего компонента 100. Другие параметры могут включать в себя базу данных, определяющую заданные географические зоны, для запуска действия и (или) действия, которое надлежит предпринять при входе в одну из заданных географических зон или при выходе из нее. Хотя настоящий вариант осуществления относится к конкретным параметрам, настоящее изобретение подходит для приема команд, запускающих различные действия при нахождении в рабочем состоянии S5. В одном варианте осуществления в случае, когда запускающий компонент находится в рабочем состоянии S5, энергию может потреблять только компонент 107 беспроводной связи. Опять-таки, это снижает количество энергии, потребляемой от батарей 117 питания запускающего компонента 100 (или от батарей питания ценного передвижного объекта), тем самым продлевается срок службы батарей. По оценкам, в вариантах осуществления настоящего изобретения запускающий компонент 100 при нахождении в рабочем состоянии S5 потребляет приблизительно 5 мА энергии.
При наступлении события 305, после завершения связи с поставщиком 204 услуг по слежению за местоположением, запускающий компонент переходит в рабочее состояние S6. В альтернативном варианте при наступлении события 306 запускающий компонент 100 переходит в рабочее состояние S6 по истечении заданного временного интервала, в котором запускающий компонент 100 не смог успешно передать данные во время рабочего состояния S4.
Как показано на фиг.3, рабочее состояние S6 может быть состоянием ожидания, в котором запускающий компонент 100 может быть принужден (или вынужден) оставаться неактивным в течение заранее заданного или заранее определенного промежутка времени. Тем самым можно установить временной интервал между последовательными засечками местоположения и помешать запускающему компоненту 100 потреблять чрезмерное количество энергии батареи от своей батареи 117 (или от батареи передвижного объекта 201) в попытке постоянно определять свое положение при нахождении в состоянии перемещения. В вариантах осуществления настоящего изобретения запускающий компонент 100 может потреблять всего 10 мкА энергии при нахождении в рабочем состоянии S6. Заранее заданный или заранее определенный промежуток времени может быть рабочим параметром, который может быть значением, установленным по умолчанию, установленным пользователем запускающего компонента 100 или поставщиком 204 услуг во время рабочего состояния S5.
Продолжительность заранее заданного или заранее определенного промежутка времени нахождения в рабочем состоянии S6 может быть изменена во время рабочего состояния запроса (например, S5) в результате приема рабочих параметров от поставщика 204 услуг. В одном варианте осуществления в случае, если поставщик 204 услуг определяет, что происходит несанкционированное перемещение запускающего компонента 100, продолжительность промежутка времени нахождения в рабочем состоянии S6 может быть изменена во время рабочего состояния S5, чтобы вызвать непрерывную или более частую отправку (или выдачу) запускающим компонентом 100 своего местоположения поставщику 204 услуг. Это облегчает определение местоположения и возврат устройства 201, в котором расположен или с которым связан запускающий компонент 100. После истечения заранее заданного (или заранее определенного) промежутка времени нахождения в рабочем состоянии S6 в момент события 307 запускающий компонент 100 вновь входит в рабочее состояние S1, после чего запускающий компонент 100 может повторить процесс, если датчик 106 движения обнаруживает перемещение ценного передвижного объекта 201.
На фиг.4 изображена блок-схема способа 400 управления ценным передвижным объектом в соответствии с вариантами осуществления настоящего изобретения. Способ 400 включает в себя процессы вариантов осуществления настоящего изобретения, которые могут быть выполнены процессором (процессорами) и электрическими компонентами, находящимися под управлением команд (или кода), считываемых и выполняемых вычислительным устройством. Команды (или код), считываемые и выполняемые вычислительным устройством, могут находиться, например, в устройствах хранения данных, таких как энергозависимая память, энергонезависимая память и (или) устройство хранения больших массивов данных. Однако команды (или код), считываемые и выполняемые вычислительным устройством, могут находиться в носителе любого типа, считываемом вычислительным устройством. Хотя в способе 400 раскрыты определенные этапы, такие этапы приведены в качестве примера. Иными словами, способ 400 может не включать в себя все этапы, изображенные на фиг.4. Или же способ 400 может включать в себя различные другие этапы и (или) модификации этапов, приведенных на фиг.4. Следует заметить, что каждый из этапов способа 400 может быть выполнен программным образом, встроенными программами, аппаратным образом или любым их сочетанием.
На этапе 410 можно определить, было ли обнаружено какое-либо движение ценного перемещаемого объекта (например, объекта 201 на фиг.2). Если нет, то способ 400 переходит к началу этапа 410. Однако если на этапе 400 определено, что было обнаружено движение ценного передвижного объекта, способ 400 переходит к этапу 420. Заметим, что обнаружение какого-либо движения ценного перемещаемого объекта может быть реализовано различными способами в соответствии с вариантами осуществления настоящего изобретения. Например, перемещение ценного передвижного объекта может быть обнаружено при помощи запускающего устройства (например, устройства 100 на фиг.1), которое расположено внутри ценного передвижного объекта или связано с ним. Согласно вариантам осуществления настоящего изобретения запускающее устройство может включать в себя компонент определения движения (например, компонент 106) и контроллер (например, процессор 101). С контроллером может быть соединен датчик движения. Датчик 106 движения предназначен для обнаружения изменений в состоянии движения запускающего устройства 100. Например, датчик 106 движения может обнаружить, когда запускающий компонент 100 переходит из практически неподвижного состояния в движущееся состояние. Датчик 106 движения может также обнаруживать, когда запускающий компонент 100 переходит из движущегося состояния в практически неподвижное состояние, и (или) обнаруживать любые изменения в скорости перемещения запускающего компонента.
Заметим, что соединение компонента определения движения, который обнаруживает движение, с запускающим компонентом 100 является новым способом снижения потребления энергии батареи или энергии батареи ценного передвижного объекта, поскольку он позволяет запускающему компоненту 100 следить за местоположением передвижного объекта 201, потребляя при этом минимальное количество энергии, когда движение отсутствует. В вариантах осуществления настоящего изобретения в случае, когда запускающий компонент находится в неактивном рабочем состоянии, потреблять энергию могут только таймер реального времени контроллера 101 и датчик 106 движения. Заметим, что запускающий компонент может быть выполнен таким образом, что он не делает попыток определить свое географическое положение, если датчик 106 движения не обнаруживает изменение в состоянии движения ценного передвижного объекта 201. Таким образом, минимизируется число засечек местоположения, необходимых для контроля положения ценного передвижного объекта, и снижается энергопотребление.
На этапе 420 на фиг.4 может быть определено географическое положение ценного передвижного объекта в ответ на обнаружение движения. Заметим, что этап 420 может быть реализован различными способами. В одном варианте осуществления датчик 106 движения обнаруживает вибрацию, связанную с движением ценного передвижного объекта, в котором расположен (или с которым связан) запускающий компонент 100, и сообщает об этом перемещении процессору 101, когда обнаруживается изменение движения. В вариантах осуществления настоящего изобретения процессор 101 может автоматически вызвать определение компонентом определения местоположения (например, компонентом 110 на фиг.1) географического положения ценного передвижного объекта 201 в ответ на прием прерывания от датчика 106 движения. В вариантах осуществления настоящего изобретения для определения географического положения ценного передвижного объекта 201 может использоваться наземная или космическая система определения местоположения. Кроме того, обработка данных для определения географического положения ценного передвижного объекта 201 может выполняться процессором 201 или совместно с удаленно расположенным сервером или компьютером (например, поставщиком 204 услуг на фиг.2).
На этапе 430 определяется, находится ли географическое положение, определенное на этапе 420, в пределах заданной зоны (или района, области или маршрута). Если не находится, то способ 400 переходит к этапу 410. Однако если на этапе 430 определено, что географическое положение ценного передвижного объекта находится в пределах заданной зоны, способ 400 переходит к этапу 440. Заметим, что этап 430 может быть реализован различными способами. Например, в вариантах осуществления настоящего изобретения текущее местоположение ценного передвижного объекта может сравниваться с географическими координатами, которые определяют зону, район, область или маршрут. Эти координаты могут храниться в памяти (например, в устройстве 105 хранения данных на фиг.1), соединенной с процессором 101, или храниться в удаленном месте (например, у поставщика 204 услуг на фиг.4).
На этапе 440 на фиг.4 может вырабатываться одна или несколько команд для управления ценным передвижным объектом. В вариантах осуществления настоящего изобретения может вырабатываться одна или несколько команд (например, процессором 101) для управления ценным передвижным объектом 201 в зависимости от соотношения между текущим географическим положением ценного передвижного объекта 201 (определенного на этапе 420) и географическими координатами, задающими определенную зону. Кроме того, могут быть выработаны различные команды в зависимости от соотношения между текущим положением передвижного объекта 201 и определенной заданной зоной (или областью, или маршрутом). Например, когда ценный передвижной объект 201 находится в пределах данной заранее определенной зоны, может быть выработана первая команда для управления передвижным объектом 201. Когда ценный передвижной объект 201 перемещается за пределы этой зоны, может быть выработана другая команда для управления передвижным объектом 201.
На фиг.5 приведена блок-схема способа 500 для управления энергопотреблением в ценном передвижном объекте в соответствии с вариантами осуществления настоящего изобретения. Способ 500 включает в себя процессы вариантов осуществления изобретения, которые могут быть выполнены процессором (процессорами) и электрическими компонентами под управлением команд (или кода), считываемых и выполняемых вычислительным устройством. Команды (или код), считываемые и выполняемые вычислительным устройством, могут находиться, например, в устройствах хранения данных, таких как энергозависимая память, энергонезависимая память и (или) устройство хранения больших массивов данных. Однако команды (или код), считываемые и выполняемые вычислительным устройством, могут находиться на носителе любого типа, считываемом вычислительным устройством. Хотя в способе 500 раскрыты конкретные этапы, такие этапы приведены в качестве примера. Иными словами, способ 500 может не включать в себя все этапы, приведенные на фиг.5. Или же способ 500 может включать в себя различные другие этапы и (или) модификации этапов, приведенных на фиг.5. Следует заметить, каждый из этапов способа 500 может быть выполнен программным образом, встроенными программами, аппаратным образом или любым их сочетанием.
На этапе 510 может быть обнаружено перемещение ценного перемещаемого объекта при помощи компонента обнаружения движения, соединенного с передвижным объектом. Согласно вариантам осуществления настоящего изобретения компонент обнаружения движения (например, компонент 106 на фиг.1) соединен с контроллером (например, с процессором 101), который может быть соединен с ценным передвижным объектом (например, объектом 201), в том числе, в частности, с трактором, грузом любого типа, электронным устройством любого типа, мобильным телефоном, сотовым телефоном, переносным вычислительным устройством, самоходной электрической системой и т.п. В вариантах осуществления изобретения датчик 106 движения может быть частью запускающего компонента (например, компонента 100), который соединен с ценным передвижным объектом 201. Датчик 106 движения может быть предназначен для обнаружения изменения состояния движения запускающего компонента 100. Например, датчик 106 движения может обнаруживать, когда запускающий компонент 100 переходит из практически неподвижного состояния в движущееся состояние. Датчик 106 движения может также обнаруживать, когда запускающий компонент переходит из движущегося состояния в практически неподвижное состояние, и (или) изменение скорости перемещения запускающего компонента 100. Таким образом, датчик 106 движения может обнаруживать, когда ценный перемещаемый объект 201 переходит от практически неподвижного состояния в движущееся состояние. Датчик 106 движения может также обнаруживать, когда ценный перемещаемый объект 201 переходит из движущегося состояния в практически неподвижное состояние, и (или) изменение скорости перемещения ценного перемещаемого объекта 201.
Связь компонента обнаружения движения, который обнаруживает движение, с запускающим компонентом 100 является новым способом снижения энергопотребления от своей батареи 117 питания или от батареи питания ценного передвижного объекта 201, поскольку он позволяет запускающему компоненту 100 контролировать положение ценного перемещаемого объекта 201, потребляя минимальное количество энергии при отсутствии перемещения. В вариантах осуществления настоящего изобретения в случае, когда запускающий компонент 100 находится в неактивном рабочем состоянии, энергию могут потреблять только таймер реального времени контроллера 101 и датчик 106 движения. Заметим, что запускающий компонент может не пытаться определять свое географическое положение, если датчик 106 движения не обнаруживает изменения в состоянии движения ценного передвижного объекта. Таким образом минимизируется число засечек местоположения для контроля положения ценного передвижного объекта 201 и может быть снижено энергопотребление. В вариантах осуществления настоящего изобретения датчик 106 движения может быть реализован, в частности, в виде датчика ускорения, датчика наклона, датчика вращения, гироскопа и т.д.
На этапе 520 на фиг.5 о перемещении сообщается контроллеру. В вариантах осуществления настоящего изобретения в случае, когда датчик 106 движения обнаруживает перемещение запускающего компонента 100, он сообщает (например, вырабатывает сигнал прерывания) об этом перемещении контроллеру (например, процессору 101).
На этапе 530 в ответ на это сообщение может вырабатываться одна или несколько команд для управления ценным передвижным объектом. Например, в ответ на сигнал прерывания процессор 101 может включить другие компоненты запускающего компонента 100, такие как компонент 107 беспроводной связи и компонент 110 определения местоположения. Географическое положение запускающего компонента 100 может быть определено при помощи компонента 110 определения местоположения. Процессор 101 может сравнить текущее географическое положение с географическими координатами, которые определяют заданную зону (или район, область или маршрут). Координаты заданной зоны могут находиться в энергозависимой памяти 104 и (или) в устройстве 105 хранения данных. На основе этого сравнения процессор может вызвать выработку управляющим элементом 113 команды для управления ценным передвижным объектом, в котором находится или с которым связан запускающий компонент 100.
В альтернативном варианте процессор 101 может сам выработать команду (команды) для управления ценным передвижным объектом. Например, запускающий компонент 100 может быть выполнен с возможностью выработки одной или нескольких команд, вызывающих отключение ценного передвижного объекта, когда объект входит в зону с установленными ограничениями, такую как кинотеатр или проход, ведущий из зала вылета к самолету при посадке на него. Поскольку запускающий блок 100 может быть запрограммирован таким образом, чтобы автономно выполнять эту функцию отключения, он может выполнять это и в отношении объектов, которые могут храниться в багаже, осуществляя еще одну ценную услуг по прекращению разряда батарей при нахождении в месте, где объект нельзя использовать. Когда ценный перемещаемый объект перемещается за пределы зоны с установленными ограничениями, процессор 101 может выработать сигнал, вызывающий включение передвижного объекта. Это может быть очень удобно для пользователей, которые могут забыть отключить свой ценный передвижной объект при входе в зону с установленными ограничениями или включить его вновь при выходе из зоны с установленными ограничениями.
На фиг.6 приведена блок-схема способа 600 для управления ценным передвижным объектом в соответствии с вариантами осуществления настоящего изобретения. Способ 600 включает в себя процессы вариантов осуществления изобретения, которые могут быть выполнены процессором (процессорами) и электрическими компонентами, находящимися под управлением команд (или кода), считываемых и выполняемых вычислительным устройством. Команды (или код), считываемые и выполняемые вычислительным устройством, могут находиться, например, в устройствах хранения данных, таких как энергозависимая память, энергонезависимая память и (или) устройство хранения больших массивов данных. Однако команды (или код), считываемые и выполняемые вычислительным устройством, могут находиться в носителе любого типа, считываемом вычислительным устройством. Хотя в способе 600 раскрыты определенные этапы, такие этапы приведены в качестве примера. Иными словами, способ 600 может не включать в себя все этапы, изображенные на фиг.6. Или же способ 600 может включать в себя различные другие этапы и (или) модификации этапов, приведенных на фиг.6. Следует заметить, что каждый из этапов способа 600 может быть выполнен программным образом, встроенными программами, аппаратным образом или любым их сочетанием.
На этапе 610 можно обнаружить перемещение ценного передвижного объекта (например, объекта 201). Заметим, что этап 610 может быть реализован различными способами. Например, компонент обнаружения движения (например, компонент 106), соединенный с ценным передвижным объектом, может использоваться для обнаружения любого перемещения ценного передвижного объекта. Согласно вариантам осуществления настоящего изобретения компонент обнаружения движения может быть соединен с контроллером (например, с процессором 101), который может быть соединен с ценным передвижным объектом. Ценный передвижной объект может быть реализован любым способом, описанным в настоящем документе, но не только этими способами. В вариантах осуществления изобретения датчик движения (например, датчик 106) может быть составной частью запускающего компонента устройства (например, компонента 100), которое соединено с ценным передвижным объектом. Заметим, что датчик движения может быть предназначен для обнаружения изменений в состоянии движения ценного передвижного объекта. Например, датчик движения может обнаруживать, когда ценный передвижной объект переходит от практически неподвижного состояния к движущемуся состоянию. Датчик движения может также обнаруживать, когда ценный передвижной объект переходит от движущегося состояния к практически неподвижному состоянию, и (или) изменения в скорости перемещения ценного передвижного объекта.
Соединение компонента обнаружения движения, который обнаруживает движение, с запускающим компонентом 100 является новым способом снижения энергопотребления для его батареи 117 питания или батареи питания ценного передвижного объекта 201, поскольку это позволяет запускающему компоненту 100 контролировать положение ценного передвижного объекта 201 и потреблять при этом минимальное количество энергии во время отсутствия перемещения. В вариантах осуществления настоящего изобретения в случае, когда запускающий компонент 100 находится в неактивном рабочем состоянии, энергию могут потреблять только таймер реального времени контроллера 101 и датчик 106 движения. Заметим, что запускающий компонент 101 может не пытаться определять свое географическое положение, если датчик 106 движения не обнаруживает изменение в состоянии движения ценного передвижного объекта 201. Таким образом, минимизируется число засечек местоположения для контроля положения ценного передвижного объекта 201 и может быть снижено энергопотребление. В вариантах осуществления настоящего изобретения датчик 106 движения может быть выполнен, в частности, в виде датчика ускорения, датчика наклона, датчика вращения, гироскопа, датчика движения и т.д.
На этапе 620 на фиг.6 о перемещении ценного передвижного объекта может быть сообщено контроллеру. В вариантах осуществления настоящего изобретения в случае, когда датчик 106 движения обнаруживает перемещение ценного передвижного объекта (и (или) запускающего компонента 100), он может на этапе 620 сообщить (например, выработать сигнал прерывания) об этом перемещении контроллеру (например, процессору 101).
На этапе 630 контроллер может включить другие компоненты в ответ на сообщение о перемещении, связанное с ценным перемещаемым объектом. Следует иметь в виду, что этап 630 может быть выполнен различными способами. Например, контроллер (например, процессор 101) может включить другие компоненты запускающего компонента (например, компонента 100), такие как компонент беспроводной связи (например, компонент 107) и компонент определения местоположения (например, 110).
На этапе 640 на фиг.6 можно определять, произошло ли одно или несколько заданных событий из просмотровой таблицы, пока вновь включенный компонент находится в неактивном или ждущем состоянии. Если не произошло, способ 600 завершается. Однако если на этапе 640 определено, что произошло одно или несколько заданных событий из просмотровой таблицы, способ 600 переходит к этапу 650.
Следует иметь в виду, что этап 640 может быть реализован различными способами. Например, контроллер (например, процессор 101) может определить, произошло ли одно или несколько заданных событий из просмотровой таблицы или таблицы событий, пока вновь включенный компонент находится в неактивном состоянии. Например, одно из таких «событий», которое может быть включено в просмотровую таблицу, заключается в том, чтобы определить, нет ли каких-либо неисправностей, связанных с ценным передвижным объектом. Если неисправности имеются, контроллер может использовать вновь включенный компонент беспроводной связи для передачи беспроводного сообщения о наличии неисправностей и может также потребовать помощь, связанную с этой неисправностью. В альтернативном варианте просмотровая таблица может включать в себя «событие», определяющее географическое положение ценного передвижного объекта (или запускающего компонента 100) при помощи компонента 110 определения местоположения. Другое «событие» просмотровой таблицы может включать в себя определение, находится ли текущее географическое положение ценного передвижного объекта (или запускающего компонента 100) в пределах заданной зоны (или района, области или маршрута). Заданная зона может быть определена географическими координатами, которые могут находиться в энергозависимой памяти 104 и (или) в устройстве 105 хранения данных. Еще одно «событие» из просмотровой таблицы может заключаться в том, что ценный передвижной объект (или запускающее устройство 100) перемещается, когда он не должен перемещаться. Другое «событие» из просмотровой таблицы может заключаться в том, что ценный передвижной объект (или запускающий компонент 100) не перемещается, когда он должен перемещаться.
На этапе 650 контроллер может сообщить о наступлении одного или нескольких событий или режимов из просмотровой таблицы (или таблицы событий). Таким образом, события или режимы из просмотровой таблицы вызывают сообщение об их наступлении. Заметим, что этап 650 может быть реализован различными способами. Например, контроллер может использовать вновь включенный компонент беспроводной связи (например, компонент 107) для отправки беспроводного сообщения поставщику услуг (например, поставщику 204), чтобы сообщить о наступлении одного или нескольких событий или режимов из просмотровой таблицы. Поставщик услуг может затем переправить сообщение пользователю ценного передвижного объекта или любой другой организации (например, правоохранительному органу, ремонтной организации и т.п.). В вариантах осуществления настоящего изобретения может быть послано текстовое сообщение на мобильный телефон пользователя (например, на телефон 205) или сообщение электронной почты на домашний или служебный компьютер пользователя (например, на компьютер 206), которое описывает или перечисляет наступление одного или нескольких событий или режимов из просмотровой таблицы.
На этапе 660 на фиг.6 может вырабатываться одна или несколько команд для управления ценным передвижным объектом. В вариантах осуществления настоящего изобретения может вырабатываться одна или несколько команд для управления ценным передвижным объектом в зависимости от наступления одного или нескольких событий из просмотровой таблицы. Например, когда ценный передвижной объект (например, объект 201) находится в пределах данной заданной зоны или маршрута, может быть выработана первая команда для управления передвижным объектом. Когда ценный передвижной объект (например, объект 201) перемещается за пределы этой зоны или маршрута, может быть выработана другая команда для управления передвижным объектом. Заметим, что одна или несколько команд, вырабатываемых для управления ценным передвижным объектом, могут быть реализованы любым образом, аналогичным описанному в настоящем документе, но не только таким образом. После завершения этапа 660 способ 600 может быть завершен.
Варианты осуществления в соответствии с изобретением могут быть получены любым сочетанием способов 400, 500 и 600. Кроме того, можно объединить два или более этапов способов 400, 500 и 600 для получения вариантов осуществления в соответствии с настоящим изобретением.
Заметим, что ценный передвижной объект, упомянутый в связи с вариантами изобретения, может быть выполнен различными способами. Например, ценный передвижной объект может быть выполнен, в частности, в виде грузового автомобиля с прицепом Caterpillar®, такого как трехосевые модели 725, 730, 735, 740 и 740 Ejector; погрузчик типа обратная лопата Caterpillar, такой как модели с центральным шарниром 416D, 420D, 430D, 446В и 446D или модели с центральным шарниром с комплексной базовой машиной 420D IT и 430D IT; холодный планировщик Caterpillar, такой как модель РМ-565В; уплотнитель грунта Caterpillar, такой как модели для почвы 815F и 825G Series II, модели для трамбовки мусора 816F, 826G Series II и 836G и модели для уплотнения почвы с вибрацией СР-323С, СР-433Е, СР-533Е, СР-563Е, СР-633Е и CS-323C; лесовоз Caterpillar, такой как модели 320С FM, 322C FM, 325C FM и 330С FM; экскаватор с передней лопатой Caterpillar, такой как модели 5090В, 5130В FS1 и 5230В FS; гидравлический экскаватор Caterpillar, такой как мини-модели 301.5, 301.6, 301.8, 302.5, 303 CR1, 304 CR и 305 CR и малые модели 307С, 307С SB, 308C CR, 311C CR, 311 С Utility и 312С L; манипулятор Caterpillar, такой как гусеничные модели 320С МН, 325C МН, 330С МН, 345В МН Series II, 365В МН и 375 МН и колесные модели М318 МН, М320 МН, М325С L МН и W345B Series II МН; автогрейдер Caterpillar, такой как модели 120Н Global, 12H Global, 135H Global, 140H Global, 14H Global и 160Н Global и полноприводные модели 143Н Global, 143H, 163Н Global и 163Н1 и шахтная модель 16Н; землепогрузчик Caterpillar, такой как модели 247В, 257В, 267В, 277В и 287В; трактор повышенной проходимости Caterpillar, такой как модели 776D и 784С; грузовой автомобиль повышенной проходимости Caterpillar, такой как модели 769D1, 773Е, 775Е и 777D, карьерные модели 771D и 775D и модели горнодобывающих грузовых автомобилей 785С, 789С и 793С; асфальтобетоноукладочное оборудование Caterpillar, такое как модели асфальтоукладчиков АР-1000В, АР-800С, АР-900В, BG-230, BG-240C и BG-260C и модели гусеничных асфальтоукладчиков АР-1050В, АР-650В, BG-225C и BG-245С; трубоукладчик Caterpillar, такой как средние модели 561N и 572R Series II и крупные модели 583R и 589; машина для восстановления дорог Caterpillar, такая как модели RM-250C и RM-350B; колесный тракторный скрепер Caterpillar, такой как подъемные модели 613С Series II, 615С Series II и 623G, модели с угольным ковшом 637Е Series II и 657Е и модели с открытым ковшом 621G, 627G, 631G и 637G; погрузочная машина с задней разгрузкой ковша Caterpillar, такая как модели 216В, 226В, 232В, 236В, 242В, 246В, 248В, 252В, 262В и 268В; стабилизатор грунта Caterpillar, такой как модели RM-350B и SS-250B; дистанционный манипулятор Caterpillar, такой как модели ТН220В, ТН330В, ТН340В, ТН350В и TH560B; гусеничный погрузчик Caterpillar, такой как малая модель 939С Hystat, средняя модель 953С1, большие модели 963С и 973С и модели для систем обработки отходов 953С WH, 963С WM и 973С WH; гусеничный трактор Caterpillar, такой как малые модели D3G, D4G и D5G, средние модели D5N, D6N, D6N FA, D6R Series II и D7R Series II и большие модели D10R, D11R и D11R CD; и колесный бульдозер Caterpillar, такой как средние модели 814F, 824G Series II и 834G и большие модели 844 и 854G.
Вышеприведенные описания частных вариантов осуществления были представлены с целью иллюстрации и описания. Они не должны считаться исчерпывающими или ограничивать изобретение конкретными раскрытыми формами, и очевидно, что в свете представленных сведений возможны многочисленные модификации и видоизменения. Хотя изобретение описано посредством частных вариантов осуществления, следует понимать, что изобретение не должно толковаться как ограниченное такими вариантами, а должно толковаться в соответствии с нижеприведенной формулой изобретения.
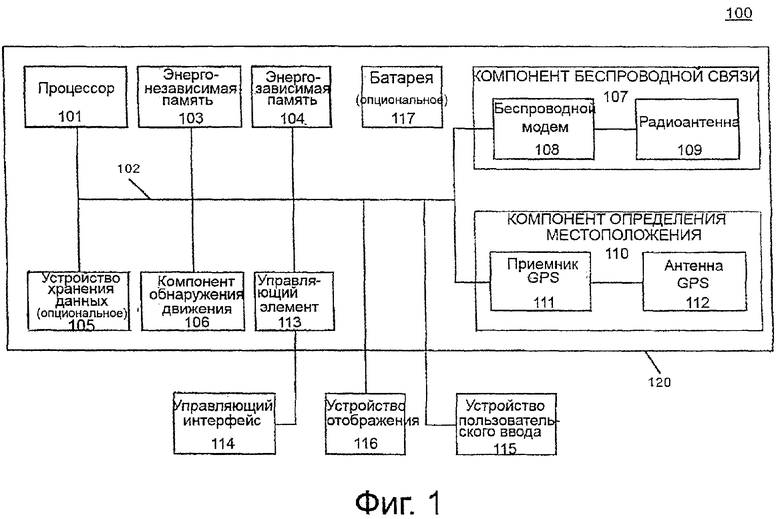
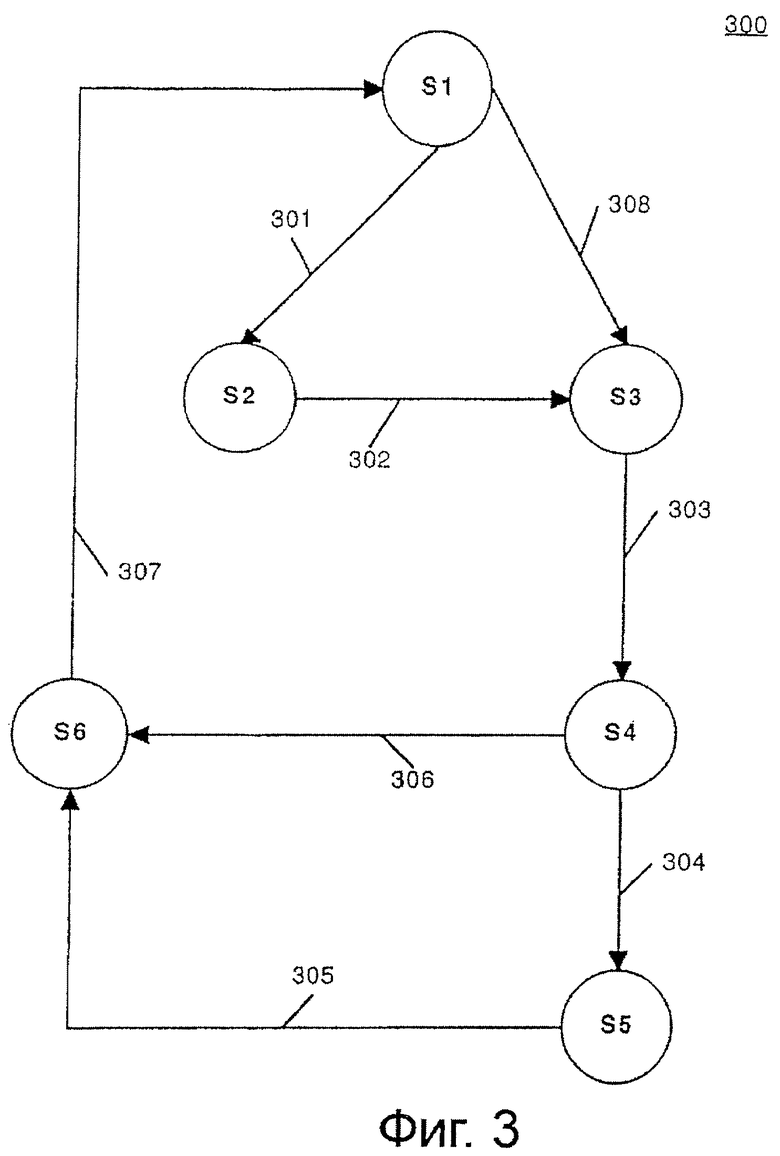
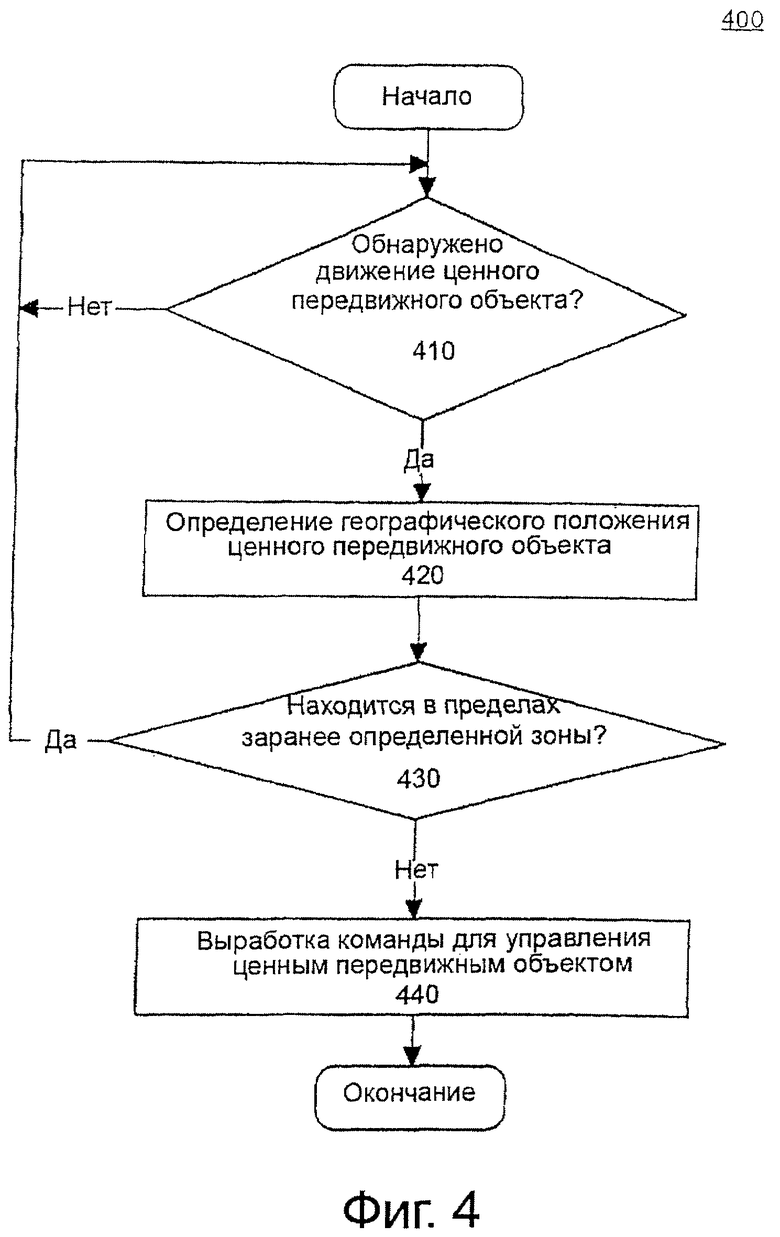
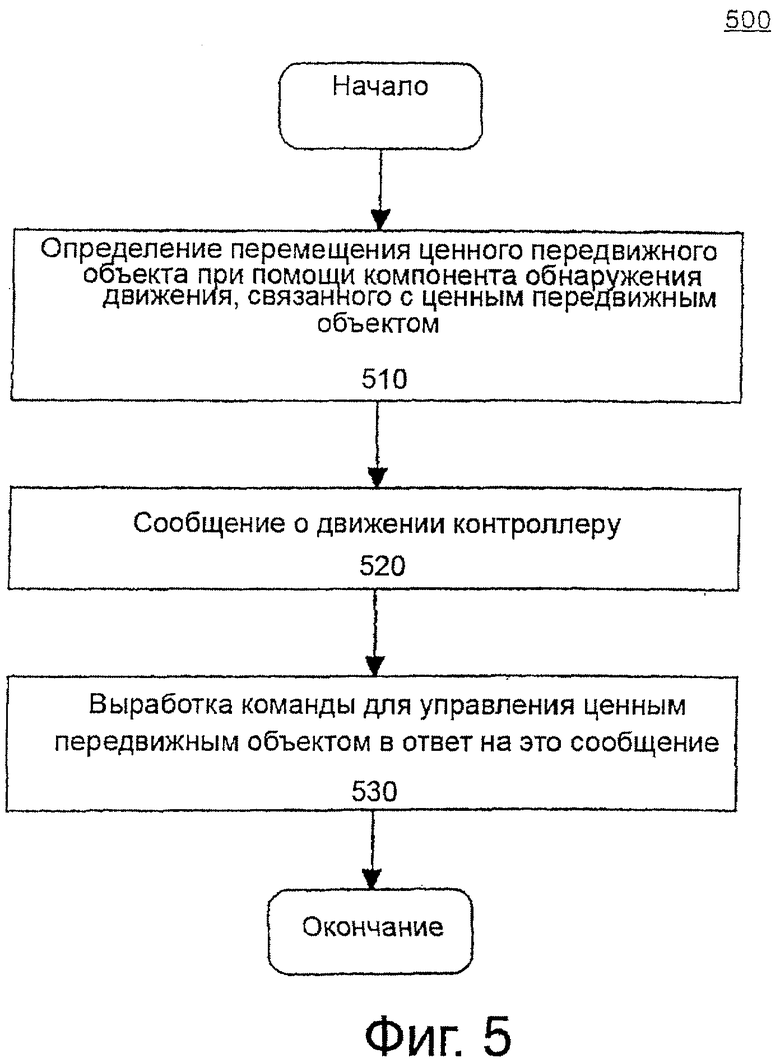
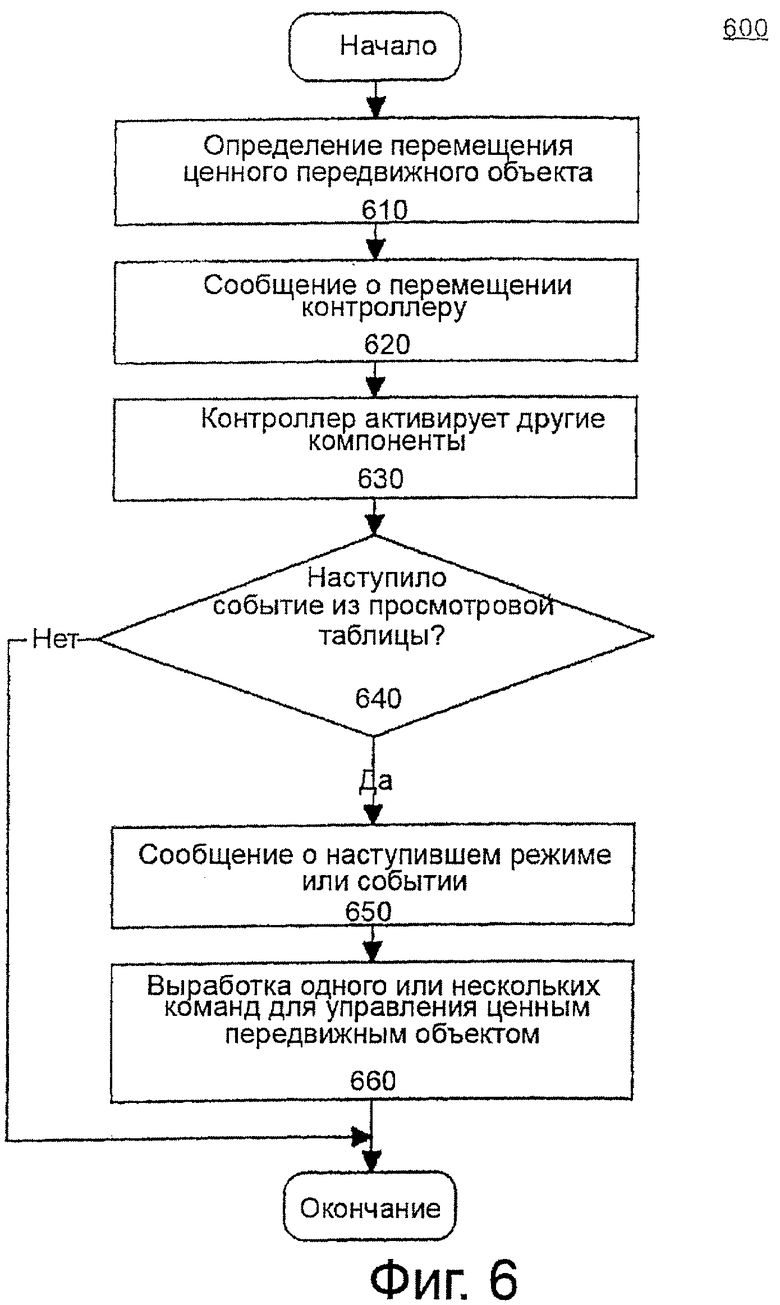
Изобретение относится к системам слежения за транспортными средствами и может использоваться в транспортных средствах, оснащенных устройством сообщения местоположения. Техническим результатом изобретения является обеспечение управления подвижным объектом в едином цикле с определением координат его местоположения, что позволяет в режиме реального времени управлять движением объекта, используя для этого непосредственно энергию, содержащуюся в сигнале отклика, генерируемого подвижным объектом. Настоящее изобретение описывает контроллер, который может быть соединен с компонентом определения местоположения и компонентом обнаружения движения. Компонент обнаружения движения обнаруживает движение передвижного объекта и вырабатывает для контроллера сигнал, сообщающий о движении. Контроллер в ответ на этот сигнал вызывает определение компонентом определения местоположения географического положения передвижного объекта. Определяется, находится ли географическое положение в пределах заранее определенной зоны. В ответ на это определение может быть выработана команда для управления передвижным объектом. 3 н. и 23 з.п. ф-лы, 6 ил.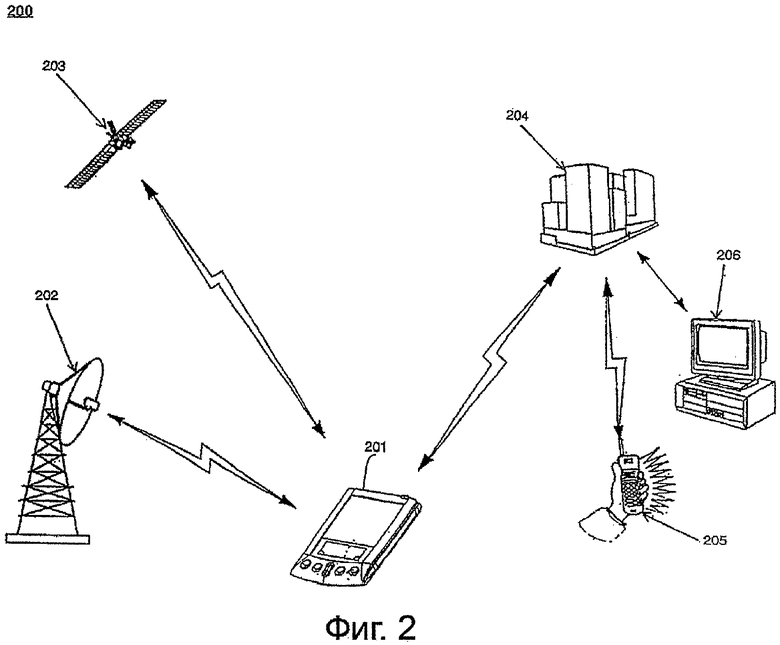
1. Способ управления передвижным объектом, содержащий этапы, на которых:
обнаруживают перемещение передвижного объекта при помощи компонента обнаружения движения, связанного с передвижным объектом;
сообщают об упомянутом перемещении контроллеру, связанному с передвижным объектом;
в ответ на указанное сообщение выполняют определение географического положения передвижного объекта; и
используя указанное определенное географическое положение вырабатывают команду для управления передвижным объектом в ответ на упомянутое сообщение и в ответ на заданные условия.
2. Способ по п.1, в котором заданные условия содержат географическое положение передвижного объекта, при этом способ дополнительно содержит этапы, на которых:
определяют, находится ли упомянутое определенное географическое положение в пределах заранее определенной зоны; и
вырабатывают команду в ответ на упомянутое определение.
3. Способ по п.1, в котором с передвижным объектом связывают запускающее устройство, причем запускающее устройство содержит:
упомянутый контроллер;
упомянутый компонент определения местоположения и
упомянутый компонент обнаружения движения.
4. Способ по п.3, содержащий этап, на котором распределяют контроллер, компонент обнаружения движения и компонент определения местоположения в пределах передвижного объекта.
5. Способ по п.1, в котором этап определения географического положения передвижного объекта выполняют с использованием спутниковой системы определения местоположения или наземной системы определения местоположения.
6. Способ по п.1, в котором заданные условия включают текущее время.
7. Способ по п.1, дополнительно содержащий этап, на котором отправляют сообщение при помощи компонента беспроводной связи, связанного с контроллером.
8. Способ по п.7, в котором контроллер автоматически вызывает передачу компонентом беспроводной связи упомянутого сообщения, когда определено, что упомянутое географическое положение находится за пределами определенной зоны.
9. Способ по п.7, в котором упомянутое сообщение содержит информацию о неисправности, связанную с передвижным объектом.
10. Способ по п.7, дополнительно содержащий этап, на котором используют просмотровую таблицу для обнаружения события, связанного с передвижным объектом, и вызывают передачу упомянутого сообщения.
11. Способ по п.7, в котором передача сообщения содержит передачу географического положения при помощи компонента беспроводной связи.
12. Способ по п.1, в котором передвижной объект выбран из группы, состоящей из транспортного средства, груза, трактора, экскаватора с обратной лопатой, трактора повышенной проходимости, грузового автомобиля повышенной проходимости, асфальтобетоноукладочного оборудования, электронного устройства, тракторного скрепера, компьютера, инструмента, бытового прибора, сотового телефона, переносного вычислительного устройства, ноутбука и самоходной электрической системы.
13. Способ по п.1, в котором этап определения географического положения передвижного объекта в ответ на указанное сообщение включает в себя изменение контроллером состояния запускающего компонента из неактивного состояния, в котором запускающий компонент не делает попыток определить географическое положение, в активное состояние, в котором запускающий компонент может попытаться определить географическое положение.
14. Запускающий компонент для передвижного объекта, содержащий компонент обнаружения движения, связанный с передвижным объектом, предназначенный для обнаружения перемещения передвижного объекта, средство для сообщения об упомянутом перемещении контроллеру, связанному с передвижным объектом; и
средство для выработки команды для управления передвижным объектом в ответ на упомянутое сообщение и в ответ на заданные условия, компонент определения местоположения, связанный с контроллером и предназначенный для установления географического положения передвижного объекта, при этом компонент обнаружения движения вырабатывает сигнал, когда обнаруживается перемещение передвижного объекта,
причем контроллер автоматически вызывает определение компонентом определения местоположения географического положения в ответ на упомянутый сигнал.
15. Запускающий компонент по п.14, характеризующийся тем, что выполнен с возможностью находиться в неактивном состоянии, в котором запускающий компонент не делает попыток определить географическое положение передвижного объекта до поступления в контроллер сообщения о перемещении передвижного объекта, и
в активном состоянии, в котором запускающий компонент может попытаться определить географическое положение передвижного объекта после поступления в контроллер сообщения о перемещении передвижного объекта.
16. Запускающий компонент по п.14, в котором контроллер определяет, находится ли географическое положение в пределах заранее определенной зоны, и вырабатывает команду для управления передвижным объектом в ответ на упомянутое определение.
17. Запускающий компонент по п.14, дополнительно содержащий компонент беспроводной связи, связанный с контроллером.
18. Запускающий компонент по п.17, в котором контроллер автоматически вызывает отправку сообщения компонентом беспроводной связи, когда определено, что географическое положение находится за пределами заданной зоны.
19. Запускающий компонент по п.14, в котором контроллер, компонент обнаружения движения и компонент определения местоположения распределены внутри передвижного объекта.
20. Запускающий компонент по п.14, в котором компонент обнаружения движения является датчиком ускорения, датчиком наклона, датчиком вибрации, датчиком вращения, гироскопом или датчиком движения.
21. Запускающий компонент по п.14, в котором передвижной объект выбран из группы, состоящей из транспортного средства, груза, трактора, экскаватора с обратной лопатой, трактора повышенной проходимости, грузового автомобиля повышенной проходимости асфальтобетоноукладочного оборудования, электронного устройства, тракторного скрепера, компьютера, инструмента, бытового прибора, сотового телефона, переносного вычислительного устройства, ноутбука и самоходной электрической системы.
22. Запускающий компонент по п.18, в котором сообщение содержит информацию о неисправности, связанную с передвижным объектом.
23. Запускающий компонент по п.18, в котором контроллер использует просмотровую таблицу для обнаружения события, связанного с передвижным объектом, который вызывает передачу упомянутого сообщения.
24. Система слежения за местоположением, содержащая:
поставщика услуг по слежению за местоположением; и
передвижной объект, связанный с запускающим компонентом по любому из пп.14-23.
25. Система слежения за местоположением по п.24, в которой компонент определения местоположения использует систему определения местоположения для установления упомянутого географического положения.
26. Система слежения за местоположением по п.25, в которой упомянутая система определения местоположения содержит спутниковую систему определения местоположения или наземную систему определения местоположения.
| ПОДВИЖНОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 1991 |
|
RU2134908C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099206C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ ВРАЩАЮЩИХСЯ ДЕТАЛЕЙ | 1995 |
|
RU2085935C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В УСТРОЙСТВО С ПАМЯТЬЮ И ОБРАБОТКИ ВВОДИМОЙ ИНФОРМАЦИИ | 1994 |
|
RU2095851C1 |

