Изобретение относится к области машиностроения и может быть использовано как в общем, так и в транспортном машиностроении, в частности в качестве бесступенчатой коробки передач автомобилей и других транспортных средств.
Из уровня техники известны рассмотренные ниже двухрежимные бесступенчатые приводы, также называемые супервариаторами, принятые за аналоги.
Известен бесступенчатый привод на основе вариатора, в дальнейшем называемого базовым, преимущественно симметричного по передаточному отношению - клиноременного или тороидального, позволяющего использовать для расширения диапазона варьирования передаточного отношения привода два режима регулирования передаточного отношения базового вариатора. Один режим, например, уменьшающий передаточное отношение базового вариатора, используется непосредственно, а второй, увеличивающий его, используется с циркуляцией мощности в замкнутом режиме с дифференциальной конической зубчатой передачей, преобразующей увеличение передаточного отношения базового вариатора в дальнейшее уменьшение передаточного отношения всего привода. Таким образом, диапазон варьирования передаточного отношения привода существенно расширяется по сравнению с диапазоном варьирования передаточного отношения базового вариатора (см. Пронин Б.А., Ревков Г.А. «Вариаторы», М., Машиностроение, 1980, с.298, рис.184-185). Этому устройству-аналогу присущи недостатки, заключающиеся в том, что базовый вариатор выполняется не по планетарной схеме, является симметричным по передаточному отношению, привод содержит большое число вспомогательных передач, в том числе и дифференциальную коническую зубчатую передачу, что усложняет привод и существенно снижает его КПД.
Известен двухрежимный бесступенчатый привод, содержащий корпус, в котором установлен базовый вариатор, например, дисковый планетарный, с входным и выходным кинематическими звеньями, управляющий механизм, кинематически связанный с вариатором и включающий согласующую планетарную и дифференциальную передачи и выходное кинематическое звено привода, причем выходное кинематическое звено привода выполнено с возможностью его попеременного кинематического соединения с кинематическими звеньями управляющего механизма (см. PCT/RU 03/00298, 2003, «Широкодиапазонный бесступенчатый привод (супервариатор)», публикация WO 2005/003596 от 13.01.05, автор - Гулиа Н.В.). Последнее техническое решение принято за прототип, так как обладает максимальной совокупностью общих с изобретением признаков.
Недостатком известного привода, принятого за прототип, является высокая частота вращения его выходного кинематического звена, которая, в большинстве случаев, затем должна понижаться при передаче к рабочему органу (например, колесам автомобиля). Это вызывает излишние потери мощности при ее передаче к рабочему органу и усложнение привода. К тому же, в режиме работы только базового вариатора из-за наличия повышающей согласующей передачи понижается КПД привода.
Задача изобретения состояла в создании привода, позволяющего передавать крутящий момент в режиме понижения частоты вращения от входного кинематического звена базового вариатора к выходному звену привода, что упрощает привод, повышает КПД базового вариатора и позволяет избежать высоких промежуточных частот вращения элементов управляющего механизма и связанных с ними проблем (вибраций и пр.).
Указанная задача решается тем, что предложен вариант выполнения двухрежимного бесступенчатого привода (супервариатора), содержащего корпус, в котором установлен базовый вариатор с входным и выходным кинематическими звеньями, управляющий механизм, кинематически связанный с базовым вариатором и включающий согласующую планетарную и дифференциальную передачи и выходное кинематическое звено привода, причем выходное кинематическое звено привода выполнено с возможностью его попеременного кинематического соединения с кинематическими звеньями управляющего механизма, в котором, согласно изобретению, согласующая планетарная передача выполнена с возможностью попеременного кинематического соединения ее водила или с водилом дифференциальной передачи, или с внешним центральным колесом дифференциальной передачи, а внутреннее центральное колесо дифференциальной передачи выполнено с возможностью соединения его с выходным кинематическим звеном базового вариатора, при этом внешнее центральное колесо согласующей планетарной передачи соединено с входным кинематическим звеном базового вариатора, а внутреннее центральное колесо согласующей планетарной передачи соединено с неподвижным корпусом, причем выходной вал привода выполнен с возможностью его попеременного кинематического соединения с внешним центральным колесом дифференциальной передачи при соединении водила согласующей планетарной передачи с водилом дифференциальной передачи, или с водилом дифференциальной передачи при соединении водила согласующей планетарной передачи с внешним центральным колесом дифференциальной передачи.
Для решения поставленной задачи предложен второй вариант выполнения двухрежимного бесступенчатого привода (супервариатора), содержащий корпус, в котором установлен базовый вариатор с входным и выходным кинематическими звеньями - валами, управляющий механизм, кинематически связанный с базовым вариатором и включающий согласующую планетарную и дифференциальную передачи и выходной вал привода, причем выходной вал привода выполнен с возможностью его попеременного кинематического соединения с кинематическими звеньями управляющего механизма, в котором, согласно изобретению, согласующая планетарная передача выполнена с возможностью попеременного кинематического соединения ее водила или с водилом дифференциальной передачи, или с внутренним центральным колесом дифференциальной передачи, а внешнее центральное колесо дифференциальной передачи выполнено с возможностью соединения его с выходным кинематическим звеном базового вариатора, при этом внешнее центральное колесо согласующей передачи соединено с входным кинематическим звеном базового вариатора, а внутреннее центральное колесо согласующей планетарной передачи соединено с неподвижным корпусом, причем выходной вал привода выполнен с возможностью его попеременного кинематического соединения с внутренним центральным колесом дифференциальной передачи при соединении водила согласующей планетарной передачи с водилом дифференциальной передачи, или с водилом дифференциальной передачи при соединении водила согласующей планетарной передачи с внутренним центральным колесом дифференциальной передачи.
Для решения поставленной задачи предложен также третий вариант выполнения двухрежимного бесступенчатого привода (супервариатора), содержащий корпус, в котором установлен базовый вариатор с входным и выходным кинематическими звеньями - валами, управляющий механизм, кинематически связанный с базовым вариатором и включающий согласующую планетарную и дифференциальную передачи и выходной вал привода, причем выходной вал привода выполнен с возможностью его попеременного кинематического соединения с кинематическими звеньями управляющего механизма, в котором, согласно изобретению, согласующая планетарная передача выполнена с возможностью попеременного кинематического соединения ее водила или с водилом дифференциальной передачи, или с внутренним центральным колесом дифференциальной передачи, а выходное кинематическое звено базового вариатора выполнено с возможностью попеременного соединения его как с внешним, так и с внутренним центральным колесом дифференциальной передачи, причем внешнее центральное колесо согласующей планетарной передачи соединено с входным кинематическим звеном базового вариатора, а внутреннее центральное колесо согласующей планетарной передачи соединено с неподвижным корпусом, при этом выходной вал привода выполнен с возможностью его попеременного кинематического соединения с внешним центральным колесом дифференциальной передачи при соединении водила согласующей планетарной передачи с водилом дифференциальной передачи, или с водилом дифференциальной передачи при соединении водила согласующей планетарной передачи с внутренним центральным колесом дифференциальной передачи.
Отличием привода по трем вариантам выполнения привода является то, что соединение кинематических звеньев выполнено в виде сцепных муфт.
Еще одним отличием привода является то, что согласующая планетарная передача выполнена с понижающим от входного вала к водилу передаточным отношением.
В числе отличий следует отметить, что привод снабжен датчиками, измеряющими частоту вращения, один из которых установлен на входном, а другой на выходном кинематических звеньях базового вариатора, причем датчики соединены с блоком сравнения частот вращения, который выдает сигнал на соединение кинематических звеньев привода при выравнивании их частот вращения.
Еще одним отличием предлагаемого привода является то, что согласующая передача выполнена в виде планетарной передачи, имеющей неподвижное внутреннее центральное колесо.
Среди отличий следует отметить, что базовый вариатор выполнен в виде дискового фрикционного планетарного вариатора с внутренними и внешними центральными фрикционными дисками и фрикционными сателлитами и снабжен приводом, осуществляющим перемещение фрикционных сателлитов относительно внутренних и внешних центральных фрикционных дисков вариатора.
Еще одним отличием предлагаемого привода является то, что в привод введена дополнительная передача, связывающая выходное кинематическое звено управляющего механизма с выходным кинематическим звеном привода, причем выходное кинематическое звено привода выполнено с возможностью вывода вращения в обе стороны от дополнительной передачи.
Благодаря отмеченным выше особенностям выполнения привода в трех вариантах в нем обеспечивается технический результат, заключающийся в том, что предложенный привод позволяет передавать крутящий момент в режиме понижения частоты вращения от входного кинематического звена вариатора к выходному звену привода, что упрощает привод, повышает его КПД и позволяет избежать высоких промежуточных частот вращения элементов управляющего механизма и связанных с ними проблем (вибраций и пр.).
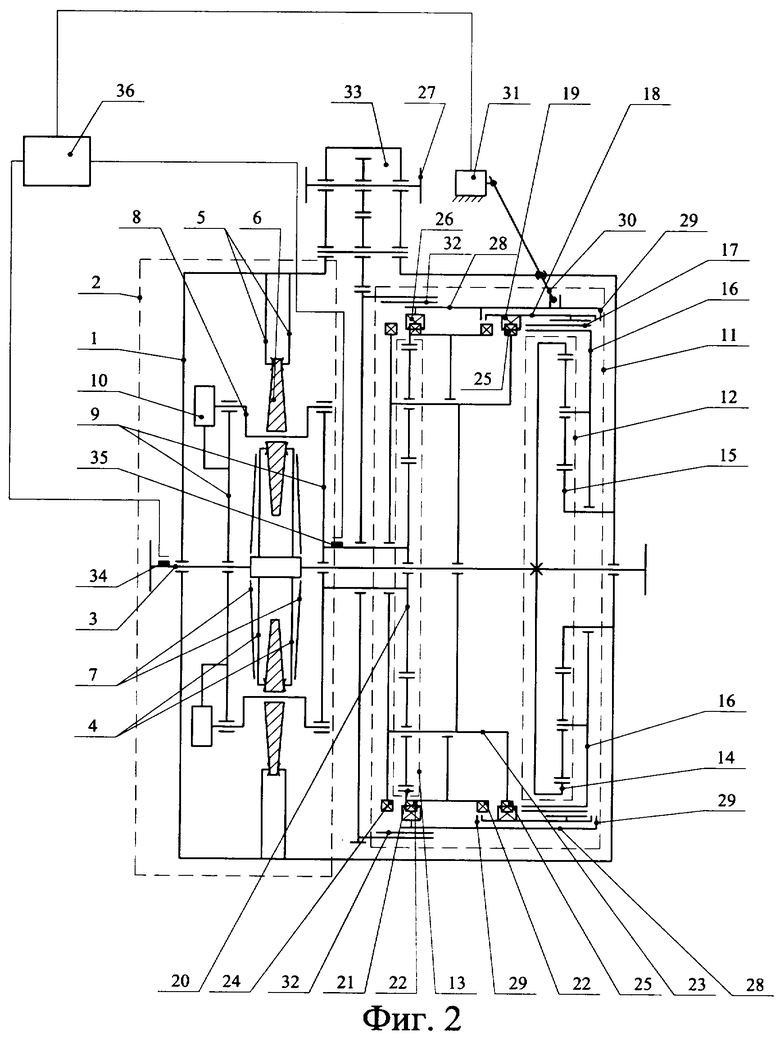
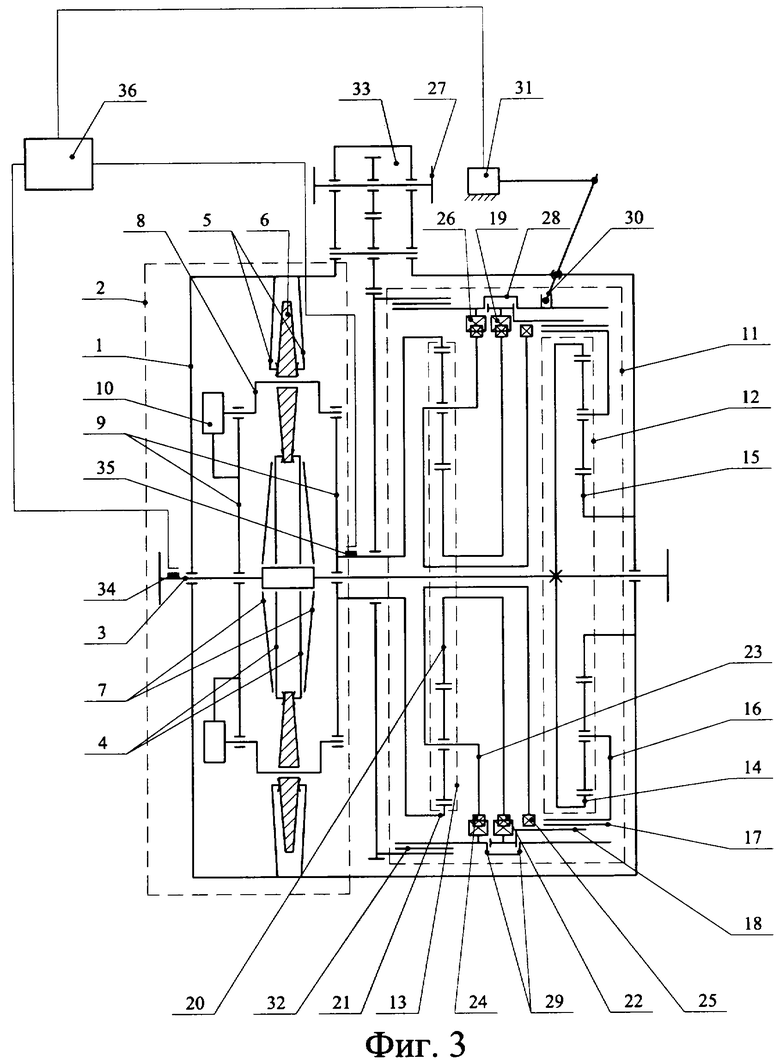
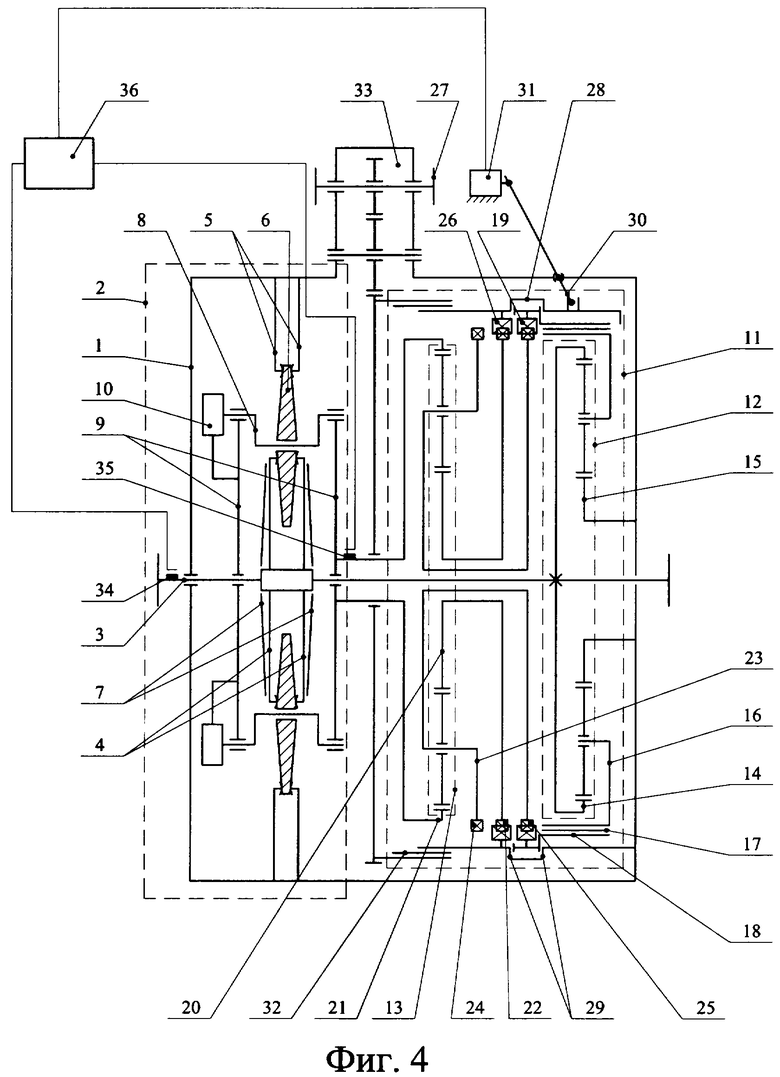
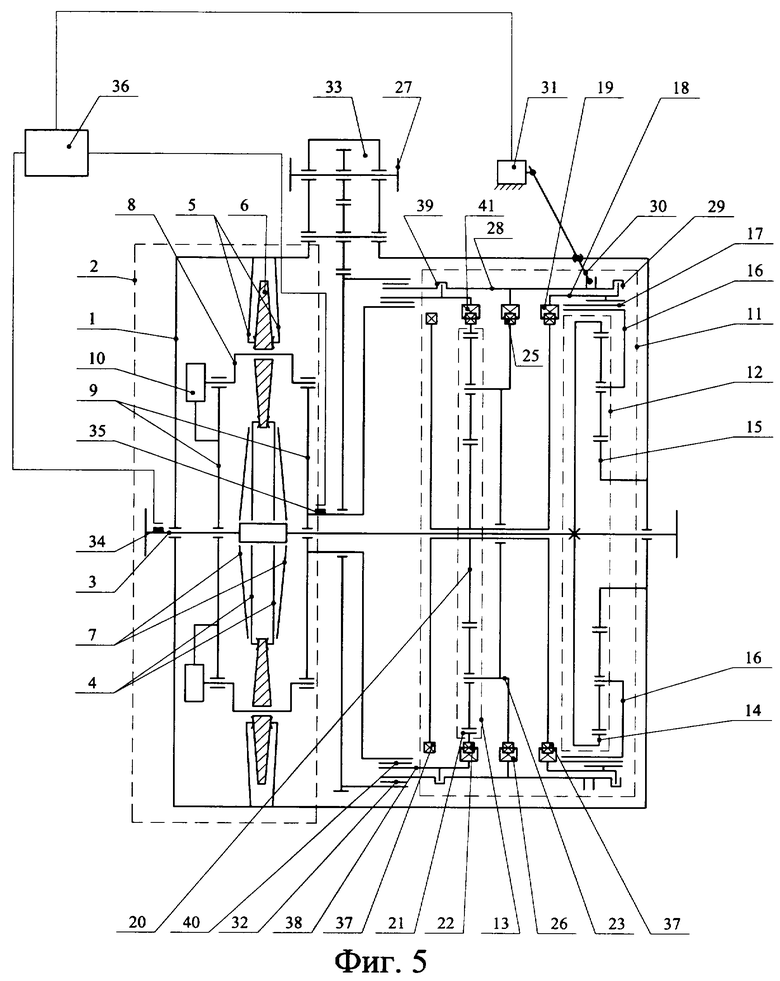
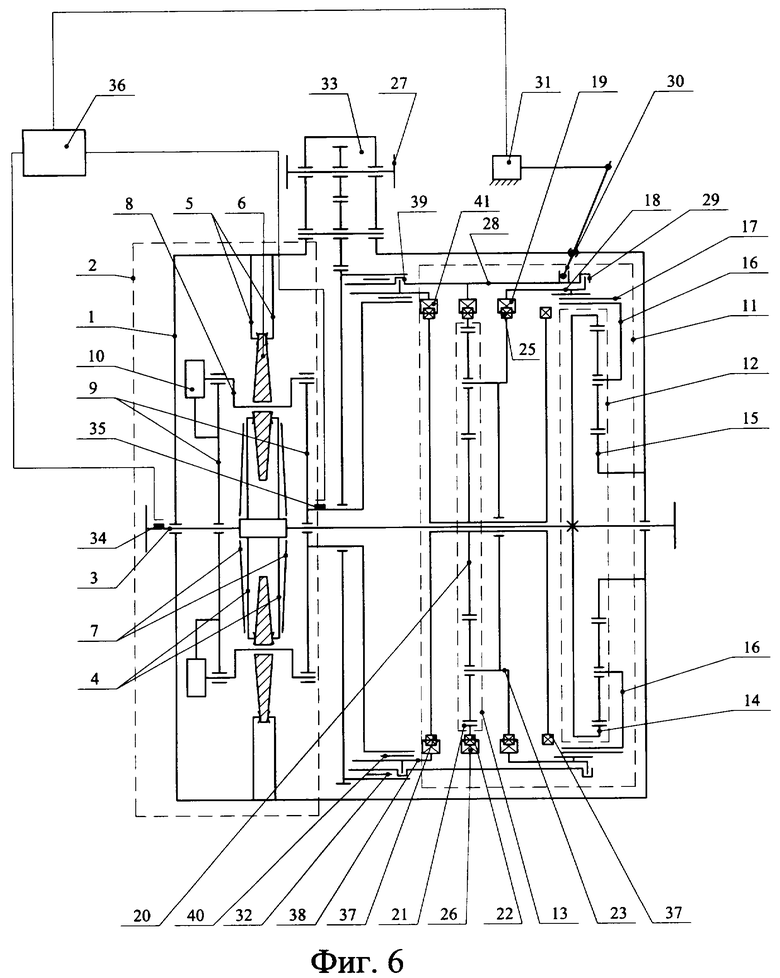
Сущность изобретения поясняется чертежами. На фиг.1 изображена кинематическая схема бесступенчатого привода (супервариатора) в первом варианте его исполнения в режиме редукции. На фиг.2 изображена схема этого привода в режиме мультипликации. На фиг.З представлена кинематическая схема второго варианта исполнения привода в режиме редукции, а на фиг.4 - схема этого же варианта исполнения привода в режиме мультипликации, на фиг.5 представлена схема третьего варианта привода в режиме редукции, а на фиг.6 - схема этого варианта исполнения привода в режиме мультипликации.
Предлагаемый привод (фиг.1) содержит корпус 1, в котором размещен базовый вариатор 2 (выделен на чертежах штриховой линией), включающий кинематическое звено 3 базового вариатора, одновременно являющееся входным звеном привода и выполненное в виде вала, проходящего через весь привод с возможностью подсоединения к нему с обеих сторон корпуса 1, внутренние 4 и внешние 5 центральные фрикционные диски, между которыми расположены промежуточные конические фрикционные диски - сателлиты 6, причем нажим на внутренние центральные фрикционные диски 4 осуществляется пружинами 7, например, тарельчатыми. Сателлиты 6 зафиксированы с возможностью вращения на поворотных рычагах 8, посаженных с возможностью поворота на выходном кинематическом звене 9 базового вариатора 2, которым является водило базового вариатора. Базовый вариатор 2 снабжен приводом 10, например, шаговым электродвигателем, закрепленным на выходном кинематическом звене 9 базового вариатора 2 и осуществляющим перемещение сателлитов 6 относительно внутренних 4 и внешних 5 центральных фрикционных дисков базового вариатора 2. Привод снабжен управляющим механизмом 11 (выделен на чертежах штриховой линией), кинематически связанным с базовым вариатором 2 и включающим согласующую планетарную передачу 12 и дифференциальную передачу 13 (выделены на чертежах штриховой линией). Следует отметить, что допускается любое выполнение согласующей планетарной и дифференциальной передач. В данном случае эти передачи являются зубчатыми.
Входное кинематическое звено 3 базового вариатора соединено с внешним центральным зубчатым колесом 14 согласующей планетарной передачи 12, внутреннее центральное зубчатое колесо 15 которой соединено с неподвижным звеном, в данном случае корпусом 1. Водило 16 согласующей передачи соединено телескопическим соединением, например, шлицевым 17, с втулкой 18, несущей зубчатый венец 19 внутреннего зацепления. Выходное кинематическое звено 9 базового вариатора 2 соединено с внутренним центральным колесом 20 дифференциальной передачи 13, а внешнее центральное зубчатое колесо 21 содержит зубчатый венец 22 внешнего зацепления, в данном случае разделенный на две части, расположенные по его правому и левому краям. Водило 23 дифференциальной передачи 13 содержит два зубчатых венца внешнего зацепления 24 и 25, причем венец 24 может входить в зацепление с венцом внутреннего зацепления 26, кинематически соединенным с выходным валом 27 привода. Зубчатый венец 25 внешнего зацепления может входить в зацепление с венцом 19 внутреннего зацепления, причем венец 19 может также и сцепляться с венцом 22 (его правой частью). Таким образом, венец 19 вместе с венцами 22 и 25, а также венец 26 с венцами 22 и 24 образуют, соответственно, зубчатые муфты сцепления. Втулка 28 с внутренней стороны несет закрепленную на ней с возможностью свободного вращения втулку 18, ограниченную в осевом перемещении вдоль втулки 28 упорами 29. Втулка 28 имеет возможность осевого перемещения относительно корпуса 1, например, с помощью вилки 30, приводимой, например, от электромагнита 31, причем втулка 28 перемещает в осевом направлении и втулку 18 с помощью упоров 29. Втулка 28 телескопически, например, с помощью шлицев 32, соединена с выходным валом 27 всего привода (супервариатора), который может выходить как в одну - правую, так и в другую - левую сторону корпуса 1, с помощью, например, зубчатого редуктора 33. Входное звено 3 также может выходить наружу в обе стороны - правую и левую - из корпуса 1. Управление приводом - переключением муфт сцепления - может осуществляться как вручную, так и с помощью датчиков 34 частоты вращения звена 3, датчиков 35 частоты вращения звена 9 и блока сравнения 36, электрически связанного с датчиками 34 и 35, а также с электромагнитом 31, осуществляющим переключение зубчатых муфт сцепления. При таком положении дифференциального механизма 13, когда частоты вращения всех его звеньев - колес 20, 21 и водила 23 - совпадают и равны частоте вращения водила 16 согласующей передачи 12, передаточные отношения которой равно для реального образца передачи 1,25. На фиг.1 представлена схема супервариатора в режиме редукции, когда с повышением передаточного отношения вариатора 2 повышается и передаточное отношение всего привода - супервариатора, т.е. с уменьшением частоты вращения выходного кинематического звена 9 вариатора 2 уменьшается частота вращения вала 27.
Для простоты на чертежах не представлен механизм реверса, осуществляющий задний ход привода, как не имеющий непосредственного отношения к принципу работы привода, который может быть выполнен любым известным способом, и размещенным, например, в редукторе 33.
На фиг.2 изображена схема того же варианта супервариатора, что и на фиг.1, только в режиме мультипликации, т.е. когда вариатор 2 повышает свое передаточное отношение, а у супервариатора передаточное отношение понижается, тогда выходной вал 27 начинает увеличивать свою частоту вращения при убавлении частоты вращения выходного звена 9 вариатора 2.
Работа супервариатора по первому варианту исполнения происходит следующим образом. Если рассматривать работу привода (супервариатора) при повышении частоты вращения его выходного звена 27 от минимальной до максимальной при постоянной частоте вращения входного звена 3, то первым следует режим редукции. При этом звенья управляющего механизма 11 соединены муфтами сцепления так, как показано на фиг.1. Выходное звено 9 базового вариатора 2 соединено с центральным внутренним колесом 20, при этом колесо 21, которое несет на себе зубчатые венцы 22, соединено с водилом 16 согласующей передачи 12 зацеплением венцов 22 с венцом 19 на втулке 18, связанной шлицем 17 с водилом 16 согласующей планетарной передачи 12 и перемещаемой вместе с втулкой 28 с помощью упоров 29. Внутреннее центральное колесо 15 согласующей передачи 12 неподвижно соединено с корпусом 1, а внешнее 14 - с входным звеном 3. Водило 23 дифференциальной передачи 13 соединено с помощью венцов 24 и 26 с выходным валом 27 привода (супервариатора) через втулку 28, шлицы 32 и редуктор 33. Втулка 28 находится при этом в левом крайнем положении, перемещенная туда с помощью вилки 30 вручную или сервоприводом - электромагнитом 31. Выходное звено привода 27 при этом, то есть при работе супервариатора в режиме редукции, повышает частоту вращения существенно в меньшем диапазоне, чем выходное звено 9 вариатора 2. Например, для реальной конструкции диапазон варьирования базового вариатора 2, входящего в супервариатор, около 6, а диапазон варьирования частоты вращения выходного звена 27 супервариатора при выполнении по фиг.1 около 1,4. Однако КПД базового вариатора 2 меняется от 0,7 до 0,94, а супервариатора остается примерно постоянным и равным 0,94-0,96 при выполнении по фиг.1, т.е. в режиме редукции. При этом через базовый вариатор 2 проходит только от 20 до 60% полной мощности, что позволяет выполнять его компактным.
При понижении передаточного отношения базового вариатора путем перемещения сателлитов 6 к центру приводом 10 и достижении выходным звеном 9 базового вариатора максимальной частоты вращения, а передаточного отношения, соответственно, минимального значения, что фиксируется, например, датчиками 34 и 35 через блок сравнения 36, вилка 30 вручную или с помощью сервопривода - электромагнита 31, электрически связанного с блоком сравнения 36 - переключается, продвигая втулку 28 вправо, и без разрыва потока мощности, с сохранением действующей частоты вращения всех звеньев привода, супервариатор переключается на работу в режиме мультипликации (см. фиг.2). При этом внешнее центральное колесо 21 дифференциальной передачи 13 соединяется венцами 22 и 26 с выходным звеном 27 супервариатора через редуктор 33 и шлицы 32 на втулке 28, а водило 23 дифференциальной передачи 13 с помощью венцов 25 и 19 на втулке 18 соединяется с водилом 16 согласующей передачи 12. Теперь передаточное отношение базового вариатора 2 приводом 10 изменяется от минимального до максимального значения, частота вращения выходного звена 9 базового вариатора меняется от максимального до минимального значения в данном конкретном исполнении с диапазоном варьирования около 6, т.е. частота вращения звена 9 уменьшается в 6 раз, а выходное звено 27 супервариатора повышает частоту своего вращения в 1,5 раза в исполнении по фиг.2. КПД супервариатора при этом изменяется примерно от 0,93 до 0,97 в исполнении по фиг.2, а через базовый вариатор проходит от 50 до 5% мощности. Таким образом, супервариатор представляет собой механический вариатор с достаточно узким диапазоном варьирования, но с высоким КПД. При выполнении по фиг.1 и фиг.2 диапазон варьирования очень узок (около 2,1) и требует дополнительных ступеней в трансмиссии, однако КПД предельно высок для вариаторов.
Повышение передаточного отношения привода (супервариатора) производится в обратном порядке.
Следует отметить, что неразрывность потока мощности в приводе (супервариаторе) при переходе с режима редукции в режим мультипликации и обратно достигается тем, что зубчатые муфты сцепления, образуемые зубчатыми венцами 19 и 22-25, а также венцами 26 и 22-24, переключаются без освобождения от предыдущей связи, оставаясь некоторый промежуток времени включенными сразу в двух положениях. Одинаковая частота вращения всех включаемых звеньев позволяет это осуществлять. Например, венец 19, переходя с зацепления с венцом 22 на венец 25, некоторое время, хотя бы долю секунды, находится в зацеплении как с венцом 22, так и с венцом 25. То же самое происходит при переходе венца 26 с венца 22 на венец 24 и обратно. Соотношение ширины венцов 19 и 26 с зазорами между венцами 22 и 25, а также 22 и 24 позволяет делать это.
Изображенный на фиг.3 и 4 второй вариант выполнения привода отличается от описанного выше тем, что он имеет более широкий диапазон варьирования передаточного отношения супервариатора - до 5-ти при несколько пониженном по отношению к первому варианту КПД - от 0,9 до 0,95 в режиме редукции и от 0, 85 до 0,95 в режиме мультипликации. Однако по сравнению с базовым вариатором 2 КПД супервариатора во втором варианте выше. Конструктивно второй вариант выполнения супервариатора отличается от первого тем, что выходное кинематическое звено 9 базового вариатора 2 соединено с внешним центральным колесом 21 дифференциальной передачи 13, а внутреннее центральное зубчатое колесо 20 содержит зубчатый венец 22, который, в отличие от первого варианта, выполнен в единственном числе.
Работа супервариатора по второму варианту отличается от первого варианта тем, что в режиме редукции (фиг.З) выходное звено 9 базового вариатора соединено с центральным внешним колесом 21, а при этом колесо 20, которое несет на себе зубчатый венец 22 с внешним зацеплением, соединено с водилом 16 согласующей передачи 12 зацеплением венца 22 и венцом 19 на втулке 18, связанной шлицем 17 с водилом 16, и перемещается вместе с втулкой 28 с помощью упоров 29, вилкой 30 и электромагнитом 31.
Работа супервариатора по второму варианту отличается от первого варианта тем, что в режиме мультипликации (фиг.4) внутреннее центральное колесо 20 дифференциальной передачи 13 соединяется венцами 22 и 26 с выходным звеном 27 супервариатора, а водило 23 дифференциальной передачи 13 с помощью венцов 25 и 19 на втулке 18 соединяется с водилом 16 согласующей передачи 12.
Теперь при изменении передаточного отношения базового вариатора 2 от минимального 1,3 до максимального 8 значений, при конкретном исполнении супервариатора по второму варианту, в режиме мультипликации передаточные отношения супервариатора меняются от максимального 1,3 до минимального 0,53. В режиме супервариатора по второму варианту при изменении передаточного отношения вариатора 2 от 8 до 1,3 передаточное отношение супервариатора меняется от 2,6 до 1,3. Суммарный диапазон изменения передаточных чисел супервариатора по второму варианту примерно равен 5, что делает возможным его использование в качестве бесступенчатой коробки передач для ряда транспортных средств без дополнительных ступеней в трансмиссии.
При работе супервариатора по второму варианту в режиме редукции через базовый вариатор 2 протекает до 70% общего потока мощности, в то время как при его работе в режиме мультипликации через базовый вариатор 2 протекает до 140% мощности, особенно в режиме минимальных передаточных отношений базового вариатора 2. Это требует повышения габаритно-массовых показателей упомянутого базового вариатора 2 по сравнению с первым вариантом.
Изображенный на фиг.5 и 6 третий вариант выполнения привода отличается от первых двух тем, что имеет высокий КПД как в первом варианте, при несколько расширенном диапазоне варьирования передаточного отношения супервариатора по сравнению с первым вариантом - около 3,5 при тех же параметрах согласующей 12 и дифференциальной 13 передач, что и в первых двух вариантах. Этот диапазон несколько ниже, чем у второго варианта, но важно то, что через базовый вариатор 2 в обоих режимах - как редукции, так и мультипликации - протекает не более 60… 70% общей мощности (это практически вдвое меньше, чем во втором варианте в режиме мультипликации), что позволяет выполнять его таким же компактным, как и в первом варианте. Конструктивно третий вариант выполнения супервариатора отличается от первых двух тем, что выходное кинематическое звено 9 базового вариатора 2 выполнено с возможностью телескопического соединения, например, с помощью шлицев 40 с обоймой 38, несущей на себе зубчатый венец 41 внутреннего зацепления, соединяющийся в режиме редукции (фиг.5) с зубчатым венцом 22 на внешнем центральном зубчатом колесе 21 дифференциальной передачи 13. Таким образом, в режиме редукции колесо 21 соединено с выходным кинематическим звеном 9 базового вариатора 2, как это выполнялось во втором варианте супервариатора. В режиме мультипликации (фиг.6) выходное кинематическое звено 9 базового вариатора 2 с помощью шлицев 40, венца 41 на обойме 38 и левого венца 37 на колесе 20 соединено с внутренним центральным зубчатым колесом 20 дифференциальной передачи 13, как это имело место в первом варианте супервариатора. Осевое перемещение обоймы 38 осуществляется с помощью упора 39 на обойме 28, телескопически соединенной с помощью шлицев 32 с выходным валом 27 всего привода. Осевое перемещение самой обоймы 28 выполняется так же, как и в первых двух вариантах супервариатора. С помощью упора 29 на обойме 28 от ее осевого перемещения приводится обойма 18 с венцом 19, выполненным с возможностью соединения его в режиме редукции с правым венцом 37 колеса 20 (фиг.5), а в режиме мультипликации - с венцом 25 водила 23 дифференциальной передачи 13. Венец 26 на обойме 28 в режиме редукции соединен с венцом 25 водила 23 дифференциальной передачи 13, а в режиме мультипликации - с венцом 22 на внешнем центральном зубчатом колесе 21 дифференциальной передачи 13, соединяя это колесо с выходным валом 27. Соединение венца 19 на обойме 18 с венцом 25 на водило 23, а также с правым венцом 37 на внутреннем центральном зубчатом колесе 20 выполнено так же, как и во втором варианте супервариатора, с той разницей, что венец на колесе 20 был в единственном экземпляре и обозначался цифрой 22, а в третьем варианте этих венцов два - правый и левый, и обозначены они уже цифрой 37.
Работа супервариатора по третьему варианту выполнения характеризуется тем, что для перехода в режим редукции, когда передаточное отношение базового вариатора 2 максимально и равно для рассматриваемого реального образца около восьми, выходное звено 9 базового вариатора 2 соединяется путем перемещения обоймы 28 на фиг.5 вправо при помощи вилки 30 и электромагнита 31, а также ведомого ею с помощью упора 29 обоймы 38, связанной шлицем 40 со звеном 9 и несущей на себе венец 41, с венцом 22 на внешнем центральном зубчатом колесе 21 дифференциальной передачи 13. Этим же перемещением обоймы 28 с помощью упора 29 водило 16 согласующей передачи 12 соединяется посредством венца 19 и венца 37 с внутренним центральным колесом 20 дифференциальной передачи 13. Выходной вал 27 супервариатора при этом соединен посредством венцов 26 и 25 с водилом 23 дифференциальной передачи 13. Передаточное отношение супервариатора при этом около 2,9 и с изменением передаточного отношения базового вариатора 2 с помощью привода 10 до 1,25 меняется также до 1,25. КПД и диапазон изменения передаточного отношения супервариатора при этом равны соответствующим значениям для второго варианта привода, когда выходное звено 9 базового вариатора 2 соединено с внешним центральным зубчатым колесом дифференциальной передачи 13.
Для перехода супервариатора по третьему варианту выполнения в режим мультипликации обойма 28, а также все соединенные с ней обоймы и венцы с помощью вилки 30 и электромагнита 31 передвигаются на схеме фиг.6 влево. Выходное звено 9 базового вариатора 2 при этом соединяется с помощью венца 37 с внутренним центральным зубчатым колесом 20 дифференциальной передачи 13, как в первом варианте выполнения супервариатора. Все положения соединяемых звеньев привода представлены на фиг.6, и они аналогичны первому варианту выполнения супервариатора. КПД и диапазон варьирования супервариатора также равны соответствующим значениям для первого варианта выполнения супервариатора.
В результате третий вариант выполнения супервариатора при максимально возможном КПД для всех вариантов имеет диапазон варьирования больший, чем первый вариант при доле мощности, протекающей через базовый вариатор 2, не превышающей соответствующую в первом варианте и меньшую, чем во втором варианте. Поэтому для многих назначений супервариатора, например, для гибридных силовых агрегатов автомобилей, этот третий вариант оптимален.
Супервариаторы как по первому варианту, так по второму и третьему при переключении режимов не вызывают разрыва потока мощности и не вызывают каких-либо изменений в скорости или ускорении движения транспортного средства.
Наиболее рациональное применение описанного изобретения - это бесступенчатые коробки передач автомобилей, особенно автобусов и тягачей, трансмиссии механических и электромеханических гибридных силовых агрегатов городских автобусов, а также в качестве мощных приводов разнообразных машин общепромышленного назначения - конвейеров, дробилок, смесительных машин, намоточных устройств, бурильных машин и других машин и устройств, требующих бесступенчатого привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2003 |
|
RU2311575C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2523506C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2523507C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2428608C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2428607C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2523508C2 |
| КОРОБКА ПЕРЕДАЧ | 2008 |
|
RU2410587C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2428611C2 |
| МНОГОДИАПАЗОННАЯ БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ (ВАРИАНТЫ) | 2010 |
|
RU2460919C2 |
Изобретение относится к области машиностроения и может быть использовано, например, в транспортном машиностроении в качестве бесступенчатой коробки передач автомобиля. Двухрежимный бесступенчатый привод-супервариатор содержит корпус (1), базовый вариатор (2), управляющий механизм (11), включающий согласующую планетарную (12) и дифференциальную (13) передачи, и выходной вал привода (27), который имеет возможность попеременного кинематического соединения с кинематическими звеньями управляющего механизма (11). Согласующая планетарная передача (12) может кинематически соединяться или с водилом (23), или с внешним центральным колесом (21) дифференциальной передачи (13). Внутреннее центральное колесо (20) дифференциальной передачи (13) может соединяться с выходным кинематическим звеном (9) базового вариатора (2). Внешнее центральное колесо (15) согласующей планетарной передачи (12) соединено с входным кинематическим звеном (9) базового вариатора (2). Внутреннее центральное колесо (15) согласующей планетарной передачи (12) соединено с неподвижным корпусом (1). Выходной вал привода (27) может быть соединен или с внешним центральным колесом (21), или с водилом (23) дифференциальной передачи (13). Второй вариант отличается от первого тем, что выходное кинематическое звено (9) базового вариатора (2) соединено с внешним центральным колесом (21) дифференциальной передачи (13), а внутреннее центральное колесо (20) содержит зубчатый венец (22), который выполнен в единственном числе. Третий вариант привода отличается от первых двух тем, что выходное кинематическое звено (9) базового вариатора (2) имеет возможность телескопического соединения с помощью шлицев (40) с обоймой (38), несущей на себе зубчатый венец (41) внутреннего зацепления. Изобретение позволяет передавать крутящий момент в режиме понижения частоты вращения от входного кинематического звена вариатора к выходному звену привода, что упрощает привод, повышает его КПД и позволяет избежать высоких промежуточных частот вращения элементов управляющего механизма. 3 н. и 6 з.п. ф-лы, 6 ил.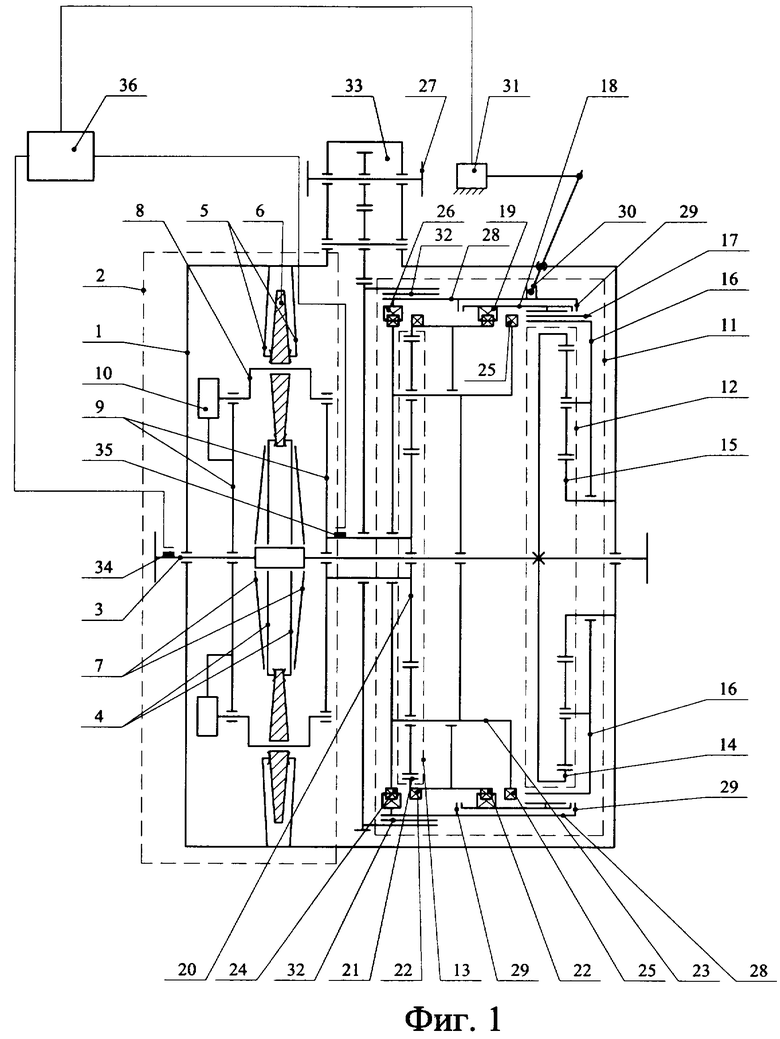
1. Двухрежимный бесступенчатый привод-супервариатор, содержащий корпус, в котором установлен базовый вариатор с входным и выходным кинематическими звеньями-валами, управляющий механизм, кинематически связанный с базовым вариатором и включающий согласующую планетарную и дифференциальную передачи, и выходной вал привода, причем выходной вал привода выполнен с возможностью его попеременного кинематического соединения с кинематическими звеньями управляющего механизма, отличающийся тем, что согласующая планетарная передача выполнена с возможностью попеременного кинематического соединения ее водила или с водилом дифференциальной передачи, или с внешним центральным колесом дифференциальной передачи, а внутреннее центральное колесо дифференциальной передачи выполнено с возможностью соединения его с выходным кинематическим звеном базового вариатора, при этом внешнее центральное колесо согласующей планетарной передачи соединено с входным кинематическим звеном базового вариатора, а внутреннее центральное колесо согласующей планетарной передачи соединено с неподвижным корпусом, причем выходной вал привода выполнен с возможностью его попеременного кинематического соединения с внешним центральным колесом дифференциальной передачи при соединении водила согласующей планетарной передачи с водилом дифференциальной передачи, или с водилом дифференциальной передачи при соединении водила согласующей планетарной передачи с внешним центральным колесом дифференциальной передачи.
2. Двухрежимный бесступенчатый привод-супервариатор, содержащий корпус, в котором установлен базовый вариатор с входным и выходным кинематическими звеньями-валами, управляющий механизм, кинематически связанный с базовым вариатором и включающий согласующую планетарную и дифференциальную передачи, и выходной вал привода, причем выходной вал привода выполнен с возможностью его попеременного кинематического соединения с кинематическими звеньями управляющего механизма, отличающийся тем, что согласующая планетарная передача выполнена с возможностью попеременного кинематического соединения ее водила или с водилом дифференциальной передачи, или с внутренним центральным колесом дифференциальной передачи, а внешнее центральное колесо дифференциальной передачи выполнено с возможностью соединения его с выходным кинематическим звеном базового вариатора, причем внешнее центральное колесо согласующей планетарной передачи соединено с входным кинематическим звеном базового вариатора, а внутреннее центральное колесо согласующей планетарной передачи соединено с неподвижным корпусом, при этом выходной вал привода выполнен с возможностью его попеременного кинематического соединения с внутренним центральным колесом дифференциальной передачи при соединении водила согласующей планетарной передачи с водилом дифференциальной передачи, или с водилом дифференциальной передачи при соединении водила согласующей планетарной передачи с внутренним центральным колесом дифференциальной передачи.
3. Двухрежимный бесступенчатый привод-супервариатор, содержащий корпус, в котором установлен базовый вариатор с входным и выходным кинематическими звеньями-валами, управляющий механизм, кинематически связанный с базовым вариатором и включающий согласующую планетарную и дифференциальную передачи и выходной вал привода, причем выходной вал привода выполнен с возможностью его попеременного кинематического соединения с кинематическими звеньями управляющего механизма, отличающийся тем, что согласующая планетарная передача выполнена с возможностью попеременного кинематического соединения ее водила или с водилом дифференциальной передачи, или с внутренним центральным колесом дифференциальной передачи, а выходное кинематическое звено базового вариатора выполнено с возможностью попеременного соединения его как с внешним, так и с внутренним центральным колесом дифференциальной передачи, причем внешнее центральное колесо согласующей планетарной передачи соединено с входным кинематическим звеном базового вариатора, а внутреннее центральное колесо согласующей планетарной передачи соединено с неподвижным корпусом, при этом выходной вал привода выполнен с возможностью его попеременного кинематического соединения с внешним центральным колесом дифференциальной передачи при соединении водила согласующей планетарной передачи с водилом дифференциальной передачи, или с водилом дифференциальной передачи при соединении водила согласующей планетарной передачи с внутренним центральным колесом дифференциальной передачи.
4. Привод по п.3, отличающийся тем, что соединение кинематических звеньев привода выполнено в виде сцепных муфт.
5. Привод по п.3, отличающийся тем, что согласующая планетарная передача выполнена с понижающим от входного вала к водилу передаточным отношением.
6. Привод по п.3, отличающийся тем, что привод снабжен датчиками, измеряющими частоту вращения, один из которых установлен на входном, а другой на выходном кинематических звеньях базового вариатора, причем датчики соединены с блоком сравнения частот вращения, который выдает сигнал на соединение кинематических звеньев привода при выравнивании их частот вращения.
7. Привод по п.3, отличающийся тем, что согласующая планетарная передача выполнена с неподвижным внутренним центральным зубчатым колесом.
8. Привод по п.3, отличающийся тем, что базовый вариатор выполнен в виде дискового фрикционного планетарного вариатора с внутренними и внешними центральными фрикционными дисками и фрикционными сателлитами, и снабжен приводом, осуществляющим радиальное перемещение фрикционных сателлитов относительно внутренних и внешних центральных фрикционных дисков базового вариатора.
9. Привод по п.3, отличающийся тем, что в него введена дополнительная передача, связывающая выходное кинематическое звено управляющего механизма с выходным валом привода, причем выходной вал привода выполнен с возможностью вывода вращения в обе стороны от дополнительной передачи.
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2003 |
|
RU2311575C2 |
| US 6855086 В2, 15.02.2005 | |||
| US 6949045 В2, 27.09.2005. | |||

