Изобретение относится к области машиностроения и может быть использовано в транспортном машиностроении, в частности, в качестве бесступенчатой коробки передач автомобилей и других транспортных средств.
Из уровня техники известны рассмотренные ниже широкодиапазонные бесступенчатые приводы, также называемые супервариаторами, принятые за аналоги.
Известен широкодиапазонный бесступенчатый привод с вариатором, преимущественно симметричным по передаточному отношению - клиноременным или тороидальным, позволяющий использовать для расширения диапазона варьирования передаточного отношения обе фазы регулирования передаточного отношения. Одна фаза, например, уменьшающая передаточное отношение вариатора, используется непосредственно, а вторая, увеличивающая его, используется с циркуляцией мощности в замкнутом режиме с дифференциальной конической зубчатой передачей, преобразующей увеличение передаточного отношения вариатора в дальнейшее уменьшение передаточного отношения всего привода. Таким образом, диапазон варьирования передаточного отношения привода существенно расширяется по сравнению с диапазоном варьирования передаточного отношения вариатора (см. Пронин Б.А., Ревков Г.А. «Вариаторы», М., Машиностроение, 1980, с.298, рис.184-185). Этому устройству-аналогу присущи недостатки, заключающиеся в том, что вариатор выполняется не по планетарной схеме, является симметричным по передаточному отношению, привод содержит большое число вспомогательных передач, в том числе и дифференциальную коническую зубчатую передачу, что усложняет привод и существенно снижает его КПД.
Известно также устройство «Бесступенчатая многодиапазонная передача с кинематической нейтралью», включающее вариатор, преимущественно торовый двухрядный, планетарные передачи, кинематически связанные с валом двигателя, входом и выходом вариатора и выходным валом передачи. Эта передача позволяет получить передний и задний ходы машины с небольшими скоростями с переходом через нейтраль без разрыва кинематической связи, а также движение машины вперед только на вариаторе и два диапазона с повышенными скоростями, использующие обе фазы регулирования передаточного отношения вариатора (см. US Patent №6045477, Apr.4, 2000, F16H 37/02, 475/207). Недостатком этого устройства, принятого за аналог, являются: 1) выполнение вариатора не но планетарной схеме, что существенно снижает КПД передачи на режимах минимальных передаточных отношений вариатора; 2) наличие большого числа вспомогательных зубчатых передач, КПД которых в замкнутой схеме входит в КПД вариатора и существенно снижает КПД всей передачи; 3) недостаточная универсальность устройства, не позволяющая без существенных изменений использование в нем вариаторов другого типа, например планетарных; 4) наличие всего двух достаточно узких диапазонов работы передачи с высоким КПД, которых, согласно расчетам и практическим исследованиям авторов в этой сфере, недостаточно для весьма широкого диапазона передаточных отношений с высоким КПД, необходимого эффективному транспортному средству.
Известен также широкодиапазонный бесступенчатый привод (супервариатор), содержащий корпус, в котором установлен дисковый планетарный вариатор с входным и выходным кинематическими звеньями-валами, управляющий механизм, кинематически связанный с вариатором и включающий согласующую и дифференциальную передачи, причем выходное кинематическое звено вариатора выполнено с возможностью его попеременного соединения с кинематическими звеньями управляющего механизма (см. патент РФ №2311575, F16Н 37/02, 27.11.2007, «Широкодиапазонный бесступенчатый привод (супервариатор)», автор - Гулиа П.В.). Последнее техническое решение принято за прототип, так как обладает максимальной совокупностью общих с изобретением признаков.
Недостатком известного привода, принятого за прототип, является необходимость переключений кинематических связей как согласующей передачи с дифференциальной, так и дифференциальной передачи с входным и выходным валами всего привода, что усложняет конструкцию механизмов управления коробкой передач, кроме того, что вся конструкция рассчитана только на использование дискового планетарного вариатора, где входной вал проходит через весь вариатор по его оси вращения в ту же сторону, что и входное звено вариатора, что делает невозможным использование вариатора других типов, например, где входной и выходной валы вращаются в разные стороны, несоосно и пр.
Задачей изобретения является разработка устройства, где были бы устранены указанные недостатки, а именно была бы устранена необходимость переключений кинематических связей дифференциальной передачи с входным и выходным валами привода, а также чтобы устройство подходило бы не только под различные типы вариаторов, но и других бесступенчатых обратимых передач (то есть таких, где ведущим может быть как входной, так и выходной вал) как механических, так и электрических и гидравлических.
Указанная задача решается тем, что предложен широкодиапазонный бесступенчатый привод (супервариатор), включающий бесступенчатую обратимую передачу с принудительным регулированием передаточного отношения с входными и выходными кинематическим звеньями как бесступенчатой передачи, так и всего привода, причем входное кинематическое звено бесступенчатой передачи выполнено с возможностью периодического соединения с входным кинематическим звеном всего привода, а также управляющий механизм привода, кинематически связанный с упомянутыми звеньями и включающий дифференциальную и согласующую передачи, в котором, согласно изобретению, дифференциальная передача выполнена в виде двух дифференциальных механизмов, постоянно кинематически связанных с входными и выходными кинематическими звеньями бесступенчатой передачи, причем в первом из дифференциальных механизмов с входным звеном бесступенчатой передачи связано водило, а во втором дифференциальном механизме с упомянутым входным звеном бесступенчатой передачи связано одно из центральных колес, а выходное звено бесступенчатой передачи в обоих дифференциальных механизмах связано с обеими незадействованными другими связями внешними или внутренними центральными колесами, при этом согласующая передача, вал которой является выходным звеном всей передачи, выполнена с возможностью периодической кинематической связи ее вала с одним из незадействованных центральных колес первого дифференциального механизма и с водилом второго дифференциального механизма, а передаточные отношения зубчатых пар, образованных кинематической связью дифференциальной передачи с согласующей передачей, выполнены такими, чтобы при крайних (малом и большом) рабочих передаточных отношениях бесступенчатой передачи вращение двух любых ведомых звеньев, соосных с валом согласующей передачи, и вступающих в периодическое одновременное соединение с этим валом, совпадало по частоте и направлению.
Другим отличием устройства является то, что центральные колеса дифференциальной передачи, кинематически связанные с выходным звеном бесступенчатой передачи, установлены на общей обойме.
Еще одним отличием устройства является то, что управляющий механизм привода выполнен с возможностью непосредственной периодической кинематической связи выходного кинематического звена бесступенчатой передачи с валом согласующей передачи при отключении от последнего звеньев дифференциальных механизмов.
Следующим отличием устройства является то, что входное кинематическое звено бесступенчатой передачи выполнено с возможностью периодической кинематической связи с валом согласующей передачи при отключении от него звеньев дифференциальных механизмов.
Следующим отличием устройства является то, что входной вал привода выполнен с возможностью его периодической кинематической связи с входным кинематическим звеном бесступенчатой передачи и проходящей соосно внутри него.
Следующим отличием устройства является то, что на валу согласующей передачи, наряду с другими, помещены с возможностью свободного вращения зубчатые колеса, связанные с зубчатыми колесами, посаженными с передачей крутящего момента на звенья дифференциальной передачи, и периодически связываемые с передачей крутящего момента с вышеуказанным валом.
Следующим отличием устройства является то, что выходное кинематическое звено бесступенчатой передачи выполнено с возможностью периодической связи с валом согласующей передачи через механизм реверса.
Следующим отличием устройства является то, что бесступенчатая передача содержит планетарный вариатор, и ее входное звено соединено с центральным внутренними фрикционными дисками вариатора, а выходное - с его водилом при неподвижных внешних центральных фрикционных дисках вариатора.
Следующим отличием устройства является то, что бесступенчатая передача содержит электровариатор в виде двухроторной электромашины с неподвижными двумя статорами, включающими две группы обмоток, и планетарную передачу, связывающую входное звено и оба ротора, причем ротор, связанный с внешним центральным колесом планетарной передачи, выполнен связанным с общей обоймой дифференциальной передачи управляющего механизма привода.
Следующим отличием устройства является то, что бесступенчатая передача содержит вариатор с промежуточной гибкой связью, причем входное звено бесступенчатой передачи соединено с одним шкивом вариатора, а выходное звено бесступенчатой передачи через механическую передачу соединено со вторым шкивом вариатора, причем механическая передача выполнена соосной и понижающей частоту вращения выходного звена.
Следующим отличием устройства является то, что бесступенчатая передача содержит гидровариатор, вал насоса которого соединен с входным звеном бесступенчатой передачи, а вал гидромотора, связанного с насосом системой управления, соединен с выходным звеном бесступенчатой передачи через механическую передачу, причем механическая передача выполнена соосной и понижающей частоту вращения выходного звена.
Следующим отличием устройства является то, что бесступенчатая передача содержит шаровой вариатор, с одним конусом которого соединено входное звено бесступенчатой передачи, а с другим конусом через механическую передачу соединено выходное звено бесступенчатой передачи, причем механическая передача выполнена соосной и понижающей частоту вращения выходного звена бесступенчатой передачи.
Следующим отличием устройства является то, что бесступенчатая передача содержит торовый вариатор, как минимум с одной чашей которого связано входное звено бесступенчатой передачи, а другой чашей которого, вращающейся в другую сторону, через механическую передачу связано выходное звено бесступенчатой передачи, причем механическая передача выполнена соосной, реверсивной и понижающей частоту вращения выходного звена бесступенчатой передачи в направлении от ее входного к выходному звену.
Благодаря вышеперечисленным отличиям достигается технический результат, заключающийся в упрощении механизма управления передачей, а также в возможности использования вариаторов различных типов.
Техническое решение - устройство представлено на схемах фиг.1-фиг.14, где изображены кинематические схемы устройств в их продольном разрезе.
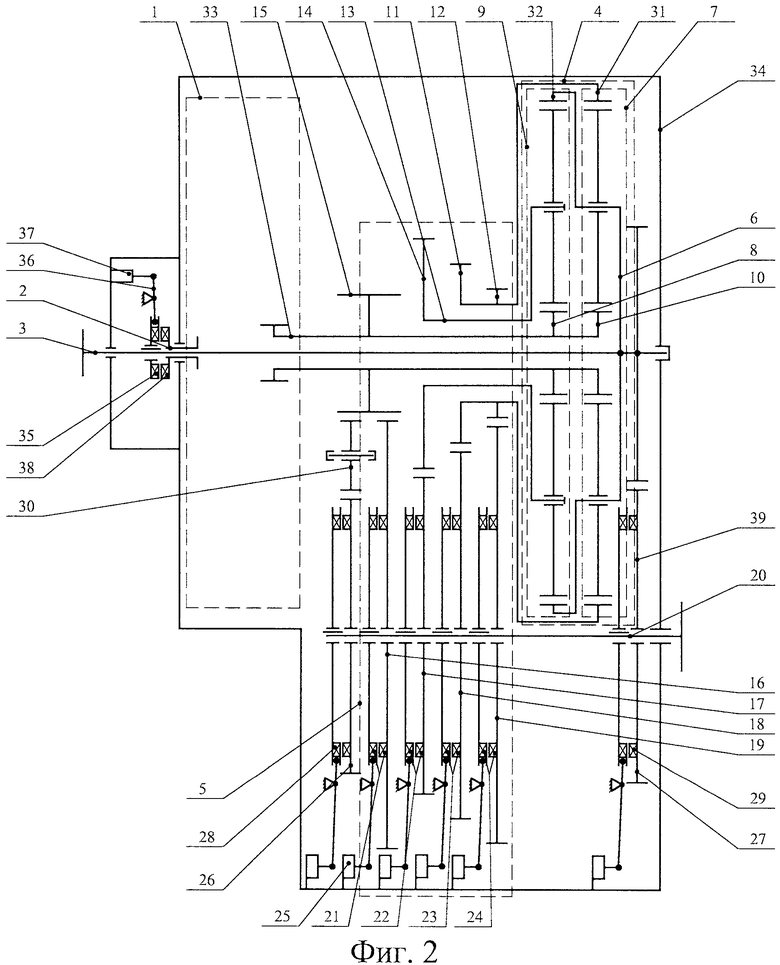
На фиг.1 и фиг.2 представлены принципиальные схемы привода со схематично изображенной бесступенчатой передачей.
На фиг.3 и фиг.4 изображены схемы привода с бесступенчатой передачей, содержащей торовый вариатор.
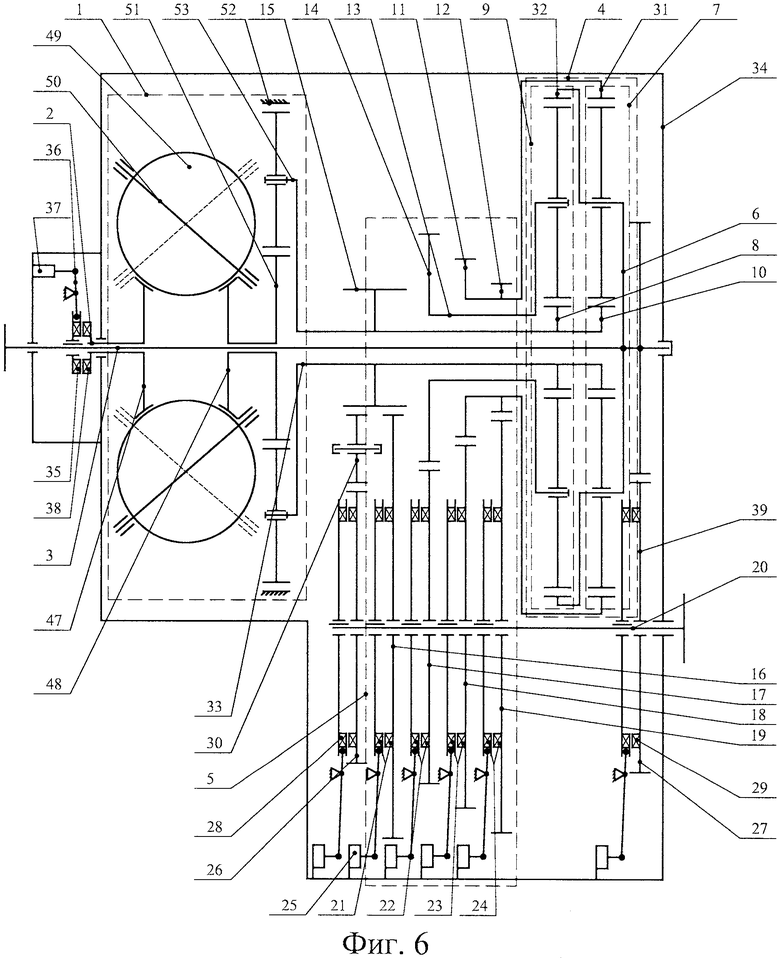
На фиг.5 и фиг.6 изображены схемы привода с бесступенчатой передачей, содержащей шаровой вариатор.
На фиг.7 и фиг.8 изображены схемы привода с бесступенчатой передачей, содержащей вариатор с промежуточной гибкой связью.
На фиг.9 и фиг.10 изображены схемы привода с бесступенчатой передачей, содержащей гидровариатор.
На фиг.11 и фиг.12 изображены схемы привода с бесступенчатой передачей, содержащей электровариатор.
На фиг.13 и фиг.14 изображены схемы привода с бесступенчатой передачей, содержащей планетарный дисковый вариатор.
Устройство (см. фиг.1) состоит из бесступенчатой передачи 1 (обведено штриховой линией), входного звена 2 бесступенчатой передачи 1 и входного звена 3 привода бесступенчатой передачи с дифференциальной передачей 4 (обведено штриховой линией), соединенной своими звеньями с согласующей передачей 5 (обведено штриховой линией). Входное звено 3 (вал привода) через водило 6 дифференциального механизма 7 (обведен штриховой линией) кинематически соединен с внутренним центральным зубчатым колесом 8 дифференциального механизма 9 (обведен штриховой линией), входящего в состав дифференциальной передачи 4. Внутреннее центральное зубчатое колесо 10 дифференциального механизма 7, также входящего в состав дифференциальной передачи 4, кинематически соединено с двумя соосными зубчатыми колесами 11 и 12, а водило 13 дифференциального механизма 9 - с зубчатым колесом 14. Согласующая передача 5 включает в себя зубчатые колеса 15, 14, 11 и 12, соединенные с соответствующими звеньями дифференциальных механизмов 7 и 9, и входящими с ними в постоянное зацепление зубчатыми колесами, соответственно с зубчатыми колесами 16, 17, 18, 19, свободно сидящими на валу 20, являющимся выходным кинематическим звеном привода. Зубчатые колеса 16, 17, 18 и 19 содержат муфты включения, соответственно, 21, 22, 23 и 24, выполненные для поочередного соединения упомянутых зубчатых колес с валом 20. Муфты включения управляются сервоприводом 25, например электромагнитами или гидроцилиндрами. Вал 20 несет на себе также свободно посаженные зубчатые колеса 26 и 27 с возможностью соединения их с валом 20, с помощью соответствующих муфт 28 и 29 включения, аналогичных муфтам 21, 22, 23 и 24, соответственно, обеспечивающие реверс и «прямую» передачу, то есть соединение вала 20 непосредственно с валом 3, минуя бесступенчатую передачу 1. Реверс обеспечивается паразитной шестерней 30, которая меняет направление вращения зубчатого колеса 15 на обратное, сообщая колесу 26 и валу 20 обратное направление вращения. Дифференциальные механизмы 7 и 9 содержат внешние центральные зубчатые колеса, соответственно 31 и 32, расположенные на общей обойме 33, являющейся выходным звеном бесступенчатой передачи 1, с которой соединено зубчатое колесо 15. Все вышеперечисленные механизмы и сервоприводы помещены в корпус 34 с выходящими из него валами 3 и 20. Входной вал 3 привода содержит полумуфту 35, например, кулачковую, закрепленную на нем с возможностью осевого перемещения и передачи крутящего момента, с механизмом ее перемещения, например рычагом 36 с электромагнитом 37. Ответная полумуфта 38 кинематически соединена со входным звеном 2 бесступенчатой передачи 1. "Прямая" передача обеспечивается соединением вала 20 через зубчатую передачу 27-39 с валом 3, минуя бесступенчатую передачу 1.
Возможно выполнение устройства по фиг.2, когда с выходным звеном - общей обоймой 33 бесступенчатой передачи 1 соединены внутренние центральные зубчатые колеса 8 и 10, соответственно, дифференциальных механизмов 9 и 7, внешнее центральное зубчатое колесо 32 дифференциального механизма 9 соединено с валом 3 через водило 6 дифференциального механизма 7, а внешнее центральное зубчатое колесо 31 дифференциального механизма 7 соединено с двумя соосными зубчатыми колесами 11 и 12. Общая обойма 33 в устройстве по фиг.2 проходит внутри устройства, соосно валу 3, а не снаружи, как в схеме по фиг.1. В остальном устройство по фиг.2 аналогично устройству по фиг.1.
Работа предложенной передачи рассматривается на примере управления с ее помощью скоростью движения городского автомобиля, например городского автобуса, с двигателем внутреннего сгорания, коленчатый вал которого соединяется со входным валом 3 привода. Движение начинается при максимальном передаточном отношении бесступенчатой передачи 1. Для получения минимальной скорости автомобиля с выходным валом 20 передачи соединяется с помощью соответствующего сервопривода 25 и муфты включения 21 зубчатое колесо 16, находящееся в постоянном зацеплении с колесом 15, соединенным с выходным кинематическим звеном - общей обоймой 33 бесступенчатой передачи 1.
Для рассматриваемого привода условно приняты следующие передаточные отношения зубчатых передач: колеса 10 с колесом 31, как и колеса 8 с колесом 32 - 1,667; колеса 15 с колесом 16 - 3,14; колеса 14 с колесом 17 - 1,036; колеса 11 с колесом 18 - 1,675; колеса 12 с колесом 19 - 5,655. Передаточные отношения передач, образованных колесами 15-30-26 (реверс) и колесами 39 и 27 («прямая» передача), принципиального значения для работы передачи не имеет и выбираются из желаемой скорости заднего хода (реверс) и максимальной скорости движения на шоссе («прямая» передача). Минимальное передаточное отношение бесступенчатой передачи 1 условно принимаем равным 1,3, а максимальное - 8,2, что обусловлено реальными возможностями соответствующих бесступенчатых передач, описанных ниже.
Исходя из приведенных передаточных отношений, максимальное передаточное отношение рассматриваемой передачи при максимальном передаточном отношении описанных ниже бесступенчатых передач, равном 8,2, и минимальной скорости движения автомобиля равно 25,748, что достаточно много и обеспечивает даже получение «ползучих» скоростей, столь нужных для городского движения. При минимальном передаточном отношении бесступенчатой передачи 1, равном 1,3, общее передаточное отношение передачи уменьшится до 4,083.
Далее для увеличения скорости автомобиля и, соответственно, уменьшения общего передаточного отношения привода используется чередование «прямого» и «обратного» режимов работы привода, суть которых будет изложена ниже, и реальность которых была подтверждена расчетами и испытаниями опытных образцов. Колесо 19, находящееся в зацеплении с колесом 12, соединенном с колесом 10 дифференциального механизма 7, вращается с частотой вращения, равной частоте вращения колеса 16, и при соединении колеса 19 с валом 20 сервоприводом 25 и муфтой 24 включения передачи будет иметь передаточное число, равное таковому в конце предыдущего режима, а именно - 4,083. Таким образом, муфта 24 включения может быть включена без выключения муфты 21, то есть безударно и без разрыва потока мощности, что является очень ценным свойством передачи. Затем муфта 21 включения выключается и остается включенной только муфта 24. При этом вал 20 соединен только с колесом 19. Теперь передаточное отношение бесступенчатой передачи 1 снова повышается. Общее же передаточное число привода при этом снова понижается, и при достижении передаточным отношением бесступенчатой передачи 1 максимального значения 8,2 принимает значение 2,296. Такой режим, когда при увеличении передаточного отношения вариатора общее передаточное отношение привода уменьшается, и обратно, когда при уменьшении первого увеличивается второе, называется «обратным» режимом. Режим, когда при изменении передаточного отношения бесступенчатой передачи 1 в какую-либо сторону общее передаточное отношение передачи изменяется в ту же сторону, называется «прямым» режимом. «Прямой» и «обратный» режимы работы описываемого привода обычно чередуются, и после вышеописанного «обратного» режима, заканчивающегося на общем передаточном отношении 2,296, следует «прямой» режим, начинающийся с этого передаточного отношения. При этом вал 20 муфтой включения 22 и сервоприводом 25 соединяется с колесом 17, которое вращается с той же частотой, что и колесо 19, а следовательно, и вал 20. Соединение происходит, как и в предыдущем случае, безударно и без разрыва потока мощности. После отключения муфтой 24 вала 20 от колеса 19 бесступенчатая передача 1 снова переводится в положение минимального передаточного отношения, т.е. с 8,2 до 1,3, и при этом общее передаточное отношение привода также уменьшается, но уже с 3,296 до 1,21. Затем следует еще один «обратный» режим, снова уменьшающий передаточное отношение передачи с 1,21 до 0,68 при увеличении передаточного отношения бесступенчатой передачи 1 с 1,3 до 8,2. Для этого вал 20 соединяется муфтой 23 включения с колесом 18, после чего муфта 22 отключается. Итак, общее передаточное отношение передачи меняется от 25,748 до 0,68 и диапазон изменения передаточного отношения равен 37,86; при этом бесступенчатая передача 1, соединенная кинематически колесами 15 и 16 с валом 20 без дифференциальных механизмов 7 и 9, т.е. без «прямого» и «обратного» режимов, обеспечивает диапазон, равный 6,3 (8,2:1,3). «Прямой» и «обратный» режимы с привлечением дифференциальных механизмов 7 и 9 обеспечивают диапазон изменения передаточных отношений, примерно равный 6. Однако упомянутые «прямой» и «обратный» режимы, сужая диапазон изменения передаточных отношений привода с 6,3 примерно до 1,8, повышают согласно теории приводов с замкнутой кинематической цепью (см., например, Пронин Б.А., Ревков Г.А., «Вариаторы», М., Машиностроение, 1980, с.299-307, раздел 8.3 «Приводы с замкнутой кинематической цепью») и испытаниям опытных образцов приводов («супервариаторов») КПД приводов. При этом если на режиме трогания автомобиля с места и на «ползучих» скоростях допустим невысокий КПД трансмиссии, то на повышенных скоростях движения, где реализуется высокая мощность двигателя, необходим высокий КПД трансмиссии. Сужение диапазона изменения передаточных отношений коробки передач применением дифференциальных механизмов 7 и 9 позволяет повысить КПД привода, практически независимо от ее передаточного отношения. Это особенно ценно для гибридных силовых агрегатов, где используется рекуперативное торможение и энергия проходит через трансмиссию дважды - в прямом и обратном направлениях. Следует отметить, что для увеличения общего диапазона изменения передаточных отношений число ступеней в согласующей передаче 5 может быть увеличено, а для уменьшения - снижено.
Для движения автомобиля с повышенными скоростями, допустим, городского автобуса по шоссе при его перегонах и т.д., может быть включена «прямая» передача путем соединения колеса 27 с валом 20 соответствующей муфтой 29 включения, а колесо 27 кинематически соединено с входным валом 3, а стало быть и с коленчатым валом двигателя через колесо 39. Двигатель при этом может развить максимальные частоты вращения, нежелательные для бесступенчатой передачи 1 в нагруженном режиме и безвредные при его холостом вращении. Например, для привода автобуса от дизельного двигателя при включенной бесступенчатой передачи 1 используются частоты вращения до 2000 мин-1, а при включенной «прямой» передаче - максимальная частота вращения 2600 мин-1 и более.
При необходимости в заднем ходе вал 20 соединяется соответствующей муфтой 28 включения только с колесом 26, приводимым от колеса 15 через паразитную шестерню 30, меняющую направление вращения.
Совершенно аналогично происходит работа и устройства по фиг.2, где с выходным звеном бесступенчатой передачи 1 - общей обоймой 33 соединены внутренние центральные зубчатые колеса 8 и 10, а с согласующей передачей 5, т.е. с выходным валом 20, кинематически соединены внешнее центральное зубчатое колесо 31 и водило 13. При этом диапазон варьирования всего привода несколько снижается, но зато повышается его КПД.
На фиг.3 и фиг.4 представлена схема устройства с бесступенчатой передачей 1, в частности, с торовым вариатором. Торовый вариатор представляет собой две торовые чаши 40 и 41, соединенные кинематически между собой по внутренней тороидальной поверхности двумя и более поворачивающимися дисками 42 с принудительным управлением их поворота. Чаша 40 сидит на входном кинематическом звене 2 бесступенчатой передачи 1 с возможностью вращения, а на вал 3 также посажена чаша 41. При вращении звена 2 с чашей 40 на нем чаша 41 вращается, приводимая дисками 42 путем трения, в противоположную сторону. При положении дисков 42, показанном сплошной линией, передаточное отношение минимальное (повышающее), а при положении, показанном штриховой линией, - максимальное (понижающее). Чаша 41 несет на себе внутреннее центральное зубчатое колесо 43, входящее в зацепление с одной или более паразитными шестернями 44 с неподвижными осями 45. Паразитные шестерни 44 входят в зацепление с зубчатым колесом 46 с внутренним зацеплением, связанным с общим эпициклом 33 дифференциальной передачи 4, которое получает вращение в направлении, противоположном колесу 43, то есть в направлении вращения входного кинматического звена 2 (см. фиг.1 и фиг.2). При этом - передача колесами 43-44-46 понижающая, и ее передаточное число выбрано так, чтобы для соответствия вышеприведенному примеру общее передаточное отношение бесступенчатой передачи составляло: минимальное 1,3, а максимальное - 8,2. Для этого понижающее передаточное отношение зубчатых передач должно быть около 3,25, что вполне реализуемо. Таким образом, комбинация торового вариатора и реверсивного зубчатого механизма, описанная выше, вполне соответствует своему назначению и параметрам, согласно описанию к фиг.1, и работе этого устройства.
На фиг.5 и фиг.6 представлена схема устройства с бесступенчатой передачей 1, в частности, с шаровым вариатором. Вариатор представляет собой два конуса 47 и 48, кинематически соединенные между собой двумя и более шарами 49, вращающимися вокруг оси 50, с возможностью ее принудительного поворота. Крайние положения поворота оси 50 представлены сплошной и штриховой линиями. Конус 47 посажен на входном кинематическом звене 2 бесступенчатой передачи 1, а конус 48 - на валу 3 с возможностью свободного вращения. Механизм связи выходного звена вариатора - конуса 48 с общим эпициклом 33 дифференциальной передачи 4 выполнен в виде планетарного механизма с центральным внутренним колесом 51, связанным с конусом 48, неподвижным центральным внешним колесом 52, и водилом 53, связанным с общей обоймой 33 дифференциальной передачи 4 (см. фиг.1 и фиг.2). Передаточное число планетарного механизма выбирается, как и в предыдущем случае, - около 3,25, что при реальных параметрах шарового вариатора обеспечит необходимые передаточные отношения бесступенчатой передачи 1.
На фиг.7 и фиг.8 представлена схема устройства с бесступенчатой передачей 1, в частности с вариатором, выполненным с промежуточной гибкой связью - ременной или цепной. Два конических раздвижных по оси шкива 54 и 55 связаны между собой гибкой связью 56 - ремнем или цепью. Передаточное отношение вариатора изменяется раздвижением одного шкива при сдвигании второго. На входном звене 2 свободно сидит шкив 54, ведомым звеном является шкив 55. При раздвинутом шкиве 54 и сдвинутом 55 передаточное отношение вариатора минимально; в противоположном случае - максимально. Механизм связи ведомого звена бесступенчатой передачи 1 с общей обоймой 33 дифференциальной передачи 4 представляет со шкивом 55 понижающую реверсивную передачу из шестерни 57 на шкиве 55, колеса 58, сидящего на входном валу 3 с возможностью вращения, и паразитной шестерни 59 между ними. Это обеспечивает вращение колеса 58, связанного с общей обоймой 33 дифференциальной передачи 4 в ту же сторону, что и шестерня 57, с понижением его частоты вращения, в данном случае примерно в 3,25 раза (см. фиг1 и фиг.2). Это соответствует как реальным возможностям вариатора, так и выбранным параметрам дифференциальной передачи 4 и согласующей передачи 5, а также обеспечит необходимые передаточные отношения бесступенчатой передачи 1.
Все приведенные выше вариаторы подробно описаны в цитированной выше книге Б.А.Пронина и Г.А.Ревкова «Вариаторы».
Вариатором в общем случае называется устройство, позволяющее плавное и бесступенчатое регулирование (варьирование) его передаточного отношения. Такую задачу выполняют, кроме механических устройств, также гидро- и электровариаторы. Гидровариаторы состоят из гидронасоса объемного действия, регулируемой производительности, и объемного же действия гидромотора как регулируемой, так и нерегулируемой производительности, связанных системой управления, например, золотниковой. Электровариаторы состоят из генератора и электродвигателя, связанных системой управления, например, частотной. Направление вращения выходного звена - вала гидро- или электромотора можно всегда иметь совпадающим по направлению с ведущим валом, а частоту вращения - пониженной в необходимое число раз.
На фиг.9 и фиг.10 представлена схема устройства с бесступенчатой передачей 1, в частности с гидровариатором. Здесь ведущее звено - насос 60 - приводится входным звеном 2 бесступенчатой передачи 1. Оно связано системой управления 61 с ведомым звеном 62 бесступенчатой передачи 1 - гидромотором. На валу ведомого звена 62 посажена шестерня 63, а на валу 3 с возможностью вращения - колесо 64, находящееся в зацеплении с шестерней 63 и соединенное с общей обоймой 33 дифференциальной передачи 4 (см. фиг.1 и фиг.2). Передаточное отношение передачи колес 63-64 выбирается в зависимости от возможностей гидровариатора с тем расчетом, чтобы общая обойма 33 варьировала свою частоту вращения, начиная с наибольшего передаточного числа 8,2, и заканчивала наименьшим - 1,3 по отношению к вращению входного вала 3 (для соответствия приведенным выше расчетным данным по дифференциальной передаче 4 и согласующей передаче 5) (см. Б.А.Гавриленко и др., «Гидравлический привод», М., Машиностроение, с.453-458).
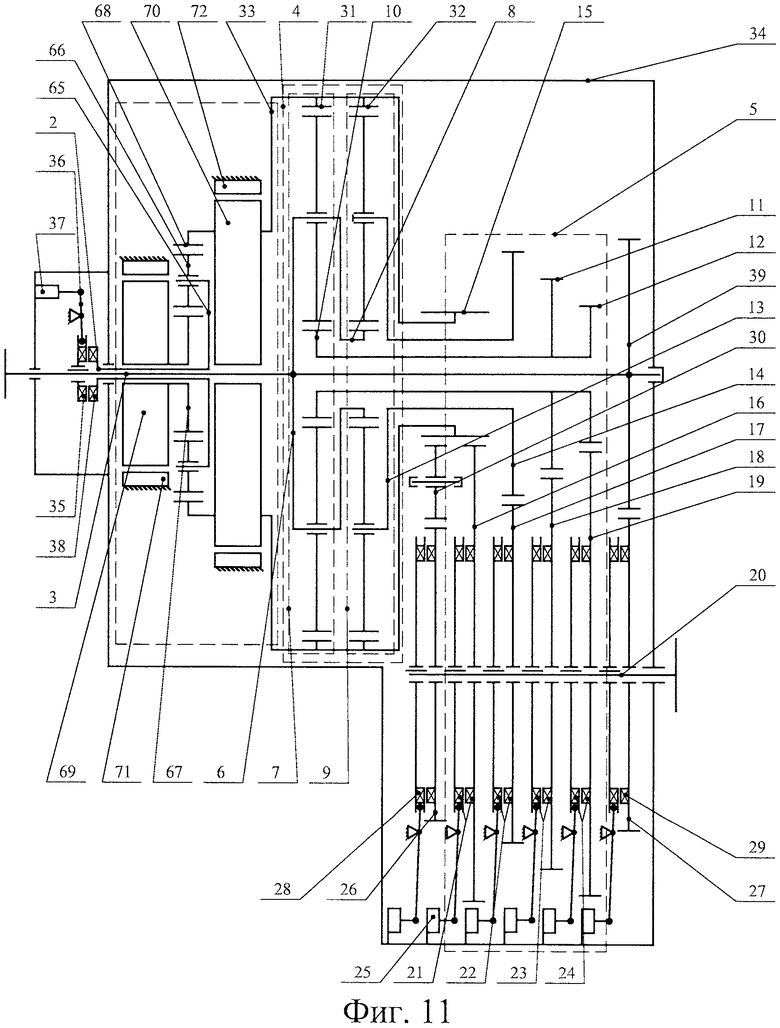
На фиг.11 и фиг.12 представлена схема устройства с бесступенчатой передачи 1, в частности с электромеханической бесступенчатой передачей (подобная использовалась в бесступенчатом приводе гибридного автомобиля «Тойота-Приус»). Входной вал 3 всего устройства выполнен с возможностью соединения с водилом 65 зубчатой планетарной передачи через входное звено 2 бесступенчатой передачи 1. Сателлиты 66, закрепленные с возможностью вращения на водиле 65, осуществляют кинематическую связь между центральными зубчатыми колесами - внутренним 67 и внешним 68. Колесо 67 соединено со входным кинематическим звеном 3 бесступенчатой передачей 1, а стало быть, и ротором 69, а колесо 68 - с ротором 70 - выходным кинематическим звеном бесступенчатой передачи 1. Статоры 71 и 72 перераспределяют крутящий момент между роторами 69 и 70, обеспечивая необходимое передаточное отношение бесступенчатой передачи 1 под нагрузкой. Выходное кинематическое звено - ротор 70 - соединено с общей обоймой 33, а входное 2 через вал 3 - с водилом 6 дифференциальной передачи 4.
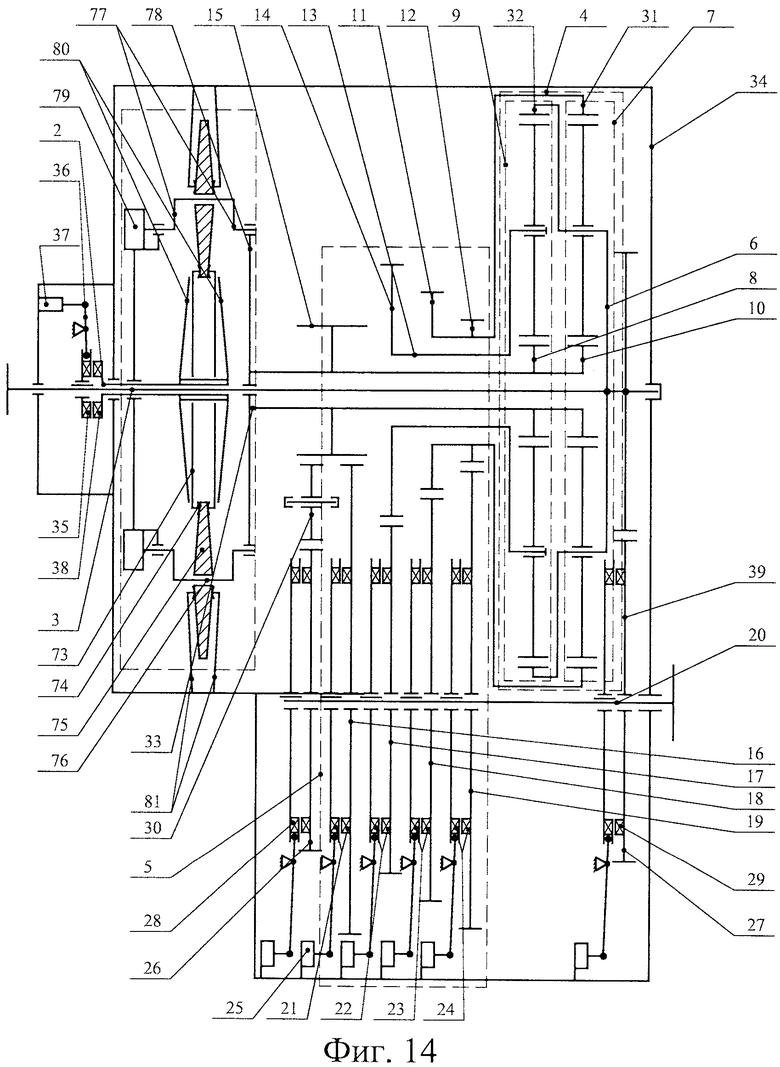
Вместо электровариатора в данной схеме может быть применен любой соосный вариатор, входное и выходное звенья которого вращаются в одну сторону и выходное звено вращается медленнее входного - гидравлический или фрикционный, в том числе и планетарные вариаторы. На фиг.13 и фиг.14 представлена схема устройства с бесступенчатой передачей 1, в частности, с наиболее подходящим для нее планетарным дисковым вариатором. Вариатор - он же бесступенчатая передача - содержит входное кинематическое звено 2, соединенное с возможностью передачи крутящего момента с внутренними центральными фрикционными дисками 73 (на фиг.13 и фиг.14 изображен один их ряд, содержащий одну пару фрикционных дисков, хотя таких рядов может быть и несколько). Внутренние центральные фрикционные диски 73 контактируют своими рабочими кольцевыми зонами 74 с коническими сателлитами 75, сидящими с возможностью свободного вращения на осях 76 на поворотных рычагах 77, закрепленных с возможностью поворота в водиле 78. Водило 78 является выходным кинематическим звеном как вариатора, так и бесступенчатой передачи 1, соединенной с общей обоймой 33 (см. фиг.1 и фиг.2).
Сателлиты 75 равномерно расположены по окружности в количестве, равном трем и более, контактируют также с внешними центральными фрикционными дисками 79, прижатыми к ним, например, силой собственной упругости в осевом направлении, либо любыми другими нажимными устройства. Внутренние центральные фрикционные диски 73 прижаты к сателлитам 75 дополнительными упругими элементами, например, тарельчатыми пружинами 80, либо другими устройствами, используемыми в вариаторах (см., например, Пронин Б.А., Ревков Г.А. «Вариаторы», М., Машиностроение, 1980, с.197-200, раздел «Нажатие»). Поворотные рычаги 77 связаны с водилом 78 сервоприводом 79, например, гидромоторами, поворачивающимися на определенные углы поворотными рычагами 77. Благодаря эксцентриситету в них осуществляется радиальное перемещение сателлитов 75 относительно центральных фрикционных дисков - внутренних 73 и внешних 81, чем изменяется передаточное отношение вариатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2523508C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2428607C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2428608C2 |
| ДВУХРЕЖИМНЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД-СУПЕРВАРИАТОР (ЕГО ВАРИАНТЫ) | 2008 |
|
RU2373445C1 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2523507C2 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2523506C2 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ (ВАРИАНТЫ) | 2011 |
|
RU2483940C1 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2003 |
|
RU2311575C2 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2464182C2 |









Изобретение относится к транспортному машиностроению и может быть использовано в качестве бесступенчатой коробки передач автомобильных и других транспортных средств. Привод содержит бесступенчатую обратимую передачу (1), управляющий механизм привода, включающий дифференциальную передачу (4) и согласующую передачу (5). Дифференциальная передача (4) состоит из двух дифференциальных механизмов (7, 9), кинематически связанных с бесступенчатой передачей (1). В первом дифференциальном механизме (7) с выходным звеном бесступенчатой передачи (1) связано водило (6). Во втором дифференциальном механизме (9) с входным звеном бесступенчатой передачи (1) связано одно из центральных колес (8). Согласующая передача (5) периодически связывает ее вал с одним из центральных колес первого дифференциального механизма (7) и с водилом второго дифференциального механизма (9). Передаточные отношения зубчатых пар, образованных кинематической связью дифференциальной и согласующей передачами, выполнены такими, чтобы вращение двух любых ведомых звеньев, соосных с валом согласующей передачи (5) и вступающих в периодическое соединение с этим валом, совпадало по частоте и направлению. Изобретение позволяет упростить механизм управления передачи и обеспечить возможность использования в составе привода любых известных типов вариаторов. 12 з.п. ф-лы, 14 ил.
1. Широкодиапазонный бесступенчатый привод (супервариатор), включающий бесступенчатую обратимую передачу с принудительным регулированием передаточного отношения с входными и выходными кинематическими звеньями как бесступенчатой передачи, так и всего привода, причем входное кинематическое звено бесступенчатой передачи выполнено с возможностью периодического соединения с входным кинематическим звеном всего привода, а также управляющий механизм привода, кинематически связанный с упомянутыми звеньями и включающий дифференциальную и согласующую передачи, отличающийся тем, что дифференциальная передача выполнена в виде двух дифференциальных механизмов, постоянно кинематически связанных с входными и выходными кинематическими звеньями бесступенчатой передачи, причем в первом из дифференциальных механизмов с входным звеном бесступенчатой передачи связано водило, а во втором дифференциальном механизме с упомянутым входным звеном бесступенчатой передачи связано одно из центральных колес, а выходное звено бесступенчатой передачи в обоих дифференциальных механизмах связано с обеими незадействованными другими связями внешними или внутренними центральными колесами, при этом согласующая передача, вал которой является выходным звеном всей передачи, выполнена с возможностью периодической кинематической связи ее вала с одним из незадействованных центральных колес первого дифференциального механизма и с водилом второго дифференциального механизма, а передаточные отношения зубчатых пар, образованных кинематической связью дифференциальной передачи с согласующей передачей выполнены такими, чтобы при крайних (малом и большом) рабочих передаточных отношениях бесступенчатой передачи вращение двух любых ведомых звеньев, соосных с валом согласующей передачи и вступающих в периодическое одновременное соединение с этим валом, совпадало по частоте и направлению.
2. Привод по п.1, отличающийся тем, что центральные колеса дифференциальной передачи, кинематически связанные с выходным звеном бесступенчатой передачи, установлены на общей обойме.
3. Привод по п.1, отличающийся тем, что управляющий механизм привода выполнен с возможностью непосредственной периодической кинематической связи выходного кинематического звена бесступенчатой передачи с валом согласующей передачи при отключении от последнего звеньев дифференциальных механизмов.
4. Привод по п.1, отличающийся тем, что входное кинематическое звено бесступенчатой передачи выполнено с возможностью периодической кинематической связи с валом согласующей передачи при отключении от него звеньев дифференциальных механизмов.
5. Привод по п.1, отличающийся тем, что входной вал привода выполнен с возможностью его периодической кинематической связи с входным кинематическим звеном бесступенчатой передачи, проходящей соосно внутри него.
6. Привод по п.1, отличающийся тем, что на валу согласующей передачи помещены с возможностью свободного вращения зубчатые колеса, связанные с зубчатыми колесами, посаженными с передачей крутящего момента на звенья дифференциальной передачи, и периодически связываемые с передачей крутящего момента с вышеуказанным валом.
7. Привод по п.1, отличающийся тем, что выходное кинематическое звено бесступенчатой передачи выполнено с возможностью периодической связи с валом согласующей передачи через механизм реверса.
8. Привод по п.1, отличающийся тем, что бесступенчатая передача содержит планетарный вариатор, и ее входное звено соединено с центральными внутренними фрикционными дисками вариатора, а выходное - с его водилом при неподвижных внешних центральных фрикционных дисках вариатора.
9. Привод по п.1 или 2, отличающийся тем, что бесступенчатая передача содержит электровариатор в виде двухроторной электромашины с неподвижными двумя статорами, включающими две группы обмоток, и планетарную передачу, связывающую входное звено и оба ротора, причем ротор, связанный с внешним центральным колесом планетарной передачи, выполнен связанным с общей обоймой дифференциальной передачи управляющего механизма привода.
10. Привод по п.1, отличающийся тем, что бесступенчатая передача содержит вариатор с промежуточной гибкой связью, причем входное звено бесступенчатой передачи соединено с одним шкивом вариатора, а выходное звено бесступенчатой передачи через механическую передачу соединено со вторым шкивом вариатора, причем механическая передача выполнена соосной и понижающей частоту вращения выходного звена.
11. Привод по п.1, отличающийся тем, что бесступенчатая передача содержит гидровариатор, вал насоса которого соединен с входным звеном бесступенчатой передачи, а вал гидромотора, связанного с насосом системой управления, соединен с выходным звеном бесступенчатой передачи через механическую передачу, причем механическая передача выполнена соосной и понижающей частоту вращения выходного звена.
12. Привод по п.1, отличающийся тем, что бесступенчатая передача содержит шаровой вариатор, с одним конусом которого соединено входное звено бесступенчатой передачи, а с другим конусом через механическую передачу соединено выходное звено бесступенчатой передачи, причем механическая передача выполнена соосной и понижающей частоту вращения выходного звена бесступенчатой передачи.
13. Привод по п.1, отличающийся тем, что бесступенчатая передача содержит торовый вариатор, как минимум с одной чашей которого связано входное звено бесступенчатой передачи, а другой чашей которого, вращающейся в другую сторону, через механическую передачу связано выходное звено бесступенчатой передачи, причем механическая передача выполнена соосной, реверсивной и понижающей частоту вращения выходного звена бесступенчатой передачи в направлении от ее входного к выходному звену.
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2003 |
|
RU2311575C2 |
| DE 10205752 A1, 13.02.2003 | |||
| DE 102006059210 A1, 26.06.2008 | |||
| US 6045477 A, 04.04.2000 | |||
| DE 3924548 A1, 27.09.1990. | |||

