Изобретение относится к механизмам зубчатых бесступенчатых передач и может быть использовано в машиностроении, в частности для бесступенчатой трансмиссии транспортных средств вместо применяемых коробок перемены передач. Вариатор планетарный предназначен для полуавтоматического плавного бесступенчатого регулирования передаточного числа между ведущим валом приводного двигателя и выходным звеном вариатора, в зависимости от внешней нагрузки на выходном звене вариатора.
Известен вариатор планетарный бесступенчатый по патенту Российской Федерации №2095665, кл. F16Н 3/72, 1997 г., содержащий соосные ведущий и ведомый валы, два планетарных ряда, каждый из которых включает малое и большое центральные колеса и водило с сателлитами, механизм управления и тормоза. Механизм управления выполнен в виде электрической машины, ротор-маховик которой установлен с возможностью вращения на ведущем валу и выполнен в виде цилиндра со встроенными по периферии постоянными магнитами, расположенными между неподвижными обмотками статора, включенными в электрически регулируемую цепь. При этом большое и малое центральные колеса первого планетарного ряда жестко установлены соответственно на ведомом и ведущем валах, из которых большое центральное колесо связано с тормозом. Большое и малое центральные колеса второго планетарного ряда установлены с возможностью вращения на ведущем валу, из которых большое центральное колесо жестко связано с водилом первого планетарного ряда и со вторым тормозом. Малое центральное колесо посредством фрикционного элемента жестко связано с ротором-маховиком, а водило с сателлитами этого же планетарного ряда жестко закреплено на ведущем валу.
Основными недостатками являются: необоснованная кинематическая схема передачи крутящего момента на ведомое звено через звенья планетарных рядов от приводного двигателя. В данной кинематической схеме проигнорированы передаточные отношения и направления потоков энергии от приводного двигателя и электродвигателя электрической машины. Энергии двух двигателей используются нерационально и вступают в противодействие. Энергия, получаемая на ведомом выходном валу, изменяется не в расчете на передаточное число вариатора, а за счет повышения КПД вариатора, которое принимает значения от 0% до ~80%. Т.е. в данной кинематической схеме вариатора имеет место большая потеря энергии приводного двигателя. Максимальная передача энергии должна происходить при максимальной подаче энергии от приводного и электрического двигателей, при этом расчетное передаточное число вариатора составит 1, т.е. отсутствует диапазон изменения передаточного числа.
Известен бесступенчатый замкнутый планетарный гидромеханический вариатор по патенту Российской Федерации №2106555, кл. F16Н 47/08, 1998 г., принятый заявителем за прототип. Он содержит ведущий и ведомый валы, гидротрансформатор и два планетарных ряда, первый из которых включает соединенную с ведомым валом эпициклическую шестерню, солнечную и центральную шестерни и соединенное с ведущим валом водило с двухвенцовыми сателлитами, второй планетарный ряд включает соединенную с турбинным колесом гидротрансформатора эпициклическую шестерню, солнечную шестерню и соединенное с ведомым валом водило с парными сателлитами, солнечные шестерни обоих планетарных рядов соединены между собой промежуточным валом. Центральная шестерня соединена с насосным колесом гидротрансформатора, а его реактор - с ведомым валом.
Однако этот вариатор обладает рядом недостатков, основные из которых:
1. Необосновано применение кинематической схемы устройства. Проигнорированы передаточные отношения и направления потоков энергии между планетарными рядами вариатора.
2. Необосновано значение КПД устройства. Энергия приводного двигателя расходуется внутри устройства. С повышением оборотов приводного двигателя повышается КПД устройства. КПД устройства достигает максимального значения на прямой передаче, т.е. при равном значении оборотов всех колес гидротрансформатора. При этом значение КПД лежит в пределах от 0% до ~85%.
3. Необосновано передаточное отношение устройства. Передаточные отношения между звеньями планетарных рядов не оказывают никакого влияния на энергию на выходном ведомом звене устройства. Эта энергия зависит от КПД устройства в определенный момент времени. Максимальное передаточное отношение устройства при максимальном КПД составит 1. В связи с этим необходимо использовать приводной двигатель с большой мощностью для преодоления максимального стартового нагрузочного момента на ведомом звене, хотя эксплуатация такой энергетической установки: приводной двигатель плюс устройство-прототип экономически и энергетически не оправдана из-за низкого КПД всей энергетической установки.
4. Невозможность регулирования передаточного числа устройства извне от автономного регулятора для снижения энергетических затрат приводного двигателя на установившихся режимах работы.
Технической задачей предлагаемого изобретения является создание вариатора планетарного с высоким коэффициентом полезного действия (КПД), большим диапазоном регулирования общего передаточного числа, с возможностью изменения передаточного числа в независимости от оборотов приводного двигателя и с возможностью самоадаптации передаточного числа вариатора из-за воздействия различных внешних нагрузок.
Поставленная задача решается тем, что в предлагаемом решении вариатор снабжен подвижным управляющим звеном, которое кинематически связано с первым и вторым планетарными рядами, а первый и второй планетарные ряды размещены последовательно, каждый из которых включает центральную шестерню, коронное колесо и водило с сателлитами, а ведущий вал жестко связан с коронным колесом первого планетарного ряда и выполнен сквозным с возможностью установки приводного двигателя на любой его конец, а механизм управления выполнен с приводом от ведущего вала, размещен на ведущем валу, неподвижно закреплен на корпусе и выполнен в виде гидравлического тормоза для подвижного управляющего звена, причем механизм управления содержит контролирующий и исполнительный органы и выполнен с возможностью изменения общего передаточного числа вариатора в независимости от оборотов приводного двигателя и автоматического изменения передаточного числа вариатора в зависимости от нагрузки на ведомой шестерне вариатора без фрикционного трения.
Кроме того, контролирующий орган механизма управления содержит насос низкого и насос высокого давления для гидравлической жидкости со следящим запорным клапаном и подвижной муфтой, причем привод насосов низкого и высокого давления выполнен посредством ведущего вала, а исполнительный орган механизма управления содержит расчетное количество плунжерных пар, которые установлены с возможностью воздействия на подвижное управляющее звено посредством плунжеров в зависимости от давления гидравлической жидкости, созданного следящим запорным клапаном и подвижной муфтой.
Кроме того, подвижное управляющее звено кинематически связано с первым и вторым планетарными рядами, причем первый и второй планетарные ряды соединены между собой посредством двух жестких связей, первая из которых выполнена в виде жесткого соединения подвижного управляющего звена с водилом первого планетарного ряда и центральной шестерней второго планетарного ряда, вторая выполнена в виде жесткого соединения центральной шестерни первого планетарного ряда с водилом второго планетарного ряда.
На Фиг.1 изображена общая кинематическая схема вариатора планетарного.
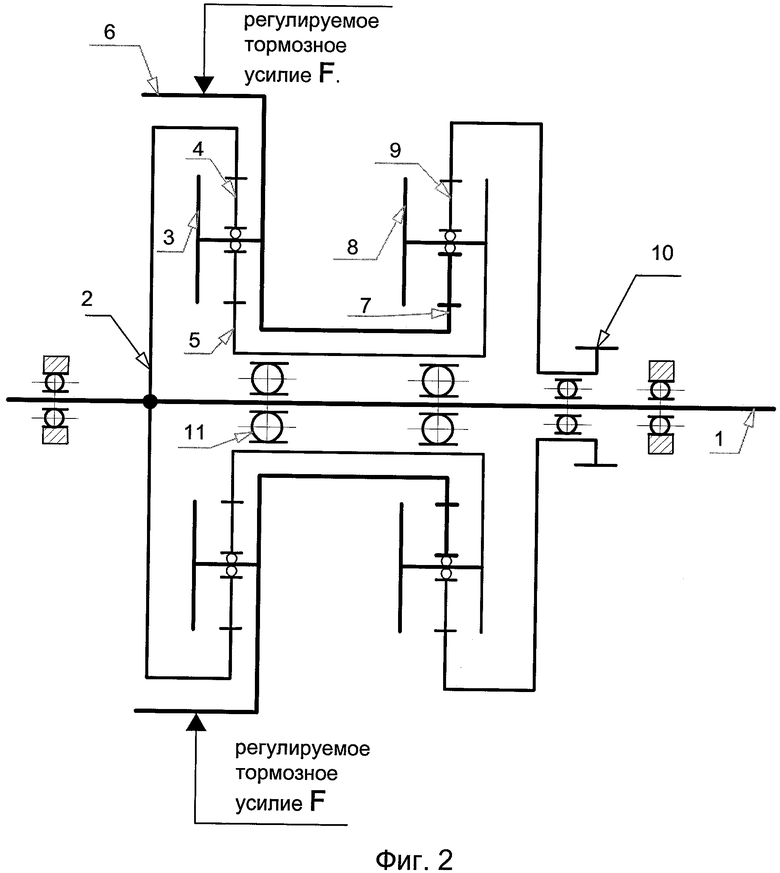
На Фиг.2 изображена принципиальная схема механической части вариатора.
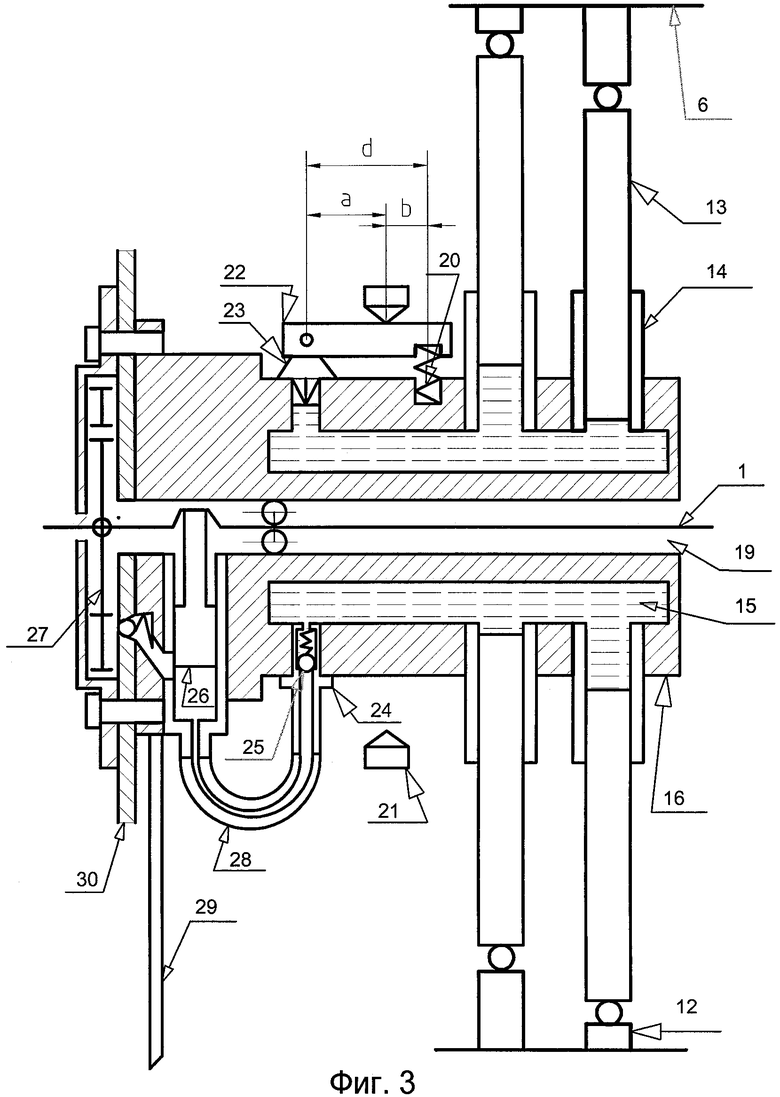
На Фиг.3 изображена схема механизма управления.
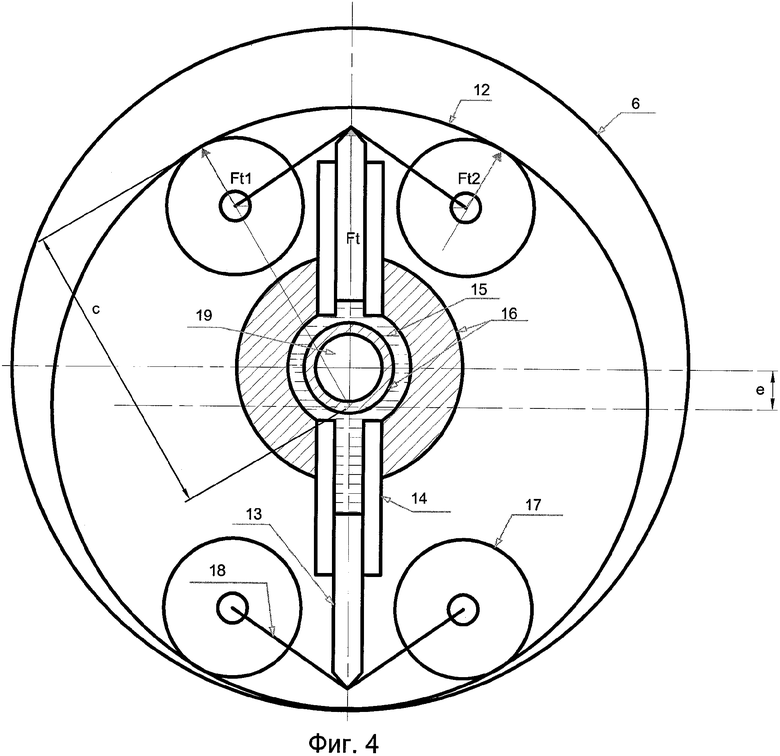
На Фиг.4 - принципиальная схема исполнительного органа механизма управления.
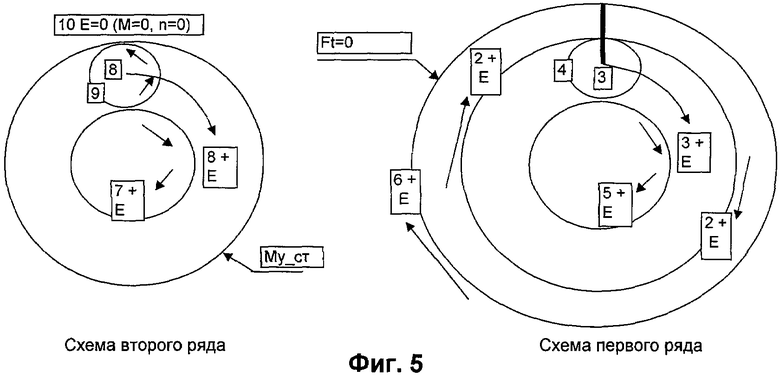
На Фиг.5 - схема прохождения крутящего момента через планетарные ряды вариатора при Ft=0 Н.
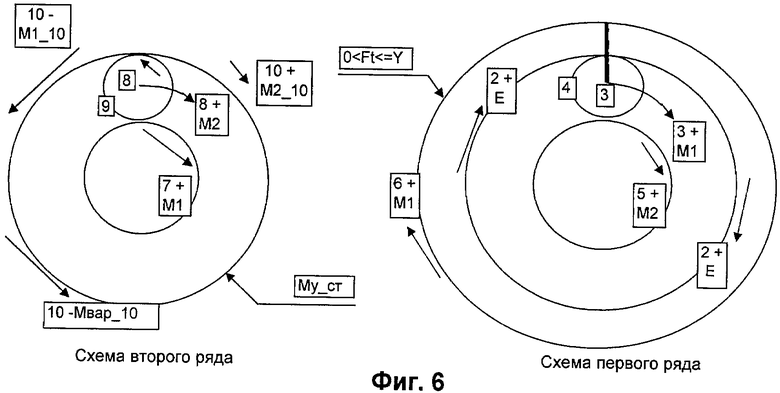
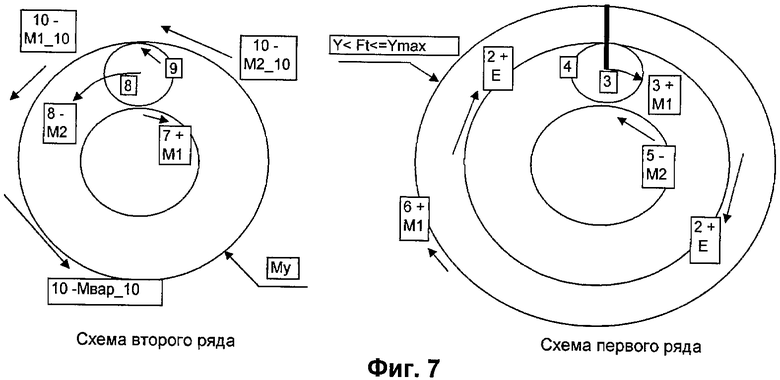
На Фиг.6 - схема прохождения крутящего момента через планетарные ряды вариатора при возрастании Ft: 0 Н<Ft<=Y H.
На Фиг.7 - схема прохождения крутящего момента через планетарные ряды вариатора при максимальном возрастании Ft: Y H<Ft<=Ymax H.
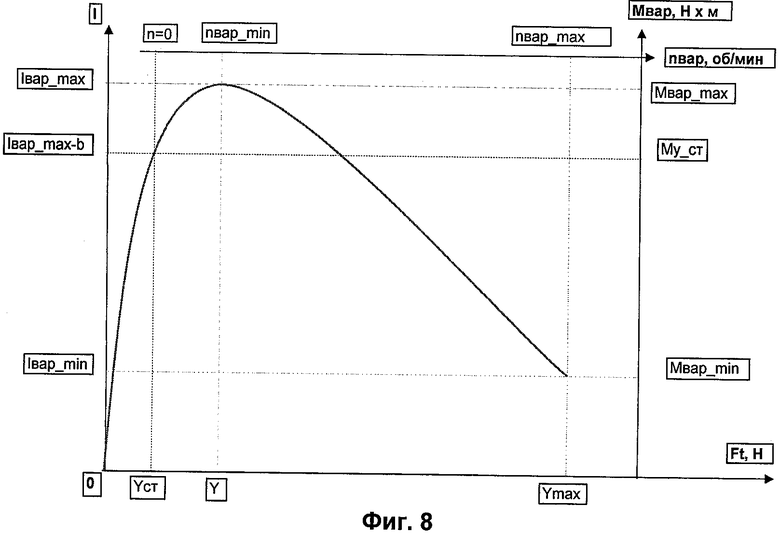
На Фиг.8 - график зависимости передаточного числа вариатора, крутящего момента и числа оборотов на выходном звене вариатора от силы торможения Ft, действующей на управляющее звено вариатора при постоянном крутящем моменте и постоянных оборотах на выходном валу приводного двигателя.
Вариатор планетарный содержит ведущий вал 1, который выполнен сквозным и с возможностью установки приводного двигателя на любой его конец. На ведущем валу 1 размещены ведущая коронная шестерня 2, водило 3 первого планетарного ряда, сателлит 4 первого планетарного ряда и центральная шестерня 5 первого планетарного ряда, составляющие первый планетарный ряд. Вариатор снабжен управляющим звеном 6, имеющим форму кольца.
Во второй планетарный ряд входят центральная шестерня 7 второго планетарного ряда, водило 8 второго планетарного ряда, сателлит 9 второго планетарного ряда, ведомая шестерня 10, являющаяся одновременно коронной шестерней второго планетарного ряда.
Ведущий вал 1, центральная шестерня 5 первого планетарного ряда и ведомая шестерня 10 установлены на подшипниках 11.
Планетарные ряды вариатора соединены между собой следующим образом.
Управляющее звено 6 в первом планетарном ряду жестко связано с водилом 3 первого планетарного ряда и центральной шестерней 7 второго планетарного ряда. А центральная шестерня 5 первого планетарного ряда и водило 8 второго планетарного ряда жестко соединены между собой.
Такая конструкция вариатора, при вращении по часовой стрелке ведущего вала 1 с жестко закрепленной на нем ведущей коронной шестерней 2, позволяет вращаться, в свою очередь, ведомой шестерне 10 против часовой стрелки. Т.е. вращение ведущего и ведомого звеньев происходит в противоположные стороны при остановленном или не полностью остановленном управляющем звене 6.
Механизм управления выполнен гидравлическим, размещен на ведущем валу 1 и неподвижно закреплен на корпусе вариатора. Он включает в себя контролирующий и исполнительный органы и выполнен с возможностью изменения общего передаточного числа вариатора в независимости от оборотов приводного двигателя.
Исполнительный орган содержит кольцо 12, внутри которого размещены плунжерные пары - плунжеры 13 в направляющих 14. Направляющие 14 плунжеров ограничивают полость высокого давления 15, выполненную в корпусе плунжеров 16. С возможностью качения по внутренней поверхности кольца 12 установлены подшипники 17, которые попарно связаны с каждым плунжером 13 плунжерной пары посредством рычагов 18. В корпусе плунжеров 16 выполнено отверстие 19 для установки гидравлического механизма управления на ведущем валу 1 вариатора.
Контролирующий орган включает в себя следящую пружину 20 и подвижную муфту 21, размещенные на планке 22. Следящая пружина 20 размещена на одном плече планки 22, а на другом установлен следящий запорный клапан 23, закрывающий выход гидравлической жидкости из полости высокого давления 15. Подвод жидкости в полость высокого давления 15 осуществляются от плунжерного насоса высокого давления 26 по патрубку 28 через подводящий штуцер 24, в котором установлен нагнетательный клапан 25. Подкачивающий шестеренчатый насос низкого давления 27 установлен с возможностью забора гидравлической жидкости посредством трубки 29 из корпуса вариатора 30 и подает гидравлическую жидкость в полость над плунжером насоса высокого давления 26.
Вариатор планетарный работает следующим образом.
Для лучшей подачи материала и лучшего его восприятия введен термин «энергия», под которым понимается, что:
Энергия = крутящий момент на звене (Н×м) × количество оборотов звена (об./мин).
Энергия** от двигателя передается ведущим валом 1 на планетарную ведущую коронную шестерню 2.
С ведущей коронной шестерни 2 через сателлиты 4 первого планетарного ряда, которые сидят на подшипниках качения 11 на водиле 3 первого планетарного ряда, она передается непосредственно на водило 3 первого планетарного ряда и на центральную шестерню 5 первого планетарного ряда. Энергия** делится между водилом 3 и центральной шестерней 5 в какой-либо пропорции в зависимости от тормозного момента Mt, воздействующего на управляющее звено 6 вариатора.
Из-за жесткой связи управляющего звена 6, водила 3 первого планетарного ряда и центральной шестерни 7 второго планетарного ряда тормозной момент Mt будет воздействовать на эти звенья. Чем больше тормозной момент Mt на управляющем звене 6, тем больше тормозной момент Mt на водиле 3 первого планетарного ряда, тем большая часть энергии** будет перетекать на центральную шестерню 5 первого планетарного ряда. Одновременно с этим, при увеличении тормозного момента Mt на управляющем звене 6, увеличивается тормозной момент Mt на центральной шестерне 7 второго планетарного ряда, а увеличившееся количество энергии** на центральной шестерне 5 первого планетарного ряда будет мощнее воздействовать через водило 8 второго планетарного ряда на ведомую шестерню 10.
Так как тормозной момент Mt зависит от радиуса управляющего звена 6, на котором происходит торможение, и от силы торможения Ft на этом радиусе, то принимая, что радиус - конструктивный размер и, в принципе, не изменяется, можно сделать вывод, что определяющее значение в распределении потоков энергии** между звеньями вариатора имеет сила торможения Ft, воздействующая на управляющее звено 6.
Принимая во внимание вышесказанное и то, что энергия** будет идти по пути наименьшего сопротивления, т.е. по пути максимального передаточного числа между звеньями, рассмотрим принцип работы механической части вариатора.
А) При небольшой силе торможения Ft энергия** от двигателя передается посредством ведущего вала на ведущую коронную шестерню 2, далее ее:
а) большая часть перетекает на водило 3 первого планетарного ряда, потом на центральную шестерню 7 второго планетарного ряда и через сателлиты 9 второго планетарного ряда на ведомую шестерню 10.
б) меньшая часть перетекает на центральную шестерню 5 первого планетарного ряда, потом на водило 8 второго планетарного ряда и через сателлиты 9 второго планетарного ряда на ведомую шестерню 10.
На ведомой шестерне 10 получим сумму энергий**: большое передаточное число и, как следствие, увеличенный крутящий момент и пониженные обороты вращения по сравнению с входными аналогичными параметрами без потери какой-либо части входящей энергии** от двигателя.
Б) При плавно увеличивающейся силе торможения Ft энергия** от двигателя передается посредством ведущего вала 1 на ведущую коронную шестерню 2, далее ее:
а) плавно уменьшающаяся часть перетекает на водило 3 первого планетарного ряда, потом на центральную шестерню 7 второго планетарного ряда и через сателлиты 9 второго планетарного ряда на ведомую шестерню 10.
б) плавно увеличивающаяся часть перетекает на центральную шестерню 5 первого планетарного ряда, потом на водило 8 второго планетарного ряда и через сателлиты 9 второго планетарного ряда на ведомую шестерню 10. На ведомой шестерне 10 получим сумму энергий**: плавно уменьшающееся передаточное число и, как следствие, - плавно уменьшающийся крутящий момент и плавно повышающиеся обороты вращения по сравнению с входными аналогичными параметрами без потери какой-либо части входящей энергии** от двигателя.
1. Максимальное передаточное число вариатора планетарного.
Для определения максимального передаточного числа вариатора рассмотрим влияние тормозной силы Ft на управляющем звене 6, начиная с Ft=0 Н, на перераспределение потоков энергий** между звеньями первого и второго рядов. Ведомая шестерня 10 всегда находится под воздействием какого-либо нагрузочного момента My. Нагрузочный момент My, в свою очередь, имеет максимальное значение Му_ст на старте, потом его величина снижается до определенного значения. Поэтому вначале к ведомой шестерне 10 необходимо подвести крутящий момент от звеньев вариатора Мвар-10, равный по значению стартовому нагрузочному моменту Му_ст.
Для достижения этой цели необходимо увеличивать силу торможения Ft на управляющем звене 6 до тех значений, пока 0 H<Ft=Yст Н, где Yст Н - значение тормозной силы на управляющем звене 6, при котором ведомая шестерня 10, заблокированная стартовым нагрузочным моментом Му_ст, получит крутящий момент Мвар_10, подведенный посредством звеньев вариатора, так, что Мвар_10=Му_ст.
В связи с тем, что значение Му_ст может изменяться в зависимости от различных факторов, как в меньшую, так и в большую сторону, то для уверенной работы вариатора необходимо предусмотреть подвод крутящего момента от звеньев вариатора несколько больший по значению, чем Мвар_10. Этот максимальный крутящий момент от звеньев вариатора Мвар_max легко преодолеет стартовый нагрузочный момент Му_ст и придаст ведомой шестерне 10 дополнительный крутящий момент для преодоления различных нагрузок. Рассмотрим следующие варианты:
1.1.) Ft=0Н.
Сила торможения на управляющем звене 6 отсутствует.(Фиг.5.)
Энергия** двигателя Едв передается ведущим валом 1 на ведущую коронную шестерню 2. С ведущей коронной шестерни 2 через сателлиты 4 первого планетарного ряда, которые сидят на подшипниках качения 11 на водиле 3 первого планетарного ряда, она переходит на водило 3 первого планетарного ряда, далее на центральную шестерню 7 второго планетарного ряда.
Центральная шестерня 7 второго планетарного ряда передает через сателлит 9 второго планетарного ряда энергию** Едв на ведомую шестерню 10. Так как ведомая шестерня 10 остановлена стартовым нагрузочным моментом Му_ст, энергия** Едв перейдет на водило 8 второго планетарного ряда, принуждая его вращаться в том же направлении, что и центральная шестерня 7 второго планетарного ряда. С водила 8 второго планетарного ряда энергия ** Едв, по жесткой связи, идет на центральную шестерню 5 первого планетарного ряда и приходит через сателлит 4 первого планетарного ряда на водило 3 первого планетарного ряда в том же направлении, в котором водило 3 первого планетарного ряда вращается изначально от ведущей коронной шестерни 2. В связи с тем, что направления вращений совпадают, обороты водила 3 первого планетарного ряда - возрастают, а крутящий момент на нем понижается, так как его часть уходит на вращение центральной шестерни 5 первого планетарного ряда и водила 8 второго планетарного ряда. Поэтому энергия** Едв остается на водиле 3 первого планетарного ряда неизменной, т.е. перераспределение крутящих моментов происходит на звеньях вариатора автоматически в зависимости от тормозной силы Ft. Перераспределение происходит на сателлитах первого и второго рядов, а управляет процессом перераспределения тормозная сила Ft, действующая на управляющее звено 6. Учитывая жесткую связь водила 3 первого планетарного ряда и управляющего звена 6, имеем: энергия** Едв на управляющем звене 6 равна входящей энергии** двигателя Едв. Потеря какой-либо части энергии** Едв на каком-либо звене отсутствует.
***Рассмотрим схемы (Фиг.5, Фиг.6. Фиг.7) с некоторыми условиями: направление вращения по часовой стрелке "+", а против это "-".
1.2.) 0H<Ft<=YH.
Сила торможения на управляющем звене 6 плавно возрастает от 0 Н до Y Н. (Фиг.6.)
Под силой торможения Y Н принимается такое значение тормозной силы, при котором ведомая шестерня 10, заблокированная стартовым нагрузочным моментом Му_ст, получит максимальный крутящий момент Мвар_max, подведенный посредством звеньев вариатора, когда
Мвар_max>Му_ст.
При возникновении и плавном увеличении тормозной силы Ft, от автономного источника, действующей непосредственно на управляющее звено 6, будет происходить следующее. Энергия** Едв на управляющем звене 6 встретит сопротивление от увеличивающейся тормозной силы Ft.
Принимая во внимание то, что управляющее звено 6 жестко соединено с водилом 3 первого планетарного ряда и центральной шестерней 7 второго планетарного ряда, приходим к заключению, что тормозная сила Ft непосредственно воздействует также на водило 3 первого планетарного ряда и центральную шестерню 7 второго планетарного ряда путем создания на них силы торможения.
Исходя из описания работы вариатора в пункте 1.1. видно, что энергия** Едв двигателя присутствует на всех звеньях вариатора.
Если энергия ** Едв присутствует постоянно на управляющем звене 6, при непосредственном воздействии на него тормозной силы Ft, в интервале от 0 Н до Y Н, то очевидно, что при торможении управляющего звена 6 на нем будет расти крутящий момент при одновременном уменьшении его количества оборотов, который будет передаваться на другие звенья вариатора.
Принимая, что энергия** двигателя Едв равна Мкр_дв (const)×Nоб_дв (const), то и обороты ведущей коронной шестерни 2 и крутящий момент равны const. Тогда при уменьшении оборотов управляющего звена 6, обусловленного увеличением тормозной силы Ft, обороты от ведущей коронной шестерни 2, через сателлит 4 первого планетарного ряда, начнут передаваться на центральную шестерню 5 первого планетарного ряда, а от нее по жесткой связи к водилу 8 второго планетарного ряда, направление этих оборотов противоположно направлению вращения ведущей коронной шестерни 2.
Согласно описанию в 1.1. при тормозной силе Ft=0 Н вращение центральной шестерни 5 первого планетарного ряда и водила 8 второго планетарного ряда направлено в ту же сторону, что и вращение ведущей коронной шестерни 2, тогда при увеличении тормозной силы Ft обороты центральной шестерни 5 первого планетарного ряда и водила 8 второго планетарного ряда начнут плавно снижаться вплоть до полной остановки при Ft=YH.
Рассмотрим процесс передачи крутящего момента по звеньям вариатора.
Крутящий момент от двигателя Мкр_дв передается ведущим валом 1 на ведущую коронную шестерню 2. С ведущей коронной шестерни 2, через сателлиты 4 первого планетарного ряда, которые сидят на подшипниках качения 11 на водиле 3 первого планетарного ряда, он перераспределяется с учетом силы торможения Ft на:
а) M1 - водило 3 первого планетарного ряда далее на центральную шестерню 7 второго планетарного ряда,
б) М2 - центральную шестерню 5 первого планетарного ряда далее на водило 8 второго планетарного ряда.
Центральная шестерня 7 второго планетарного ряда передает через сателлит 9 второго планетарного ряда крутящий момент M1 на ведомую шестерню 10. Мысленно остановив водило 8 второго планетарного ряда, получим, что крутящий момент M1 переходит через сателлит 9 второго планетарного ряда на ведомую шестерню 10. Крутящий момент M1-10 на ведомой шестерне 10 направлен в противоположную сторону вращения центральной шестерни 7 второго планетарного ряда.
Водило 8 второго планетарного ряда передает через сателлит 9 второго планетарного ряда крутящий момент М2 на ведомую шестерню 10. Мысленно остановив центральную шестерню 7 второго планетарного ряда, получим, что крутящий момент М2 переходит через сателлит 9 второго планетарного ряда на ведомую шестерню 10. Крутящий момент М2-10 на ведомой шестерне 10 направлен в ту же сторону, в которую происходит вращение водила 8 второго планетарного ряда.
Понятно, что крутящий момент, получаемый на ведомой шестерне 10, равен сумме крутящих моментов M1-10+М2-10. Для определения результирующего крутящего момента на ведомой шестерне 10 необходимо учитывать направление действия крутящих моментов М1-10 и М2-10.
Водило 3 первого планетарного ряда и центральная шестерня 7 второго планетарного ряда вращаются постоянно в одну сторону, их направление вращения всегда совпадает с направлением вращения ведущей коронной шестерни 2 и не зависит от тормозной силы Ft. Примем направление вращения центральной шестерни 7 второго планетарного ряда за "+", тогда крутящий момент М1-10 со знаком "-".
Исходя из описания направления вращения водила 8 второго планетарного ряда и центральной шестерни 8 первого планетарного ряда в варианте 1.1., при Ft=0, принимаем, что направление вращения центральной шестерни и 5 первого планетарного ряда и водила 8 второго планетарного ряда плавно меняется с "+" на "0" при плавном увеличении тормозной силы 0<Ft=Y Н, тогда крутящий момент М2-10 имеет знак от "+" до 0.
Исходя из вышесказанного можно сделать вывод:
При плавном увеличении тормозной силы 0<Ft=Y Н результирующий крутящий момент на ведомой шестерне 10 возрастает
от М2-10 - М1-10=0, при Ft=0,
через М2-10 - М1-10, при 0<Ft<Y Н,
до 0 - М1-10=-М1-10, при Ft=YH.
знак "-" показывает, что ведомая шестерня 10 будет вращаться в направлении, противоположном направлению вращения ведущего вала 1 двигателя.
Из изложенного видно, что при значении Ft от 0 Н до Y Н крутящие моменты М2-1.0 и М1-10, приходящие на ведомую шестерню 10 от водила 8 второго планетарного ряда и от центральной шестерни 7 второго планетарного ряда соответственно, находятся в противодействии, т.е. гасят друг друга. С увеличением Ft от 0 Н до Y Н противодействие снижается, результирующий крутящий момент на ведомой шестерне 10 возрастает и достигает своего максимального значения при исчезновении противодействующих моментов при значении Ft равном Y Н, когда водило второго ряда остановлено. Понятно, что при направлении вращения водила 8 второго планетарного ряда со значением "0" (остановлено), при Ft=Y Н, крутящий момент двигателя Мкр_дв полностью передается на ведомую шестерню 10, только при участии водила 3 первого планетарного ряда, в первом планетарном ряду, и центральной шестерни 7 второго планетарного ряда, во втором планетарном ряду. В момент остановки центральной шестерни 5 первого планетарного ряда и водила 8 второго планетарного ряда будет задействовано максимальное передаточное число вариатора. В итоге крутящий момент двигателя, переданный на ведомую шестерню 10, увеличится в соответствии с максимальным передаточным числом вариатора и составит Мвар_max, а количество оборотов ведомой шестерни 10 снизится в соответствии с максимальным передаточным числом вариатора и составит nвар_min.
Ведомая шестерня 10, заблокированная стартовым нагрузочным моментом Му_ст, сможет начать вращаться только при условии, что подведенный к ней крутящий момент от двигателя, посредством звеньев вариатора, Мвар, превысит величину стартового нагрузочного момента Му_ст, т.е.
Мвар>Му_ст и Мвар>Мвар_10, где Мвар_10=Му_ст.
При этом, если на ведомой шестерне 10 встретятся два момента Мвар_10, от звеньев вариатора, и стартовый нагрузочный момент Му_ст, ведомая шестерня 10 будет оставаться неподвижной, т.е. ее обороты будут равны 0. Плавно увеличивая крутящий момент на ведомой шестерне 10, от звеньев вариатора, от значения Мвар_10 до Мвар и далее до значения Мвар_max, - обороты ведомой шестерни 10 будут плавно возрастать от 0 до значения nвар_min.
Значение крутящего момента на ведомой шестерне 10 Мвар_10 обусловлено наличием тормозной силы Ft равной Yст Н, а значение максимального крутящего момента на ведомой шестерне 10 Мвар_max обусловлено наличием тормозной силы Ft, равной по значению Y Н. В связи с тем, что
Мвар_max>Мвар_10, то и Y Н>Yст Н.
Значит, ведомая шестерня 10 начнет вращаться до того, как остановится центральная шестерня 5 первого планетарного ряда и водило 8 второго планетарного ряда, при плавном увеличении тормозной силы Ft от 0 Н до Y Н. Максимальное передаточное число вариатора можно подсчитать по формуле:

где z - количество зубьев шестерни соответствующего звена, отсюда


Исходя из формулы (1.2) понятно, что Му_ст должен быть меньше Мвар_max, иначе двигатель не сможет вращать ведущий вал 1, а учитывая, что стартовый нагрузочный момент на ведомой шестерне 10 Му_ст может увеличиваться из-за различных факторов, то необходимо принимать коэффициенты запаса по максимальному передаточному числу.
В связи с тем что стартовый нагрузочный момент Му_ст, находящийся на ведомой шестерне 10, передается на водило 3 первого планетарного ряда, по тому же пути, что и крутящий момент от водила 3 первого планетарного ряда на ведомую шестерню 10, но в обратную сторону, то тормозной момент на управляющем звене 6 равен:
Mt=Му_ст/(Imax-b), а так как Mt=Ft×R,
где R - радиус приложения тормозной силы на управляющем звене 6, b - запас по передаточному числу, то минимальная тормозная сила для начала вращения:

Исходя из вышесказанного в п.1.2. имеем:
При увеличении тормозной силы Ft на управляющем звене 6 от значения 0 Н до Y Н крутящий момент на ведомой шестерне 10 увеличится от значения 0 (Н×м) до Мвар_max (Н×м), обороты ведомой шестерни 10 увеличатся от значения 0 (об/мин) до nвар_min (об/мин).
2. Минимальное передаточное число вариатора планетарного.

Сила торможения на управляющем звене 6 плавно возрастает от Y Н до Ymax Н.
Под силой торможения Ymax H принимается такое значение тормозной силы, при котором управляющее звено 6 блокируется тормозной силой Ft, т.е. обороты управляющего звена 6 равны 0.
При дальнейшем увеличении тормозной силы Ft от значения Y Н до значения Ymax Н увеличивающаяся тормозная сила Ft будет с большей силой тормозить управляющее звено 6. Через управляющее звено 6 увеличивающаяся тормозная сила будет сильнее воздействовать на водило 3 первого планетарного ряда и центральную шестерню 7 второго планетарного ряда. Вследствие этого обороты водила 3 первого планетарного ряда и центральной шестерни 7 второго планетарного ряда начнут уменьшаться. Также начнет уменьшаться и крутящий момент, передаваемый от центральной шестерни 7 второго планетарного ряда на ведомую шестерню 10. Так как крутящий момент и обороты ведущей коронной шестерни 2 мы приняли в предыдущем пункте постоянными, то они начнут частично перетекать через сателлит 4 первого планетарного ряда на центральную шестерню 5 первого планетарного ряда и на водило 8 второго планетарного ряда. Водило 8 второго планетарного ряда, получая больше оборотов, будет их передавать на ведомую шестерню 10. Количество оборотов, передаваемое на ведомую шестерню 10 от водила 8 второго планетарного ряда, достигнет максимума тогда, когда все обороты ведущей коронной шестерни 2 будут передаваться только на центральную шестерню 5 первого планетарного ряда и водило 8 второго планетарного ряда. Это произойдет тогда, когда тормозная сила Ft увеличится до значения Ymax Н, при воздействии которой на управляющее звено 6 произойдет его остановка. При этом остановится водило 3 первого планетарного ряда и центральная шестерня 7 второго планетарного ряда, а весь крутящий момент с ведущей коронной шестерни 2 перейдет на центральную шестерню 5 первого планетарного ряда и на водило 8 второго планетарного ряда.
Рассмотрим процесс передачи крутящего момента по звеньям вариатора.
Крутящий момент от двигателя Мкр_дв передается ведущим валом 1 на ведущую коронную шестерню 2. С ведущей коронной шестерни 2, через сателлиты 4 первого планетарного ряда, которые сидят на подшипниках качения на водиле 3 первого планетарного ряда, он перераспределяется, с учетом силы торможения Ft, на:
а) M1 - водило 3 первого планетарного ряда далее на центральную шестерню 7 второго планетарного ряда,
б) М2 - центральную шестерню 5 первого планетарного ряда далее на водило 8 второго планетарного ряда.
Центральная шестерня 7 второго планетарного ряда передает через сателлит 9 второго планетарного ряда крутящий момент M1 на ведомую шестерню 10. Мысленно остановив водило 8 второго планетарного ряда, получим, что крутящий момент M1 переходит через сателлит 9 второго планетарного ряда на ведомую шестерню 10. Крутящий момент M1-10 на ведомой шестерне 10 направлен в противоположную сторону вращения центральной шестерни 7 второго планетарного ряда.
Водило 8 второго планетарного ряда передает через сателлит 9 второго планетарного ряда крутящий момент М2 на ведомую шестерню 10. Мысленно остановив центральную шестерню 7 второго планетарного ряда получим, что крутящий момент М2 переходит через сателлит 9 второго планетарного ряда на ведомую шестерню 10.
Крутящий момент М2-10 на ведомой шестерне 10 направлен в ту же сторону, в которую происходит вращение водила 8 второго планетарного ряда. Понятно, что крутящий момент, получаемый на ведомой шестерне 10, равен сумме крутящих моментов M1-10+М2-10. Для определения результирующего крутящего момента на ведомой шестерне 10 необходимо учитывать направление действия крутящих моментов M1-10 и М2-10.
Водило 3 первого планетарного ряда и центральная шестерня 7 второго планетарного ряда вращаются постоянно в одну сторону, их направление вращения всегда совпадает с направлением вращения ведущей коронной шестерни 2 и не зависит от тормозной силы Ft. Примем направление вращения центральной шестерни 7 второго планетарного ряда за "+", тогда крутящий момент M1-10 - со знаком "-", и значением от "-" до "0".
Исходя из описания направления вращения водила 8 второго планетарного ряда и центральной шестерни 5 первого планетарного ряда в варианте 1.2., при Ft=Y Н, принимаем, что направление вращения центральной шестерни 5 первого планетарного ряда и водила 8 второго планетарного ряда плавно меняется с "0" на "-", при плавном увеличении тормозной силы Y Н<Ft=Ymax Н, тогда крутящий момент М2-10 имеет знак от "0" до "-".
Исходя из вышесказанного можно сделать вывод:
При плавном увеличении тормозной силы Y Н<Ft=Ymax Н, результирующий крутящий момент на ведомой шестерне 10 возрастает
от M1-10+М2-10=-M1_10-0=-M1_10, пpи Ft=YH,
через M1-1+М2-10=-M1_10-М2-10=-(M1-10+М2-10), при Y H<Ft<Ymax H,
до M1_10+М2-10=0-М2-10=-М2-10, при Ft=Ymax H,
знак "-" показывает, что ведомая шестерня 10 будет вращаться в направлении, противоположном направлению вращения ведущего вала 1 двигателя.
Из изложенного видно, что при значении Ft от Y Н до Ymax H крутящие моменты M1-10 и М2-10, приходящие на ведомую шестерню 10 от водила 8 второго планетарного ряда и от центральной шестерни 7 второго планетарного ряда соответственно действуют в одном направлении, т.е. усиливают друг друга. С увеличением Ft от Y Н до Ymax Н уменьшается доля от бездействия крутящего момента M1-10, получаемого от центральной шестерни 7 второго планетарного ряда на ведомую шестерню 10, а возрастает доля от воздействия крутящего момента М2-10, получаемого от водила 8 второго планетарного ряда на ведомую шестерню 10. При значении тормозной силы Ft, равной Ymax H, a следовательно, при остановленном управляющем звене 6 крутящий момент от ведущей коронной шестерни 2 полностью передается на ведомую шестерню 10 через водило 8 второго планетарного ряда.
В момент остановки центральной шестерни 7 второго планетарного ряда и водила 3 первого планетарного ряда будет задействовано минимальное передаточное число вариатора. В итоге крутящий момент двигателя, переданный на ведомую шестерню 10, уменьшится в соответствии с минимальным передаточным числом вариатора и составит Мвар_min, а количество оборотов ведомой шестерни 10 увеличится в соответствии с минимальным передаточным числом вариатора и составит nвар_max.
Минимальное передаточное число вариатора можно подсчитать по формуле:

отсюда


Нагрузочный момент My, при максимальных оборотах ведомой шестерни 10, должен быть меньше Мвар_min, для полного использования потенциала вариатора и нормальной работы двигателя.
Мдв×Iвар_min=Мвар_min>Mу.
В связи с тем что нагрузочный момент Mу, находящийся на ведомой шестерне 10, передается на ведущую коронную шестерню 2 по тому же пути, что и крутящий момент от ведущей коронной шестерни 2 на ведомую шестерню 10, но в обратную сторону, то крутящий момент на ведущей коронной шестерне 2, необходимый для преодоления нагрузочного момента на ведомой шестерне 10, равен:

Для передачи крутящего момента Мвед1 через звенья вариатора на ведомую шестерню 10, управляющее звено 6 необходимо затормозить моментом Mt, равным:

Подставляя значение из формулы (2.4) в формулу (2.5), получаем:

а так как Mt=Ft×R,
где R - радиус приложения тормозной силы на управляющем звене 6, то тормозная сила Ft равна:

Эта формула справедлива для всех режимов работы вариатора, при значениях тормозной силы Y Н<Ft<Ymax H,
где Ft - тормозная сила, значение от Y Н до Ymax Н,
My - нагрузочный момент на ведомой шестерне 10, при определенном значении Ft,
Iвар - передаточное число вариатора, при определенном значении Ft.
Исходя из формулы (2.5) можно сделать вывод, что при внезапном увеличении нагрузочного момента My на ведомой шестерне 10, при постоянном значении силы торможения Ft, находящейся в пределах от Y Н до Ymax Н, передаточное число вариатора пропорционально увеличивается. Увеличение передаточного числа происходит из-за того, что для преодоления возросшего нагрузочного момента с ведущей коронной шестерни 2 необходимо передать больший крутящий момент для преодоления внезапно возросшего нагрузочного момента. При этом пропорционально возрастает крутящий момент на управляющем звене 6, но так как оно заторможено постоянной неувеличившейся силой Ft, которой становится недостаточно, управляющее звено 6, увлекаемое увеличившимся крутящим моментом, начинает проскальзывать и получать дополнительные обороты и дополнительный крутящий момент. При этом растут обороты и крутящий момент на центральной шестерне 7 второго планетарного ряда, а обороты и крутящий момент водила 8 второго планетарного ряда понижаются. В связи с этим автоматически растет крутящий момент на ведомой шестерне 10 и понижаются ее обороты.
При внезапном уменьшении нагрузочного момента My на ведомой шестерне 10, при постоянном значении силы торможения Ft, находящейся в пределах от Y Н до Ymax Н, передаточное число вариатора пропорционально уменьшается. При этом автоматически понижается крутящий момент на ведомой шестерне 10 и повышаются ее обороты.
Вариатор адаптируется к внешним нагрузкам на выходном звене автоматически, при постоянном значении входных параметров ведущего звена (Мдв и nдв равны const) без применения дополнительных устройств.
Исходя из вышесказанного в п.2 имеем:
При увеличении тормозной силы Ft на управляющем звене 6 от значения Y Н до Ymax Н, крутящий момент на ведомой шестерне 10 уменьшается от значения Мвар_max (Н×м) до значения Мвар_min (Н×м), обороты ведомой шестерни 10 увеличатся от значения nвар_min (об/мин) до значения nвар_max (об/мин).
На основании изложенного выше в п.п.1 и 2 можно построить график (Фиг.8) зависимости передаточного числа вариатора, крутящего момента на ведомой шестерне 10 и числа оборотов ведомой шестерни 10 от силы торможения Ft, действующей на управляющее звено 6 вариатора при постоянном крутящем моменте приводного двигателя Мкр_дв (const) и постоянных оборотах вала двигателя Моб_дв (const).
Для уточнения рабочих характеристик вариатора подсчитаем глубину диапазона изменения передаточного числа вариатора. Глубина диапазона зависит от максимального и минимального передаточных чисел вариатора. На основании формул (1.1.) и (2.1.) имеем:
Iвар_max=(1+z5/z2)×(z10/z7)
Iвар_min=(z5/z2)×1/(1+z7/z10)
Глубина диапазона изменения передаточного числа W равна:
W=Iвар_max/Iвар_min,
если конструктивно принять количество зубьев шестерен, где
z2=z10=105, z5=z7=33, то получим следующее:
W=(z2+z5)×(z2+z5)/(z5×z5)=19044/1089=17,8476.
Для сравнения глубина диапазона современной КПП равна от 4 до 5, а при применении дополнительного повышающего или понижающего устройства совместно с КПП от 8 до 10.
3. Исходя из требований по торможению управляющего звена 6 вариатора применена гидравлическая схема торможения управляющего звена 6 вариатора.
Кольцо 12 имеет внутренний диаметр, выполненный с эксцентриситетом "е", по отношению к наружному диаметру. По наружному диаметру оно жестко крепится к управляющему звену 6.
Плунжеры 13 плунжерных пар совершают возвратно-поступательное движение в направляющих 14 плунжеров.
Направляющие 14 плунжеров жестко установлены в корпусе плунжеров 16.
Корпус плунжеров 16 трубчатого сечения с толстыми стенками неподвижно установлен в корпусе вариатора. Внутренняя полость высокого давления 15 заполнена гидравлической жидкостью под давлением Р, которое может изменять свое значение.
Через корпус плунжеров 16 проходит по сквозному отверстию 19 ведущий вал 1.
На концах рычага 18 плунжера закреплены подшипники 17. Когда кольцо 12 воздействует на подшипники 17, они через рычаг 18 плунжера воздействуют непосредственно на плунжер 13 плунжерной пары.
Тормозную силу Ft на управляющем звене 6, через жестко установленное в нем кольцо 12 с эксцентриситетом "е", создают плунжеры 13 плунжерных пар, которые постоянно поджаты к рычагам 18 при помощи давления Р (МПа) гидравлической жидкости в полости высокого давления 15 (Фиг.4.)
Кольцо 12, вращаясь вокруг оси управляющего звена 6, нажимает на подшипник 17, который через рычаг 18 воздействует непосредственно на плунжер 13 плунжерной пары, который совершает возвратно-поступательное движение. Величина перемещения плунжера 13 составляет L (метр):
L=2×е.
Гидравлическая жидкость в полости высокого давления 15, находясь под давлением Р (МПа), воздействует на плунжер 13 плунжерной пары, который имеет площадь поперечного сечения S мм2. Усилие Ft (H) воздействует на рычаг 18 и передается на подшипники 17, которые закреплены на концах рычага 18.
Сила Ft, с которой подшипники 17 воздействуют на кольцо 12:

Кольцо 12, вращаясь вокруг оси управляющего звена 6, с крутящим моментом Мкр, нажимает на подшипники 17. Для дальнейшего вращения кольца 12 и одновременно управляющего звена 6 ему необходимо преодолеть момент сопротивления вращению (торможения), созданному на подшипниках 17 тормозной силой Ft. Так как Ft это сила от плунжера 13 плунжерной пары и в итоге она действует в точке контакта кольца 12 и подшипника 17 на расстоянии "с" от центра кольца 12, то тормозной момент вращения равен тормозной силе Ft, по прямолинейному перемещению плунжера 13, на плече, равном радиусу кольца 12:

Рассмотрим различные значения момента сопротивления вращению.
3.1.) Mt=0(Н×м).
Если Mt=0 Н×м, то кольцо 12 будет вращаться, нажимая на плунжеры и перемещая их, не испытывая никакого сопротивления вращению. Исходя из формулы (3.2) это возможно, когда Р=0 МПа, т.к. все остальные величины в указанной формуле являются конструктивно заданными размерами и их значения не изменяются.
Если Р=0 МПа, то согласно формулы (3.1)
Ft=0 (Н).
3.2.) 0<Мt<Мкр (Н×м.)
Если 0<Mt<Мкр Н×м, то кольцо 12 будет вращаться, нажимая на плунжеры и перемещая их, теряя при этом часть крутящего момента Мкр на придание плунжерам 13 возвратно-поступательного движения. При этом скорость вращения кольца 12 уменьшится и будет уменьшаться, если согласно формуле (3.2) увеличивать давление Р (МПа) в полости высокого давления 15.
При увеличении давления 0<Р (МПа)<Х (МПа) увеличится и сила Ft (Н).
0<Ft<Ymax (H).
3.3.) Mt=Мкр (Н×м).
Если Mt=Мкр Н×м, то кольцо 12 остановится и его вращение прекратится.
Исходя из формулы (3.2) этого возможно достичь, увеличивая давление Р в полости высокого давления 15 до такого значения, при котором плунжеры 13 перестанут совершать возвратно-поступательное движение от Мкр на кольце 12. При увеличении давления Р=Хmax (МПа) увеличится и сила Ft (Н).
Ft=Ymax (Н).
Анализируя описанные выше варианты изменения момента сопротивления вращению крутящему моменту Мкр на кольце 12, приходим к выводу, что торможение кольца 12 возможно увеличением давления гидравлической жидкости в полости высокого давления 15.
Исходя из условий работы вариатора необходимо внести дополнительные условия по изменению давления Р в полости высокого давления 15.
а) давление Р должно меняться плавно, без скачков в значениях;
б) объем полости высокого давления 15 корпуса плунжеров 16 должен оставаться постоянным при перемещениях плунжеров.
в) изменение давления Р должно осуществляться от управляющего элемента - подвижной муфты 21 по указанным параметрам.
Рассмотрим дополнительные условия для давления Р.
а) Так как во время вращения управляющего звена 6 центр кольца 12 движется по кругу, вокруг центра управляющего звена 6, то перемещение пары плунжеров 13 вызывает постоянное изменение объема полости высокого давления 15.
Если центр кольца 12 лежит на оси плунжеров 13, то объем полости высокого давления 15 максимальный.
Если центр кольца 12 лежит на прямой, проходящей через центр управляющего звена 6 и перпендикулярной оси плунжеров 13, то объем полости высокого давления 15 минимальный.
В связи с тем что изменение объема полости высокого давления 15 приведет к скачкообразному изменению давления, то для выполнения условий пункта а) и б) необходимо разместить в этой же или в параллельной плоскости еще одну пару плунжеров, ось которой будет находиться под углом 90 градусов к рассматриваемой. Полость высокого давления 15 для обеих плунжерных пар - общая. В итоге получим, одна пара плунжеров уменьшает объем полости высокого давления 15, а вторая пара плунжеров этот объем увеличивает, т.е. в итоге объем полости высокого давления 15 остается постоянным. На эти две пары плунжеров 13 воздействует одно кольцо 12.
В полученной схеме на кольцо 12 будут воздействовать всегда два соседних плунжера из перпендикулярных осей. Это приведет к тому, что на кольце 12, а равнозначно и на управляющем звене 6 появится неуравновешенная радиальная сила и возможен дисбаланс вращающихся масс от кольца 12. Масса по кругу кольца 12 распределена неравномерно.
Для уравновешивания радиальной силы и сведения дисбаланса к минимуму необходимо дополнительно установить, как минимум, в управляющее звено 6 еще одно кольцо 12 под углом 360/2 градусов, где 2 - количество колец 12, установленных в управляющем звене 6, т.е. 180 градусов относительно первого кольца 12, и нагрузить второе кольцо 12 двумя парами плунжерных пар, расположенных между собой под углом 90 градусов.
Полость высокого давления 15 для всех плунжерных пар общая. Дисбаланс вращающихся масс отсутствует. Радиальные силы от плунжеров на кольца 12 уравновешены.
В итоге получаем схему механизма, которая имеет, как минимум, четыре параллельных плоскости, в каждой по одной плунжерной паре. Момент торможения в связи с уточнением схемы механизма можно вычислить по формуле:

где n - количество плунжерных пар в механизме.
При увеличении количества колец 12 и соответственно плунжерных пар под ними при увеличении Р (МПа) и площади S (мм2) поперечного сечения плунжера, при увеличении размера "с" - радиуса управляющего звена 6 (метр), можно достичь значительных значений момента торможения Mt, что актуально для передачи значительных крутящих моментов.
Исходя из формулы (2.6):
Mt=(1+z5/z2)×Mу/Iвар
имеем, что тормозной момент Mt на управляющем звене 6 пропорционален нагрузочному моменту My на ведомой шестерне 10, деленному на передаточное число вариатора, а так как R=с, то, подставляя формулу (3.3) в формулу (2.6), получим:

Исходя из формулы (3.4) можно подсчитать любое значение любого из множителей, если методом проб исходя из заданных параметров подбирать конструктивные размеры.
**При применении формулы (3.4) к расчету данных для автомобильной тематики необходимо учитывать передаточные числа всей трансмиссии.
в) Для выполнения дополнительных условий по изменению давления Р управляющим звеном 6 рассмотрим схему регулирования.
Планка 22 одним концом лежит на следящей пружине 20. На втором конце планки 22 закреплен запорный клапан 23. По планке 22 сверху свободно перемещается подвижная муфта 21 в плоскости, перпендикулярной оси корпуса плунжеров 16.
Подвижная муфта 21 неразъемная, в продольном сечении имеет форму кольца с осями для перемещения по направляющим. Следящая пружина 20 имеет заданное усилие сжатия.
Через штуцер 24 и через нагнетательный клапан 25 в полость высокого давления 15 подается гидравлическая жидкость под расчетным максимальным давлением Рmax, где Рmax - давление, при котором получаем такую тормозную силу Ft=Ymax (H), при которой Mt=Мкр (H×м).
Управляющим элементом, регулирующим давление Р гидравлической жидкости в полости высокого давления 15, является подвижная муфта 21.
Подвижная муфта 21 перемещается от упора возле следящей пружины 20 до упора возле запорного клапана 23 на расстояние «d». Значения расстояний «а» и «b» изменяются в зависимости от положения подвижной муфты 21.
Давление Р (МПа) в полости высокого давления 15 воздействует на запорный клапан 23 с площадью поперечного сечения Q (мм2) и поднимает его с усилием Т=Р×Q(H).
Запорный клапан 23, поднимаясь, воздействует на планку 22 и через плечо в (метр) создает на ней момент М23=Т×b=Р×Q×b (H×м), воздействующий на следящую пружину 20.
Следящая пружина 20 в этом случае создает противоположный момент М20=N×а (H×м),
где N - усилие сжатия следящей пружины (H),
«а» - плечо действия силы N (метр).
Планка 22 всегда находится под воздействием двух противоположно направленных моментов М23 и М20:
P×Q×b<>N×a.
Если давление Р в полости высокого давления 15 недостаточное, то запорный клапан 23 закрыт за счет момента М20 от следящей пружины 20. Если давление Р в полости высокого давления 15 возрастает, запорный клапан 23 открывается и давление Р уменьшается. При уменьшении давления Р клапан 23 закрывается. Таким образом клапан 23 поддерживает заданное давление Р в полости высокого давления 15.
Исходя из того, что в полость высокого давления 15 постоянно подается гидравлическая жидкость под давлением Рmax, то регулирование давления в полости высокого давления 15 происходит по тому же принципу, который описан выше. Улучшение проявляется в минимизации времени, необходимого для поднятия давления в полости высокого давления 15. Т.е. уменьшается период времени, когда запорный клапан 23 закрыт, для увеличения давления Р в полости высокого давления 15. Этим достигается быстродействие всего гидравлического управляющего механизма.
При таком принципе работы механизма излишки гидравлической жидкости будут постоянно выходить из-под следящего запорного клапана 23, поэтому необходимо согласовать объемную подачу гидравлической жидкости насосом и сечение запорного клапана 23 по сбросу излишков гидравлической жидкости, чтобы уменьшить влияние на значение Р повышающимся давлением на выходе из-под следящего запорного клапана 23 при необходимости понижения давления Р.
На Фиг.3 изображена схема регулятора давления со встроенным плунжерным насосом высокого давления 26. Подкачивающий шестеренчатый насос - насос низкого давления 27 берет гидравлическую жидкость из корпуса вариатора 30 по заборной трубке 29 и она под невысоким давлением поступает в полость над плунжером насоса высокого давления 26. Плунжер насоса высокого давления 26, приводимый в движение от ведущего вала 1 вариатора, подает масло под избыточным давлением в полость высокого давления 15 через нагнетательный клапан 25 в штуцере 24. Давление в полости высокого давления 15 регулируется по тому же принципу, который описан выше. На основании изложенного в пункте в) видно, что давление Р в полости высокого давления 15 регулируется подвижной муфтой 21, посредством ее перемещения по планке 22. При этом изменяются значения размеров «а» и «b», которые непосредственно задают необходимое давление Р.
Кинематическая схема гидравлического тормоза может работать отдельно в каком-либо другом механизме, так как она может создавать заданный регулируемый тормозной момент. Она лишена фрикционного трения и всех его последствий: износа дорогостоящих тормозных накладок, повышенной температуры и т.д.
Использование предлагаемого технического решения позволило создать планетарный вариатор с высоким коэффициентом полезного действия (КПД), большим диапазоном регулирования общего передаточного числа и с возможностью самоадаптации к воздействию различных внешних нагрузок.
Вариатор позволяет осуществлять полную передачу энергии от ведущего вала двигателя на ведомую шестерню вариатора планетарного. Отсюда постоянный и высокий КПД вариатора на любых рабочих режимах, равный по значению КПД зубчатой передачи и имеющий значение в пределах 0,97-0,98.
Передаточное число задается принудительно от автономного регулятора, а изменение крутящего момента на ведомом звене происходит в зависимости от внешних нагрузок.
При увеличении нагрузки на ведомой шестерне передаточное число самостоятельно возрастает относительно заданного, повышая крутящий момент и снижая обороты ведомой шестерни. За счет чего и происходит самоадаптация к внешним нагрузкам вариатора.
Вариатор имеет возможность изменения крутящего момента и количества оборотов ведомого звена вариатора планетарного при постоянных значениях крутящего момента и количества оборотов ведущего вала приводного двигателя.
При постоянных значениях крутящего момента и количества оборотов ведущего вала имеем: - плавное повышение крутящего момента на ведомой шестерне вариатора до момента начала вращения ведомой шестерни. С момента начала вращения - плавное бесступенчатое сначала возрастающее, потом уменьшающееся значение крутящего момента и при этом постоянно плавно возрастающее количество оборотов ведомой шестерни, вариатор имеет большой диапазон значений передаточного числа с возможностью плавного изменения его значения.
Если в качестве приводного двигателя используется ДВС, то эти перечисленные факторы, в свою очередь, могут упростить требования к конструкции самого двигателя внутреннего сгорания, его выходным характеристикам и к его режимам работы, что, в свою очередь, в итоге приведет к понижению расхода горючего и положительно скажется на экологии.
В нем отсутствует необходимость применения механизмов сцепления или демпфирования, гидромуфт или гидротрансформаторов для улучшения плавности передачи крутящего момента. В связи с отсутствием, как таковой, жесткой связи между ведущим валом и ведомой шестерней все эти функции выполняет тормозная сила Ft.
Небольшое количество деталей и технологическая простота их изготовления, сравнительно небольшие габаритные размеры вариатора - еще одно преимущество вариатора.
Возможность торможения ведомой шестерни вариатора планетарного крутящим моментом ведущего вала от приводного двигателя.
Отсутствие ограничения по значению передаваемого крутящего момента от ведущего вала. Ограничение только по габаритам и присоединительным размерам.
Передача крутящего момента между звеньями вариатора осуществляется, как минимум, в трех точках сразу в зависимости от количества сателлитов, а вследствие этого меньшая нагруженность звеньев.
При торможении управляющего звена отсутствует трение, значит, отсутствуют детали с повышенным износом и отсутствует тепловая энергия, нагревающая детали как гидравлического тормоза, так и детали вариатора.
Возможна работа механизма с регулируемым проскальзыванием деталей при помощи регулируемого тормозного усилия.
Минимальные сторонние затраты энергии для регулирования тормозной силы Ft, сводящиеся к прямолинейному перемещению подвижной муфты.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОМОМЕНТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2007 |
|
RU2347966C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВАРИАТОР | 2010 |
|
RU2457379C1 |
| ДИАПАЗОННАЯ ПЛАНЕТАРНАЯ КОРОБКА ПЕРЕДАЧ | 2013 |
|
RU2563918C2 |
| ПЛАНЕТАРНАЯ КОРОБКА ПЕРЕДАЧ | 2014 |
|
RU2581954C1 |
| ПЛАНЕТАРНЫЙ ФРИКЦИОННЫЙ ВАРИАТОР | 2005 |
|
RU2300677C1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| ДВУХСТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ РАЗДАТОЧНАЯ КОРОБКА | 2003 |
|
RU2248891C1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ФМВ | 1993 |
|
RU2061600C1 |
| КОРОБКА ПЕРЕДАЧ | 1992 |
|
RU2068516C1 |
| Бесступенчатая коробка передач | 2023 |
|
RU2806843C1 |
Изобретение относится к механизмам зубчатых бесступенчатых передач и может быть использовано в машиностроении, в частности для бесступенчатой трансмиссии транспортных средств. Вариатор содержит два планетарных ряда, механизм управления и управляющее звено (6). Ведущий вал (1) выполнен сквозным с возможностью установки приводного двигателя на любой его конец. Первый и второй планетарные ряды размещены последовательно, каждый из которых включает центральное и коронное колесо, водило с сателлитами. Механизм управления выполнен гидравлическим, имеет возможность изменения общего передаточного числа вариатора в независимости от оборотов приводного двигателя, размещен на ведущем валу (1), неподвижно закреплен на корпусе (30) и содержит контролирующий и исполнительный органы. Изобретение позволяет регулировать передаточные числа на установившихся режимах приводного двигателя и имеет высокий КПД, большой диапазон регулирования общего передаточного числа, возможность самоадаптации к воздействию различных внешних нагрузок. 2 з.п. ф-лы, 8 ил.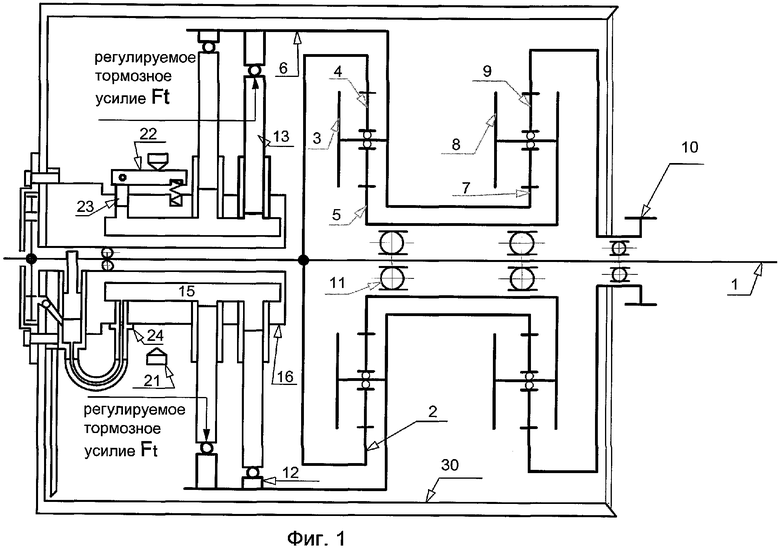
1. Вариатор планетарный, содержащий корпус, размещенные в нем ведущий вал и ведомую шестерню, механизм управления и два планетарных ряда, отличающийся тем, что он снабжен управляющим звеном, первый и второй планетарные ряды размещены последовательно, каждый из которых включает центральную и коронную шестерни и водило с сателлитами, ведущий вал жестко связан с коронной шестерней первого планетарного ряда и выполнен сквозным с возможностью установки приводного двигателя на любой его конец, а механизм управления размещен на ведущем валу, неподвижно закреплен на корпусе, содержит контролирующий и исполнительный органы, выполнен гидравлическим и имеет возможность изменения общего передаточного числа вариатора в независимости от оборотов приводного двигателя.
2. Вариатор по п.1, отличающийся тем, что контролирующий орган механизма управления содержит насос низкого и насос высокого давления для гидравлической жидкости со следящим запорным клапаном и подвижной муфтой, причем привод насосов низкого и высокого давления выполнен посредством ведущего вала, а исполнительный орган механизма управления содержит расчетное количество плунжерных пар, которые установлены с возможностью воздействия на управляющее звено.
3. Вариатор по п.1, отличающийся тем, что первый и второй планетарные ряды соединены между собой посредством жесткого соединения управляющего звена с водилом первого планетарного ряда и центральной шестерней второго планетарного ряда, а центральная шестерня первого планетарного ряда и водило второго планетарного ряда жестко соединены между собой.
| ВАРИАТОР ПЛАНЕТАРНЫЙ БЕССТУПЕНЧАТЫЙ | 1995 |
|
RU2095665C1 |
| RU 2006100411 А, 20.07.2007 | |||
| DE 3916244 А1, 23.11.1989 | |||
| КИРДЯШЕВ Ю.Н | |||
| Многопоточные передачи дифференциального типа | |||
| - Л.: Машиностроение, 1981, с.92, табл.4.3, схема 6. | |||

