Изобретение относится к машиностроению, а более конкретно к способам регулирования скорости вращения валов исполнительных механизмов и может найти применение, например, в конструкции автомобиля вместо стандартной ступенчатой коробки скоростей.
Известна бесступенчатая планетарная передача, содержащая соосные ведомый валы, по крайней мере два планетарных ряда, каждый из которых включает малое и большое центральные колеса и водило с сателлитами, механизм управления, выполненный в виде гидротрансформатора, и тормоза.
Однако при установке такой передачи на транспортном средстве она не может выполнять одновременно функции генератора, стартера, регулятора, маховика и т.п.
Задачей изобретения является создание комплексной и простой конструкции вариатора планетарного бесступенчатого типа с электрическим управлением, который, будучи установлен на транспортном средстве, например автомобиле, мог бы выполнять одновременно функции генератора, стартера, регулятора, маховика, а также муфты сцепления.
Указанная задача решается тем, что в вариаторе планетарном, бесступенчатом, содержащем соосные ведущий и ведомый валы, два планетарных ряда, каждый из которых включает малое и большое центральные колеса и водило с сателлитами тормоза и механизм управления, который выполнен с возможностью вращения на ведущем валу и выполнен в виде цилиндра со встроенными по периферии постоянными магнитами, расположенными между неподвижными обмотками статора, включенными в электрически регулируемую цепь, при этом большое и малое центральные колеса первого планетарного ряда жестко установлены соответственно на ведомом и ведущем валах, из которых большое центральное колесо связано с тормозом, большое и малое центральные колеса второго планетарного ряда установлены с возможностью вращения на ведущем валу, из которых большое центральное колесо жестко связано с водилом первого планетарного ряда и со вторым тормозом, малое центральное колесо посредством фрикционного элемента жестко связано с ротором-маховиком, а водило с сателлитами этого же планетарного ряда жестко закреплено на ведущем валу.
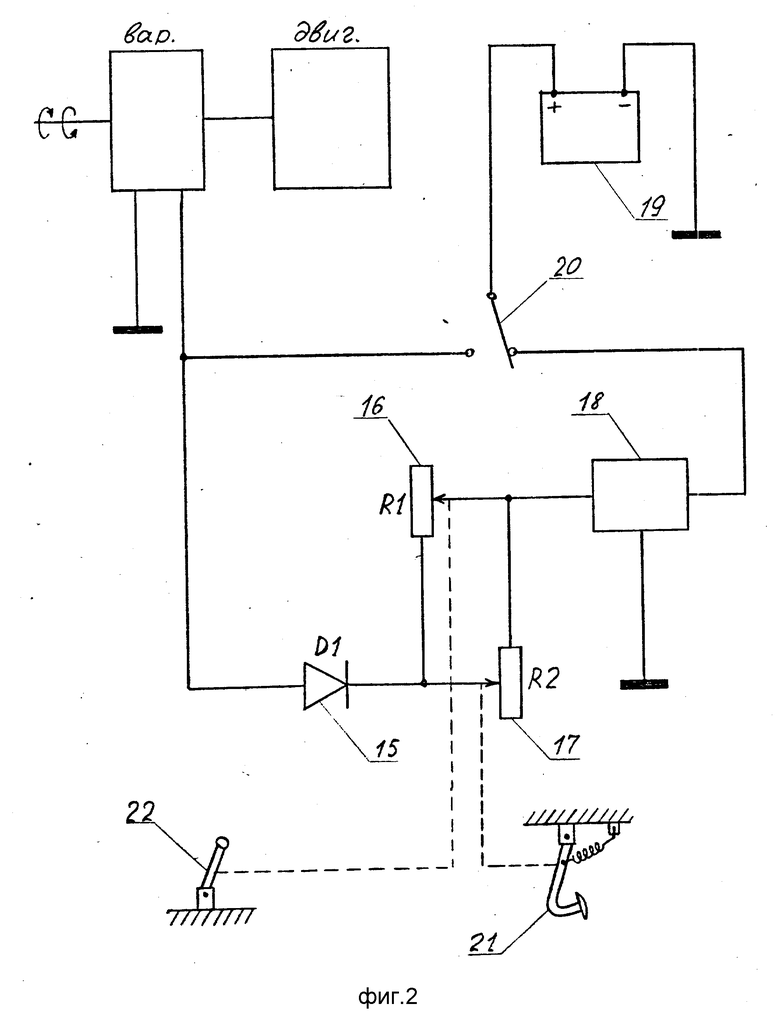
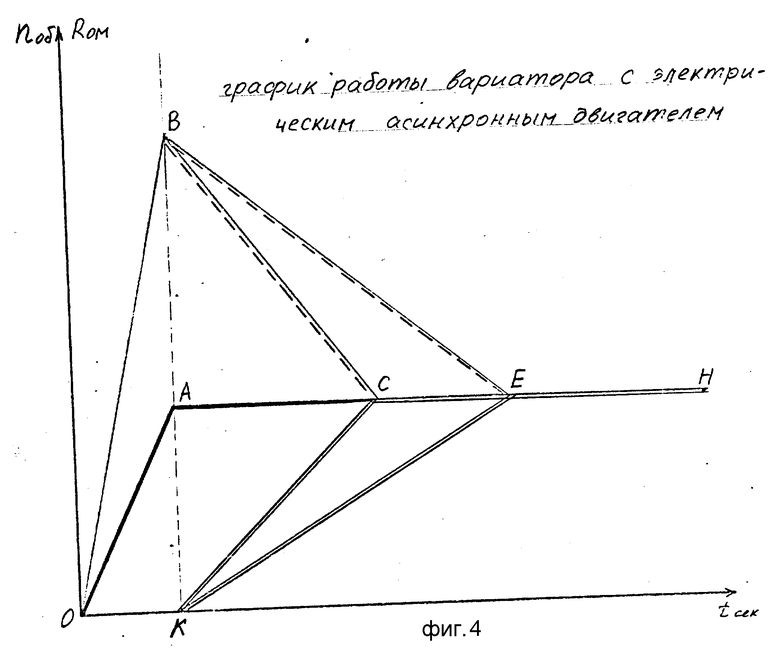
На фиг. 1 изображена кинематическая схема вариатора; на фиг. 2 - электрическая схема управления вариатора; на фиг. 3 график работы вариатора с тепловым двигателем; на фиг. 4 график работы вариатора с электрическим асинхронным двигателем.
Вариатор планетарный бесступенчатый устроен следующим образом.
Ведущий вал 1 двигателя (например, теплового) состыкован соосно через подшипниковый узел 2 с выходным валом 3. Два последовательно расположенных на указанных валах планетарных ряда: первый на ведомом 3 и второй на ведущем 1. На ведущем валу 1 жестко установлены малое центральное колесо 4 первого планетарного ряда и водило 5 с сателлитами 6 второго планетарного ряда. На ведущем валу 1 с возможностью вращения установлены малое центральное колесо 7 и большое центральное колесо 8 второго планетарного ряда. Водило с сателлитами 10 первого планетарного ряда жестко связано с большим центральным колесом 8.Большое центральное колесо 11 первого планетарного ряда является выходным и жестко закреплено на выходном валу 3. Малое центральное колесо 7 через фрикционный элемент 12 соединено с ротором-маховиком 13, который свободно вращается на ведущем валу 1. Фрикционный элемент 12 работает только на включение-выключение. Электрическая машина 9 состоит из ротора-маховика 13 и обмоток 14 неподвижного статора. Она используется два управления вариатором как генератор тока, а также как электродвигатель-стартер в режиме запуска теплового двигателя. В первом случае обмотки 14 статора включаются через электрическую цепь, содержащую выпрямитель 15 ( D1 фиг. 2), реостаты 16(R1) и 17(R2), регулятор напряжения 18 и переключатель 20 к клеммам аккумулятора 19. Во втором случае обмотки 14 через переключатель 20 подключаются непосредственно к аккумулятору 19. С реостатом 16 (R1) корреляционно связана педаль акселератора 21, а с реостатом 17 (R2) - рычаг 22 управления режимами. Большие центральные колеса 11 и 8 снабжены ленточными тормозами 24 и 23.
Вариатор планетарный бесступенчатый работает следующим образом.
При первоначальном запуске теплового двигателя большое центральное колесо 11 с выходным валом 3 затормаживаются тормозом 23. Переключателем 20 обмотка 14 статора подключается непосредственно к аккумулятору 19. В этом случае электрическая машина 9 работает как электродвигатель-стартер. Обмотка 14 статора, намагничиваясь, притягивает диск фрикционного элемента 12, который входит в зацепление с ротором-маховиком 13. Ротор-маховик 13 через фрикционный элемент 12, малое центральное колесо 7 и планетарные ряды раскручивает вал 1 теплового двигателя в сторону своего вращения, запуская его. Тепловой двигатель, запустившись, выходит на режим холостого хода (на фиг. 3 прямая AO). Переключатель 20 отключает аккумулятор 19 от обмотки 14 статора и подключает его к выходу регулятора напряжения 18. Вал 1 теплового двигателя через планетарные ряды и вращает ротор-маховик 13. В этом случае электрическая машина 9 работает как генератор тока. Угловая скорость вращения ротора-маховика 13 при заторможенном большом центральном колесе 11 определяется угловой скоростью вращения ведущего вала 1 и угловой скоростью вращения большого центрального колеса 8. Обозначим: X угловая скорость вращения ведущего вала 1 теплового двигателя. Тогда:
n8=X•Z4/(Z4+Z11), (1)
где n8 угловая скорость вращения большого центрального колеса 8;
Z4 и Z11 количество зубьев малого 4 и большого 11 центральных колес.
Большое центральное колесо 8 через сателлиты 6 водила 5 передает вращение малому центральному колесу 7 в соответствии с соотношением:
где угловая скорость вращения малого центрального колеса 7;
угловая скорость вращения малого центрального колеса 7;
n8 угловая скорость вращения большого центрального колеса 8;
Z7 и Z8 количество зубьев соответственно малого 7 и большого 8 центральных колес.
Водило 5, вращаясь с валом 1, также передает вращение малому центральному колесу 7 относительно большого центрального колеса 8 в соответствии с соотношением:
Обозначим  обороты малого центрального колеса 7 и ротора-маховика 13. В итоге получаем:
обороты малого центрального колеса 7 и ротора-маховика 13. В итоге получаем:
C = (Z
где: ZA= Z11= Z8; Zc= Z4= Z7 поскольку параметры соответствующих колес первого и второго планетарных рядов принимаем одинаковыми.
Ротор-маховик 13 раскручивается до значения C (на фиг. 3 прямая OB), которое в оптимальном случае должно быть равным максимальным оборотам теплового двигателя, необходимым для его эксплуатации.
После отпускания тормоза 23 большое центральное колесо 11 получает дополнительное вращение за счет того, что после нажатия на педаль акселератора 21, уменьшится общее сопротивление в электрической цепи вследствие уменьшения сопротивления в реостате 16 (R1) и увеличивает вращающий момент на валу двигателя. Часть увеличивающегося вращающего момента от двигателя, численно равная обратной зависимости, выраженной формулой (4), передается на ротор-маховик 13, стремясь увеличить его обороты. Электромагнитное поле обмотки 14 статора, увеличиваясь вследствие уменьшения сопротивления ротора-маховика 13, создавая тормозящий момент. Таким образом, при определенных расчетных отношениях ротор-маховик 13 сохраняет свои обороты (на фиг. 3 прямая BC). Но при увеличении угловой скорости вращения водила 5 вместе с ведущим валом 1 и относительно неизменной угловой скорости вращения малого центрального колеса 7, большому центральному колесу 8 передается дополнительное вращение за счет обегания сателлитами 6 малого центрального колеса 7.
Δn8=ΔX•(ZA+Zc)/ZA, (5)
где Δn8 прирост оборотов большого центрального колеса 8;
ΔX прирост оборотов двигателя.
Большое центральное колесо 8, через сателлиты 10, обегает малое центральное колесо 4 и передает полученный дополнительный момент вращения большому центральному колесу 11 и выходному валу 3 в соответствии с соотношением:
где  дополнительный прирост числа оборотов колеса 11, полученный за счет увеличения числа оборотов большого центрального колеса 8.
дополнительный прирост числа оборотов колеса 11, полученный за счет увеличения числа оборотов большого центрального колеса 8.
Большое центральное колесо 11 с выходным валом 3 получает вращение от малого центрального колеса 4 через сателлиты 10 в соответствии с соотношением:
где  прирост числа оборотов колеса 11 за счет увеличения числа оборотов двигателя.
прирост числа оборотов колеса 11 за счет увеличения числа оборотов двигателя.
Обороты выходного вала 3 складываются из суммы:
Обозначим: y угловая скорость вращения выходного вала 3.

Но в соответствии с (5):
Δn8 = ΔX•(ZA+Zc)/ZA,
Тогда:
Эта зависимость справедлива, если C const или C 0.
Общая зависимость y от X будет:
y = X(Z
В целом же величина "y" зависит также от угловой скорости вращения ротора-маховика 13, т.е. от "C". Отсюда зависимость y от C при X 0 находится из выражения:
y n8(ZA+Zc)/ZA, (11)
а n8= -C Zc/ZA; y = -(ZAZc+Z
Общая зависимость y от X и C будет:
y = (Z
Из этой зависимости видно, что, если C=const (на фиг. 3 прямая BC), а X увеличивается, то увеличивается и y. В некоторый момент будет X C. Тогда y X реализуется прямая передача. В этом случае относительное вращение колес прекратится, весь вариатор будет вращаться как одно целое. При дальнейшем увеличении оборотов двигателя от нарастающего взаимного вращения резко увеличивается трение, которое будет препятствовать дальнейшему увеличению оборотов двигателя. Таким образом, при увеличении X до значений, больших C появляется некоторый саморегулирующий момент, препятствующий эксплуатации двигателя на оборотах, больших максимальных расчетных.
На прямой передаче при максимальных оборотах теплового двигателя сопротивления электрической цепи будет наименьшим, а ток, вырабатываемый электрической машиной 9, работающей как генератор, будет максимальным. Эта электроэнергия используется для питания систем зажигания, других агрегатов, обеспечивающих работу двигателя для подзарядки аккумулятора 19. Однако избыток вырабатываемой энергии понижает КПД вариатора. Количество вырабатываемой электроэнергии можно уменьшить за счет изменения параметров ротора-маховика 13.
Сопротивление R2 (фиг. 2) включено параллельно R1 и является дополнительным регулятором, независимым от педали акселератора 21. При уменьшении сопротивления R2 и изменения сопротивления R1 от педали акселератора общее сопротивление электрической цепи будет уменьшаться по иной зависимости (на фиг. 3 прямая DE). Тормозящий момент вследствие более быстрого уменьшения сопротивления электрической цепи возрастает быстрее, чем вращающий момент двигателя и заставит уменьшить обороты ротора-маховика 13. В определенный момент уменьшающиеся обороты ротора-маховика 13 и увеличивающиеся обороты двигателя совпадут по значению (на фиг. 3 прямые BE и AE соответственно) начнется реализоваться прямая передача, но при более низких значениях оборотов теплового двигателя (на фиг. 3 прямая EH).
Рассмотрим работу вариатора на различных режимах работы транспортного средства.
Движение на прямых передачах. Движение на прямой передаче возможно при различных скоростях движения транспортного средства. При переходе с большей скорости на меньшую, сохраняя режим прямой передачи вариаторов, необходимо ручкой 22 уменьшить сопротивление реостата 17 (R2 и, отпуская педаль акселератора 21, уменьшить обороты двигателя. И наоборот, при переходе с низкой скорости на более высокую, необходимо ручкой 22 уменьшить сопротивление реостата 17 (R2) и, нажимая на педаль акселератора 21, увеличить обороты двигателя. При этом возможен некоторый "провал" в динамике набора скорости, так как часть увеличивающего вращающего момента двигателя будет затрачиваться на раскручивание ротора-маховика 13.
Торможение двигателем. При установившемся режиме движения, если резко отпустить педаль акселератора 21, тепловой двигатель; ввиду его приемистости, быстро уменьшит обороты, сопротивление 16 (R1) увеличится, тормозящий момент на роторе-маховика 13 уменьшится. Инерция ротора-маховика 13 будет стремиться сохранить имеющийся вращающий момент, который через элементы вариатора будет направлен против вращения выходного вала 3, создавая дополнительный тормозящий момент, и который сведется к нулю, когда вновь наступит установившийся режим движения, но на более низком уровне, при меньших оборотах двигателя.
Кратковременная остановка автомобиля с выключением теплового двигателя. Применяется для экономии топлива и как экологическая мера в условиях езды по городу. При остановке двигателя и выключении бортового электропитания обмотка 14 статора обесточивается, подпружиненный фрикционный элемент 12 выходит из зацепления с ротором-маховиком 13 и дает ему возможность вращаться свободно, сохраняя инерцию вращения. При последующем включении электропитания обмотка 14 статора намагничивается и притягивает диск фрикционного элемента 12, который входит в зацепление с ротором-маховиком 13, энергия вращения которого передается через элементы вариатора на вал 1 теплового двигателя, запуская его. При этом нет необходимости затормаживать большое центральное колесо 11, поскольку инерция покоя стоящего автомобиля достаточна для удержания колеса 11 относительно неподвижно с целью передачи энергии вращения ротора-маховика 13 на вал 1 горячего двигателя.
Задний ход автомобиля. Эта передача обеспечивается торможением большого центрального колеса 8 тормозом 24.
При этом на большое центральное колесо 11 и выходной вал 3 передается реверсивное вращение в соотношении с зависимостью по формуле 2. Это вращение не регулируется вариатором и зависит только от оборотов двигателя.
Вариатор планетарный бесступенчатый работает и с электродвигателем. Режим работы вариатора совместно, с асинхронным электродвигателем иной, нежели в случае с тепловым двигателем.
Перед началом движения большое центральное колесо 11 заторможено ленточным тормозом 23. Тяговый асинхронный электродвигатель подключается к источнику электроэнергии и выводится на номинальный режим. При этом через ведущий вал 1, фрикционный элемент 12 раскручивается ротор-маховик 13 генератора согласно передаточному соотношению 4, т.е. в несколько раз быстрее чем тяговый электродвигатель.
Для начала движения растормаживается большое центральное колесо 11 и, одновременно, статорная обмотка 14 генератора подключается в электрическую цепь. Генератор, вырабатывая электроэнергию, создает на роторе-маховике тормозящий момент, уменьшающий его обороты, вследствие чего, согласно выражению 13, на выходном валу 3 возникает вращающий момент. Регулируя сопротивление реостатом, включенным в электрическую цепь статора генератора, можно изменять тормозящий момент на роторе-маховике 13 и, как следствие, вращающий момент на выходном валу 3. При совпадении оборотов ведущего вала 1 и его ротора-маховика реализуется прямая передача. Электроэнергия, вырабатываемая генератором, через преобразующее устройство возвращается в питающую электрическую сеть.
Чтобы не затрачивать часть мощности тягового электродвигателя на вращение генератора, вырабатывающего электроэнергию, в режиме прямой передачи можно предусмотреть в конструкции дополнительную муфту, блокирующую между собой ведущий вал 1 и ротор-маховик 13 при совпадении их оборотов с одновременным отключением старторной обмотки от электрической цепи и, тем самым, повысить КПД конструкции.
Замедление движения производится, в отличие от случая с тепловым двигателем, только подтормаживанием выходного вала с одновременным разблокированием ведущего вала 1 и ротора-маховика 13 (статорная обмотка отключена от электрической цепи). При этом часть механической энергии тягового электродвигателя затрачивается на раскручивание ротора-маховика, с целью ее аккумуляции для последующего разгонного режима. При кратковременных остановках (продолжительностью в несколько минут) целесообразно отключать тяговый электродвигатель от питающей электросети с одновременным разъединением фрикционного элемента 12, давая возможность ротору-маховику свободно вращаться, сохраняя механическую энергию.
Реверсирование выходного вала осуществляется аналогично вариатору с тепловым двигателем, с разъединением фрикционного элемента 12. Более широкие возможности вариатора планетарного бесступенчатого с электродвигателем можно получить, если использовать вместо генератора двигатель-генератор (синхронный, асинхронный, коллекторный и др.).
Конструкцию вариатора планетарного бесступенчатого можно применить в перспективных транспортных средствах со смешанной тягой тепловым и электродвигателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| ВАРИАТОР ПЛАНЕТАРНЫЙ | 2007 |
|
RU2374528C2 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ (ВАРИАНТЫ) | 2011 |
|
RU2483940C1 |
| СИСТЕМА ПЕРЕДАЧИ С РАЗДЕЛЕНИЕМ ПОТОКА МОЩНОСТИ С ЧЕТЫРЬМЯ ОТВОДАМИ | 2004 |
|
RU2334142C2 |
| ЗУБЧАТАЯ ПЕРЕДАЧА С ПЕРЕМЕННОЙ СКОРОСТЬЮ | 2003 |
|
RU2247271C2 |
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1997 |
|
RU2166681C2 |
| ТРАНСМИССИЯ ЭЛЕКТРОМОБИЛЯ | 1997 |
|
RU2123944C1 |
| РЕВЕРСИВНЫЙ ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ВАРИАТОР | 1993 |
|
RU2068134C1 |
| БЕССТУПЕНЧАТЫЙ ЗАМКНУТЫЙ ПЛАНЕТАРНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 2006 |
|
RU2314446C1 |
| БЕССТУПЕНЧАТЫЙ ЗАМКНУТЫЙ ПЛАНЕТАРНЫЙ ГИДРОМЕХАНИЧЕСКИЙ ВАРИАТОР | 1996 |
|
RU2110720C1 |

Использование: машиностроение. Сущность изобретения: вариатор планетарный бесступенчатый содержит соосный ведущий и ведомый валы, два последовательно расположенных планетарных ряда, каждый из которых включает малое и большое центральные колеса и водило с сателлитами, механизм управления и тормоза. Механизм управления выполнен в виде электрической машины, включающей ротор-маховик, неподвижные обмотки статора. Ротор-маховик выполнен в виде цилиндра со встроенными по периферии постоянными магнитами и свободно вращается на ведущем валу между неподвижными обмотками статора. Обмотки статора включены в электрическую цепь. Сопротивление электрической цепи в обмотке статора выполнено регулируемым. Боковая поверхность ротора-маховика через фрикционный элемент жестко связана с малым центральным колесом второго планетарного ряда. Большое и малое центральные колеса первого планетарного ряда жестко установлены соответственно на ведомом и ведущих валах. Большое и малое центральные колеса второго планетарного ряда установлены с возможностью вращения на ведущем валу, водило этой передачи жестко закреплено на этом же валу, а большое центральное колесо жестко связано с водилом первого планетарного ряда. 4 ил.
Вариатор планетарный бесступенчатый преимущественно для транспортного средства, содержащий соосные ведущий и ведомый валы, два планетарных ряда, каждый из которых включает малое и большое центральные колеса и водило с сателлитами, механизм управления и тормоза, отличающийся тем, что механизм управления выполнен в виде электрической машины, ротор-маховик которой установлен с возможностью вращения на ведущем валу и выполнен в виде цилиндра со встроенными по периферии постоянными магнитами, расположенными между неподвижными обмотками статора, включенными в электрически регулируемую цепь, при этом большое и малое центральные колеса первого планетарного ряда жестко установлены соответственно на ведомом и ведущем валах, из которых большое центральное колесо связано с тормозом, большое и малое центральные колеса второго планетарного ряда установлены с возможностью вращения на ведущем валу, из которых большое центральное колесо жестко связано с водилом первого планетарного ряда и с вторым тормозом, малое центральное колесо посредством фрикционного элемента жестко связано с ротором-маховиком, а водило с сателлитами этого же планетарного ряда жестко закреплено на ведущем валу.
| Кудрявцев В | |||
| Н | |||
| Планетарные передачи | |||
| Справочник.- М.: Машиностроение, 1977, с | |||
| Способ обработки шкур | 1921 |
|
SU312A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |

