Область техники
Изобретение относится к измерительной технике, а конкретно, лазерной (оптической) локации и может быть использовано в системах обнаружения и распознавания целей, в системах предупреждения столкновения транспортных средств, в навигационных устройствах и в системах охранной сигнализации.
Предшествующий уровень техники
Оптический локатор имеет существенное достоинство по сравнению с радиолокатором. Известно, что радиолокатор не может действовать сквозь плазменные среды, в то время как оптическое излучение проходит через плазму практически без потерь (Федоров Б.Ф. «Лазерные приборы и системы летательных аппаратов». - М.: Машиностроение, 1979 г.).
Под лазерной локацией понимается режим функционирования лазерного локатора (ЛЛ), включающий в себя обзор заданной области пространства (в общем случае - по всем измеряемым координатам), обработку отраженных сигналов, принятие решения о наличии или отсутствии объектов во всей зоне в целом, либо с указанием конкретных элементов разрешения, в которых они присутствуют.
Способ обзора пространства характеризуется конфигурацией зоны обзора, последовательностью осмотра угловых позиций и длительностью зондирования.
По способам обзора пространства, включающим методы сканирования и соотношения диаграмм направленности источника и приемника оптического излучения, характеризуемых телесными углами полей зрения передающей оптической системы (ωпер) и принимающей оптической системы (ωпр), различают три варианта построения ЛЛ (Карасик В.Е, Орлов В.М. "Лазерные системы видения". - М.: Издательство МГТУ им. Н.Э.Баумана, 2001, с.46-53; Малашин М.С., Каминский Р.П., Борисов Ю.Б. «Основы проектирования лазерных локационных систем». - М.: Высшая школа, 1983 г, с.5-25, 118-135).
В первом варианте источник оптического излучения имеет узкое конусообразное поле зрения, а приемник оптического излучения - широкое, т.е. ωпер<<ωпр.
Изображение формируется в результате последовательного сканирования конусообразным полем зрения передающей оптической системы (ПОС) в пределах конусообразного поля зрения принимающей оптической системы (ПрОС). В качестве фотодетектора используется одноэлементный фотоприемник (фотодиод, фотоэлектронное устройство).
К достоинствам первой системы следует отнести простоту конструкции и малую вероятность ложного обнаружения объекта, т.к. даже в случае неравнояркого фона его значение на входе приемника постоянно по полю растра из-за его интегрирования по пространству. Недостатком системы является то, что отношение сигнал/шум в таких системах, как правило, невелико из-за отсутствия пространственной фильтрации.
Во втором варианте ПОС имеет широкое поле зрения, освещающее все поле обзора, а ПрОС - узкое поле зрения, т.е. ωпер>>ωпр.
В этом ЛЛ сканирование отсутствует, а в качестве фотодетектора используется многоэлементный фотоприемник.
Системы второго типа весьма эффективны при использовании метода стробирования по дальности. Для реализации этого метода помимо мощного импульсного источника подсвета требуется преобразователь изображения, оснащенный быстродействующим затвором. Недостатками такой системы являются отсутствие скрытности ввиду широкого поля зрения ПОС, высокая стоимость многоэлементного приемника и недостаток пространства для реализации его топологии.
Наиболее близким к заявляемому изобретению является способ лазерной локации третьего типа, принятый за прототип (Карасик В.Е, Орлов В.М. "Лазерные системы видения". - М.: Издательство МГТУ им. Н.Э.Баумана, 2001, с.46-53).
В прототипе оба поля зрения узкие и примерно равны, т.е. ωпер≈ωпр, а поле зрения ПрОС перемещается в пространстве синхронно с полем зрения ПОС.
В прототипе система обладает достаточно большим отношением сигнал/шум и слабым влиянием на чувствительность ЛЛ эффектов, обусловленных когерентностью лазерного излучения (спекл - шум).
Указанный в прототипе способ лазерной локации обеспечивает высокую точность определения координат объекта в зоне обзора пространства, что обусловлено узкими конусообразными полями зрения ПОС и ПрОС, обеспечивающих высокую плотность световой энергии и высокое пространственное разрешение.
К недостаткам прототипа следует отнести конструктивную сложность узлов схемы синхронного сканирования. Кроме того, узкое поле зрения ПОС и ПрОС существенно затрудняет поиск объекта в зоне обзора пространства, что ведет к усложнению системы поиска и сопровождения объекта, т.к. требует высокой частоты сканирования.
Например, пусть контролируемое пространство представляет собой конус с телесным углом 1 ср, а расходимость поля зрения ПОС и ПрОС в продольном сечении составляет 10 мрад (плоский угол), тогда для полного обзора контролируемого пространства потребуется ≈104 мгновенных экспозиций, а с учетом некоторого перекрытия указанная величина будет более высокая. При розеточной форме сканирования (Справочник по инфракрасной технике. / Под ред. У.Волф, Г.Цисис, Том 4, - М.: Мир, 1999 г, с.331-338), когда оптические элементы вращаются в противоположные стороны с угловой скоростью ≈120000 оборотов в минуту (практически предельная скорость вращения), все контролируемое пространство будет отсканировано за время ~1 с. То есть для указанной системы, при заданном поле обзора, практически возможно слежение только за объектами с малой скоростью.
Раскрытие изобретения
Задачей изобретения является повышение скорости поиска и сопровождения объекта обнаружения, при одновременном увеличении зоны обзора пространства.
Технический результат заключается в увеличении зоны чувствительности образованной пересечением пирамидообразных разверток полей зрения ПОС и ПрОС.
Этот результат достигается тем, что для лазерной локации заданной области пространства (обнаружения в ней постороннего объекта) создают зону чувствительности пересекающимися полями зрения передающей оптической системы и принимающей оптической системы, улавливают отраженный сигнал от постороннего объекта при попадании его в зону чувствительности, судят о местонахождении объекта по отраженному сигналу и ориентации зоны чувствительности. Согласно изобретению, создание зоны чувствительности осуществляют пересечением разверток полей зрения передающей и принимающей оптических систем в виде четырехгранных пирамид со сферическими поверхностями в нижнем основании с вершинами в центрах объективов, с боковыми гранями в виде секторов круга.
При образовании зоны чувствительности секущие круговые секторы разверток полей зрения принимающей и передающей оптических систем с большим углом при вершине, проходящие через оптическую ось объективов принимающей и передающей оптических систем, располагают в одном направлении.
Плоскость развертки зоны чувствительности проведена перпендикулярно поперечному сечению зоны чувствительности и ориентирована вдоль оптических осей объективов ПОС и ПрОС. При этом указанное поперечное сечение зоны чувствительности заключено между боковыми гранями пирамид с меньшими углами при вершинах.
Для увеличения зоны обзора пространства производят сканирование пространства зоной чувствительности в направлении, перпендикулярном плоскости развертки зоны чувствительности, или производят сканирование, вращая зону чувствительности вокруг выбранной оси. Кроме того, создают пересекающиеся в пространстве зоны чувствительности, заполняющие собой заданную область пространства и ориентируют между собой получающиеся зоны чувствительности таким образом, чтобы сигнал о присутствии постороннего объекта при попадании его в пересекающиеся зоны чувствительности давал информацию о его мгновенных координатах.
Толщину зоны чувствительности в направлении «λ-λ», перпендикулярном плоскости развертки зоны чувствительности, определяют из соотношения:
а≥(Vоб+Vск)×n/v-b,
где а - толщина зоны чувствительности в направлении «λ-λ», перпендикулярном плоскости развертки зоны чувствительности;
b - характерный размер (протяженность) объекта обнаружения;
Vоб - скорость объекта, в направлении, перпендикулярном плоскости развертки зоны чувствительности;
Vcк - скорость сканирования пространства зоной чувствительности в направлении, перпендикулярном плоскости развертки зоны чувствительности;
n - количество импульсов излучения лазерного источника света в одном цикле зондирования;
v - тактовая частота излучающего лазерного источника света.
В заявляемом способе зона обзора пространства увеличивается за счет увеличения зоны чувствительности, образованной в результате пересечения пирамидообразных разверток полей зрения ПОС и ПрОС, по сравнению с зоной чувствительности в прототипе, образованной пересечением конусообразных полей зрения ПОС и ПрОС.
По сравнению с прототипом, при равенстве телесных углов полей зрения ПОС и ПрОС, и при одинаковых скоростях сканирования пространства зоной чувствительности, вероятность попадания объекта в получающуюся при сканировании зону обзора пространства в заявляемом способе значительно выше, чем в прототипе.
Развертки полей зрения ПОС и ПрОС обеспечивают больший "сметаемый" объем, чем в прототипе, при сканировании пространства веерообразной зоной чувствительности в направлении, перпендикулярном плоскости развертки зоны чувствительности. За счет этого повышается скорость поиска и сопровождения объекта обнаружения по сравнению с прототипом.
В располагаемых нами источниках информации не обнаружено технических решений, содержащих в совокупности признаки, сходные с отличительными признаками заявляемого способа лазерной локации. Следовательно, изобретение соответствует критерию "изобретательский уровень".
Наличие новых существенных признаков совместно с известными и общими с прототипом позволило создать новое техническое решение - «Способ лазерной локации заданной области пространства». Способ обеспечивает увеличение зоны обзора пространства за счет использования веерообразной зоны чувствительности. Это позволит ускорить поиск, идентификацию и сопровождение высокоскоростных объектов в широком диапазоне дальностей и телесных углов.
Предшествующий уровень техники
Известно устройство оптической локации (Справочник по инфракрасной технике / Под ред. У.Волф, Г.Цисис, Том 4, - М.: Мир, 1999 г, с.331-338, Авторское свидетельство СССР №1649270, кл. G01C 3/08, 1988 г.), содержащее импульсный передатчик, блок обзора пространства, приемоответчик, блок обработки информации, индикатор дальности и распознавания. Указанное устройство обеспечивает автоматическое распознавание и сопровождение движущегося объекта, но ему свойственна необходимость оснащения наблюдаемого объекта приемоответчиком, выполненным в виде кодируемой матрицы и матрицы уголковых отражателей.
Такая система может быть применена только при обнаружении и сопровождении заранее подготовленных объектов, например, в системах, оснащенных блоком распознавания «свой - чужой», или в системах охранной сигнализации, когда имеется возможность размещения на контролируемой территории соответствующих ответчиков, отражателей, зеркал и т.п. (Авторское свидетельство СССР №1649270, кл. G01C 3/08, 1988 г.)
Наиболее близким к заявляемому изобретению является измеритель малых расстояний (Авторское свидетельство СССР №491029, кл. G01C 3/00, 1976 г.), принятый за прототип устройства.
Указанный измеритель содержит блок обзора пространства (БОП), включающий ПОС и ПрОС с пересекающимися полями зрения, источник светового излучения, фотоприемное устройство (ФПУ) и вычислительное устройство, так называемый регистратор. ПОС выполнена в виде коллиматора с узким полем зрения. Поле зрения ПрОС характеризуется значительно большим углом расходимости, при этом зона чувствительности БОП практически представляет собой линию. ФПУ выполнено в виде оптико-электронного преобразователя (ОЭП) и двух пространственных фильтров, один из которых установлен перед ОЭП, а другой после него. ФПУ осуществляет модуляцию принимаемого оптического потока, падающего на фоточувствительный элемент по длительности, в зависимости от положения регистрируемого объекта в зоне чувствительности. Вычислительное устройство, содержащее последовательно расположенные усилитель, схему формирования сигналов и счетчик, выдает на счетчик количество импульсов, пропорциональное расстоянию до объекта.
Узкое поле зрения ПОС в указанном измерителе обеспечивает достаточно высокую точность измерения расстояния до наблюдаемого объекта за счет значительной плотности световой энергии и позволяет системе иметь высокое пространственное разрешение.
Однако широкое поле зрения ПрОС влечет за собой ухудшение чувствительности к фоновым засветкам, что повышает величину принимаемых помех. Величина отношения сигнал/помеха является важнейшим параметром дальномерных устройств, т.к. именно она определяет при конкретной конструкции дальномера такие важные его характеристики, как дальность и точность.
Для уменьшения уровня принимаемых помех в указанном измерителе применяются пространственные фильтры, предназначенные для выделения сигнала, лежащего в плоскости пересечения узкого конусообразного поля зрения ПОС с широким конусообразным полем зрения ПрОС. Но это существенно уменьшает диапазон измеряемых расстояний, то есть снижает пространственное разрешение измерителя вследствие того, что часть изображения наблюдаемого объекта перекрывается непрозрачной частью фильтра. Кроме того, ввиду краевых эффектов, пространственный фильтр не в полной мере решает задачу селекции помеховых сигналов. Поэтому указанное устройство в целом не обеспечивает измерение больших расстояний.
Еще одним недостатком данного измерителя является то, что узкое поле зрения ПОС существенно затрудняет поиск объекта, что ведет к существенному усложнению системы поиска и сопровождения объекта, т.к. требует сканирования контролируемого пространства узким лучом. За единицу времени узкий луч обегает малую зону обзора пространства, являющуюся «сметаемым объемом».
Раскрытие изобретения.
Второй задачей данного изобретения является создание помехоустойчивого устройства с увеличенным диапазоном измеряемых расстояний, расширенной зоной обзора пространства, а также конструктивно упрощенными узлами синхронного сканирования.
Технический результат заключается в увеличении телесного угла поля зрения ПОС обеспечением развертки поля зрения ПОС в одной плоскости, его геометрическое согласование с полем зрения ПрОС, обеспечение приема полного отраженного сигнала от цели, что дает высокую пространственную разрешающую способность и значительно меньшие по интенсивности фоновые сигналы.
Этот результат достигается тем, что в устройстве для лазерного обнаружения постороннего объекта в заданной области пространства, содержащем вычислительное устройство, выход которого соединен с индикатором распознавания объекта, передающую и принимающую оптические системы с пересекающимися полями зрения, образующими зону чувствительности, снабженные объективами, в фокальной плоскости которых размещены источник светового излучения и фотоприемное устройство, согласно изобретению, источник светового излучения выполнен лазерным и импульсным, а в объективах передающей и принимающей оптических систем установлены цилиндрические линзы. Эти линзы обеспечивают развертки полей зрения ПОС и ПрОС в виде четырехгранных пирамид со сферической поверхностью в основании и боковыми гранями в виде секторов круга, причем цилиндрические линзы установлены таким образом, что их плоскости сечения наибольшей кривизны параллельны друг другу.
Импульсный лазерный источник светового излучения передающей оптической системы может быть размещен в фокальной плоскости объектива таким образом, что длинная сторона прямоугольника его светящегося пятна расположена перпендикулярно плоскости сечения наибольшей кривизны цилиндрической линзы.
Передающая и принимающая оптические системы могут быть смонтированы в блок обзора пространства с возможностью изменения их взаимного расположения при юстировке. Блоки обзора пространства могут быть установлены на одной панели с возможностью изменения пространственной ориентации относительно панели. Панель может быть установлена на опорной поверхности с возможностью изменения своей пространственной ориентации относительно этой поверхности. Устройство может быть снабжено приводом для изменения пространственной ориентации блоков обзора пространства относительно друг друга и всей панели относительно опорной поверхности.
В заявляемом техническом решении узлы синхронного сканирования конструктивно упрощены за счет того, что в процессе сканирования не изменяется взаимное расположение объективов ПОС и ПрОС на их общей панели, а панель осуществляет простое движение - вращение вокруг выбранной оси.
Объективы ПОС и ПрОС установлены на базовом расстоянии «с» один от другого, а их оптические оси пресекаются под углом «α». В общем виде для заявляемого технического решения необязательным является требование пересечения оптических осей объективов, они могут быть скрещивающимися прямыми. В этом случае углом «α» считается угол между прямыми, лежащими в одной плоскости и параллельными оптическим осям объективов (Бронштейн И.Н., Семендяев К.А. «Справочник по математике», - М.: Государственное издание технико-теоретической литературы, 1956 г., с.170).
Указанный фактор улучшает возможности компоновки ПОС и ПрОС в БОП и значительно упрощает требования по их взаимной юстировке. Параметры «с», «α» и поля зрения приемо-передающих оптических систем определяют конфигурацию зоны чувствительности одного БОП.
В заявляемом техническом решении расширение диапазона измеряемых расстояний достигается применением импульсного полупроводникового лазера. В качестве источника света в ПОС применен импульсный полупроводниковый лазер, при этом, как правило, лазерный луч представляет собой в сечении прямоугольное светящееся пятно. В ПОС источник света расположен таким образом, что цилиндрическая линза обеспечивает развертку светового луча вдоль длинной стороны прямоугольника светового пятна, причем цилиндрическая линза может обеспечить развертку на угол γ≈(0,5-0,7) радиан, или (30-40) градусов.
Таким образом, поле зрения ПОС представляет собой объем в виде четырехгранной пирамиды с основанием в форме сферической поверхности со сферическими координатами в виде функции f (r, β, γ), где r - радиус-вектор поля зрения ПОС, β - угол расходимости лазерного излучения в плоскости, перпендикулярной плоскости развертки, γ - угол расходимости лазерного излучения в плоскости развертки.
Аналогичным образом выполнена ПрОС, у которой поле зрения представляет собой четырехгранную пирамиду с основанием в форме сферической поверхности, со сферическими координатами в виде функции F (R, δ, ε), где R - радиус-вектор поля зрения ПрОС, δ - угол расходимости лазерного излучения в плоскости, перпендикулярной плоскости развертки, ε - угол расходимости лазерного излучения в плоскости развертки.
Заявляемое устройство обладает более расширенной зоной обзора пространства по сравнению с прототипом. Пересекаясь между собой, развертки полей зрения ПОС и ПрОС образуют веерообразную зону чувствительности. За единицу времени веерообразная зона чувствительности отсканирует большую зону обзора пространства, чем узкий конусообразный луч поля зрения ПОС в прототипе.
Это обеспечивает больший телесный угол общей зоны чувствительности локатора, при этом реализуется достаточно простое конструктивное выполнение сканирующих устройств, они могут осуществлять вращательное или возвратно-поступательное движение.
Заявляемое устройство более помехоустойчиво, по сравнению с прототипом, за счет снижения чувствительности к фоновым засветкам, так как развертки полей зрения ПОС и ПрОС пирамидообразные, во фронтальной плоскости узкие, в профильной плоскости расширены и геометрически согласованы.
Телесный угол поля зрения ПОС существенно больше описанного в прототипе, так как обеспечивается развертка поля зрения ПОС в одной плоскости цилиндрической линзой. Тем не менее, применение источника света в виде импульсного лазера обеспечивает достаточно высокую плотность энергии светового потока. Так, мощность излучения передатчика может составлять ~(107-108) Вт (Справочник по инфракрасной технике. / Под ред. У.Волф, Г.Цисис, Том 4, - М.: Мир, 1999 г, с.331-338), что позволяет компенсировать потерю мощности светового потока, вызванного увеличением телесного угла ПОС.
В то же время, в заявляемом устройстве телесный угол ПрОС на ~1-2 порядка меньше соответствующего угла ПрОС прототипа. При этом поле зрения ПрОС, геометрически согласованное с полем зрения ПОС, обеспечивает прием полного отраженного сигнала от цели, что дает высокую пространственную разрешающую способность и значительно меньшие по интенсивности фоновые сигналы.
То есть построенная таким образом ПрОС играет роль пространственного оптического фильтра. Источниками помеховых излучений могут быть естественный фон, солнечные блики, внешние источники искусственного характера, в том числе специальные средства противодействия (Якушенков Ю.Г., Луканцев В.Н., Колосов М.П. «Методы борьбы с помехами в оптико-электронных приборах». - М.: Радио и связь, 1981 г, с.5-172). Функция фильтрации поступающих в ПрОС источников излучений помехи обеспечивается ФПУ и вычислительным устройством, при этом может быть осуществлена селекция импульсов по амплитуде за счет применения амплитудного дискриминатора, и по времени прихода импульсов за счет применения схемы совпадения. Селекция отраженных оптических сигналов по частоте обеспечивается узкополосным спектральным фильтром, который может быть выполнен в виде интерференционного покрытия на поверхности линзы объектива ПрОС.
Поэтому в заявляемом устройстве обеспечивается высокая величина отношения сигнал/помеха, которая, являясь важнейшим параметром локационного устройства, определяет такие его характеристики, как дальность и точность обнаружения постороннего объекта. В располагаемых нами источниках информации не обнаружено технических решений, содержащих в совокупности признаки, сходные с отличительными признаками заявляемого устройства. Следовательно, изобретение соответствует критерию "изобретательский уровень".
Наличие новых существенных признаков совместно с известными и общими с прототипом устройства позволило создать новое техническое решение - устройство для осуществления способа лазерной локации (обнаружения постороннего объекта в заданной области пространства). Устройство решает комплексно, при обеспечении высокой помехоустойчивости, задачу поиска, идентификации и сопровождения высокоскоростных целей в широком диапазоне дальностей и телесных углов.
Краткое описание чертежей.
Предлагаемые способ лазерной локации и устройство для его реализации иллюстрируются чертежами:
На фиг.1 представлена фронтальная проекция БОП с пересекающимися полями зрения ПОС и ПрОС.
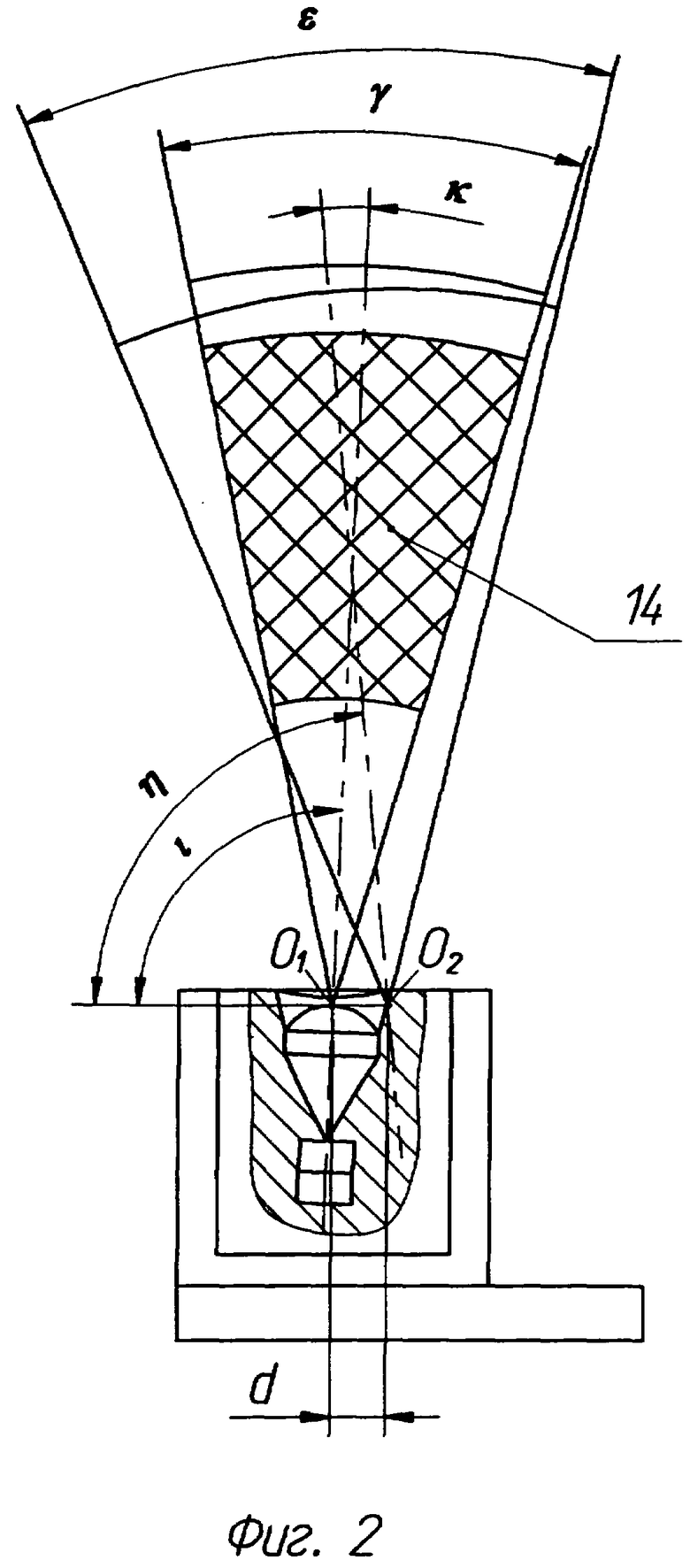
На фиг.2 представлена профильная проекция БОП с пересекающимися полями зрения ПОС и ПрОС.
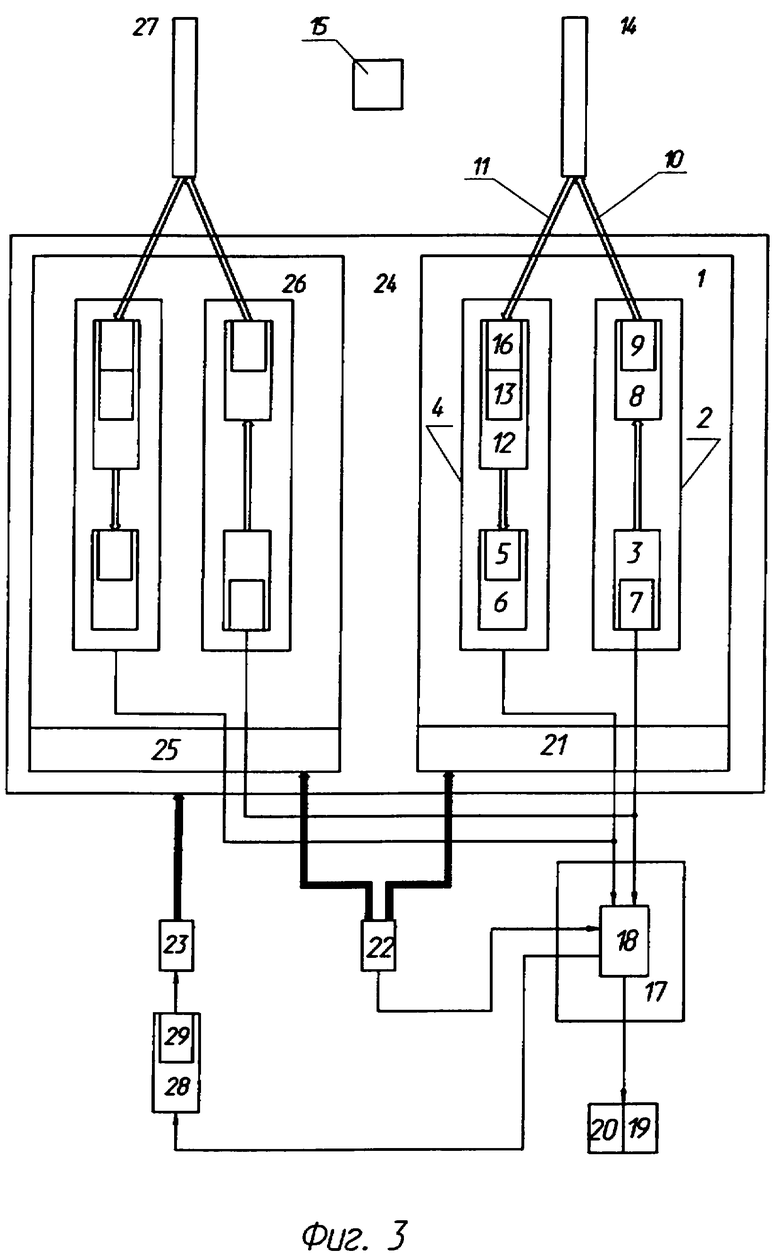
На фиг.3 изображена блок-схема лазерного локатора;
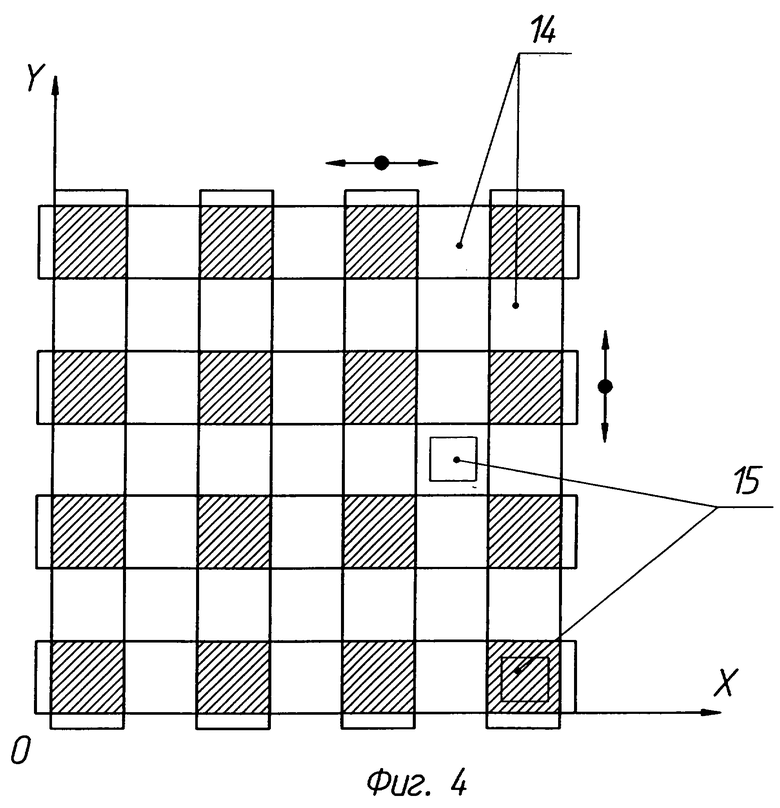
На фиг.4 изображено поперечное сечение зоны обзора пространства лазерного локатора с прямоугольным размещением зон чувствительности, входящих в него БОП;
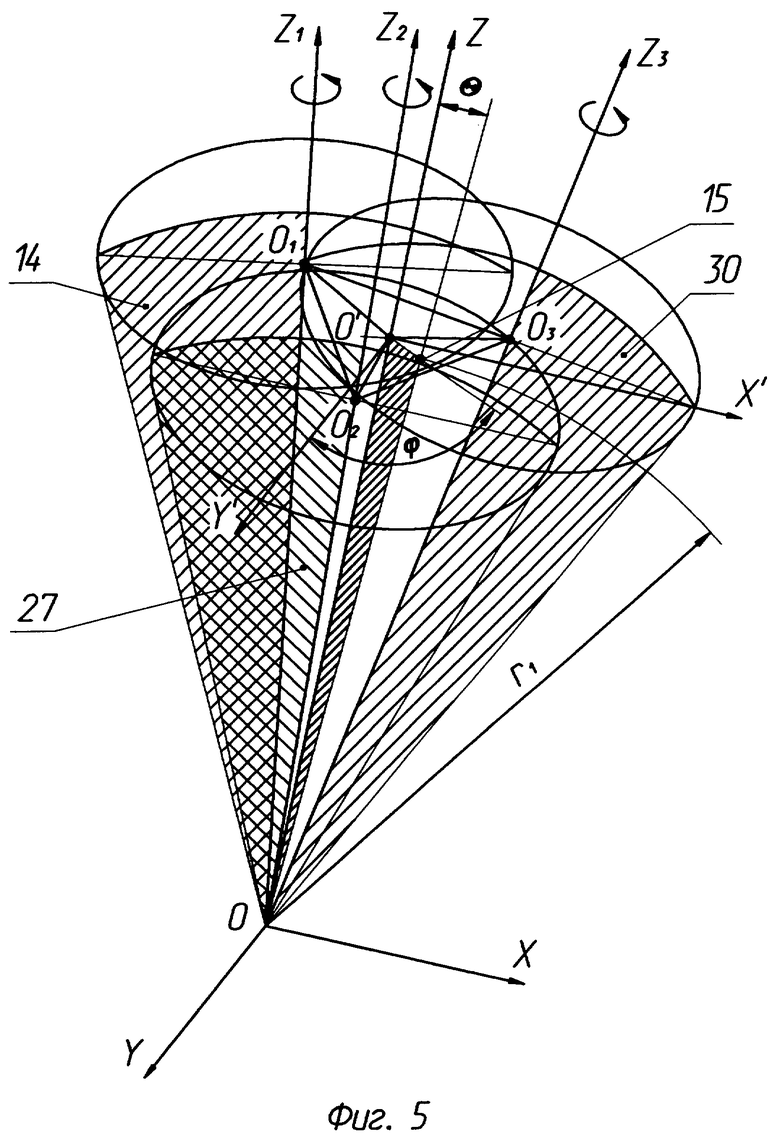
На фиг.5 изображена зона обзора пространства лазерного локатора со сферическим размещением зон чувствительности.
Варианты осуществления изобретения.
Как показано на фиг.1 и фиг.2, лазерный локатор содержит БОП 1, содержащий ПОС 2 с лазерным излучателем 3, и ПрОС 4 с ФЧЭ 5, входящим в состав ФПУ 6.
Количество БОП в лазерном локаторе может быть большим. Их количество, конфигурация зон чувствительности и их взаимное расположение определяют зону обзора пространства ЛЛ в целом.
Лазерный излучатель 3 содержит устройство 7 для внутренней модуляции и управления режимом генерации оптического излучения. На выходе ПОС 2 формируется луч света с заданными геометрическими, энергетическими, спектральными и временными характеристиками, который направляется в контролируемое пространство через объектив 8, содержащий цилиндрическую линзу 9, обеспечивающую развертку излучения в виде линии, перпендикулярной плоскости сечения ее наибольшей кривизны. Поле зрения 10 ПОС 2 образуется в виде четырехгранной пирамиды со сферической поверхностью в основании со сферическими координатами в виде функции f (r, β, γ), где r - радиус-вектор поля зрения ПОС, β - угол расходимости лазерного излучения в плоскости, перпендикулярной плоскости развертки, γ - угол расходимости лазерного излучения в плоскости развертки.
Аналогичным образом выполнена ПрОС 4, у которой поле зрения в виде четырехгранной пирамиды со сферической поверхностью в основании 11 образуется объективом 12 с цилиндрической линзой 13 со сферическими координатами в виде функции F (R, δ, ε). Здесь R - радиус-вектор поля зрения ПрОС, δ - угол расходимости лазерного излучения в плоскости, перпендикулярной плоскости развертки, ε - угол расходимости лазерного излучения в плоскости развертки.
Центры объективов ПОС 2 (точка O1) и ПрОС 4 (точка О2) расположены на расстоянии «с» один от другого, а их оптические оси расположены под углом α друг относительно друга. Цилиндрические линзы 9, 13, установлены таким образом, что секущие круговые секторы с большим углом при вершине, проходящие через оптическую ось объективов, расположены в одном направлении, образуя в месте пересечения разверток полей зрения веерообразную зону чувствительности 14 БОП 1.
На фиг.1 в плоскости, перпендикулярной плоскости развертки, размеры и конфигурация зоны чувствительности 14 и ее положение в пространстве определяется параметрами «с» и «α», полями зрения ПОС [функция f (r, β, γ], ПрОС [функция F (R, δ, ε)] и углами "ρ, χ" наклона их оптических осей к линии O1O2, во фронтальной проекции.
На фиг.2 в плоскости развертки зоны чувствительности 14 ее размеры и конфигурация определяются параметром «d» - профильная проекция расстояния между точками O1O2, углами "η, ι, κ", где
η - угол наклона на профильной проекции оси поля зрения ПрОС к линии O1O2;
ι - угол наклона на профильной проекции оси поля зрения ПОС к линии O1O2;
κ - угол пересечения на профильной проекции осей полей зрения ПОС и ПрОС.
В целом, зона чувствительности 14 одного БОП представляет собой веерообразный объем переменной толщины.
При соотношении углов (χ+δ/2>ρ-β/2), дальнее расстояние до зоны чувствительности (расстояние от точки В по нормали к линии O1O2) имеет ограничение, при соотношении углов (χ+δ/2<ρ-β/2) дальнее расстояние до зоны чувствительности не имеет ограничения, при этом размеры зоны чувствительности в направлении радиуса-вектора определяются энергетическими возможностями ЛЛ. Следует отметить, что при соотношении углов (χ+δ/2=ρ-β/2) зона чувствительности имеет одинаковый размер "а" практически на всей протяженности зоны чувствительности, что предпочтительно для ЛЛ.
Поля зрения ПОС 10 и ПрОС 11 ориентируют в пространстве таким образом, чтобы секущие круговые секторы с большим углом при вершине, проходящие через оптическую ось объективов, были расположены в одном направлении, образуя в месте пересечения разверток полей зрения веерообразную зону чувствительности (хорды указанных круговых секторов параллельны, либо скрещиваются).
На фиг.3 можно проследить, как срабатывает система при попадании в зону чувствительности 14 объекта обнаружения 15. При попадании объекта обнаружения 15 в зону чувствительности 14 БОП 1, отраженное от него лазерное излучение через объектив 12, содержащий селектор импульсов по частоте, выполненный в виде светофильтра 16 и цилиндрическую линзу 13, поступает в фоточувствительный элемент ФЧЭ 5, выполненный в виде фотодетектора, где формируется видеоимпульс сигнала, затем производится предварительное усиление видеосигнала в ФПУ 6 с преобразованием его в электрический сигнал.
Электрический сигнал от ФПУ 6 поступает в вычислительное устройство 17, содержащее устройство исчисления координат 18 объекта обнаружения 15, выполненное в виде процессора. Здесь полученный электрический сигнал обрабатывается с целью оценки параметров обнаружения и классификации объекта, результаты вычисления выдаются в индикатор распознавания объекта 19 и/или в исполнительное устройство 20.
БОП 1 установлен на панели 21 с возможностью его перемещения и управляется сканирующим устройством 22. Сервопривод 23 соединен с платформой 24, на которой размещены другие панели 25 с идентично установленными на них блоками обзора пространства 26.
Предлагаемый ЛЛ по сути является сканирующей следящей системой, в состав которой входят несколько БОП - 1, 26, и т.д., зоны чувствительности которых 14, 27, и т.д. составляют общую зону чувствительности локатора. При сканировании пространства генерируются опорные сигналы, соответствующие мгновенным положениям зоны чувствительности каждого БОП в поле обзора пространства ЛЛ. Процессор (на фиг.3 не показан), входящий в состав вычислительного устройства 17, идентифицирует сигнал от объекта 15 среди выходных сигналов приемника, как правило, с помощью пороговых устройств и делает выборку опорных сигналов на данный момент времени, определяя тем самым положение объекта 15.
Затем сигналы положения объекта 15 подаются в систему сопровождения 28 и используются в системе управления и наведения 29 для наведения зоны обзора пространства таким образом, чтобы объект 15 оказался в центре зоны обзора пространства ЛЛ. При этом наведение осуществляется сервоприводом 23, который приводит в движение платформу 24, с установленными на ней блоками обзора пространства 1, 26 и др.
Для обеспечения надежного обнаружения объекта обнаружения 15, при прохождении им зоны чувствительности 14, на последнюю накладываются дополнительные ограничения. Так, ее минимальный размер «а» (толщина) в направлении «λ-λ» (фиг.1), перпендикулярном плоскости развертки выбирается из соотношения:

где b - характерный размер объекта обнаружения 15;
Vоб - скорость объекта обнаружения 15 в направлении, перпендикулярном плоскости развертки зоны чувствительности;
Vск - скорость сканирования в направлении, перпендикулярном плоскости развертки зоны чувствительности;
n - количество импульсов излучения лазерного источника света в одном цикле зондирования;
v - тактовая частота излучающего лазерного источника света.
Таким образом, эффективные размеры зоны чувствительности 14 будут меньше, чем ее геометрические размеры, определяемые линией пересечения полей зрения ПОС 2 и ПрОС 4. Эффективная зона чувствительности БОП 1 на фиг.1 в сечении, перпендикулярном плоскости развертки, ограничена линией CDEFK. Из общей зоны чувствительности исключаются участки, ограниченные линями АСК и BDE, при прохождении которых объект может быть не обнаружен ввиду дефицита времени на прием и обработку отраженного сигнала.
Структурные схемы ЛЛ, алгоритмы обработки информации в оптикоэлектронных приборах и методы борьбы с помехами в настоящее время проработаны достаточно полно и широко известны (Малашин М.С., Каминский Р.П., Борисов Ю.Б. «Основы проектирования лазерных локационных систем». - М.: Высшая школа, 1983 г., с.5-25, 118-135.; Воробьев В.И. «Оптическая локация для радиоинженеров». - М.: Радио и связь, 1983 г., с.4-19, 142-158. Якушенков Ю.Г., Луканцев В.Н., Колосов М.П. Методы борьбы с помехами в оптико-электронных приборах. - М.: Радио и связь, 1981 г., с.5-172).
Заявляемые способ лазерной локации и устройство для его осуществления, в зависимости от алгоритма обработки информации в вычислительном устройстве 17, могут обнаруживать объект в контролируемой зоне без определения его координат. Это найдет применение в системах охранной сигнализации или в устройствах предупреждения столкновения транспортных средств. Кроме обнаружения, предлагаемое техническое решение способно определять координаты объекта и сопровождать его, что обеспечивает функции для следящей системы.
Выполнение обеих функций при обработке информации в вычислительном устройстве 17 предусматривает применение цифровых методов, которые характеризуются большой скоростью, точностью и надежностью. При этом обработка информации может производиться с помощью высокопроизводительных процессоров.
Представленная на фиг.1 зона чувствительности 14 обеспечивается одним БОП 1, при этом зона чувствительности 14 выполнена в виде веерообразного объема.
Указанная зона чувствительности 14, кроме фиксации факта обнаружения объекта 15, может обеспечить только определение одной координаты объекта 15 - расстояния. Создание объемного поля обзора пространства ЛЛ и определение полных координат объекта 15 может быть достигнуто увеличением количества БОП, каждый из которых имеет свою зону чувствительности, т.е. за счет заполнения контролируемого пространства нужным количеством отдельных зон чувствительности, а также сканированием пространства в направлении, перпендикулярном плоскости развертки зоны чувствительности одного БОП.
На фиг.4 показано поперечное сечение поля обзора пространства ЛЛ с прямоугольным размещением зон чувствительности 14 отдельных БОП. При этом БОП могут располагаться как стационарно, так и осуществлять сканирование пространства путем качания зон чувствительности 14 в направлении, перпендикулярном плоскости их развертки, как показано на фиг.4 с помощью двунаправленных стрелок. Мгновенные координаты объекта обнаружения 15 в осях X, Y определяются местом пересечения соответствующих зон чувствительности 14, обозначенных на фиг.4 заштрихованными квадратами. Координата по оси Z объекта обнаружения определяется дальностью до объекта обнаружения и мгновенными углами наклона соответствующих зон чувствительности к координатным плоскостям.
На фиг.5 показано поле обзора пространства ЛЛ со сферическим размещением зон чувствительности 14, 27, 30 отдельных БОП. При этом БОП могут располагаться как стационарно, так и осуществлять сканирование пространства путем вращения зон чувствительности 14, 27, 30 каждого БОП в направлении, перпендикулярном плоскости их развертки. При вращении зоны чувствительности одного БОП общая зона обзора образуется в виде конического объема. При этом можно обеспечить определение в сферической системе координат только двух координат - расстояния и долготы φ. Для определения третьей координаты - полярного угла θ требуется совмещение нескольких конических зон обзора. Мгновенные координаты объекта обнаружения 15 в направлении осей φ, θ также определяются местом пересечения зон чувствительности соответствующих БОП, при этом радиус-вектор r1 определяется автоматически как расстояние до объекта обнаружения 15.
С целью исключения взаимовлияния БОП, т.е. чтобы излучение одного БОП не вызывало срабатывание смежного БОП, их лазерные излучатели могут быть выполнены на различных частотах, например длина волны может быть выбрана из ряда λ=0,85; 1,05; 1,3; 1,55 мкм, и/или их импульсы могут быть разнесены во времени, а лазерные излучатели синхронизированы.
Предлагаемый ЛЛ по сути является сканирующей следящей системой, в состав которой входят несколько БОП, мгновенные зоны чувствительности которых составляют часть общего поля обзора пространства системы.
Промышленная применимость
Указанные способ лазерной локации и устройство для его осуществления имеют практическую реализацию в системе для обнаружения объектов и определения их координат в контролируемой зоне. Из приведенных вариантов выполнения способа и устройства вытекает реальность их применения в промышленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА | 2012 |
|
RU2516376C2 |
| УСТРОЙСТВО ФОКУСИРОВКИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2021 |
|
RU2781765C1 |
| УСТРОЙСТВО ЛОКАЦИИ ПРОСТРАНСТВА С ДВОЙНОЙ ЗОНОЙ ЧУВСТВИТЕЛЬНОСТИ | 2020 |
|
RU2729948C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2017 |
|
RU2672528C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ДЛЯ ФОКУСИРОВКИ ИЗЛУЧЕНИЯ | 2017 |
|
RU2650705C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПРОСТРАНСТВОМ НА ФОНЕ ЯРКОГО УДАЛЕННОГО ИСТОЧНИКА СВЕТА | 2007 |
|
RU2356066C2 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ И ПАНОРАМНАЯ АППАРАТУРА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2420774C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2013 |
|
RU2535631C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2008 |
|
RU2383901C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
Изобретение относится к измерительной технике, а именно к лазерной локации, и может быть использовано в системах обнаружения и распознавания целей, в системах предупреждения столкновения транспортных средств, в навигационных устройствах и в системах охранной сигнализации. Согласно изобретению, создают зону чувствительности пересекающимися полями зрения передающей и принимающей оптическими системами. Системы имеют вид четырехгранных пирамид со сферическими поверхностями в нижнем основании, с вершинами в центрах объективов, с боковыми гранями в виде секторов круга. Улавливают отраженный сигнал от постороннего объекта и судят о местонахождении объекта по отраженному сигналу и ориентации зоны чувствительности. В устройстве использован лазерный импульсный источник светового излучения. В объективах систем установлены цилиндрические линзы, у которых плоскости сечения наибольшей кривизны параллельны друг другу. Технический результат - увеличение зоны чувствительности пространственной разрешающей способности устройства и уменьшение интенсивности фоновых сигналов. 2 н. и 11 з.п. ф-лы, 5 ил.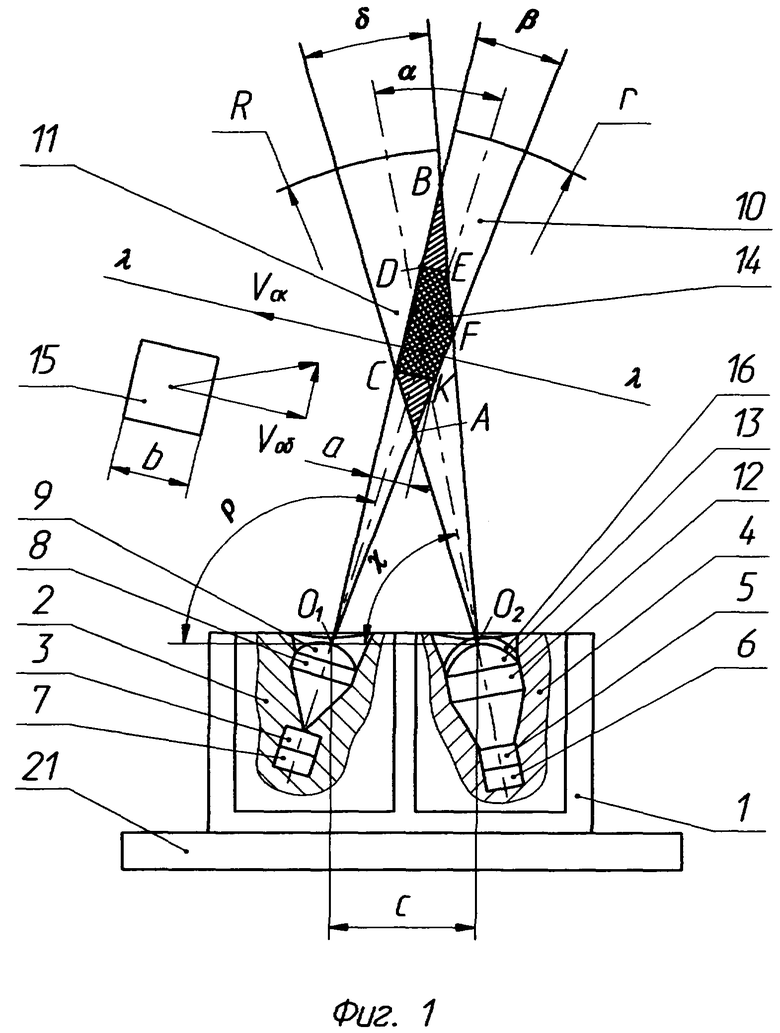
1. Способ лазерного обнаружения постороннего объекта в заданной области пространства, включающий создание зоны чувствительности пересекающимися полями зрения передающей оптической системы и принимающей оптической системы, улавливание отраженного сигнала от постороннего объекта при попадании его в зону чувствительности, суждение о местонахождении постороннего объекта по отраженному сигналу и ориентации зоны чувствительности, отличающийся тем, что создание зоны чувствительности осуществляют пересечением разверток полей зрения передающей и принимающей оптических систем, представленных в виде четырехгранных пирамид со сферической поверхностью в основании и боковыми гранями в виде секторов круга.
2. Способ по п.1, отличающийся тем, что при образовании зоны чувствительности секущие круговые секторы разверток полей зрения принимающей и передающей оптических систем с большим углом при вершине, проходящие через оптическую ось объективов принимающей и передающей оптических систем, располагают в одном направлении, вдоль которого ориентирована плоскость развертки зоны чувствительности.
3. Способ по п.1, отличающийся тем, что производят сканирование, вращая зону чувствительности вокруг выбранной оси.
4. Способ по п.1, отличающийся тем, что производят сканирование пространства зоной чувствительности в направлении, перпендикулярном плоскости развертки зоны чувствительности.
5. Способ по п.2, отличающийся тем, что размер зоны чувствительности в направлении, перпендикулярном плоскости развертки зоны чувствительности, определяют из соотношения:
а>(Vоб+Vск)×n/v-b,
где а - размер зоны чувствительности;
b - характерный размер объекта обнаружения;
Vоб - скорость объекта в направлении, перпендикулярном плоскости развертки зоны чувствительности;
Vск - скорость сканирования пространства зоной чувствительности, в направлении, перпендикулярном плоскости развертки зоны чувствительности;
n - количество импульсов излучения в лазерного источника света в одном цикле зондирования;
v - тактовая частота излучающего лазерного источника света.
6. Способ по п.1, отличающийся тем, что создают пересекающиеся в пространстве зоны чувствительности, заполняющие собой заданную область пространства.
7. Способ по любому из пп.1-6, отличающийся тем, что ориентируют между собой получающиеся зоны чувствительности таким образом, чтобы сигнал о присутствии постороннего объекта при попадании его в пересекающиеся зоны чувствительности давал информацию о его мгновенных координатах.
8. Устройство для лазерного обнаружения постороннего объекта в заданной области пространства, содержащее вычислительное устройство, выход которого соединен с индикатором распознавания объекта, передающую и приемную оптические системы с пересекающимися полями зрения, образующие зону чувствительности, снабженные объективами, в фокальной плоскости которых размещены источник светового излучения и фотоприемное устройство, отличающееся тем, что источник светового излучения выполнен лазерным и импульсным, а в объективах передающей и принимающей оптических систем установлены цилиндрические линзы, причем цилиндрические линзы сориентированы относительно друг друга таким образом, что их плоскости сечения наибольшей кривизны параллельны друг другу.
9. Устройство по п.8, отличающееся тем, что импульсный лазерный источник светового излучения передающей оптической системы размещен в фокальной плоскости объектива таким образом, что длинная сторона прямоугольника его светящегося пятна расположена перпендикулярно плоскости сечения наибольшей кривизны цилиндрической линзы.
10. Устройство по п.8, отличающееся тем, что передающая и приемная оптические системы смонтированы в блок обзора пространства с возможностью изменения их взаимного расположения при юстировке.
11. Устройство по п.10, отличающееся тем, что блоки обзора пространства установлены на одной панели с возможностью изменения их пространственной ориентации относительно панели.
12. Устройство по п.11, отличающееся тем, что панель установлена на опорной поверхности с возможностью изменения своей пространственной ориентации относительно этой поверхности.
13. Устройство по любому из пп.10-12, отличающееся тем, что оно снабжено приводом для изменения пространственной ориентации блоков обзора пространства относительно друг друга и всей панели относительно опорной поверхности.
| Измеритель малых расстояний | 1973 |
|
SU491029A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2002 |
|
RU2223515C1 |
| Сканирующее устройство | 1988 |
|
SU1628041A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

