Изобретение относится к устройствам пассивной оптической локации, а более конкретно, к аппаратуре, регистрирующей оптическое изображение и выделяющей на нем интересующие объекты.
Появление современных быстродействующих регистраторов изображения, например цифровых видеокамер и фотоаппаратов, обусловило широкое применение их в системах машинного зрения для целей мониторинга и охраны самых различных объектов, как промышленного, так и социального назначения.
В частности, известна система видеомониторинга и охраны по патенту США №7310111 от 10.10.2002, МПК H04N 07/18, содержащая несколько видеовходов, каждый из которых настроен для приема электронного видеосигнала от отдельно установленной видеокамеры, по крайней мере, один процессор, операционно соединенный с видеовходами и настроенный для обработки цифрового изображения электронных видеосигналов нескольких видеовходов. Система соединена с сетью Internet, операционно подключенной, по крайней мере, к одному процессору. Компьютер (процессор) детектирует движение объектов на электронных видеосигналах, генерирует сжатое изображение, включающее движение объекта, автоматически передает сжатое изображение в сеть Internet как часть электронного сообщения (E-mail) и одновременно передает отдельное сообщение о тревоге. Данное устройство имеет ряд недостатков:
- невозможно объективное проведение селекции объектов по дальности, так как оценка удаленности объектов проводится исходя из размеров их образов на регистрируемых изображениях и их ожидаемых, заранее неизвестных, реальных размеров;
- технологическая сложность конструкции, так как при наличии значительного количества отдельно смонтированных видеокамер (для обеспечения большого угла обзора) необходимы отдельные монтажные кронштейны, защитные кожухи, разводка электропитания;
- трудность настройки углов обзора видеокамер, так как данную операцию приходится производить для каждой камеры в отдельности.
Известно устройство для наблюдения за пространством в виде панорамной IP камеры AV8360 фирмы Arecont Vision, состоящей из нескольких регистрирующих видеоканалов, интегрированных в единый корпус с купольным прозрачным окном [www.arecontvision.ru]. Видеоканалы внутри корпуса ориентированы таким образом, чтобы получать панорамное изображение. Камера снабжена электронной платой, формирующей и передающей видеосигнал по линиям связи, например Internet, а также осуществляющей возможность удаленного доступа. В камеру встроена также электронная плата, позволяющая проводить селекцию движущихся объектов.
Недостаток данного устройства заключается в том, что оно не обеспечивает достоверного распознавания объектов на изменяющемся фоне и не дает информации об удаленности подозрительно объекта, обладающего заранее неизвестными реальными размерами.
Известно устройство по патенту США №7321386 от 31.07.2003, МПК H04N 05/225, состоящее из нескольких отдельных панорамных вращающихся камер, каждая из которых снабжена вариофокальным объективом, и аппаратуры для получения электронных видеосигналов с камер и для процессорной обработки полученной информации. Устройство позволяет селектировать движущиеся объекты, а также проводить селекцию объектов по дальности за счет формирования стереоскопического изображения при помощи двух отдельных разнесенных камер, вращение которых остановлено на время регистрации кадров.
Данное устройство имеет ряд недостатков:
- существует вероятность утраты полезной информации, так как одномоментно наблюдается только часть пространства, ограниченная углами обзора вариофокальных объективов панорамных вращающихся видеокамер, при этом остальная часть пространства не контролируется;
- недостаточное быстродействие для селекции быстродвижущихся объектов, обусловленное трудностью управления работой системы, так как необходимо поворачивать камеры вслед за перемещающимся объектом;
- наличие механических узлов вращения камеры снижает надежность работы устройства в целом.
В качестве прототипа выбрано устройство по патенту РФ №2081435 от 02.04.84, МПК G01S 17/00, содержащее два оптических регистратора изображения, зафиксированные на заданном расстоянии относительно друг друга, главные оптические оси объективов которых параллельны друг другу и обращены к контролируемому участку пространства для формирования стереоскопического изображения из двух одновременно регистрируемых изображений, а также аппаратуру для анализа стереоскопического изображения. В известном устройстве регистраторы изображения разнесены относительно друг друга по горизонтали.
Наличие стереоскопического изображения контролируемого участка пространства дает не только достоверную информацию о появлении подозрительного объекта на изменяющемся фоне, но и позволяет оценить его размеры и расстояние до него при соответствующем алгоритме обработки стереоскопического изображения.
Основной недостаток прототипа заключается в низкой обзорности, т.к. угол обзора устройства не превосходит угла обзора отдельного регистратора, оставляя остальное пространство без наблюдения. При необходимости создать широкий стереообзор можно увеличить количество пар оптических регистраторов. Но при этом возникает технологическая сложность монтажа и обеспечения единого стереоскопического базиса для всех пар оптических регистраторов, а также необходимость индивидуальной защиты каждого регистратора от погодных условий.
Задачей настоящего изобретения является создание компактного устройства для наблюдения за пространством в достаточно широком (вплоть до панорамного) угле обзора, технологичного в монтаже и удобного в эксплуатации.
Поставленная задача решается следующим образом.
Устройство для обнаружения объектов в окружающем пространстве, содержащее не менее двух зафиксированных на заданном расстоянии друг относительно друга оптических регистраторов изображения, главные оптические оси объективов которых параллельны друг другу и обращены к контролируемому участку пространства для формирования стереоскопического изображения из двух одновременно регистрируемых изображений, а также аппаратуру для анализа стереоскопических изображений, согласно изобретению снабжено дополнительными идентичными оптическими регистраторами изображений. Первая половина всех оптических регистраторов изображений закреплена по периметру первой платформы, а вторая половина оптических регистраторов изображений закреплена по периметру второй платформы, зафиксированной со смещением по вертикали относительно первой платформы. Каждому из оптических регистраторов, закрепленных на первой платформе, соответствует оптический регистратор, закрепленный на второй платформе, для формирования стереоскопического изображения своего участка контролируемого пространства. Вся сборка оптических регистраторов и аппаратура для анализа стереоскопических изображений размещена в едином защитном корпусе, выполненном с обеспечением прохождения света к объективам оптических регистраторов изображения и с обеспечением вывода линий связи за пределы корпуса для соединения указанной аппаратуры с каналом передачи данных и блоком управления.
Технический результат обеспечивается:
- компактностью размещения нескольких пар оптических регистраторов изображения, каждая из которых формирует стереоскопическое изображение за счет смещения регистраторов в каждой паре по вертикали, жесткой их фиксации относительно друг друга и зоны наблюдения;
- возможности использования единого защитного корпуса сразу для всех уязвимых к погодным условиям узлам устройства;
- удобством монтажа такой сборки на любом отведенном в зависимости от задачи месте, например на столбовой опоре;
- удобством формирования канала связи с внешними устройствами.
В качестве оптических регистраторов изображения могут быть использованы цифровые видеокамеры.
Кроме того, платформы для размещения оптических регистраторов имеют преимущественно круглую форму, а оптические регистраторы размещены равномерно по периметру каждой платформы с обеспечением кругового обзора. При этом достигается панорамный обзор и анализ ситуации в любом направлении. (Тем не менее, не исключена и другая форма платформ, например полукруглая, если часть пространства надежно защищена от появления подозрительных объектов, например, стеной).
Кроме того, платформы, имеющие преимущественно круглую форму, зафиксированы относительно друг друга с помощью центральной полой стойки.
Кроме того, в защитном кожухе размещен, по меньшей мере, один вентилятор для принудительной конвекции воздуха.
Для экономии внутреннего пространства вентилятор может быть размещен внутри полой стойки, боковая поверхность которой выполнена с отверстиями для конвекции воздуха.
Кроме того, в защитном корпусе размещен электротермический элемент для нагрева или охлаждения воздуха.
Вентилятор и электротермический элемент предназначены для создания оптимального микроклимата внутри устройства.
Кроме того, в центральной части полой стойки между платформами с оптическими регистраторами смонтированы полки для размещения аппаратуры управления микроклиматом внутри камеры, аппаратуры для анализа стереоскопических изображений и термодатчиков. Этим достигается компактное размещение электронных плат внутри корпуса.
Кроме того, полки и платформы закреплены на полой стойке при помощи винтов и наборных элементов, жестко фиксируемых друг относительно друга. За счет этого, при необходимости, можно производить подстройку стереоскопического базиса (расстояния между платформами) в зависимости от заданной дистанции обзора при помощи установки других наборных элементов с измененной длиной.
Кроме того, боковая поверхность защитного корпуса может быть выполнена с окнами для объективов оптических регистраторов изображения.
В другом варианте боковая поверхность защитного корпуса выполнена полностью светопрозрачной.
В этом варианте боковая поверхность защитного корпуса может быть выполнена двухстенной с воздушным зазором между стенками. Этим обеспечивается дополнительная защита микроклимата внутреннего объема защитного корпуса.
Кроме того, верхний фланец защитного корпуса выполнен куполообразным. Этим обеспечивается защита устройства от оседания осадков в виде дождя и снега.
Кроме того, на наружной поверхности донной части защитного корпуса выполнен крепежный элемент для закрепления устройства на столбовой опоре.
Кроме того, на наружной поверхности донной части защитного корпуса выполнен электрический разъем.
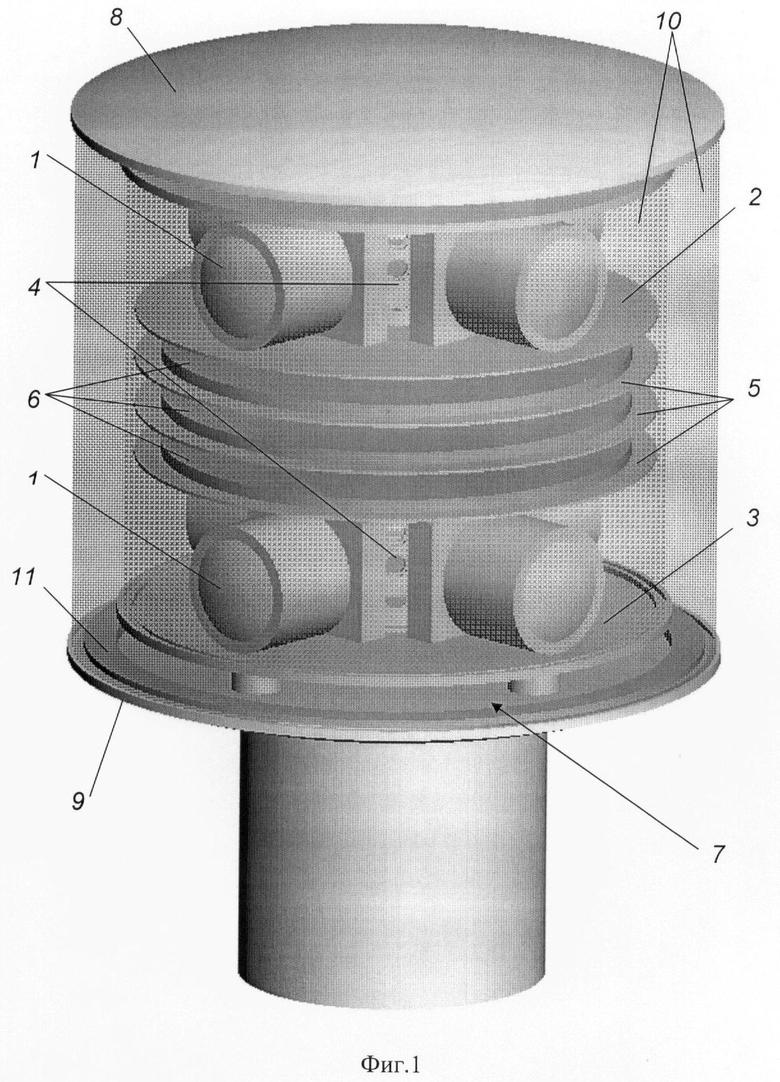
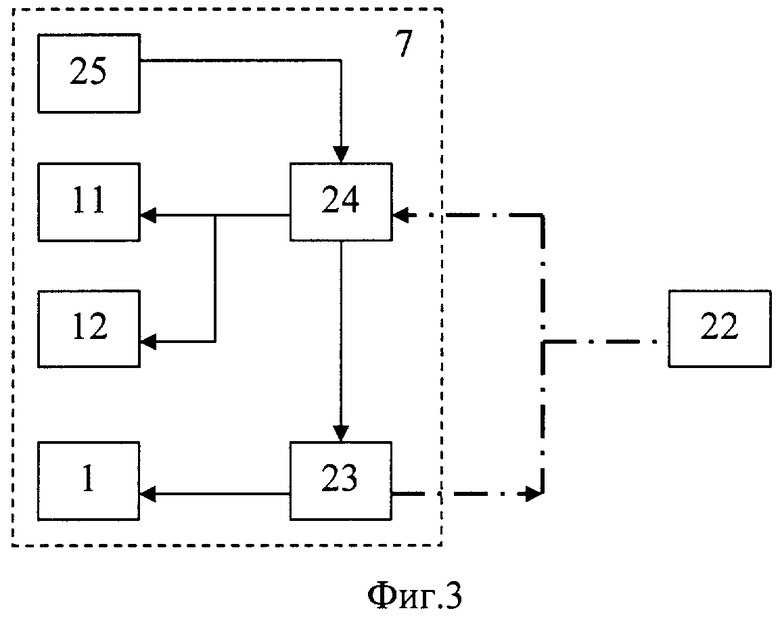
На фиг.1 приведен общий вид заявляемого устройства в изометрии, на фиг.2 - устройство в разрезе, на фиг.3 - принципиальная схема электрических соединений компонентов устройства.
На фиг.1 изображены цифровые видеокамеры 1, половина которых размещена на первой (верхней) платформе 2, а вторая половина - на второй (нижней) платформе 3. Количество видеокамер 1 зависит от требуемого качества (разрешения) получаемого изображения, а также определяется из условия сплошности области контроля окружающего пространства. Устройство имеет центральную полую стойку 4 с полками 5, на которых размещены платы 6 аппаратуры. Вся сборка помещена в корпус 7, состоящий из верхнего куполообразного фланца 8, нижнего фланца 9 и боковой двухстенной светопрозрачной поверхности 10. На нижней внутренней поверхности корпуса 7 размещен электротермический элемент 11.
На фиг.2 показана платформа 3 на четырех цилиндрических ножках 12, жестко закрепленная относительно нижнего фланца 9 винтами 13. Вентиляторы 14 для конвекции воздуха в корпусе 7 размещены в верхней и нижней части полой стойки 4. Полая стойка 4 для конвекции воздуха имеет ряд сквозных отверстий 15, которые также проходят через наборные элементы 16 - втулки, надеваемые на стойку 4, которые при необходимости можно заменить на другие с измененной длиной с целью подстройки стереоскопического базиса (расстояния между платформами).
Внутренняя полость стойки 4 с отверстиями 15 используется также для прокладки соединительных жгутов между видеокамерами 1 и платами 6. В нижней части корпуса выполнен выходной разъем 17 и элемент крепления 18 к полой столбовой опоре 19. Светопрозрачная боковая поверхность 10 образована стенками 20 и 21, между которыми имеется воздушный зазор. Стенки 20 и 21 могут быть изготовлены из полиметилметакрилата (органического стекла) или поликарбоната.
На фиг.3 показано принципиальное электрическое соединение устройства с блоком управления 22 посредством канала передачи данных (штрихпунктирная линия). Также на фигуре показаны принципиальные электрические соединения компонентов устройства, находящихся внутри корпуса 7 на полках 5. Аппаратура 23 анализа стереоскопических изображений соединена с каналом передачи данных, аппаратурой 24 управления вентилятором 12 и электротермическим элементом 11, а также с видеокамерами 1. Аппаратура 24 соединена с термодатчиками 25, а также с вентиляторами 14 и электротермическим элементом 11.
Работа устройства осуществляется по следующему алгоритму.
1. Блок управления 22 по команде оператора формирует сигнал для включения устройства. Сигнал передается по каналу передачи данных на аппаратуру 24 управления вентилятором 14 и электротермическим элементом 11.
2. Аппаратура 24, при получении сигнала о включении устройства, начинает постоянно опрашивать термодатчики 25 и анализировать полученную с них информацию о температуре внутри корпуса 7 устройства.
В случае нахождения температуры вне рабочего диапазона аппаратурой 24 формируется управляющий сигнал, подаваемый на электротермический элемент 11 и вентиляторы 14 до момента установления рабочего температурного диапазона. Электротермический элемент 11 и вентиляторы 14, получив управляющий сигнал, начинают свою работу. При пониженной температуре внутри корпуса устройства элемент 11 работает на тепловыделение, при повышенной температуре - на теплопоглощение.
В первоначальный момент достижения температурного рабочего диапазона, после получения сигнала о начале работы устройства, аппаратурой 24 формируется и передается на аппаратуру 23 (анализа стереоскопических изображений) сигнал для ее включения.
3. Аппаратура 23 при получении сигнала о ее включении формирует и передает на видеокамеры 1 сигнал для начала регистрации стереоскопических изображений.
Видеокамеры 1, получив сигнал о начале регистрации, начинают синхронно с заданным интервалом по времени формировать и регистрировать цифровые видеоизображения, одновременно преобразовывать их в видеопоток и передавать на аппаратуру 23.
Аппаратура 23, получив переданный видеопоток с видеокамер 1, проводит его математическую обработку по заложенному в нее алгоритму, преобразует результаты математической обработки видеопотока в информационный поток и передает его по каналу передачи данных на блок управления 22.
Устройство выполнено на базе электронных устройств и компонентов, освоенных промышленностью развитых стран. Разработаны также варианты алгоритмов, которые могут быть использованы при обработке регистрируемых с помощью заявляемого устройства изображений. Часть алгоритмов была оформлена заявками на изобретения, поданными ранее, часть алгоритмов рассматривается в качестве «ноу-хау».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ И ПАНОРАМНАЯ АППАРАТУРА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2420774C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2013 |
|
RU2535631C2 |
| СПОСОБ И УСТРОЙСТВО КЛИМАТИЧЕСКОЙ ЗАЩИТЫ РЕГИСТРИРУЮЩЕЙ ВИДЕОАППАРАТУРЫ | 2008 |
|
RU2360379C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОД ВОДОЙ | 2009 |
|
RU2424542C2 |
| УСТРОЙСТВО ДЛЯ СЕЛЕКЦИИ ОБЪЕКТОВ НА НЕОДНОРОДНОМ УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2390039C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЁННОМ ФОНЕ | 2013 |
|
RU2552123C2 |
| АППАРАТУРА ДЛЯ НАБЛЮДЕНИЯ ЗА ПРОСТРАНСТВОМ НА ФОНЕ ЯРКОГО УДАЛЕННОГО ИСТОЧНИКА СВЕТА | 2008 |
|
RU2366974C1 |
| СИСТЕМА ДЛЯ ВЕДЕНИЯ ПРИЦЕЛЬНОГО ОГНЯ ИЗ УКРЫТИЯ | 2008 |
|
RU2403526C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2363018C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПРОСТРАНСТВОМ НА ФОНЕ ЯРКОГО УДАЛЕННОГО ИСТОЧНИКА СВЕТА | 2007 |
|
RU2356066C2 |
Изобретение относится к устройствам пассивной оптической локации, а именно к аппаратуре, регистрирующей оптическое изображение и выделяющей на нем интересующие объекты. Устройство содержит четное число оптических регистраторов изображения (большее двух), половина из которых закреплена по периметру первой платформы, а вторая половина - по периметру второй платформы, смещенной по вертикали относительно первой платформы. При этом вся сборка оптических регистраторов изображения и аппаратура для анализа стереоскопических изображений размещены в едином защитном корпусе. Также в корпусе размещены вентиляторы, электротермический элемент и термодатчики для обеспечения микроклимата во внутреннем объеме. Заявленное техническое решение направлено на создание компактного устройства для наблюдения за пространством в достаточно широком (вплоть до панорамного) угле обзора, технологичного в монтаже и удобного в эксплуатации. 14 з.п. ф-лы, 3 ил.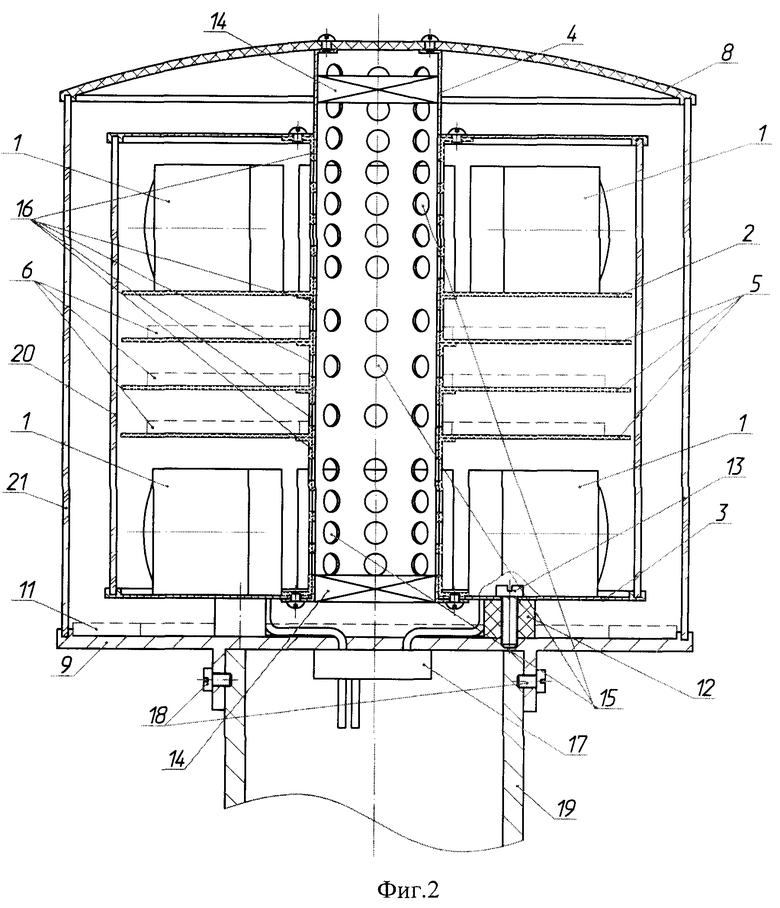
1. Устройство для обнаружения объектов в окружающем пространстве, содержащее не менее двух зафиксированных на заданном расстоянии относительно друг друга оптических регистраторов изображения, главные оптические оси объективов которых параллельны друг другу и обращены к контролируемому участку пространства, для формирования стереоскопического изображения из двух одновременно регистрируемых изображений, а также аппаратуру для анализа стереоскопических изображений, отличающееся тем, что устройство снабжено дополнительными идентичными оптическими регистраторами изображений, при этом первая половина всех оптических регистраторов изображений закреплена по периметру первой платформы, а вторая половина оптических регистраторов изображений закреплена по периметру второй платформы, зафиксированной со смещением по вертикали относительно первой платформы, причем каждому из оптических регистраторов, закрепленных на первой платформе, соответствует оптический регистратор, закрепленный на второй платформе, для формирования стереоскопического изображения своего участка контролируемого пространства, вся сборка оптических регистраторов и аппаратура для анализа стереоскопических изображений размещена в едином защитном корпусе, выполненном с обеспечением прохождения света к объективам оптических регистраторов изображения, и с обеспечением вывода линий связи за пределы корпуса для соединения указанной аппаратуры с каналом передачи данных и блоком управления.
2. Устройство для обнаружения объектов в окружающем пространстве по п.1, отличающееся тем, что в качестве оптических регистраторов изображения использованы цифровые видеокамеры.
3. Устройство для обнаружения объектов в окружающем пространстве по п.1, отличающееся тем, что платформы для размещения оптических регистраторов имеют преимущественно круглую форму, а оптические регистраторы размещены равномерно по периметру каждой платформы с обеспечением кругового обзора.
4. Устройство для обнаружения объектов в окружающем пространстве по п.3, отличающееся тем, что платформы с оптическими регистраторами зафиксированы относительно друг друга с помощью центральной полой стойки.
5. Устройство для обнаружения объектов в окружающем пространстве по п.4, отличающееся тем, что в защитном кожухе размещен, по меньшей мере, один вентилятор для принудительной конвекции воздуха и термодатчик.
6. Устройство для обнаружения объектов в окружающем пространстве по п.5, отличающееся тем, что вентилятор размещен внутри полой стойки, боковая поверхность которой выполнена с отверстиями для конвекции воздуха.
7. Устройство для обнаружения объектов в окружающем пространстве по п.6, отличающееся тем, что в защитном корпусе размещен электротермический элемент для нагрева или охлаждения воздуха.
8. Устройство для обнаружения объектов в окружающем пространстве по п.7, отличающееся тем, что в центральной части полой стойки между платформами с оптическими регистраторами изображения смонтированы полки для размещения термодатчиков, аппаратуры управления вентилятором и электротермическим элементом, аппаратуры для анализа стереоскопических изображений.
9. Устройство для обнаружения объектов в окружающем пространстве по п.8, отличающееся тем, что полки и платформы закреплены на полой стойке при помощи винтов и наборных элементов, жестко фиксируемых относительно друг друга.
10. Устройство для обнаружения объектов в окружающем пространстве по п.1, отличающееся тем, что боковая поверхность защитного корпуса выполнена с окнами для объективов оптических регистраторов изображения.
11. Устройство для обнаружения объектов в окружающем пространстве по п.1, отличающееся тем, что боковая поверхность защитного корпуса выполнена полностью светопрозрачной.
12. Устройство для обнаружения объектов в окружающем пространстве по п.11, отличающееся тем, что боковая поверхность защитного корпуса выполнена двухстенной с воздушным зазором между стенками.
13. Устройство для обнаружения объектов в окружающем пространстве по любому из пп.10, 11 или 12, отличающееся тем, что верхняя поверхность защитного корпуса имеет преимущественно куполообразную форму.
14. Устройство по любому из пп.10, 11 или 12, отличающееся тем, что на наружной поверхности защитного корпуса выполнен крепежный элемент для закрепления устройства на столбовой опоре.
15. Устройство для обнаружения объектов в окружающем пространстве по любому из пп.10, 11 или 12, отличающееся тем, что на наружной поверхности донной части защитного корпуса выполнен электрический разъем.
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ | 1984 |
|
RU2081435C1 |
| US 7321386 В2, 22.01.2008 | |||
| US 5963664 А, 05.10.1999 | |||
| US 6353678 B1, 05.03.2002 | |||
| US 6396961 B1, 28.05.2002. | |||

