Настоящее изобретение относится к способу и программному обеспечению для позиционирования бурильного агрегата в буровой установке в начальной точке скважины, которую предстоит пробурить, для начала бурения. Изобретение также относится к буровой установке, в которой положение бурильного агрегата регулируется путем перемещения буровой стрелы к начальной точке скважины.
Объект настоящего изобретения более точно определен во вводных частях независимых пунктов формулы изобретения.
Порода, как правило, извлекается согласно заданному плану. Для требуемой выемки породы при использовании взрывчатых веществ скважины пробуриваются для каждого излома в соответствии с предварительно составленным планом бурения. Когда позиционирование бурильного агрегата осуществляется вручную, оператор регулирует положение бурильного агрегата так, чтобы он точно располагался в положении пробуриваемой скважины, указанном на плане бурения, и выравнивает бурильный агрегат в соответствии с планом бурения. Однако точное позиционирование бурильного агрегата в начальной точке представляет собой медленный и сложный процесс.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание нового и усовершенствованного способа и программного обеспечения для позиционирования бурильного агрегата в скважине, которую предстоит пробурить следующей. Другой целью изобретения является создание новой и усовершенствованной буровой установки, оборудованной системой для позиционирования бурильного агрегата в следующей пробуриваемой скважине.
Способ в соответствии с изобретением отличается осуществлением перемещения бурильного агрегата вручную к следующей пробуриваемой скважине и после перемещения вручную осуществлением автоматического позиционирования, при котором бурильный агрегат перемещается под управлением блока управления к месту начальной точки скважины для начала бурения.
Программное обеспечение в соответствии с изобретением отличается тем, что исполнение данного программного обеспечения в бурильном агрегате определяет в блоке управления положение бурильного агрегата относительно по меньшей мере нескольких начальных точек скважин в соответствии с планом бурения для перемещения бурильного агрегата, выполняемого оператором вручную, по направлению к следующей пробуриваемой скважине и для осуществления после этого перемещения вручную автоматического позиционирования к начальной точке следующей пробуриваемой скважины для начала бурения.
Буровая установка в соответствии с изобретением отличается тем, что блок управления предназначен для определения положения бурильного агрегата относительно по меньшей мере нескольких начальных точек скважин в соответствии с планом бурения, бурильный агрегат способен сначала перемещаться вручную к следующей скважине, которую предстоит пробурить, и блок управления после перемещения вручную осуществляет автоматическое позиционирование к начальной точке следующей скважины для начала бурения.
Идея настоящего изобретения заключается в том, что оператор вручную осуществляет перемещение бурильного агрегата к пробуриваемой скважине в соответствии с планом бурения. В ходе перемещения вручную оператор вручную направляет бурильный агрегат к следующей скважине. В течение последнего этапа позиционирования бурильный агрегат под управлением блока управления автоматически располагается в месте начальной точки выбранной скважины. После позиционирования бурильный агрегат располагается так, что бурение в соответствии с планом бурения может быть начато.
Преимущество настоящего изобретения заключается в том, что точное позиционирование бурильного агрегата, которое является медленным и сложным процессом, осуществляется блоком управления, при этом оператор может в ходе так называемого точного позиционирования, например, приготовиться к бурению следующих скважин или наблюдать за работой других возможных бурильных агрегатов и устройств, входящих в состав бурильной установки. Конечная точность позиционирования не зависит от навыков оператора. Изобретение позволяет оператору независимо выбирать скважину, которую предстоит пробурить следующей согласно плану бурения, и позволяет применить функцию автоматического позиционирования для скважины в ходе позиционирования для облегчения работы оператора.
Идея воплощения изобретения заключается в том, что блок управления определяет скважину, которую предстоит пробурить следующей, на основе перемещения вручную.
Идея другого воплощения изобретения заключается в том, что бурильный агрегат вручную перемещается к начальной точке скважины в соответствии с планом бурения. В то же время блок управления следит за перемещением вручную и определяет, осуществляется ли перемещение вручную в направлении начальной точки скважины в соответствии с планом бурения. Блок управления в таком случае определяет скважину, к которой бурильный агрегат перемещается, как следующую скважину, которую следует пробурить. Блок управления может предложить тем или иным путем выполнить автоматическое позиционирование для данной скважины.
Идея одного воплощения изобретения заключается в том, что при перемещении вручную бурильного агрегата к начальной точке скважины согласно плану бурения расстояния измеряются для по меньшей мере некоторых из скважин в соответствии с планом бурения. Блок управления способен осуществлять автоматическое позиционирование в начальной точке буровой скважины, которая является ближайшей к бурильному агрегату после перемещения вручную. Тогда оператор может посредством простого и быстрого перемещения вручную переместить бурильный агрегат к начальной точке следующей скважины и после этого предоставить блоку управления выполнение точного позиционирования, представляющего собой медленный и сложный процесс.
Идея еще одного воплощения изобретения заключается в том, что блок управления указывает оператору на обнаруженную начальную точку скважины, которую следует пробурить, на основе перемещения вручную, например, при помощи дисплея на блоке управления. Когда оператор завершает перемещение вручную, он может активировать автоматическое позиционирование для скважины, указанной блоком управления, или оператор может прервать перемещение вручную и запустить автоматическое позиционирование к скважине, указанной блоком управления. Более того, блок управления может автоматически начинать автоматическое позиционирование к указанной скважине.
Идея другого воплощения изобретения заключается в том, что бурильный агрегат сначала вручную перемещается близко или достаточно близко к начальной точке скважины в соответствии с планом бурения. После того, как бурильный агрегат перемещается к начальной точке скважины ближе, чем на определенное расстояние, включается автоматическое позиционирование. При автоматическом позиционировании блок управления точно перемещает бурильный агрегат к начальной точке данной скважины, и после этого можно начинать бурение. Предел указанного расстояния может быть предварительно задан в блоке управления, или может быть установлен в зависимости от случая. Величина предела расстояния может составлять 0,5 метра или другое подходящее расстояние. Если бурильный агрегат располагается от заданной буровой скважины на расстоянии, превышающем заданный предел расстояния, блок управления может запросить оператора подтвердить начало автоматического позиционирования, или альтернативно блок управления может попросить оператора переместить вручную бурильный агрегат ближе к выбранной буровой скважине до начала автоматического позиционирования. Таким образом, можно обеспечить, при необходимости то, что медленное точное позиционирование не будет осуществляться до перемещения бурильного агрегата достаточно близко к следующей скважине. Перемещение вручную довольно близко к следующей скважине может быть осуществлено быстро.
Идея еще одного воплощения настоящего изобретения заключается в том, что дисплей в блоке управления показывает начальные точки скважин, которые предстоит пробрить, и расположения бурильного агрегата. Элемент управления, расположенный в блоке управления, позволяет перемещать вручную бурильный агрегат для его позиционирования. Положения бурильного агрегата отображено курсором на дисплее. Курсор может также быть оборудован фиксированной областью определенной величины на дисплее. Когда начальная точка скважины, подлежащей бурению, находится внутри фиксированной области, ограниченной курсором, блок управления может определить, что бурильный агрегат находится достаточно близко к начальной точке и может начать автоматическое позиционирование.
Идея дополнительного воплощения изобретения заключается в том, что функция управления согласно изобретению предназначена для формирования части автоматической буровой установки. Таким образом, оператор при желании может включить функцию управления согласно изобретению, посредством чего бурение может осуществляться относительно желаемых скважин отлично от автоматической последовательности бурения бурильного агрегата. Более того, перемещение к окрестности следующей скважины, которую предстоит пробурить, может быть ускорено путем осуществления грубых перемещений вручную вместо автоматического позиционирования.
Идея еще одного воплощения изобретения заключается в том, что новые скважины создаются или добавляются в план бурения уже после начала бурения скважин в соответствии с планом бурения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее воплощения настоящего изобретения будут описаны более подробно со ссылками на прилагаемые чертежи, на которых изображено следующее:
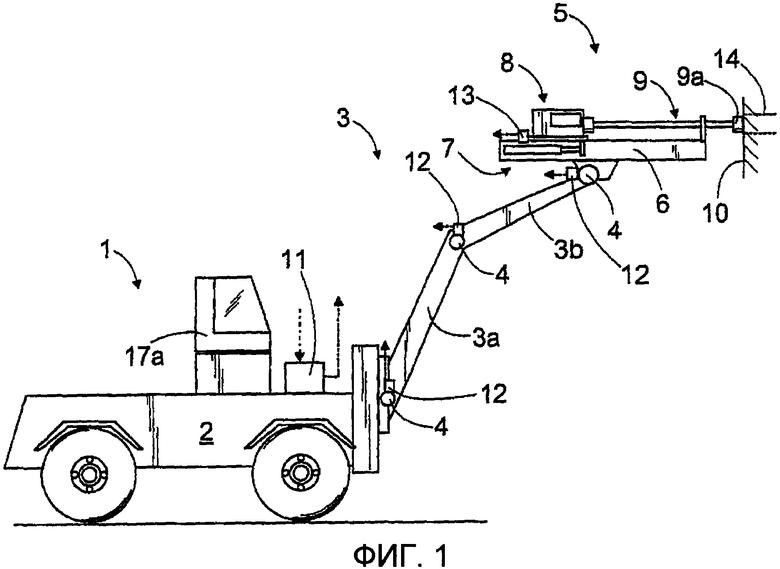
фиг.1 схематично изображает буровую установку в соответствии с изобретением;
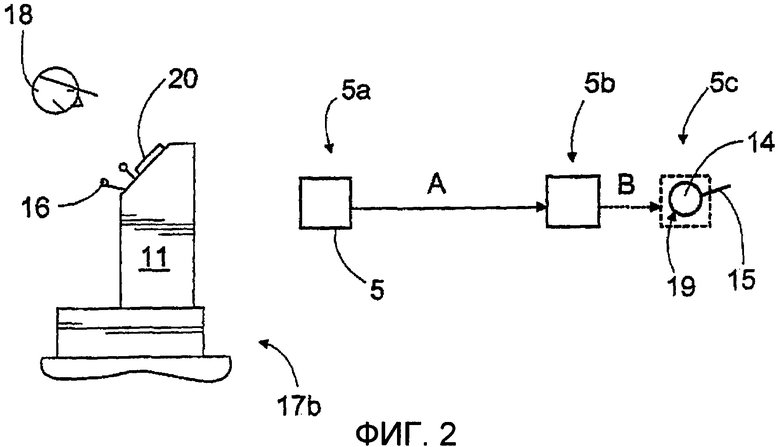
фиг.2 схематично изображает систему в соответствии с изобретением для позиционирования бурильного агрегата;
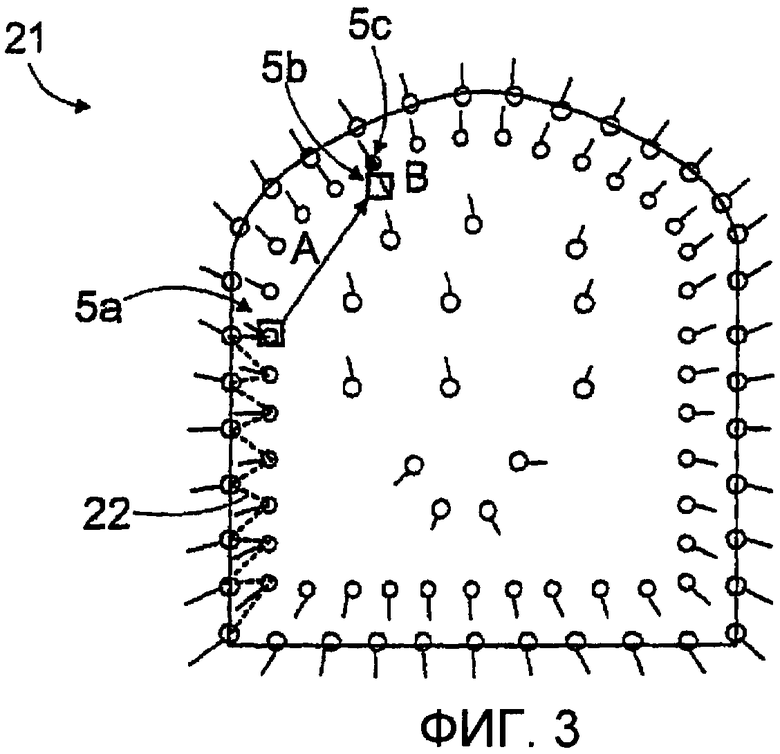
фиг.3 схематично изображает план бурения и позиционирование бурильного агрегата в следующей пробуриваемой скважине;
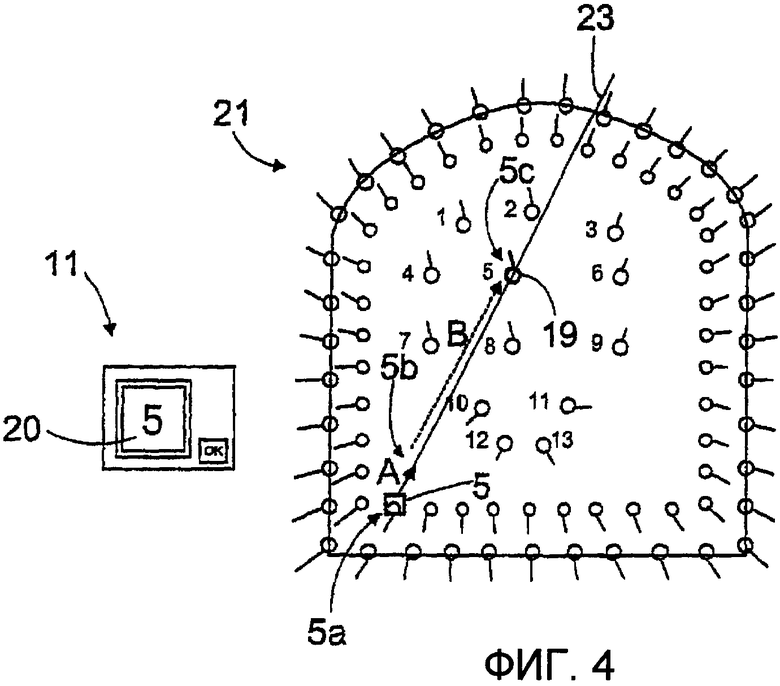
фиг.4 схематично изображает план бурения и другую систему для позиционирования бурильного агрегата в следующей пробуриваемой скважине;
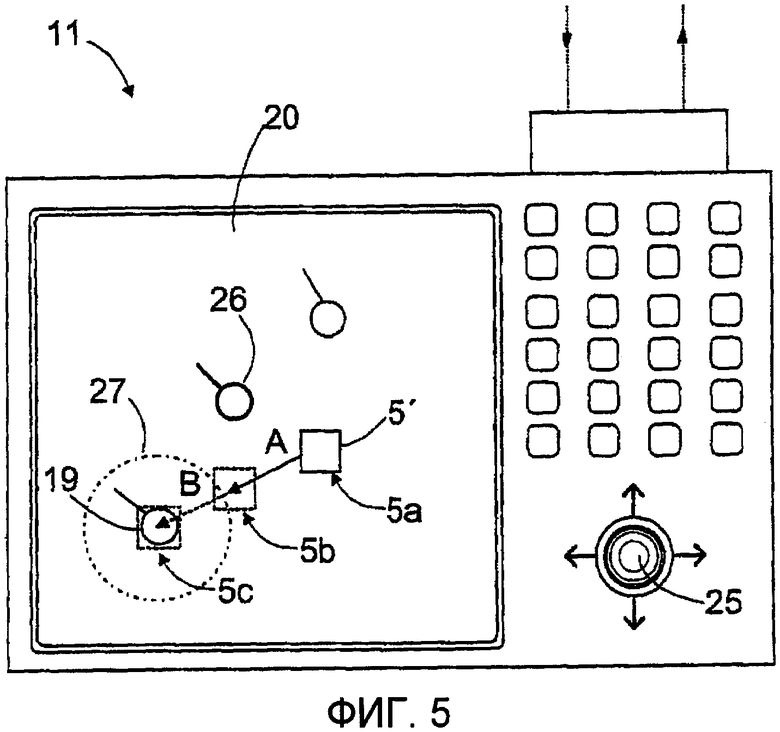
фиг.5 схематично изображает интерфейс пользователя блока управления в буровой установке и дополнительно иллюстрирует способ в соответствии с изобретением для позиционирования бурильного агрегата;
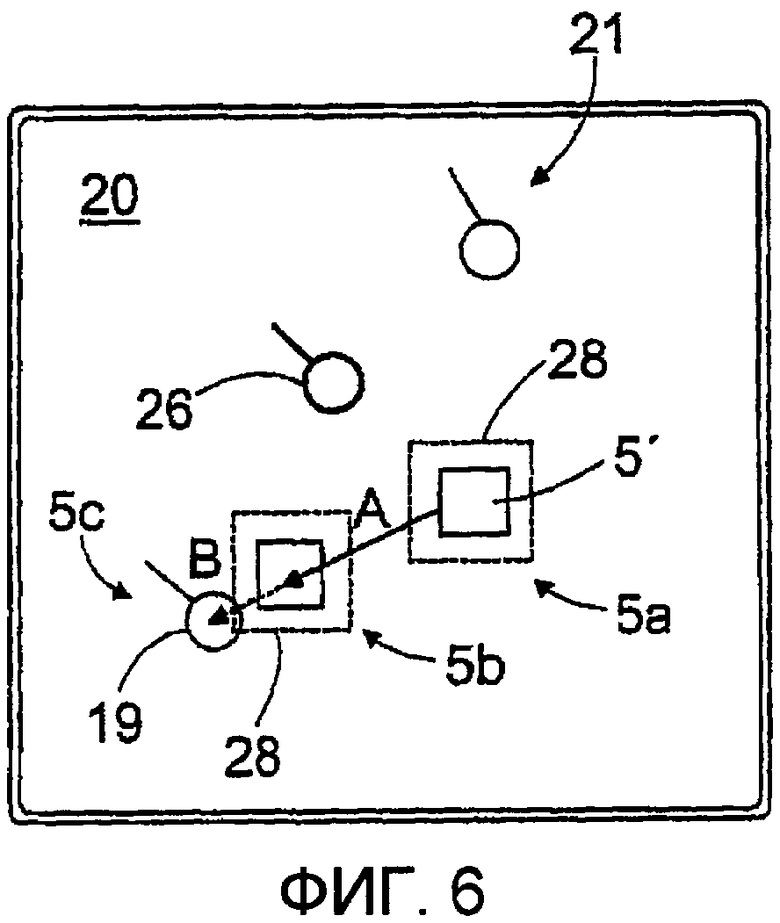
фиг.6 схематично изображает дисплей и иллюстрирует его применение для позиционирования блока управления.
Для ясности изобретение показано в упрощенной форме на Фигурах. На фигурах подобные части обозначены одинаковыми ссылочными позициями.
ПОДРОБНОЕ ОПИСАНИЕ ВОПЛОЩЕНИЙ ИЗОБРЕТЕНИЯ
Буровая установка 1, изображенная на фиг.1, содержит подвижную ходовую часть 2, оснащенную одной или несколькими буровыми стрелами 3. Буровая стрела 3 может включать в себя одну или несколько частей 3а, 3b стрелы, присоединенных друг к другу и к ходовой части 2 при помощи соединений 4, так что стрелы 3 могут перемещаться множеством способов в разных направлениях. Свободный конец буровой стрелы 3 оборудован бурильным агрегатом 5, включающим подающую балку 6, подающее устройство 7, перфоратор 8 и инструмент 9, оборудованный на внешнем своем конце буровым долотом 9а. Перфоратор 8 может быть перемещен посредством подающего устройства 7 относительно подающей балки 6 так, что инструмент 9 может быть подан в ходе бурения к породе 10. Перфоратор 8 может содержать ударное устройство для приложения к инструменту 9 ударных импульсов, а также вращательное устройство для вращения инструмента 9 вокруг его продольной оси. Более того, буровая установка 1 может содержать один или несколько блоков 11 управления для управления бурением. Блок 11 управления может содержать один или несколько процессоров, программируемое логическое устройство или соответствующее устройство, в котором может быть исполнено программное обеспечение, выполнение которого позволяет осуществить способ в соответствии с изобретением для позиционирования бурильного агрегата. В блоке управления 11 может быть задан план бурения, в котором определены места и направления скважин, которые следует пробурить. На фиг.3 и 4 проиллюстрирована два плана бурения. Также в блоке 11 управления может быть задана последовательность бурения, в которой также определен по меньшей мере порядок бурения. Блок 11 управления может также подавать команды для устройств привода, перемещающих буровые стрелы 3, для подающего устройства 7 и для других устройств привода, влияющих на положение бурильного агрегата 5. Также в соединениях 4 буровых стрел 3 могут быть оборудованы один или несколько датчиков 12, и один или более датчиков 13 могут быть оборудованы в бурильном агрегате 5. Результаты измерений, полученные от датчиков 12, 13, направляются на блок 11 управления, который на основе результатов измерений может определять положение и направление бурильного агрегата 5 для регулирования. Блок 11 управления способен обрабатывать положение бурильного агрегата 5 как положение бурового долота 9а и как направление продольной оси инструмента 9.
Фиг.2 иллюстрирует способ в соответствии с изобретением для позиционирования бурильного агрегата 5 относительно скважины 14, которую следует пробурить. Для позиционирования бурильного агрегата 5 начальная точка 14 пробуриваемой скважины может быть определена заранее в блоке 11 управления, так же как и направление 15 бурения. На фиг.2-6 бурильный агрегат 5 показан в упрощенной форме при помощи квадратов. Бурильный агрегат 5 занимает начальное положение 5а до начала позиционирования в соответствии с изобретением, из этого положения бурильный агрегат может быть перемещен к начальной точке 14 скважины, которую следует пробурить следующей, и выбранной оператором при помощи ручных устройств 16 управления, которые могут быть размещены в кабине управления 17а, на уровне 17b бурения или в другом месте в окрестности блока 11 управления. В наиболее простой форме оператор 18 посредством устройств 16 управления управляет цилиндрами, приводящими в движение буровую стрелу 3, и возможно другими устройствами привода, так что ручное управление позволяет переместить бурильный агрегат 5 к начальной точке 14 скважины 19, которую предстоит пробурить, выбранной оператором. Оператор 18 может осуществлять перемещение бурильного агрегата 5 под прямым визуальным контролем, но с другой стороны оператор 18 может следить за ходом перемещения на дисплее 20 блока 11 управления, если видимость до места, в котором следует произвести бурение, слабая. Оператор 18 может перемещать бурильный агрегат 5 быстро и без сложного автоматического управления к воображаемому промежуточному положению 5b, изображенному на фиг.2, где перемещение А вручную может смениться на автоматическое позиционирование В. Наиболее точное и отнимающее время прецизионное позиционирование к начальной точке 14 скважины 19, которую следует точно пробурить, может, таким образом, осуществляться автоматически под управлением блока 11 управления. Промежуточное положение 5b может представлять собой воображаемое положение, место для которого не определено. Поэтому промежуточное положение 5b может описывать, например, момент времени, когда оператор 18 завершает перемещение А вручную и подает команду блоку 11 управления начать автоматическое позиционирование В для заданной скважины 19. Условием для перехода от перемещения А вручную к автоматическому позиционированию В естественно является тот факт, что блок 11 управления должен знать, какую скважину следует бурить следующей. Скважина 19, выбранная оператором 18, может быть определена и каким-либо образом указана блоку 11 управления в ходе перемещения А вручную. В этом случае блок 11 управления после перемещения А вручную способен осуществлять автоматическое позиционирование в начальной точке 14 выбранной скважины 19. Однако оператор 18 может решать, когда следует переходить к позиционированию, осуществляемому блоком 11 управления. Таким образом, оператор 18 может продолжать перемещение А вручную и перемещать бурильный агрегат 5 довольно близко к начальной точке 14, посредством чего можно быстро осуществить грубое позиционирование.
Фиг.3 изображает план 21 бурения и иллюстрирует позиционирование бурильного агрегата 5. Бурильный агрегат 5 способен бурить скважины в соответствии с планом 21 бурения в определенном порядке. Такая последовательность 22 бурения показана на фиг.3 пунктирной линией. В некоторых случаях оператор 18 может, однако, пожелать отклониться от заданного порядка бурения и выбрать другую скважину вместо скважины, определенной в последовательности 22, в качестве скважины 19, которую предстоит пробурить следующей. Следовательно, оператор 18 может прервать последовательность 22 бурения, переключить установку в режим ручного позиционирования и выполнить перемещение А вручную бурильного агрегата 5 по направлению к следующей буровой скважине 19, выбранной самим оператором.
Блок 11 управления может определять положение бурильного агрегата 5 и расстояния до скважин в соответствии с планом бурения. Блок 11 управления также может быть снабжен такой функцией управления, которая способна осуществлять автоматическое позиционирование В бурильного агрегата 5 к начальной точке 14 скважины, которая расположена на наиболее коротком расстоянии от бурильного агрегата 5. Оператор 18 перемещает бурильный агрегат 5 близко к скважине 19, которую желательно пробурить, посредством перемещения А вручную. В этом случае рассматриваемая скважина является ближайшей к бурильному агрегату 5, и блок 11 управления может выполнить автоматическое позиционирование В к ее начальной точке 14. Блок 11 управления может содержать различные вспомогательные устройства и системы, указывающие, какая скважина согласно плану бурения 21 расположена ближе всего к бурильному агрегату 5. Ближайшая скважина может быть обозначена, например, при помощи изменяющегося цвета, мигающего символа скважины, курсора или путем обозначения скважины символом, более ярким, чем другие символы на дисплее блока 11 управления. После этого, когда бурильный агрегат 5 расположен при помощи автоматического позиционирования В в начальной точке скважины 19, выполняется бурение скважины, и после этого бурение продолжается в порядке в соответствии с первоначальной последовательностью 22 бурения, либо, альтернативно, оператор 18 может выбрать новую скважину 19, которую предстоит пробурить, и начать перемещение А вручную в направлении вышеуказанной скважины.
Фиг.4 изображает другой план 21 бурения и иллюстрирует позиционирование бурильного агрегата 5 в соответствии с ним. После того, как бурильный агрегат 5 выполнил бурение буровой скважины в начальном положении 5а, оператор 18 может выбрать новую скважину 19, которую предстоит пробурить. Скважины могут быть обозначены на плане 21 бурения метками, такими, например, как нумерация, показанная на фиг.4. В данном случае оператор 18 выбирает скважину номер пять в качестве следующей скважины 19. Оператор 18 может начать перемещение А вручную по направлению к выбранной скважине. Блок 11 управления может следить за направлением осуществляемого позиционирования и определять, указывает ли направление перемещения на скважину в соответствии с планом бурения. Блок 11 управления может указывать подходящим способом, что он определил, что перемещение осуществляется к данной скважине, и что может быть выбрано автоматическое позиционирование к начальной точке скважины. На фиг.4 направление перемещения А вручную обозначено линией 23, которая проходит через скважину номер пять. Скважина на линии 23 перемещения А вручную, соответствующая плану 21 бурения, может быть обозначена, например, на дисплее 20 блока 11 управления при помощи номера скважины. Блок 11 управления может подождать, пока оператор 18 примет автоматическое позиционирование В, после того, как он обнаружил, что скважина находится на линии 23 перемещения А вручную. Когда оператор 18 принимает скважину, предложенную блоком 11 управления, начинается автоматическое позиционирование В. Если план 21 бурения показан на дисплее 20 полностью или частично, то скважина, располагающаяся на линии 23 перемещения А вручную, может быть обозначена подходящим визуальным отличительным знаком, например мигающим символом.
Также возможно, чтобы оператор 18 вводил обозначение скважины 19, которую предстоит пробурить следующей, например номер скважины, код или тому подобное, в блок 11 управления до начала перемещения А вручную, в ходе этого перемещения или после перемещения. Оператор 18 может также указать следующую скважину, которую предстоит пробурить, на дисплее блока 11 управления.
Фиг.5 изображает решение для осуществления перемещения А вручную в блоке 11 управления в качестве альтернативы перемещению, осуществляемому при помощи ручных устройств 16 управления. План 21 бурения или отдельная его часть могут быть показаны на дисплее 20 блока 11 управления. На дисплее 20 положение бурильного агрегата 5 может быть обозначено символом 5', в данном случае - квадратом. Действительное положение бурильного агрегата 5 может быть определено при помощи датчиков 4, и положение символа 5' может быть передано на план 21 бурения, отображаемый на дисплее 20. Бурильный агрегат 5 может перемещаться одновременно с перемещением символа 5' по дисплею 20, например, при помощи стрелок-указателей, джойстика, сенсорного экрана или другого устройства 25 управления. На фиг.5 бурильный агрегат 5 размещен в начальном положении 5а, и в этом случае скважина 26 в соответствии с планом бурения, ближайшая к нему, может быть обозначена на дисплее 20 при помощи, например, линии большей толщины. Если оператор 18 не желает переместить бурильный агрегат 5 в данный момент к ближайшей скважине 26, а желает выбрать другую скважину 19 в качестве следующей пробуриваемой скважины, то оператор 18 может переместить символ 5' по направлению к выбранной скважине 19 и выполнить перемещение А вручную. Когда символ 5' переводится достаточно близко к выбранной скважине 19, т.е. к промежуточному положению 5b, скважина 19 может быть обозначена на дисплее 20 линией большей толщины вместо скважины 26. Затем блок 11 управления может получить команду осуществить автоматическое позиционирование В к начальной точке 14 выбранной скважины 19. Для позиционирования в блоке 11 управления может быть задан предел расстояния 27, и бурильный агрегат 5 должен быть помещен на более короткое расстояние в конце перемещения А вручную.
Фиг.6 иллюстрирует осуществление позиционирования на дисплее 20. Символ 5' бурильного агрегата 5 может быть обеспечен пределом 28 расстояния, и в этом случае оператор на дисплее 20 может видеть, когда символ 5' перемещается, так что предел 28 расстояния ограничивает выбранную скважину. После этого оператор 18 может переключиться на автоматическое позиционирование В.
Перемещение А вручную бурильного агрегата 5 может быть осуществлено в режиме реального времени при помощи ручных устройств 16 управления, или может быть осуществлено при помощи элементов 25 управления на дисплее 20. При использовании ручных элементов 16 управления положение бурильного агрегата, план 21 бурения и другая требуемая информация для облегчения позиционирования могут в это же время отображаться на дисплее 20. Когда элементы 25 управления интерфейса пользователя используются для перемещения вручную, бурильный агрегат 5 может перемещаться одновременно с перемещением его символа по дисплею 20.
Как показано в вышеприведенных вариантах, изобретение позволяет использовать различные пути для обеспечения блока управления информацией о следующей пробуриваемой скважине. Оператору не обязательно выбирать следующую пробуриваемую скважину до начала перемещения вручную. Вместо этого он может осуществить выбор в ходе перемещения вручную и позволить блоку управления предложить скважину, которую следует пробурить следующей, в ходе перемещения вручную. Существуют различные возможности для выбора момента, когда перемещение вручную сменяется на автоматическое позиционирование.
Следует отметить, что блок 11 управления буровой установки 1 может включать в себя один или несколько телекоммуникационных блоков, позволяющих блоку 11 управления сообщаться при помощи проводов или беспроводным образом с датчиками 12, 13 и с устройствами привода, включенными в буровую установку 1 для передачи результатов измерений и команды управления. Блок 11 управления может также включать в себя одно или несколько считывающих устройств для считывания программного обеспечения и для обеспечения параметров управления. Альтернативно, информация может подаваться в память блока 11 управления при помощи клавиатуры или телекоммуникационного соединения. Блок 11 управления может включать в себя один или несколько процессоров или соответствующих электронных устройств, в которых может быть исполнено программное обеспечение для осуществления позиционирования в соответствии с изобретением. Программное обеспечение может считываться с запоминающих устройств или может быть загружено с другого компьютера или из сети передачи данных. Программное обеспечение может также представлять собой известное программно-аппаратное решение.
В некоторых случаях признаки, показанные в данном заявлении, могут быть применены сами по себе независимо от прочих признаков. С другой стороны признаки, показанные в данном заявлении, могут быть скомбинированы при необходимости для формирования различных комбинаций.
Прилагаемые чертежи и спецификация предназначены лишь для иллюстрирования идеи изобретения. Что касается подробностей, изобретение может быть изменено в пределах формулы изобретения.
Изобретение относится к системе для позиционирования бурильного агрегата в начальной точке скважины. Техническим результатом является усовершенствование позиционирования бурильного агрегата. Способ включает перемещение вручную бурильного агрегата по направлению к следующей пробуриваемой скважине. После перемещения вручную осуществляют автоматическое позиционирование по направлению к той же самой пробуриваемой скважине, при этом бурильный агрегат перемещают под управлением блока управления к начальной точке следующей пробуриваемой скважины для начала ее бурения. 3 н. и 14 з.п. ф-лы, 6 ил.
1. Способ позиционирования бурильного агрегата (5) буровой установки (1), содержащей, по меньшей мере, одну буровую стрелу (3), бурильный агрегат (5), расположенный на буровой стреле (3), по меньшей мере, один датчик (4) для определения положения и направления бурильного агрегата (5), по меньшей мере, один блок (11) управления с заданным планом (21) бурения и по меньшей мере один элемент (16, 25) управления для управления вручную положением бурильного агрегата (5), включающий определение положения бурильного агрегата (5), размещение бурильного агрегата (5) в начальной точке (14) скважины, заданной в плане (21) бурения, выравнивание бурильного агрегата (5) в направлении (15) бурения, определенном в плане (21) бурения, и бурение скважины в соответствии с планом (21) бурения, отличающийся тем, что осуществляют перемещение (А) вручную бурильного агрегата (5) по направлению к следующей пробуриваемой скважине (19), и после перемещения (А) вручную осуществляют автоматическое позиционирование (В) по направлению к той же самой пробуриваемой скважине (19) при перемещении бурильного агрегата (5) под управлением блока (11) управления к начальной точке (14) следующей пробуриваемой скважины (19) для начала ее бурения.
2. Способ по п.1, отличающийся тем, что включает определение следующей пробуриваемой скважины (19) в блоке (11) управления на основании перемещения (А) вручную бурильного агрегата (5).
3. Способ по п.2, отличающийся тем, что включает определение следующей пробуриваемой скважины (19) в блоке (11) управления на основании перемещения (А) вручную бурильного агрегата (5) и активацию после перемещения (А) вручную автоматического позиционирования (В).
4. Способ по п.1, отличающийся тем, что включает определение в блоке (11) управления расстояния бурильного агрегата (5) до, по меньшей мере, нескольких начальных точек (14) пробуриваемых скважин в соответствии с планом (21) бурения, предложение с блока (11) управления оператору перейти от перемещения (А) вручную бурильного агрегата (5) к автоматическому позиционированию и осуществить позиционирование в ближайшей скважине, и автоматическое позиционирование (В) в начальной точке (14) ближайшей скважины после одобрения оператором.
5. Способ по п.2, отличающийся тем, что включает определение в блоке (11) управления расстояния бурильного агрегата (5) до, по меньшей мере, некоторых из начальных точек (14) скважин в соответствии с планом (21) бурения, определение в блоке (11) управления в качестве следующей пробуриваемой скважины (19) в соответствии с планом (21) бурения скважины, наиболее близко расположенной к бурильному агрегату (5) после перемещения (А) вручную, активацию автоматического позиционирования (В), и автоматическое позиционирование (В) в начальной точке (14) ближайшей скважины.
6. Способ по п.1, отличающийся тем, что включает отображение на дисплее (20) блока (11) управления несколько начальных точек (14) скважин в соответствии с планом бурения (21), при помощи символа (5') на дисплее (20) отображают положение бурильного агрегата (5) и перемещение (А) вручную бурильного агрегата (5) путем перемещения символа (5') бурильного агрегата (5) при помощи элементов (25) управления дисплея (20) по направлению к следующей пробуриваемой скважине (19).
7. Способ по п,1, отличающийся тем, что включает отображение положения бурильного агрегата (5) при помощи символа (5') на дисплее (20) и визуальное указание на дисплее (20) начальную точку (14) скважины, которая расположена на наименьшем расстоянии от бурильного агрегата (5).
8. Способ по любому из пп.1-7, отличающийся тем, что включает определение для блока (11) управления, по меньшей мере, одного предела расстояния, который ограничивает наибольшее допустимое расстояние между бурильным агрегатом (5) и начальной точкой (14) выбранной скважины (19), и обеспечение возможности не начинать автоматическое позиционирование (В) до достижения расстояния от бурильного агрегата (5) до начальной точки (14) скважины (19), выбранной оператором (18), величины меньшей заданного предела расстояния.
9. Способ по любому из пп.1-7, отличающийся тем, что включает задание, во время бурения, в плане (21) бурения начальной точки (14), по меньшей мере, одной новой пробуриваемой скважины.
10. Программный продукт для управления бурильным агрегатом буровой установки, содержащей, по меньшей мере, одну буровую стрелу (3) и, по меньшей мере, один бурильный агрегат (5), установленный на буровой стреле (3), по меньшей мере, один датчик (4) для измерения положения и направления бурильного агрегата (5), по меньшей мере, один блок (11) управления и, по меньшей мере, один элемент (16, 25) управления для перемещения вручную бурильного агрегата (5), при этом при обработке программного продукта в блоке (11) управления обеспечивается определение в блоке управления (11) положения бурильного агрегата (5) на основе результатов измерения, полученных от датчика (4), размещение бурильного агрегата (5) в начальной точке (14) буровой скважины, заданной на плане (21) бурения, и бурение скважины в направлении (15) бурения согласно плану (21) бурения, отличающийся тем, что при обработке программного продукта в блоке (11) управления дополнительно определяется положение бурильного агрегата (5) в блоке (11) относительно, по меньшей мере, некоторых начальных точек (15) скважин согласно плану (21) бурения, обеспечивается перемещение (А) вручную бурильного агрегата (5), осуществляемое оператором (18), в направлении следующей пробуриваемой скважины (19), и после перемещения (А) вручную осуществление автоматического позиционирования (В) в начальную точку (14) той же следующей пробуриваемой скважины для начала бурения.
11. Программный продукт по п.10, отличающийся тем, что при его обработке в блоке (11) управления дополнительно обеспечивается наблюдение за перемещением (А) вручную, определение следующей пробуриваемой скважины (19) на основании перемещения (А) вручную и после перемещения (А) вручную осуществление автоматического позиционирования (В) в начальную точку (14) той же самой следующей скважины (19), для начала бурения.
12. Программный продукт по п.10 или 11, отличающийся тем, что при его обработке в блоке (11) управления дополнительно обеспечивается автоматическое позиционирование (В) в скважине, расположенной на наименьшем расстоянии от бурильного агрегата (5) в конце перемещения (А) вручную.
13. Программный продукт по п.10, отличающийся тем, что при его обработке в блоке (11) управления обеспечивается отображение плана (21) бурения, содержащегося в блоке (11) управления, при этом, по меньшей мере, начальные точки (14) пробуриваемых скважин видны на дисплее (20) отображение с помощью символа (5') на дисплее (20) блока (11) управления положения бурильного агрегата (5) относительно начальных точек (14) пробуриваемых скважин, и осуществление перемещения (А) вручную посредством перемещения символа (5') с помощью элемента (25) управления, имеющегося в дисплее (20).
14. Программный продукт по п.10, отличающийся тем, что при его обработке в блоке (11) управления обеспечивается предотвращение перехода блока (11) управления от перемещения (А) вручную к автоматическому позиционированию (В), если бурильный агрегат (5) находится на расстоянии от начальной точки (14) следующей пробуриваемой скважины (19), превышающем заданный предел расстояния.
15. Программный продукт по п.10, отличающийся тем, что при его обработке в блоке (11) управления обеспечивается определение блоком (11) управления следующей пробуриваемой скважины на основании направления перемещения (А) вручную и его готовность после определения осуществить автоматическое позиционирование (В) в начальной точке (14) указанной скважины.
16. Программный продукт по п.10, отличающийся тем, что при его обработке в блоке (11) управления обеспечивается по существу непрерывное определение в блоке (11) управления расстояния до начальных точек (14) всех скважин согласно плану (21) бурения.
17. Буровая установка, содержащая ходовую часть (2), по меньшей мере, одну буровую стрелу (3) и, по меньшей мере, один бурильный агрегат (5), содержащий подающую балку (6), расположенную на буровой стреле, перфоратор (8), способный перемещаться при помощи подающего устройства (7) относительно подающей балки (6), и инструмент (9), присоединяемый к перфоратору (8), по меньшей мере, один блок (11) управления с заданным планом (21) бурения, в котором указаны, по меньшей мере, начальные точки (14) пробуриваемых скважин, при этом блок (11) управления обеспечивает возможность автоматического управления бурильным агрегатом (5), по меньшей мере, один элемент (16, 25) управления для управления вручную бурильным агрегатом (5), по меньшей мере, один датчик (4) для определения положения и направления бурильного агрегата (5), и средства для позиционирования бурильного агрегата (5) в пробуриваемой скважине, отличающаяся тем, что блок (11) управления способен определять положение бурильного агрегата (5) относительно, по меньшей мере, нескольких начальных точек (14) скважин в соответствии с планом (21) бурения, бурильный агрегат (5) способен перемещаться сначала вручную по направлению к следующей пробуриваемой скважине (19), при этом блок управления (11) способен выполнять после перемещения вручную автоматическое позиционирование (В) бурильного агрегата в начальной точке (14) той же самой следующей пробуриваемой скважины (19) для начала бурения.
| ФЕЛЬДМАН В.Я | |||
| и др | |||
| Автоматизированные шахтные бурильные установки-буровые роботы | |||
| - М.: Недра, 1989, с.71, 72, 85, 132, 136, 138, 140-142 | |||
| RU 2005131194 А, 10.02.2006 | |||
| БУРОВОЙ МАНИПУЛЯТОР | 1998 |
|
RU2143067C1 |
| WO 03048524 А1, 12.06.2003 | |||
| DE 3902127 А1, 26.07.1990. | |||

