Изобретение относится к горной промышленности, в частности к буровым манипуляторам.
Известен буровой манипулятор [1, с. 2 -4], включающий основание, стрелу, направляющую балку для крепления бурильной машины и приводы наведения ее в рабочее положение.
Недостатком такой конструкции манипулятора является использование жесткой стрелы, каждая точка которой движется по сфере, что при позиционировании приводит к необходимости применения дополнительных устройств, обеспечивающих поступательное перемещение инструмента и компенсацию его смещения от забоя.
Наиболее близкой к заявляемой является конструкция бурового манипулятора [2], выполненная в виде шарнирной призмы с треугольными основаниями, одно из которых закреплено на механизме хода бурового агрегата. Эта конструкция обеспечивает поступательное движение подвижного треугольного основания.
Недостатком такой конструкции является то, что при наведении бурильной машины на требуемое направление бурения шпура она также приводит к смещению выходного звена вдоль оси горной выработки и вызывает необходимость дополнительного устройства компенсации этого смещения.
Задача изобретения - повысить производительность бурового агрегата за счет точности позиционирования бурильной машины, которая обеспечивается конструкцией бурового манипулятора, позволяющей автоматическое направление штанги бурильной машины в рабочей зоне забоя для бурения шпуров при отсутствии смещения инструмента от плоскости забоя.
Сущность изобретения состоит в том, что в буровом манипуляторе, включающем шарнирную призму с треугольным основанием, образованную шарнирно соединенными подвижными звеньями, приводы поворота и подъема, к первой шарнирной призме последовательно присоединена вторая треугольная шарнирная призма, для обеспечения движения которой установлены приводы поворота и подъема, при этом платформа, соединяющая две треугольные шарнирные призмы, выполнена за одно целое с основанием приводов поворота и подъема обеих призм, а звено, на котором установлена бурильная машина, входит в двухподвижные пары со звеньями манипулятора. Присоединение второй треугольной шарнирной призмы позволяет путем определенного управления приводами несущих ребер шарнирных призм добиться необходимого пространственного положения бурильной машины, установленной на основании, наиболее удаленном от неподвижного основания первой призмы, причем за счет обеспечения относительного поступательного движения оснований призм не требуются дополнительные устройства наведения штанги на нужное направление.
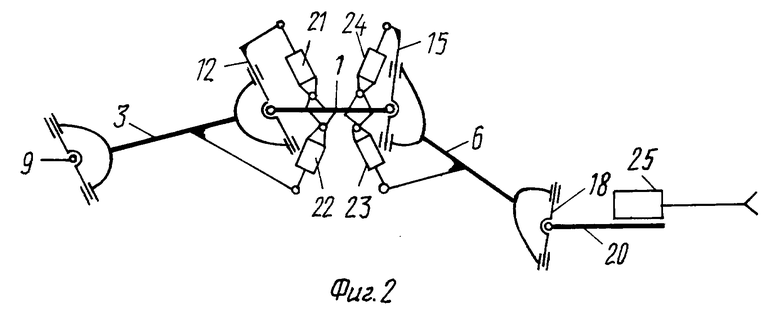
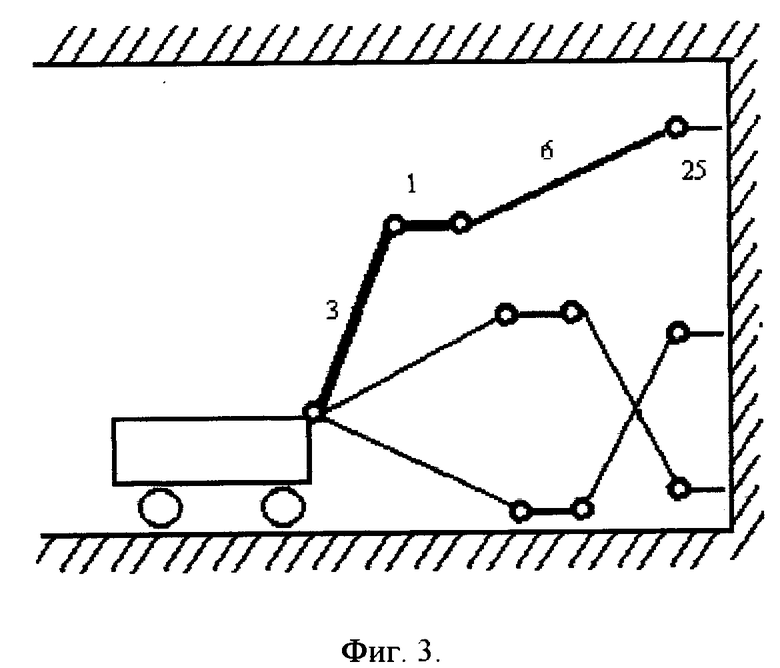
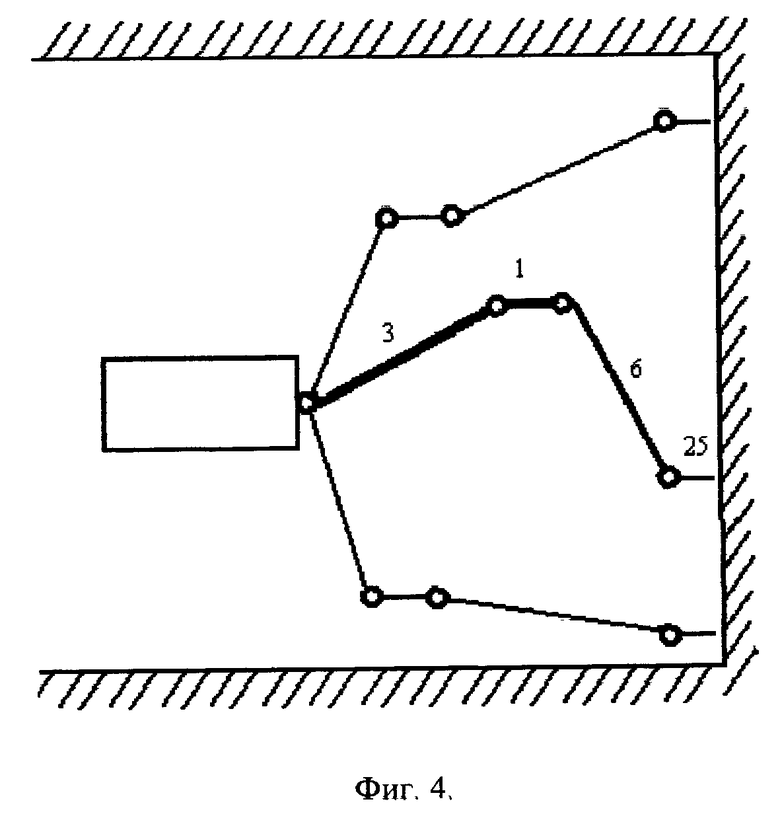
На фиг. 1 изображена кинематическая схема предлагаемого бурового манипулятора; на фиг. 2 представлена схема части манипулятора, включающей только несущие ребра призм; возможные положения направляющих ребер манипулятора в вертикальной плоскости показаны на фиг. 3, а в горизонтальной плоскости - на фиг. 4.
Буровой манипулятор содержит две шарнирные призмы, последовательно соединенные между собой посредством платформы - звена 1, ребрами первой из призм являются бинарные звенья 2, 3 и 4, а ребрами второй - бинарные звенья 5, 6 и 7, которые соединяются с основаниями призм при помощи карданных пар: пары 8, 9, 10 соединяют с неподвижным основанием, закрепленном на механизме хода бурового агрегата, пары 11, 12, 13, 14, 15, 16 - с первой подвижной платформой 1, а пары 17, 18, 19 - со второй подвижной платформой 20; и приводы подъема 21 и поворота 22 манипулятора, обеспечивающие движение первой шарнирной призмы, и приводы подъема 23 и поворота 24, обеспечивающие движение второй шарнирной призмы. На чертеже (фиг. 2) изображены несущие бинарные звенья 3 и 6, каждое из которых входит во вращательные пары и посредством крестообразных звеньев 9, 12 и 15, 18 соединено с неподвижным основанием, подвижной платформой 1, на которой установлены приводы 21, 22, 23 и 24, и подвижной платформой 20, на которой установлена бурильная машина 25. Приводы 21 и 22 обеспечивают поворот несущего звена 3 первой призмы, а следовательно, и всей первой призмы, в двух взаимно перпендикулярных плоскостях, а приводы 23 и 24 обеспечивают поворот несущего звена 6 второй призмы, а следовательно, и всей второй призмы в двух взаимно перпендикулярных плоскостях. Вспомогательные звенья призм служат для координации движений подвижных платформ.
Буровой манипулятор работает следующим образом. Приводами 21 и 22 обеспечивается определенное поступательное движение звена 1, а приводами 23 и 24 - выходного звена 20 с установленной на нем бурильной машиной. Конструкция обеих призм обеспечивает поступательное движение бурильной машины, а совместное управление приводами первой и второй призм позволяет добиться движения бурильной машины в плоскости, параллельной плоскости забоя, за счет компенсации смещения бурильной машины от плоскости забоя, обусловленного движением первой призмы, противоположным смещению бурильной машины, создаваемому движением второй призмы.
Литература
1. Дворников Л. Т., Давыдов А.П. Манипуляторы буровых агрегатов. Обзор, серия "Механизация производства, эксплуатация и ремонт оборудования в цветной металлургии". Вып. 2. - М.: Министерство цветной металлургии СССР, ЦНИИцветмет экономики и информ., 1987, с. 2-4.
2. Патент Швейцарии N 474662, кл. 8 b 11/02, опубл. 1963.9
| название | год | авторы | номер документа |
|---|---|---|---|
| БУРОВОЙ МАНИПУЛЯТОР | 1998 |
|
RU2143050C1 |
| БУРОВОЙ МАНИПУЛЯТОР | 2003 |
|
RU2242578C1 |
| ДВУХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137964C1 |
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2240454C1 |
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2241880C1 |
| ЧЕТЫРЕХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2004 |
|
RU2261386C1 |
| УДАРНЫЙ МЕХАНИЗМ | 1998 |
|
RU2147662C1 |
| УДАРНЫЙ МЕХАНИЗМ | 1998 |
|
RU2148143C1 |
| ВРАЩАТЕЛЬНАЯ БУРИЛЬНАЯ МАШИНА | 1998 |
|
RU2143066C1 |
| ГРУЗОПОДЪЁМНАЯ ПЛАТФОРМА | 2003 |
|
RU2252912C2 |
Изобретение относится к горной промышленности и позволяет повысить производительность бурового агрегата за счет точности позиционирования бурильной машины. Для этого в буровой манипулятор, включающий треугольную шарнирную призму, образованную шарнирно соединенными подвижными звеньями, приводы поворота и подъема, введена вторая шарнирная призма с приводами ее поворота и подъема, при этом платформа, последовательно соединяющая две шарнирные призмы и основание приводов поворота и подъема манипулятора, выполнена за одно целое, а звено, на котором установлена бурильная машина, входит в три двухподвижные пары со звеньями манипулятора. 4 ил.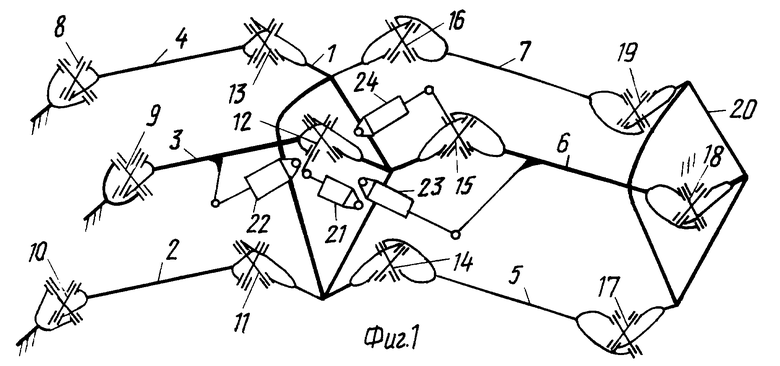
Буровой манипулятор, включающий треугольную шарнирную призму, образованную шарнирно соединенными подвижными звеньями, приводы поворота и подъема, отличающийся тем, что он содержит вторую шарнирную призму с приводами ее поворота и подъема, при этом платформа, последовательно соединяющая две шарнирные призмы и основание приводов поворота и подъема манипулятора, выполнена за одно целое, а звено, на котором установлена бурильная машина, входит в три двухподвижные пары со звеньями манипулятора.
| Холодильно-газовая машина | 1973 |
|
SU474662A1 |
| Манипулятор для бурильных машин | 1971 |
|
SU461221A1 |
| Манипулятор для бурильных машин | 1981 |
|
SU1023080A1 |
| Манипулятор для бурильных машин | 1982 |
|
SU1099066A1 |
| Манипулятор для бурильных машин | 1984 |
|
SU1209844A1 |
| Буровой манипулятор | 1985 |
|
SU1270318A1 |
| Буровой манипулятор | 1986 |
|
SU1430518A1 |
| БУРОВОЙ МАНИПУЛЯТОР | 1994 |
|
RU2083820C1 |
