Изобретение относится к мишеням для определения внешнебаллистических параметров (координат, скорости) пуль и снарядов при стрельбе прямой наводкой по вертикальным преградам (мишеням) и может использоваться при экспериментальном определении меткости и кучности стрельбы и приведении оружия к нормальному бою, при определении скорости, при обучении и тренировке.
Известны метод и аппаратура для определения координат пули [Патент США №3487226, кл. 250-222, 1996 г. Метод и аппаратура для определения координат пули измерением временных интервалов между последовательным пересечением световых экранов], измерением временных интервалов между последовательным пересечением пулей световых экранов - оптических плоскостей, основанных на применении оптических систем, состоящих из щелевых источников света, расположенных на раме по одну сторону от снопа траекторий, и щелевых фотоприемников, расположенных по другую сторону. Щелевой источник каждого светового экрана содержит расположенные в ряд источники света и коллимационные линзы, формирующие параллельные пучки лучей, из которых щелью вырезается экран конечной толщины. Экраны каждого источника (до 12-ти штук) примыкают вплотную друг к другу, образуя общий световой экран. Щелевой приемник каждого светового экрана содержит расположенные за щелью фокусирующие линзы напротив соответствующих источников света, в фокусах которых установлены фотоприемники (фотодиоды). Фотодиоды объединены группами по 6 штук по схеме ИЛИ на входах предусилителей фототоков, сигналы предусилителей объединяются по схеме ИЛИ на входах триггера Шмидта. В результате при затенении пролетающей пулей или снарядом части светового потока формируется электрический сигнал, приводящий к срабатыванию триггера Шмидта. По сигналу от первого светового экрана запускаются 3 хронометра, а по сигналам от следующих трех экранов хронометры останавливаются. По измеренным хронометрами временным интервалам вычисляются координаты точки попадания в мнимую мишень (плоскость регистрации, совпадающую с последним экраном).
Недостатками световой плоскости, основанной на световых экранах, образованных щелевыми источниками и щелевыми приемниками, являются небольшой размер поля регистрации и большая вероятность повреждения аппаратуры от рикошетов несмотря на бронезащиту перед аппаратурой из-за близкого расположения ее к снопу траекторий; сложность и трудоемкость настройки в фокус коллиматоров и фотоприемников, а также низкая надежность из-за большого количества источников света и фотоприемников и предусилителей фототоков; сложность экранирования и защиты от наводок слаботочных цепей, так как фотоприемники и предусилители разнесены на относительно большое расстояние; низкая точность измерения и возможность стрельбы только по нормали к мишени из-за близкого расположения источников света и приемников, а а также по причине использования расчетных соотношений, справедливых в случае траекторий, нормальных к плоскости мишени.
Наиболее близким аналогом является световая мишень [Световая мишень. Патент РФ №2213320 от 27.09.2003 по заявке №2002116940, кл. F41J 5/02 от 24.06.2002. ВНИИГПЭ / Авторы Афанасьева Н.Ю., Веркиенко Ю.В., Казаков B.C., Коробейников В.В. (прототип)], содержащая линейные протяженные источники света и оптико-электронные преобразователи, установленные по разные стороны от снопа траекторий и попарно образующие световые экраны, наклоненные под разными углами, коаксиальные линии связи, согласующие (пороговые) устройства, схему ИЛИ и компьютер, вход обработки прерываний которого подключен к выходу схемы ИЛИ.
Недостатками устройства являются большое количество датчиков и соответственно коаксиальных линий связи, низкая точность измерения моментов времени пресечения нулей световых экранов из-за ограниченных возможностей аналоговой фильтрации сигнала и пульсации суммарного сигнала ввиду пульсации напряжения источника питания излучателей, а также из-за разного запаздывания датчиков.
Задача изобретения заключается в устранении недостатков известного устройства путем уменьшения количества датчиков и коаксиальных линий связи, преобразовании аналоговых сигналов в цифровые для последующей цифровой обработки и фильтрации.
Задача решается тем, что источники света объединены в две пары, источники света каждой пары установлены V - образно, причем в одной паре они развалены относительно друг друга на одинаковые и противоположные острые углы сверху, а в другой паре - снизу, световые потоки от каждой пары источников света поступают на один оптико-электронный преобразователь, расположенный по другую сторону от снопа траекторий напротив оси симметрии пары излучателей.
Технический результат - Предложенная схема расположения источников света и оптико-электронных преобразователей (соответственно световых экранов) обеспечивает одинаковые расстояния между источниками света и оптико-электронными преобразователями (соответственно одинаковые сигналы и уменьшение погрешности измерений), близость к идеальной схеме (соответственно с высокой обусловленностью системы уравнений модели и измерением средней скорости по базе в районе мишени). Переход к цифровым сигналам, цифровая фильтрация и использование эталонных сигналов от первых экранов каждой пары экранов обеспечивают выделение сигналов от вторых экранов каждой пары, что позволило приблизить излучатели для получения изображений источников света каждой пары на одном фотоприемнике оптико-электронного преобразователя, тем самым сократить количество оптико-электронных преобразователей и коаксиальных линий связи (соответственно повысив надежность, уменьшив стоимость и снизив погрешность определения координат и скорости). Наклон всех экранов избавляет от сигнала помехи от дульной волны и позволяет использовать мишень на минимальной дальности 25-50 м.
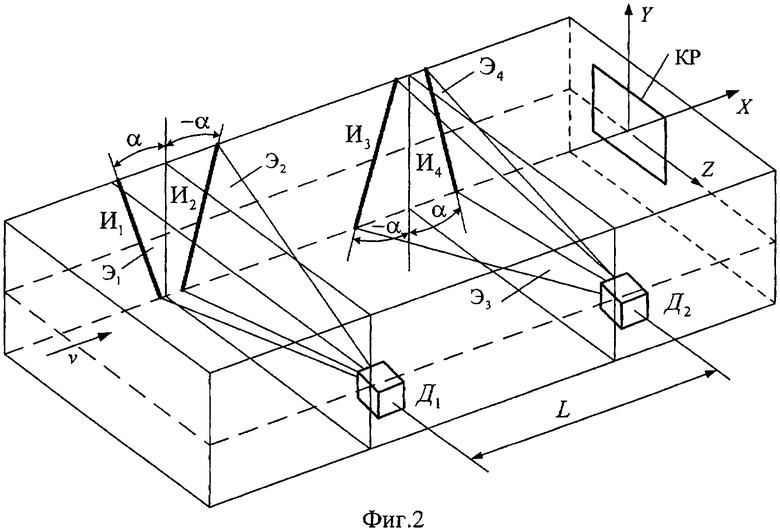
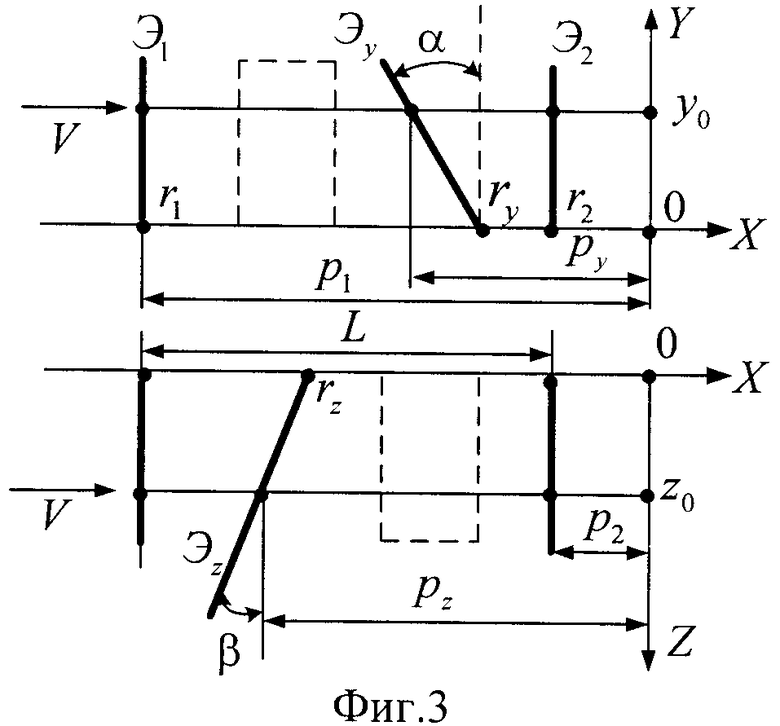
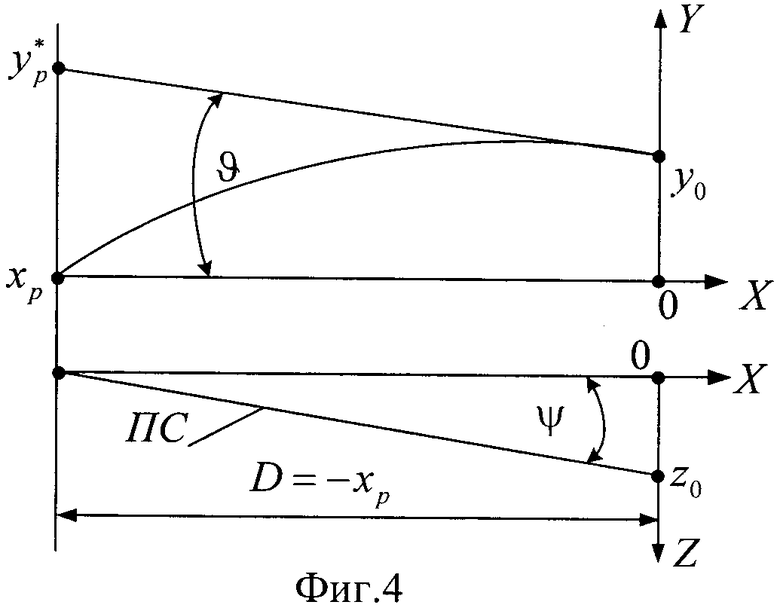
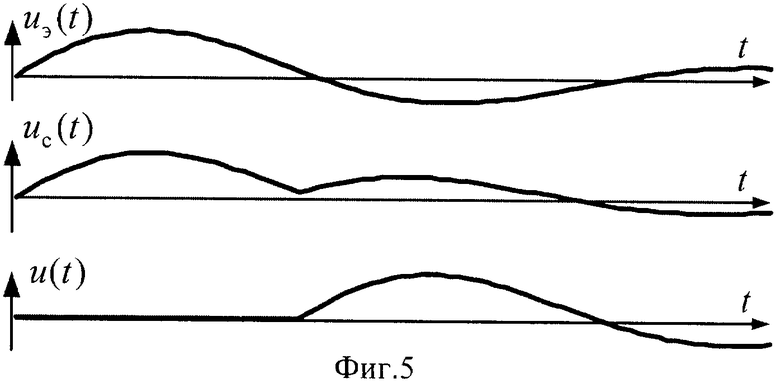
На фиг.1 изображена схема световой мишени, на фиг.2 - схема расположения источников света, оптико-электронных преобразователей и контрольной рамки в тире; на фиг.3 - проекции экранов Э1 Э2, Эy, Эz на вертикальную XY и горизонтальную XZ плоскости, на фиг.4 - проекции траектории на плоскости XY и XZ, на фиг.5 - сигналы на выходе сумматора 2, формируемые при пересечении пулей экранов Э1 и Э2.
Устройство содержит источники света И1…И4, оптико-электронные преобразователи Д1, Д2, контрольную рамку КР, коаксиальные линии связи 1, сумматор аналоговых сигналов 2, селектор 3, регистратор (цифровой осциллограф) 4, персональный компьютер 5 с устройством отображения информации (дисплеем) и связи испытателя с компьютером 6, генератор дискретных сигналов 7. Оружие для испытаний устанавливается на станке 8 или удерживается испытателем. Источники света И1,…,И4 установлены в вертикальной плоскости (вдоль стены тира), а оптико-электронные преобразователи - на противоположной стороне (вдоль другой стены тира). Источники света первой пары И1, И2 расположены симметрично V - образно и наклонены на одинаковые по абсолютной величине углы + α и -α, т.е. в противоположном направлении. Источники света второй пары И3, И4 также расположены симметрично V-образно, но развалены снизу на углы - α и +α, так что источники света И1, И3 и И2, И4 соответственно параллельны. Оптико-электронные преобразователи Д1 и Д2 установлены напротив пар источников света И1 И2 и И3, И4 перпендикулярно направлению стрельбы в плоскостях симметрии источники света каждой пары. Выходы оптико-электронных преобразователей соединены со входами схемы 2 суммирования аналоговых сигналов, с выхода которой через селектор 3 поступают на вход цифрового запоминающего осциллографа 4, выход которого соединен с персональным компьютером 5, связанным с устройством 6 отображения информации и связи испытателя с компьютером. Фиг.3 иллюстрирует метод четырех световых экранов (световых клиньев). Базовые экраны Э1 и Э2 перпендикулярны оси Х (параллельны плоскости YZ), экран Эy повернут на угол α относительно оси Z, a экран Эz - на угол β относительно оси Y. Расстояния от плоскости YZ до точек пересечения траектории пули, летящей со скоростью ν параллельно оси Х, обозначены соответственно через р1, рy, рz и р2. На фиг.4 - ПС - плоскость стрельбы, образуемая поворотом относительно вертикальной оси на угол ψ, (x0, y0, z0) - координаты позиции (yp=zp=0, хp=-D), D - дальность стрельбы,  - ордината фиктивной позиции, лежащая на касательной к траектории в точке х=0. На фиг.5 изображены: приведенный эталонный сигнал uэпр(t), соответствующий эталонному сигналу uэ(t} на выходе сумматора 2 (фиг.1), формируемому при пролете пули через экран Э1 со скоростью νэ в случае выключенного источника света И2; суммарный сигнал uс(t), формируемый при пролете пули через экраны Э1, Э2 в их нижней части со скоростью νс, когда расстояние между экранами небольшое и сигналы от Э1 и Э2 накладываются друг на друга; разностный сигнал u(t)=uс(t)-uэпр(t), где uэпр(t) - приведенный к сигналу от Э1 в сумме uc(t) по амплитуде и длительности (скорости полета пули) сигнал. Приведенный эталонный сигнал соответствует сигналу при пролете пули через экран Э1, а разностный сигнал соответствует сигналу от пролета пули через экран Э2.
- ордината фиктивной позиции, лежащая на касательной к траектории в точке х=0. На фиг.5 изображены: приведенный эталонный сигнал uэпр(t), соответствующий эталонному сигналу uэ(t} на выходе сумматора 2 (фиг.1), формируемому при пролете пули через экран Э1 со скоростью νэ в случае выключенного источника света И2; суммарный сигнал uс(t), формируемый при пролете пули через экраны Э1, Э2 в их нижней части со скоростью νс, когда расстояние между экранами небольшое и сигналы от Э1 и Э2 накладываются друг на друга; разностный сигнал u(t)=uс(t)-uэпр(t), где uэпр(t) - приведенный к сигналу от Э1 в сумме uc(t) по амплитуде и длительности (скорости полета пули) сигнал. Приведенный эталонный сигнал соответствует сигналу при пролете пули через экран Э1, а разностный сигнал соответствует сигналу от пролета пули через экран Э2.
Генератор дискретных сигналов 7 служит для формирования последовательности сигналов, имитирующих сигналы датчиков и используемых при тестировании системы. Переключение сигналов, поступающих на регистратор, осуществляется с помощью селектора 3, реализованного на реле.
Математическая сущность изобретения заключается в следующем.
Зададим экран (плоскость) уравнением в следах

где a=-fgα, b=fgβ, α, β - углы наклона следов (линий пересечения с координатными плоскостями XY и XZ); r - абсцисса точки пересечения экрана с осью Х.
Зададим прямолинейную (в окрестности мишени и экранов) траекторию в параметрической форме

где (x0, y0, z0) - точка попадания в плоскости мишени (x0=0); l, m, n - направляющие косинусы траектории, равные

Здесь согласно фиг.4

где D - дальность стрельбы;  - ордината фиктивной позиции; zр - боковая координата фиктивной позиции (zp=0).
- ордината фиктивной позиции; zр - боковая координата фиктивной позиции (zp=0).
В (2) параметр р физически представляет собой расстояние вдоль траектории от точки (x0, y0, z0) - до текущей точки (х, у, z). В случае постоянной скорости p=νt и t есть время полета от точки (х, у, z) до точки (x0, y0, z0).
Из (1) и (2) для параметра р имеем
В случае идеального расположения экранов (фиг.3) и нормальной к мишени траектории расстояние между экранами Эy и Э2 пропорционально координате y0 точки попадания, расстояние между экранами Эz и Э2 пропорционально боковой (горизонтальной координате z0 точки попадания, а расстояние между параллельными экранами Э1 и Э2 равно базе L и может быть использовано для измерения средней скорости полета пули, относимой к середине базы. С учетом постоянства скорости имеем


где ky, kz - приборные коэффициенты, равные отношениям соответствующих временных интервалов.
Из (6) и (7) следует, что экран Эy является функциональным для определения y0, а Эz - для определения z0.
В случае ненормальной к плоскости мишени траектории и неидеального расположения экранов (с поворотами одновременно относительно осей Y, Z, т.е. α≠0 и β≠0) при подстановке в (6) и (7) значений р1, р2, рy, рz в соответствии с формулой общего случая (5) получим дробно-рациональные функции. С учетом того, что  ограничимся в числителях и знаменателях этих дробей линейными членами. В результате получим следующие уравнения регрессии (модель мишени)
ограничимся в числителях и знаменателях этих дробей линейными членами. В результате получим следующие уравнения регрессии (модель мишени)


Так как коэффициенты модели αi, bi, i=0, …4, неизвестны, то проведем идентификацию. Для этого сделаем n≥5 выстрелов, например, по углам и центру мишени, измерим время пересечения экранов в каждом выстреле и координаты пробоин в миллиметровой бумаге на контрольной рамке. Затем решаем системы из уравнений (8) или (9) относительно неизвестных αi, или bi.
В режиме функционирования после выстрела и измерения времен пересечения экранов будем вычислять приборные коэффициенты ky, kz и затем разрешать систему (8), (9) относительно координат.
Переписав уравнения (8), (9) в строчку, получим систему двух линейных относительно y0, z0 алгебраических уравнений, которую можно решить, например, по правилу Крамера.
Очевидно, что не при любом произвольном расположении экранов система уравнений (8), (9) разрешима. Если, например, все экраны будут параллельными, то все времена будут одинаковыми при любых y0, z0, и система неразрешима. Математически в этом случае определитель системы равен нулю и система плохо (или совсем не) обусловлена, а число обусловленности, например, по Эвклидовой норме будет равно бесконечности. Минимальное значение числа обусловленности, равное 1, будет в случае диагональной системы, когда каждое из уравнений содержит одну неизвестную, что соответствует идеальному расположению и уравнениям (6), (7).
Однако в случае небольших дальностей (до 25-50 м в зависимости от калибра пули или снаряда) при расположении экрана параллельно плоскости YZ возникает сигнал помехи, превосходящий полезный сигнал от пролетающей пули и опережающий его. Физически его появление можно объяснить следующим образом. Во время выхода пороховых газов из оси канала ствола образуется сферическая сверхзвуковая волна, радиус которой по мере распространения увеличивается. При достижении экрана волна практически плоская. Фронт волны - это скачок уплотнения, который с оптической точки зрения представляет собой линзу, искажающую ход световых лучей. Это приводит к тому, что поток от излучателя в момент пересечения фронтом волны экрана отклоняется и не попадает на фотоприемник, что эквивалентно затенению излучателя и появлению сигнала на выходе фотоприемника датчика.
Экспериментально установлено, что в случае наклона экрана на 6-8 и более градусов сигнал помехи уменьшается до допустимой величины или практически исчезает.
С целью сокращения количества датчиков и коаксиальных линий связи, с учетом необходимости наклона экранов и обеспечения обусловленности системы (приближения к параметрам идеальной схемы по методу четырех экранов) предложена схема расположения фиг.2. В схеме все экраны наклонены и расстояния от излучателей до датчиков одинаковы, что обеспечивает одинаковые сигналы. Расстояние вдоль направления стрельбы (оси Х) между экранами Э1 и Э3 или Э2 и Э4 (фиг.2) не зависит от боковой координаты z, причем в случае экранов Э1 и Э3 оно увеличивается с увеличением y0, а в случае экранов Э2 и Э4, наоборот, уменьшается. Аналогично расстояние между экранами Э1 и Э4 или Э2 и Э3 не зависит от вертикальной координаты y, причем в случае экранов Э1 и Э4 оно уменьшается с увеличением z0, а в случае Э2 и Э3, наоборот, увеличивается. Наконец, разница средних расстояний между экранами Э1, Э2 и Э3, Э4 постоянна и равна базе L. Таким образом, отмеченные расстояния соответствуют идеальной схеме фиг.3. С учетом противоположных зависимостей расстояний от координат, отмеченных выше, и для усреднения погрешностей измерения времен целесообразно использовать следующие приборные коэффициенты в уравнениях (8), (9)


Так как при большом расстоянии между экранами пар (между Э1, и Э2 или Э3 и Э4) изображения излучателей не проецируются оптическими системами на чувствительные площадки фотоприемников датчиков, то их необходимо располагать ближе друг к другу. В этом случае при пролете пули в области их наибольшего сближения (для экранов Э1, Э2 - внизу, а для Э3, Э4 - вверху, фиг.2) сигналы от экранов на выходе аналогового сумматора 2 (фиг.1) накладываются друг на друга и необходимо из суммарного сигнала uс(t)=u1(t)+u2(t) выделить сигнал u2(t) от второго по направлению полета пули экрана. Алгоритм выделения второго сигнала u2(t) заключается в следующем. Предварительно при отключенных излучателях И2 и И4 регистрируют сигналы uэ(t) от первых экранов Э1 и Э3, а затем осуществляют их цифровую обработку (сглаживание) в компьютере 5. По каждому эталонному сигналу определяют амплитуду uэm и длительность положительного импульса τэ (по уровню 0,1 uэm). В режиме функционирования при всех включенных излучателях во время выстрела регистрируют суммарные сигналы uc(t) и после их цифровой обработки (сглаживания) по тому же алгоритму, что и для эталонного сигнала) определяют амплитуду u1m первого положительного импульса и его длительность τ1, (по уровню 0,1 u1m). Затем эталонный сигнал приводят к каждому суммарному сигналу путем изменения масштаба по амплитуде и длительности, т.е.

Вычитая из суммарного сигнала приведенный эталонный, предварительно смещенный до совпадения первых положительных импульсов суммарного и приведенного эталонного сигналов, находят сигнал от второго экрана

Система работает следующим образом.
Предварительно в цифровом запоминающем осциллографе задается задержка запуска Qз и длина после записи Qп, в сумме не превышающие объема кольцевого буфера Q≥Qз+Qп.
Период дискретизации определяется скоростью пули VD на дальности стрельбы D, длиной блокируемого экранами участка траектории Lбл и объемом буфера
Скорость берется с некоторым занижением по сравнению с предполагаемой. Затем находится частота дискретизации  МГц.
МГц.
В режиме идентификации для формирования эталонных сигналов, соответствующих экранам Э1 и Э3, выключают питание источников света И2 и И4, запускают осциллограф и производят выстрел по центру мишени.
После выстрела пуля последовательно пересекает световые экраны. При пересечении каждого светового экрана часть светового потока, падающего от источника света на фотоприемник оптико-электронного преобразователя, затеняется, и на выходе оптико-электронного преобразователя формируется электрический сигнал, который по коаксиальной линии связи 1 поступает на вход схемы суммирования сигналов 2, а с ее выхода - через селектор 3 на вход записи осциллографа 4. По сигналу, формируемому при достижении первым сигналом порогового уровня, начинается запись информации из буфера в компьютер, начиная с предыстории на Qз. После достижения Qп регистрация заканчивается и производится запись информации, т.е. эталонных сигналов, соответствующих первым экранам пар, с кольцевого буфера в компьютер 5. Затем непосредственно за отсчетным световым экраном Э4 устанавливают контрольную рамку с наклеенной на нее миллиметровой бумагой, включают питание всех источников света и аналогично регистрируют сигналы, соответствующие нескольким (2-3) выстрелам по углам и центру мишени. При этом после каждого выстрела отмечают номер очередной пробоины на миллиметровой бумаге, а после всей серии выстрелов контрольную рамку убирают, на миллиметровой бумаге измеряют координаты всех пробоин, заносят их в компьютер, вызывают программу обработки результатов и определения коэффициентов регрессии αi и bi, также параметров эталонных сигналов (амплитуды и длительности).
В режиме функционирования (рабочий режим) аппаратура работает аналогично режиму идентификации. После выстрела и записи в память компьютера моментов времени пересечения пулей световых экранов производится фильтрация сигналов, определение амплитуды и длительности первых импульсов суммарных сигналов от первой и второй пар экранов, приведение эталонных сигналов по амплитуде и длительности к суммарным сигналам, определение (путем вычитания приведенных эталонных из суммарных сигналов) сигналов от вторых экранов пар. Теперь по выделенным сигналам определяют времена пересечения (по достижению порогового уровня) каждого из экранов, по формулам (10), (11) вычисляют приборные коэффициенты ky, kz, из системы уравнений (8), (9) вычисляют координаты точек попадания y0, z0 и по формуле (12) - среднюю скорость νcp. После определения координат в серии выстрелов определяют характеристики меткости и кучности стрельбы, среднее значение и среднеквадратичное отклонение скорости в серии. Результаты вычислений выводят на монитор. При необходимости по запросу оператора на монитор выводится сетка координат мишени с отмеченными пробоинами и их номерами в последовательности выстрелов.
Предложенная световая мишень по сравнению с прототипом более проста по конструкции, имеет меньшее количество датчиков и коаксиальных линий связи и более высокую точность благодаря цифровой обработке сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТИР | 2008 |
|
RU2388990C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ В СОВМЕЩЕННОЙ С БАЛЛИСТИЧЕСКОЙ ТРАССОЙ ИНВАРИАНТНОЙ СВЕТОВОЙ МИШЕНИ | 2008 |
|
RU2388991C2 |
| СВЕТОВАЯ МИШЕНЬ | 2002 |
|
RU2213320C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ МЕТАТЕЛЬНОГО ЭЛЕМЕНТА С ПОМОЩЬЮ СВЕТОВЫХ ЭКРАНОВ | 2005 |
|
RU2279035C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ МЕТАТЕЛЬНОГО ЭЛЕМЕНТА С ПОМОЩЬЮ ФОТОЛИНЕЕК И СВЕТОВЫХ ЭКРАНОВ | 2005 |
|
RU2278388C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ МОМЕНТА ПЕРЕСЕЧЕНИЯ ПУЛЕЙ СВЕТОВОГО ЭКРАНА МИШЕНИ | 2008 |
|
RU2386100C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СТРЕЛКОВЫЙ ТРЕНАЖЕР КОЛЛЕКТИВНОГО БОЯ | 2002 |
|
RU2211433C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ МИШЕНЬ СТРЕЛКОВОГО ТРЕНАЖЕРА | 1999 |
|
RU2147112C1 |
| СОЛНЕЧНЫЙ ИНТЕРФЕРОМЕТР КОГЕРЕНТНОСТИ С РАССЕИВАЮЩЕЙ ЛИНЗОЙ | 2009 |
|
RU2410641C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ХАРАКТЕРИСТИК ПОЛЕТА ПУЛЬ И СНАРЯДОВ | 2002 |
|
RU2231738C2 |
Изобретение относится к мишеням для определения внешне баллистических параметров (координат, скорости) пуль и снарядов при стрельбе прямой наводкой по вертикальным преградам (мишеням). Технический результат - упрощение конструкции и повышение точности. Сущность изобретения заключается в том, что источники света объединены в две пары, источники света каждой пары установлены V-образно, причем в одной паре они развалены относительно оси симметрии на одинаковые и противоположные по знаку острые углы сверху, а в другой паре - снизу. Напротив оси симметрии каждой пары источников света установлен оптико-электронный преобразователь, выходы преобразователей соединены с входами сумматора аналоговых сигналов коаксиальными линиями связи, выход сумматора соединен с входом селектора, выход селектора соединен с входом цифрового запоминающего осциллографа, а выход последнего - с входом компьютера. Выходы компьютера соединены с управляющими входами генератора дискретных (тестовых) сигналов и селектора. 5 ил.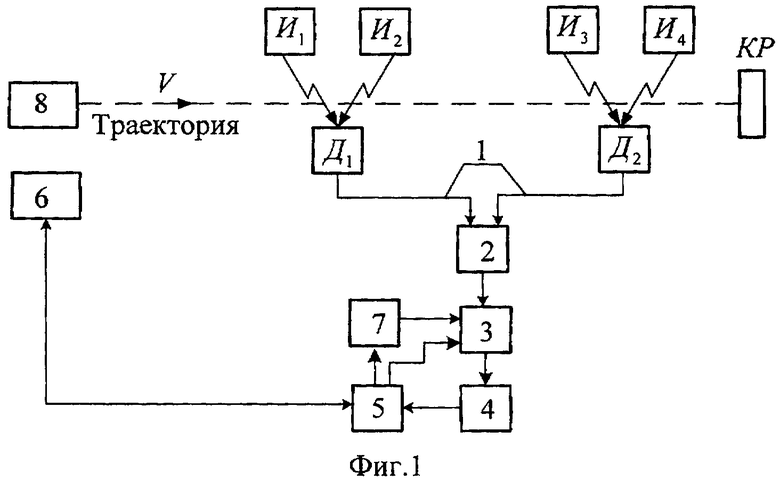
Световая мишень с оптико-электронным регистрирующим устройством, содержащая источники света, расположенные по одну сторону от снопа траекторий, и оптико-электронные преобразователи, расположенные по другую сторону от снопа траекторий и образующие совместно с источниками света систему световых экранов, коаксиальные линии связи, компьютер с устройством отображения информации в виде монитора, отличающаяся тем, что она снабжена сумматором аналоговых сигналов, селектором, цифровым запоминающим осциллографом, генератором тестовых сигналов, при этом источники света объединены в две пары и в каждой паре установлены V-образно, причем в одной паре они развалены относительно оси симметрии на одинаковые и противоположные по знаку острые углы сверху, а в другой паре - снизу, напротив оси симметрии каждой пары источников света установлен оптико-электронный преобразователь, выходы преобразователей соединены с входами сумматора аналоговых сигналов коаксиальными линиями связи, выход которого соединен с входом селектора, выход селектора соединен с входом цифрового запоминающего осциллографа, а выход последнего - с входом компьютера, выходы которого соединены с управляющими входами генератора тестовых сигналов и селектора.
| СВЕТОВАЯ МИШЕНЬ | 2002 |
|
RU2213320C1 |
| US 3487226 A, 30.12.1969 | |||
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ РЕЗУЛЬТАТОВ СТРЕЛЬБЫ ПРИ ОПРЕДЕЛЕНИИ КООРДИНАТ ПРОЛЕТА ПУЛИ | 1992 |
|
RU2068538C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2268239C2 |
| DE 3705142 A1, 01.09.1988. | |||

