Изобретение относится к мишеням для определения внешнебаллистических характеристик полета пуль и снарядов и может быть использовано при экспериментальном определении меткости и кучности стрельбы и приведении оружия к нормальному бою, при определении скорости.
Известна электронно-акустическая мишень [1], содержащая квадратную или прямоугольную плиту с расположенными по центрам каждой из ее сторон акустическими датчиками, с помощью которых фиксируются моменты времени прихода звуковой волны от места удара пули по плите до мест расположения акустических датчиков.
Известен стрелковый тир [2], в котором для регистрации координат пуль содержится мишенная панель, выполненная в виде пуленепробиваемого экрана с встроенными акустическими датчиками, фиксирующими время прихода звуковой волны до датчиков от места ее возникновения - точки попадания пули в экран.
Недостатками электронно-акустической мишени и стрелкового тира являются малые размеры поля регистрации, в частности, из-за примитивных алгоритмов определения координат, основанных на допущении малого поля регистрации, износ и разрушение со временем плиты или пуленепробиваемого экрана и невозможность по этим причинам регистрировать координаты снарядов.
Наиболее близким аналогом является устройство для определения внешнебаллистических характеристик полета пуль и снарядов [3], содержащее четыре акустических датчика, расположенных на одной прямой. В отличие от предыдущих устройств данное устройство не содержит плиты или пуленепробиваемый экран и потому применимо для определения координат не только пуль, но и снарядов.
Недостатком устройства является низкая точность из-за влияния ветра в случае использования устройства на открытой местности. Потому возможна работа только в тихую безветренную погоду, что бывает крайне редко. Кроме того, нельзя обеспечить высокой точности даже в тихую безветренную погоду на большом поле регистрации из-за большой погрешности угломерного базового метода косвенных измерений, когда направления лучей, проходящих от датчиков к точке попадания в мнимую плоскость регистрации, далеки от нормальных (перпендикулярных) по отношению друг к другу.
Для уменьшения погрешности угломерного базового метода косвенных измерений можно расположить датчики не по прямой, а аналогично устройству (2) и увеличить количество датчиков, расположив их, например, по сторонам мишени. При этом их расположение должно быть задано (измерено) с точностью, в несколько раз превышающей точность измерения внешнебаллистических характеристик. Однако в случае большого поля мишени и расположения датчиков на большом удалении друг от друга (до 4-6 м по противоположным сторонам от мишени) задать или измерить непосредственно координаты датчиков с высокой точностью (до долей мм) не представляется возможным.
Задача изобретения заключается в устранении недостатков устройства для определения внешнебаллистических характеристик полета пуль и снарядов путем создания способа определения внешнебаллистических характеристик полета пуль и снарядов, включающего фиксацию моментов времени прохождения фронта звуковой волны через акустические датчики, установленные на мишени в количестве не менее количества неизвестных в регрессионной или математической модели (начало отсчета времени, соответствующего моменту пролета пули или снаряда через плоскость мишени, скорости пули или снаряда, углов наклона их траектории и величины и направления ветра), и вычисление координат полета пуль или снарядов через плоскости мишени с помощью регрессионной или математической модели, при этом для определения положения датчиков осуществляют идентификацию модели, для чего предварительно на мишень устанавливают контрольную рамку и производят по ней серию выстрелов в разные точки, причем для каждого выстрела измеряют время срабатывания датчиков и координаты пробоин в контрольной рамке, а затем определяют координаты датчиков, например, по методу наименьших квадратов при количестве уравнений, превышающем количество неизвестных.
Технический результат - повышение точности измерения координат и скорости, увеличение размеров поля регистрации и возможность работы на открытой местности при наличии ветра.
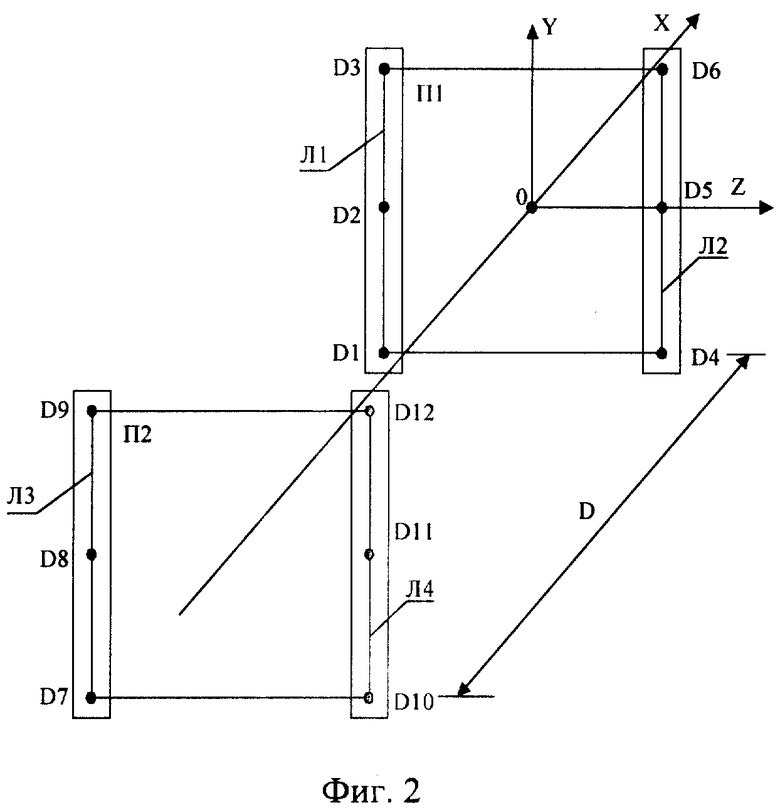
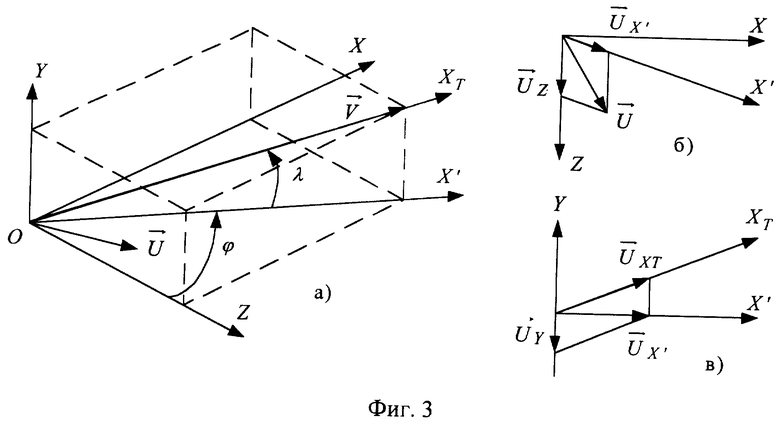
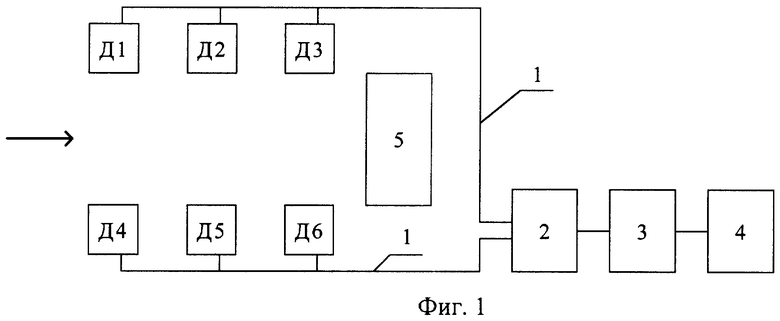
На фиг.1 изображена схема устройства для определения внешнебаллистических характеристик полета пуль и снарядов. На фиг.2 изображена пространственная схема расположения 12 акустических датчиков. На фиг.3 показаны вектор скорости пули или снаряда  вектор ветра
вектор ветра  и его разложение в базисе XTYZ, где ось ХT совпадает с вектором скорости
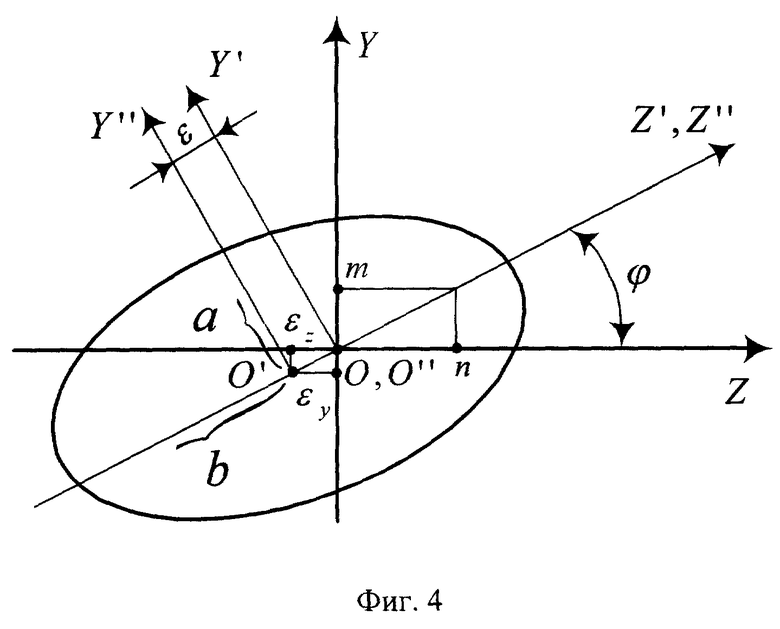
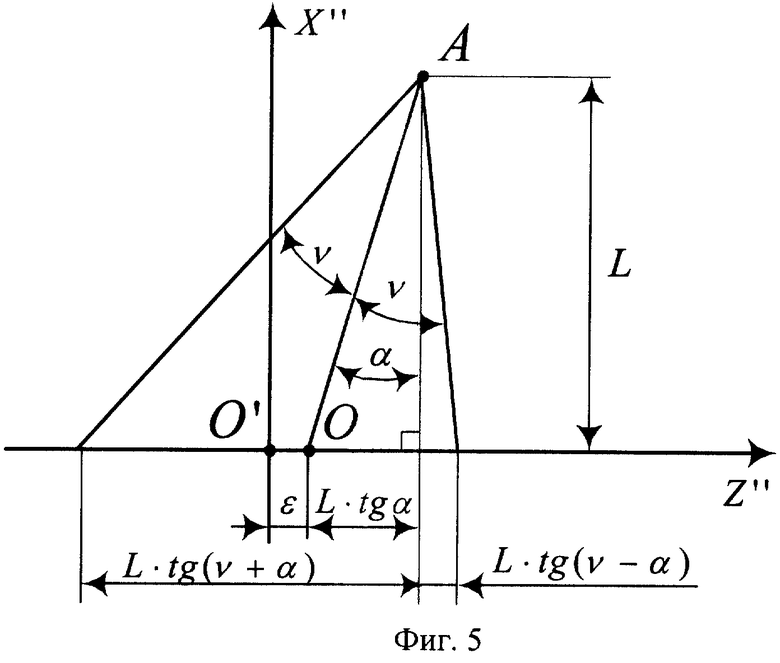
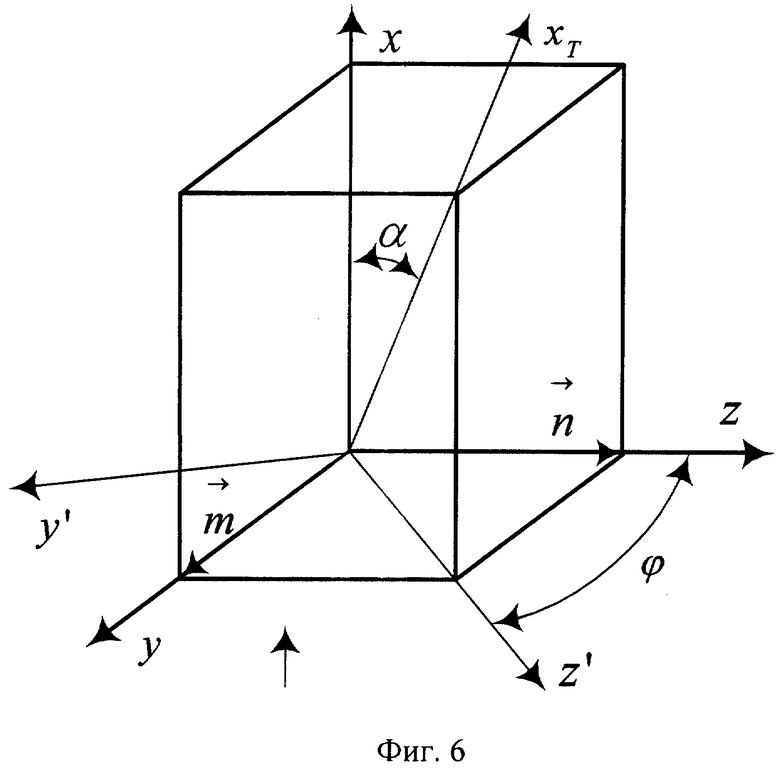
и его разложение в базисе XTYZ, где ось ХT совпадает с вектором скорости  ось Y вертикальна, а ось Z лежит в горизонтальной плоскости. Ось Х - продольная ось (по направлению стрельбы). На фиг.4 изображено сечение конуса звуковой волны плоскостью мишени, а на фиг.5 - сечение конуса звуковой волны плоскостью, проходящей через ось конуса, и нормальной плоскости мишени YZ. Фиг.6 иллюстрирует направление главных осей эллипса, фиг.7 иллюстрирует получение модели с учетом ветра и наклона траектории.
ось Y вертикальна, а ось Z лежит в горизонтальной плоскости. Ось Х - продольная ось (по направлению стрельбы). На фиг.4 изображено сечение конуса звуковой волны плоскостью мишени, а на фиг.5 - сечение конуса звуковой волны плоскостью, проходящей через ось конуса, и нормальной плоскости мишени YZ. Фиг.6 иллюстрирует направление главных осей эллипса, фиг.7 иллюстрирует получение модели с учетом ветра и наклона траектории.
Устройство (фиг.1) содержит акустические датчики Дi, i=1...6, расположенные в одной плоскости по три слева и справа от снопа траекторий (фиг.2), коаксиальные линии связи 1, блок согласующих и пороговых устройств 2, вычислитель 3, монитор для отображения результатов 4 и контрольную рамку 5 с мишенью для идентификации регрессионной модели. В случае точного измерения скорости в схему фиг.1 вводятся еще шесть датчиков Дi, i=7...12, расположенных аналогично предыдущим датчикам, но в другой плоскости, параллельно плоскости мишени (фиг.2).
Вектор скорости ветра  разложен по направлению полета пули или снаряда (ось XT) и по вертикальной Х и горизонтальной Z осям системы координат мишени (фиг.3). Продольная составляющая
разложен по направлению полета пули или снаряда (ось XT) и по вертикальной Х и горизонтальной Z осям системы координат мишени (фиг.3). Продольная составляющая  приводит к изменению положения центра возмущения атмосферы пулей или снарядом вдоль траектории и соответственно к изменению угла конуса Маха. Составляющие
приводит к изменению положения центра возмущения атмосферы пулей или снарядом вдоль траектории и соответственно к изменению угла конуса Маха. Составляющие 
 приводят к поперечному сносу конуса Маха. В сечении конуса плоскостью мишени образуется эллипс (фиг.4, 5). Полуоси эллипса а, b и смещение центра эллипса ε определяются из геометрических соображений согласно фиг.3-6 следующими выражениями
приводят к поперечному сносу конуса Маха. В сечении конуса плоскостью мишени образуется эллипс (фиг.4, 5). Полуоси эллипса а, b и смещение центра эллипса ε определяются из геометрических соображений согласно фиг.3-6 следующими выражениями


где 
 - число Маха, с - скорость звука.
- число Маха, с - скорость звука.
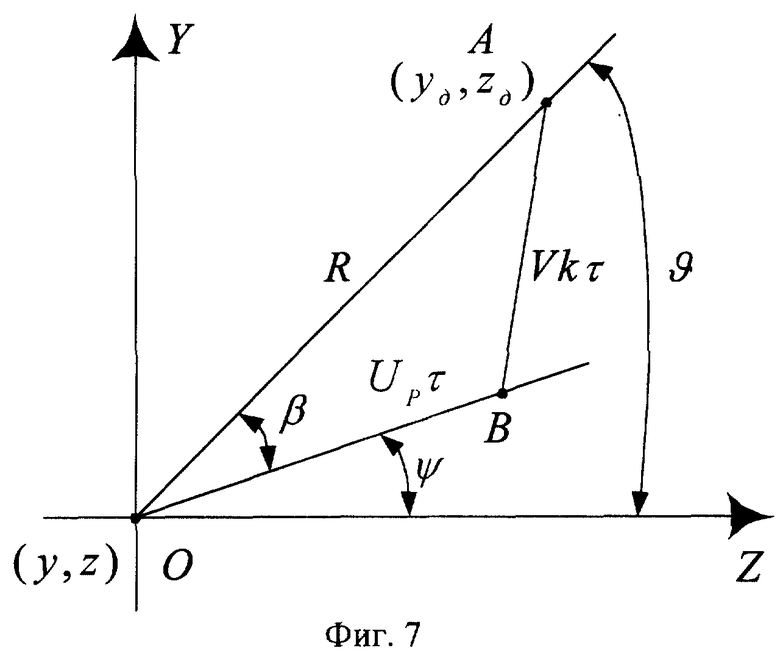
Составляющие UY и UZ приводят к параллельному переносу центра возмущения и соответственно всего эллипса вдоль осей Y, Z на расстояния, пропорциональные времени τ =t-t0, т.е. на UYτи UZτ, где t0 - начало отсчета времени (момента пролета пули через плоскость мишени). Для угла α ≤ 0,1 рад. отношение полуосей эллипса  не превышает величины 0.99998 и, следовательно, эллипс практически является окружностью, радиус R которой пропорционален времени τ , т.е. R=Vkτ, где Vk - скорость распространения фронта волны в плоскости мишени. Согласно (2) смещение ε также пропорционально времени τ , так как L=Vτ . Суммируя векторы
не превышает величины 0.99998 и, следовательно, эллипс практически является окружностью, радиус R которой пропорционален времени τ , т.е. R=Vkτ, где Vk - скорость распространения фронта волны в плоскости мишени. Согласно (2) смещение ε также пропорционально времени τ , так как L=Vτ . Суммируя векторы 

 получим результирующий вектор
получим результирующий вектор  направленный под углом ψ , как показано на фиг.7. Эвклидово расстояние между точками попадания (y,z) и датчика (y∂ ,z∂ ) равно
направленный под углом ψ , как показано на фиг.7. Эвклидово расстояние между точками попадания (y,z) и датчика (y∂ ,z∂ ) равно

Из Δ АВО имеем

откуда с учетом (4) следует модель акустической мишени

Здесь угол при вершине О треугольника АВО соответствует разности углов ϑ и ψ на фиг.7, причем 0≤ β ≤ π . Поэтому
Угол ϑ определяется положением датчика (y∂ ,z∂ ) относительно точки попадания (у,z) и равен

где 
Если датчики расположены слева и справа от поля регистрации, то  и проблемы деления на нуль в (8) и (9) не возникает. В противном случае надо проверять выполнение условия
и проблемы деления на нуль в (8) и (9) не возникает. В противном случае надо проверять выполнение условия  и поступать соответствующим образом (принимать при условии
и поступать соответствующим образом (принимать при условии 
 где δ - малая положительная величина).
где δ - малая положительная величина).
Таким образом, в модели (6) содержится 6 неизвестных Vk, Up, ψ , t0, y, z и для их определения необходимо минимум 6 уравнений, т.е. соответственно 6 акустических датчиков с известными координатами yi, zi положения датчиков в пространстве.
В случае 12 датчиков, расположенных в двух плоскостях на расстоянии D (фиг.2), переменные Vk, Up, ψ одинаковы и в системе уравнений содержится 9 неизвестных Vk, Up, ψ , t01, y1, z1, t02, y2, z2 при 12 уравнениях, которые можно решать по методу наименьших квадратов. По определенным t02, t01 вычисляется горизонтальная скорость пули или снаряда
Акустическая мишень по существу является системой косвенных измерений, в которой по первичным измерениям, т.е. по временам встречи звуковой волны с акустическими датчиками решается обратная задача внешней баллистики, т.е. по модели (уравнениям) вычисляются координаты и скорость. Чтобы вычислить координаты с заданной точностью, необходимо задать или измерить координаты y∂ i, z∂ i положения акустических датчиков относительно системы координат мишени с меньшими погрешностями. Это практически невозможно, тем более, что моменты времени прохождения фронта звуковой волны через датчик фиксируются по моментам времени превышения сигналов уровня порога порогового устройства. Поэтому единственным средством представляется идентификация физической или регрессионной модели по результатам серии выстрелов, когда для каждого выстрела системой фиксируются времена ti и параллельно измеряются координаты пробоин в мишени на контрольной рамке 5 (фиг.1), которая устанавливается только для идентификации, а во время функционирования акустической мишени в режиме определения координат и скорости отсутствует (снимается). Так как параметров положения - координат датчиков много, то для идентификации физической модели (6) требуется большое количество выстрелов. При этом при каждом выстреле Vk, Up, ψ , t0 также будут входить в число неизвестных. Поэтому используется следующий подход. В случае использования в модели (6) значений z∂ i, z∂ i, известных с точностью до погрешностей их непосредственного измерения, при вычислениях координат точки попадания y, z возникают погрешности, которые мало изменяются при измерении внешнебаллистических параметров пули или снаряда (углов наклона траектории, скорости), а также ветра. Поэтому используется регрессионная модель для поправок, например, в виде полного полинома степени 2


В каждом уравнении содержится 6 неизвестных коэффициентов и необходимо произвести минимум 6 выстрелов или, например, 9 выстрелов по углам, центру мишени и по "звездным" точкам, т.е. по осям координат на границах мишени. В уравнениях (11) при идентификации y, z - координаты, определенные с помощью модели (6) при измеренных координатах датчиков, Δ y=y0-y, Δ z=z0-z, где y0, z0 - измеренные по пробоинам в мишени координаты точек попадания. В процессе функционирования в рабочем режиме координаты точек попадания определяют в 3 этапа. Сначала по модели (6) определяют y, z, а затем по модели (11) определяют поправки Δ y, Δ z и, наконец, определяют 
Устройство для определения внешнебаллистических характеристик полета пуль и снарядов работает следующим образом. В режиме идентификации за второй плоскостью с датчиками (в случае 12 датчиков в двух плоскостях) или за плоскостью датчиков (в случае 6 датчиков в одной плоскости) устанавливают контрольную рамку 5 с наклеенной на нее миллиметровой бумагой. После выстрела фронт звуковой волны конуса Маха последовательно (в порядке, зависящем от координат почти попадания) пересекает акустические датчики и на их выходах образуются электрические сигналы, которые по коаксиальным линиям связи 1 поступают на вход блока согласующих и пороговых устройств 2. С выхода блока 2 сигналы поступают на шину прерывания вычислителя 3. По сигналам прерывания фиксируется состояние таймера вычислителя (компьютера) и коды времени и датчиков, которым соответствуют коды времени, записываются в память компьютера. После производства серии выстрелов в заданные точки контрольной рамки 5 или после каждого выстрела измеряют координаты пробоин (и отмечают их во избежание перепутывания) и вводят их в вычислитель. После заданного числа выстрелов по программе, например по методу наименьших квадратов, проводят идентификацию моделей (11). При этом вычисляют для контроля суммы квадратов невязок и невязки для каждого выстрела. Выстрелы с большими невязками бракуют и производят либо дострел, либо бракованные точки просто исключают и повторяют определение коэффициентов моделей.
В режиме функционирования (рабочий режим) аппаратура работает аналогично режиму идентификации. После выстрела и записи в память вычислителя моментов времени пересечения фронтом звуковой волны датчиков по программе по модели (6) находят предварительные координаты y, z, затем по программе по модели (11) с коэффициентами ai, bi, найденными при идентификации, определяют поправки Δ y, Δ z и, наконец, по (12) производят уточнение координат точки попадания. В случае необходимости координаты каждой пробоины или среднюю точку попадания, характеристики рассеивания (срединные отклонения, круги R50, R80, R100, поперечник рассеивания) выводят на монитор 4. В случае 12 датчиков по (10) определяют горизонтальную скорость пули или снаряда.
Предложенное устройство имеет большое поле регистрации (до 2× 3 м2), высокую точность измерении координат и скорости полета пуль и снарядов, обеспечивает высокую точность измерения на открытой местности при наличии ветра.
Источники информации
1. Захаров В.А. Электронно-акустическая мишень. М.: Радио, 1975, №5, с.13-15.
2. Стрелковый тир. Заявка №94043628, 1996 г., F 41 J 5/056. Заявители: Захаров В.Н., Ромашкин В.В., Рублев Н.Н., Смирнов Н.И.
3. Устройство для определения внешнебаллистических характеристик полета пуль и снарядов. Заявка №93015148/23 от 1993.03.23, F 41 J 5/04. Дата публикации формулы изобретения 1995.09.20. Автор Вьюков Н.Н. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ НА ОСНОВЕ АКУСТИЧЕСКИХ ДАТЧИКОВ | 2008 |
|
RU2392577C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОЛОЖЕНИЯ В ПРОСТРАНСТВЕ И ВО ВРЕМЕНИ ПУЛЬ И СНАРЯДОВ | 2011 |
|
RU2470252C1 |
| СВЕТОВАЯ МИШЕНЬ | 2002 |
|
RU2213320C1 |
| ТИР | 2008 |
|
RU2388990C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ МЕТАТЕЛЬНОГО ЭЛЕМЕНТА С ПОМОЩЬЮ СВЕТОВЫХ ЭКРАНОВ | 2005 |
|
RU2279035C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ В СОВМЕЩЕННОЙ С БАЛЛИСТИЧЕСКОЙ ТРАССОЙ ИНВАРИАНТНОЙ СВЕТОВОЙ МИШЕНИ | 2008 |
|
RU2388991C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ МЕТАТЕЛЬНОГО ЭЛЕМЕНТА С ПОМОЩЬЮ ФОТОЛИНЕЕК И СВЕТОВЫХ ЭКРАНОВ | 2005 |
|
RU2278388C1 |
| СВЕТОВАЯ МИШЕНЬ | 2008 |
|
RU2378605C1 |
| СПОСОБ РЕГИСТРАЦИИ КООРДИНАТ ПОПАДАНИЯ ПО МИШЕНИ И АКУСТИЧЕСКАЯ ЭЛЕКТРОННАЯ МИШЕНЬ | 2024 |
|
RU2832398C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОПАДАНИЯ ПУЛЬ | 2008 |
|
RU2367885C1 |
Изобретение относится к средствам для проверки и тренировки в прицеливании. Реализация изобретения позволяет повысить точность измерений координат и скорости полета пуль и снарядов, в том числе на открытой местности. Сущность изобретения заключается в том, что фиксируют моменты времени прохождения фронта звуковой волны через акустические датчики, установленные на мишени в количестве не менее шести, и вычисляют характеристики по регрессионной или математической модели мишени с помощью вычислителя. Число датчиков выбирают по минимальному количеству неизвестных в регрессионной или математической модели, которыми являются начало отсчета времени, соответствующее моменту пролета пули или снаряда через плоскость мишени, скорость пули или снаряда, углы наклона их траектории и величину и направление силы ветра. Для определения положения датчиков осуществляют идентификацию модели, для чего предварительно на мишень устанавливают контрольную рамку и производят по ней серию выстрелов в заданные точки. После каждого выстрела измеряют время срабатывания датчиков и координаты пробоин в контрольной рамке, а затем по методу наименьших квадратов определяют координаты датчиков. 7 ил.
Способ определения внешнебаллистических характеристик полета пуль и снарядов, включающий фиксацию моментов времени прохождения фронта звуковой волны через акустические датчики, установленные на мишени в количестве не менее шести, и вычисление характеристик по регрессионной или математической модели мишени с помощью вычислителя, отличающийся тем, что число датчиков выбирают по минимальному количеству неизвестных в регрессионной или математической модели, которыми являются начало отсчета времени, соответствующее моменту пролета пули или снаряда через плоскость мишени, скорость пули или снаряда, углы наклона их траектории и величину и направление силы ветра, при этом для определения положения датчиков осуществляют идентификацию модели, для чего предварительно на мишень устанавливают контрольную рамку и производят серию выстрелов в заданные точки, причем после каждого выстрела измеряют время срабатывания датчиков и координаты пробоин в контрольной рамке, а затем по методу наименьших квадратов определяют координаты датчиков.
| Цифровой демодулятор частотно-манипулированных сигналов | 1982 |
|
SU1058083A1 |
| RU 93015148 A1, 20.09.1995 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОЩАДИ СЛЕДА СТРУИ АБРАЗИВА | 1999 |
|
RU2171173C2 |
| DE 3412326 A1, 31.10.1990 | |||
| RU 2138309 C1, 27.09.1999 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА ИЗВЕСТНЫХ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ | 1993 |
|
RU2078353C1 |
| US 4261579 А, 14.04.1981 | |||
| ОБОЛОЧКА, ПРИДАЮЩАЯ ЦВЕТ ФОРМОВАННЫМ В ОБОЛОЧКУ МЯСНЫМ ПРОДУКТАМ, И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2007 |
|
RU2442424C2 |
| ШТАММ ГИБРИДНЫХ КУЛЬТИВИРУЕМЫХ КЛЕТОК ЖИВОТНЫХ Mus musculus 2E4 - ПРОДУЦЕНТ МОНОКЛОНАЛЬНЫХ АНТИТЕЛ, СПЕЦИФИЧНЫХ К БЕЛКУ ТЕПЛОВОГО ШОКА 70 | 2008 |
|
RU2381271C1 |
| DE 3914179 A1, 31.10.1990 | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |

