Область техники
Изобретение относится к способу проведения геодезических измерений для здания, подлежащего возведению и, более конкретно, для высотного здания, согласно вводной части п.1 формулы изобретения, а также к системе для координатного преобразования для привязки и согласования, по меньшей мере, одного геодезического измерительного инструмента согласно преамбуле п.7 формулы изобретения.
В предшествующем уровне техники известны различные технологии и устройства для геодезических измерений, используемые во время возведения и после возведения высотных зданий. Высотные здания подвергаются сильным внешним наклоняющим воздействиям, вызванным, например, ветровой нагрузкой, температурными воздействиями от солнечного нагрева и односторонних нагрузок. Такие воздействия являются особенно проблематичными в фазе строительства высотного здания, поскольку высотное здание в процессе строительства также подвергается наклоняющим воздействиям и должно, по меньшей мере, терять свое, как правило, строго вертикальное осевое направление. При этом строительство должно продолжаться таким образом, чтобы здание имело проектное осевое направление, особенно по вертикали, при возвращении в не наклоненное исходное состояние.
Важно, чтобы элемент был сконструирован прямым, чтобы теоретически, даже при перемещении около проектной центральной точки вследствие варьирующихся нагрузок, он мог иметь вертикальное осевое направление, когда все условия смещения нейтрализуются. По причине дифференциальной осадки ростверка, дифференциальной усадки цемента и наличия конструктивных допусков эта воображаемая ситуация должна редко достигаться.
По этой причине требуется регулярное согласование системы отсчета для геодезических измерений на этапе строительства высотного здания, после достижения некоторой высоты или соотношения высоты и поперечного сечения.
До настоящего времени геодезические измерения на высотных зданиях выполняются с помощью геодезических электронно-оптических автоматических тахеометров, тахеометров, или теодолитов, проводящих бесконтактные оптические измерения точек, подлежащих геодезическим измерениям, эти инструменты периодически привязываются к внешним опорным точкам с известными координатами.
Автоматические тахеометры либо корректируют угол наклона посредством инклинометров, или вводят поправку измеренного угла наклона математически. За пределами некоторых пороговых значений или при условиях чрезмерных случайных изменений угла наклона такая корректировка или подавление становятся невозможными.
Общая точность технологии проведения геодезических измерений зависит от опорных точек, служащих реперами для автоматического тахеометра; поэтому выбираются такие точки, для которых гарантируется абсолютная неизменность их положения. В первую очередь, это точки, близкие к поверхности земли, которые не подвергаются смещающим воздействиям. Однако увеличивающиеся высоты строительства, усугубленные плотной окружающей застройкой, вызывают растущие трудности в использовании реперов на поверхности земли ввиду того, что расстояние между автоматическим тахеометром, установленным на самом верхнем уровне высотного здания, и опорной точкой становится чрезмерным для точной привязки автоматического тахеометра, в то время как сравнительные расстояния между реперами становятся слишком малы, особенно в сильно развитых зонах. За пределами некоторой пороговой высоты становится также невозможным использовать опорные точки на поверхности земли. В особенности на Дальнем Востоке возрастает спрос на высотные здания, имеющие высоту за пределами пороговой и соотношение высоты к поперечному сечению такое, при котором растет угол наклона и раскачивание здания.
Сильные перемещения каркаса создают ряд проблем для правильного проектирования управляющих устройств. Должно быть важным точно знать в каждый конкретный момент времени, насколько здание отклонено от проектного положения, и в то же время знать точное положение автоматического тахеометра. Ситуация дополнительно усложняется вибрациями в здании вследствие проведения строительных работ и перемещениями здания, делающими трудным, если вообще возможным, выдерживать инструменты выставленными горизонтально.
Поэтому задачей изобретения является решение этих проблем и создание точной и надежной технологии геодезических измерений для каркаса почти любой высоты, подлежащего возведению, и особенно для высотных зданий, подвергаемых наклоняющему воздействию и с затрудненным использованием опорных точек на поверхности земли.
Эта задача решается путем осуществления отличительных признаков, изложенных в независимых пунктах формулы изобретения. Признаки, развивающие изобретения альтернативным или преимущественным путем, можно видеть в зависимых пунктах формулы изобретения.
Ниже излагается, в общем и с подробностями, способ и система изобретения исключительно в качестве примеров и специфических вариантов осуществления, представленных в виде схем на чертежах. Более конкретно:
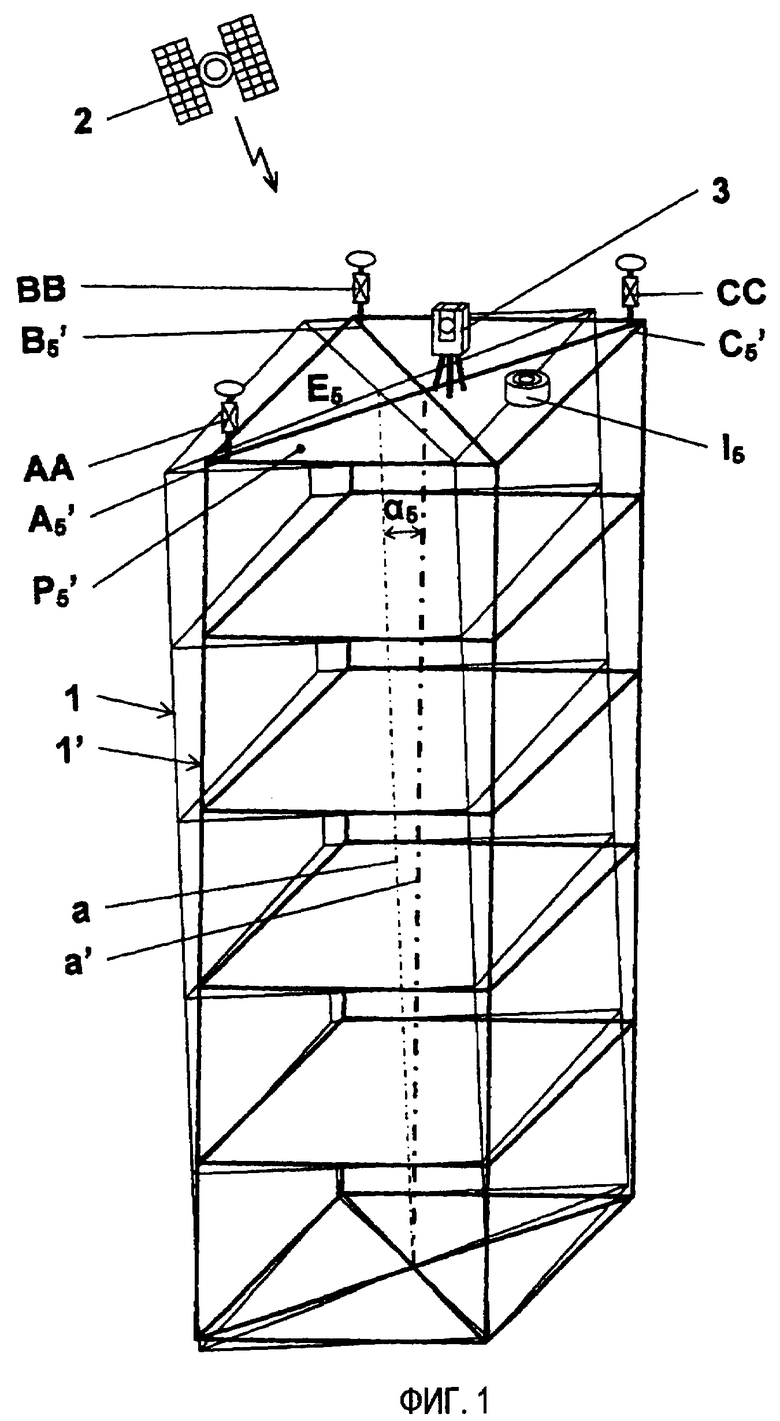
на фиг.1 показан частично возведенный каркас в наклоненном состоянии с прямой реальной линией относительно не наклоненного каркаса с прямой воображаемой осью, имеющий геодезическое устройство согласно изобретению; и
на фиг.2 показан частично возведенный каркас в наклоненном состоянии с искривленной реальной линией, смоделированной за пределами самого верхнего уровня каркаса, подлежащего возведению.
На фиг.1 показан каркас 1', то есть частично воздвигнутое здание в реальном наклоненном состоянии, имеющий реальную прямую линию а' относительно теоретического не наклоненного каркаса 1, имеющего воображаемую ось а, в то время как на фиг.2 показан каркас 1' в наклоненном состоянии, имеющий реальную искривленную линию а′, смоделированную за пределами самого верхнего уровня Е5 для каркаса 1′′, который подлежит возведению. Ниже фиг.1 и 2 описываются вместе.
Изобретение основывается на использовании, по меньшей мере, трех приемников АА, ВВ, СС спутниковой системы 2 глобального позиционирования для определения положений трех опорных точек А5′, В5′, С5′, а более конкретно, опорных точек, оборудованных отражателями на текущем верхнем уровне Е5 конструкции не наклоненного каркаса 1 или наклоненного каркаса 1' в фазе возведения, который располагается в зоне приема сигналов со спутников. Например, каждый приемник АА, ВВ, СС установлен на шесте, имеющем отражатель и размещенном на опорной точке А5′, В5′, С5' соответственно. Особенно подходящей спутниковой системой позиционирования является GPS, предпочтительно скомбинированная с использованием данных поправок координационной станции, улучшающей точность позиционирования, например известных как дифференциальная система глобального позиционирования DGPS или кинематическая реального времени RTK. Конечно, могут использоваться другие спутниковые системы глобального позиционирования, имеющие достаточную точность, такие как GLONASS или GALILEO.
Каркас 1 имеет воображаемую ось а, расположенную на одной линии с вектором силы тяжести и относящуюся к планируемому воображаемому состоянию каркаса 1, в его базовом состоянии, не подверженной наклоняющим воздействиям. Опорные точки А5′, В5′, С5′, установленные посредством приемников АА, ВВ, СС, располагаются с электронно-оптическим геодезическим инструментом 3, связанным с каркасом 1′, и, более конкретно, позиционируются таким образом на верхнем уровне Е5 конструкции каркаса, чтобы существовала линия визирования на опорные точки А5′, В5′, С5′. Таким образом, может регистрироваться положение инструмента 3 относительно трех опорных точек А5′, В5′, С5' и инструмент 3 может быть привязан к абсолютной системе координат спутниковой системы 2 глобального позиционирования. Затем определяют положение инструмента 3 относительно особой точки Р5' каркаса 1′, например, посредством определения дальности оптическим способом до конкретной точки каркаса 1′, или размещением инструмента 3 в такой точке. Поскольку эти точки А5′, В5′, С5' предпочтительно располагаются на одном самом верхнем уровне Е5 конструкции, что и геодезический инструмент 3, приемники АА, ВВ, СС должны успешно принимать их сигналы, и инструмент 3 должен всегда находить подходящую линию визирования. С использованием этого устройства и технологии привязка инструмента 3 представляется возможной.
Вследствие перемещений в системе, однако, ситуация в системе отсчета, сконструированной таким образом, не соответствует будущему каркасу в его нейтральном, или статическом не наклоненном состоянии. По этой причине настоящую систему сравнивают с системой законченного строительством здания в его статическом положении с привязкой к возводимому каркасу, то есть к данным, относящимся к ходу строительства, которые должны быть получены. Это здание должно всегда располагаться на одной линии с вектором силы тяжести. По этой причине угол наклона α5 определяют гравиметрически, более конкретно, датчиком I5 наклона, позиционированным на самом верхнем уровне Е5 конструкции. Далее, воображаемая вертикальная ось, и более конкретно, центральная ось не отклоненного каркаса в этом воображаемом состоянии используется как исходная точка для опорной линии для наклона. Ось здания должна отходить от своего первоначального положения и, где применимо, от первоначальной формы, когда каркас подвергается наклоняющим воздействиям и наклоняется. Новая ось наклоненного каркаса, которую получают из воображаемой оси а не наклоненного каркаса, ниже по тексту называется реальной линией а′. Реальная линия а' проходит перпендикулярно к плоскости уровней конструкции, то есть Е5, более конкретно, через все уровни конструкции, то есть Е0, Е1, Е2, Е3, Е4, Е5, см. фиг.2. Эта реальная линия а' может быть прямой линией, если здание отклоняется с поворотом относительно оси, как показано на фиг.1. На практике, однако, наклоняющие воздействия становятся сильнее с увеличением высоты здания, так что наклон должен быть нелинейным. Следовательно, реальная линия а' может быть дугообразной, как показано на фиг.2, математически очерченной кривой или любой свободной формы. С использованием гравиметрического определения наклона, описанного выше, таким образом, определяют наклон реальной линии а' от воображаемой оси а, и, более конкретно такой наклон на самом верхнем уровне Е5 конструкции, который является результатом наклоняющих воздействий на каркас 1′.
Посредством приведения положений по меньшей мере трех опорных точек А5′, В5′, С5′ в абсолютной системе координат определяют положения геодезического инструмента 3 относительно каркаса 1′, конкретно относительно особой точки Р5′ и угла α5 наклона реальной линии а′, статическую систему координат, связанную с воображаемой осью а и относящуюся к планируемому статическому состоянию не наклоненного каркаса 1′, преобразуют в систему координат, связанную с реальной осью а' и динамически зависимую от угла α5 наклона. Эта динамическая система координат относится к каркасу 1′, при этом находясь в зависимости от его угла α5 наклона. Периодически угол α5 наклона реальной линии а' гравиметрически определяют, например, гравиметрическим датчиком I5 наклона, и геодезический инструмент 3 привязывается и согласовывается с системой координат, зависящей от угла наклона. Следовательно, является возможным создать систему отсчета для геодезического инструмента 3, которая по существу непрерывно подстраивается к текущему углу α5 наклона каркаса 1′.
Эти этапы могут повторяться, всегда для текущего уровня Е0, Е1, Е2, Е3, Е4, Е5 конструкции, по ходу строительства, в то время как значения угла α0, α1, α2, α3, α4, α5 наклона от реальной линии а' регистрируются через малые интервалы времени на ряде уровней Е0, Е1, Е2, Е3, Е4, Е5 конструкции и реальная линия а', которая, более конкретно, является искривленной, моделируется приведением этих углов α0, α1, α2, α3, α4, α5 наклона, см. фиг.2. В дополнительном развитии изобретения реальная линия а′, смоделированная по этим углам α0, α1, α2, α3, α4, α5 наклона, используется для моделирования дополнительных величин угла α6, α7 наклона, или дополнительного характера углов α6, α7 наклона, искривленной реальной линии а' за пределами самого верхнего уровня Е5 конструкции для части каркаса 1′′, которая подлежит возведению, здесь уровень Е6 конструкции, см. фиг.2, и уровень Е7 конструкции, который не показан. Таким образом, реальная линия а' математически продлевается вверх, в приблизительно вертикальном направлении и, следовательно, служит опорной для преобразования системы координат. Таким образом прогнозируют углы α6, α7 наклона каркаса 1′′, который еще не возведен, так что при оптических измерениях вверху, деформации каркаса 1′′, предвиденные по текущим наклоняющим воздействиям, принимают во внимание.
Более того, изобретение содержит систему преобразования системы координат для привязки и согласования, по меньшей мере, одного геодезического инструмента 3, размещенного на уровне Е5 конструкции каркаса 1, 1′, возводимой с привязкой к воображаемой оси а, ориентированной относительно вектора силы тяжести. Система для преобразования системы координат имеет, по меньшей мере, два гравиметрических датчика наклона, на фиг.2 показано шесть гравиметрических датчиков I0, I1, I2, I3, I4, I5 наклона, которые могут устанавливаться на различных уровнях Е0, Е1, Е2, Е3, Е4, Е5 конструкции каркаса 1' и могут использоваться для измерения углов α0, α1, α2, α3, α4, α5 наклона реальной линии а' от воображаемой оси а, который является результатом действия наклоняющих воздействий на каркас 1. Эти данные наклона могут быть переданы по сети 4 связи, то есть проводной или беспроводной локальной сети связи. Система для преобразования системы координат дополнительно содержит средство 5 для преобразования координат, например персональный компьютер, сконструированный и подключенный к датчикам I0, I1, I2, I3, I4, I5 наклона посредством сети 4 связи так, что при знании углов α0, α1, α2, α3, α4, α5 наклона реальной линии а' и соответствующих уровней Е0, Е1, Е2, Е3, Е4, Е5 конструкции статическая система координат, привязанная к воображаемой оси а, преобразуется в динамическую систему координат, зависящую от наклона, привязанную к реальной линии а′.
В дополнительном развитии изобретения, по меньшей мере, обеспечивают три гравиметрических датчика наклона, на фиг.2 шесть гравиметрических датчиков I0, I1, I2, I3, I4, I5 наклона, посредством которых регистрируют углы α0, α1, α2, α3, α4, α5 наклона искривленной реальной линии а' на различных уровнях Е0, Е1, Е2, Е3, Е4, Е5 конструкции, смотри фиг.2. Средство 5 преобразования системы координат сконструировано таким образом и подключено к датчикам I0, I1, I2, I3, I4, I5 наклона посредством сети 4 связи так, что статическая система координат, привязанная к воображаемой оси а, преобразуется в динамическую систему координат, зависящую от наклона, привязанную к искривленной реальной линии а′.
Электронно-оптический геодезический инструмент 3 и, более конкретно, автоматический тахеометр, сконструирован и подключен к датчикам I0, I1, I2, I3, I4, I5 наклона и средству 5 преобразования системы координат посредством сети 4 связи таким образом, что геодезический инструмент 3 может быть привязан и согласован с динамической, зависящей от наклона системой координат.
Хотя настоящее изобретение описано для одного варианта осуществления, следует понимать, что описание изобретения не должно интерпретироваться в качестве ограничивающего. Различные изменения и модификации должны, несомненно, быть ясными специалистам в области техники после прочтения вышеприведенного подробного описания.
Перечень условных обозначений
1 - не наклоненный каркас
1' - наклоненный каркас
1'' - каркас, подлежащий возведению
2 - спутниковая система глобального позиционирования/GPS
3 - (электронно-оптический) геодезический инструмент
4 - сеть связи
5 - средство преобразования системы координат
а - воображаемая ось
а' - реальная линия
АА - приемник (2)/приемник GPS
ВВ - приемник (2)/приемник GPS
СС - приемник (2)/приемник GPS
I5 - гравиметрический датчик наклона
А5' - опорная точка (наклоненный каркас)
В5' - опорная точка (наклоненный каркас)
С5' - опорная точка (наклоненный каркас)
Р5' - особая точка
Е5 - уровень конструкции
α5 - угол наклона
| название | год | авторы | номер документа |
|---|---|---|---|
| ВРАЩАЮЩИЙСЯ РЕЖУЩИЙ ИНСТРУМЕНТ | 2010 |
|
RU2514739C2 |
| ЗАЖИМ ДЛЯ КРЕПЛЕНИЯ ПРЕДМЕТА | 2001 |
|
RU2208719C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ПРОЕКЦИОННОГО БОРТОВОГО ИНДИКАТОРА | 2023 |
|
RU2814202C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ПРОЕКЦИОННОГО БОРТОВОГО ИНДИКАТОРА | 2015 |
|
RU2582210C1 |
| ОДНОМЕРНЫЙ ШИРОКОДИАПАЗОННЫЙ ФАЗОВЫЙ ПЕЛЕНГАТОР НА ОСНОВЕ ИСКУССТВЕННОЙ НЕЙРОННОЙ СЕТИ | 2017 |
|
RU2679005C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ЭТАПЕ НАЧАЛЬНОЙ ВЫСТАВКИ | 2005 |
|
RU2300081C1 |
| РЕЖУЩАЯ ПЛАСТИНА И ФРЕЗА ДЛЯ ЕЕ ИСПОЛЬЗОВАНИЯ | 2022 |
|
RU2801064C1 |
| БОЛЬШЕГРУЗНАЯ ШИНА | 2011 |
|
RU2551699C2 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС СТРУКТУРИЗАЦИИ КОМПЬЮТЕРНЫХ КОДОВ, АДЕКВАТНЫХ ПРОИЗВОЛЬНЫМ ОБЪЕКТАМ | 2003 |
|
RU2295763C2 |
| МНОГОЗОНАЛЬНОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ЗЕМЛИ С ГЕОСТАЦИОНАРНЫХ ОРБИТ | 2006 |
|
RU2319183C1 |
Изобретение относится к технологии проведения геодезических измерений для высотного здания, подлежащего возведению, а также к системе для координатного преобразования для привязки и согласования, по меньшей мере, одного геодезического измерительного прибора. Техническим результатом изобретения является создание точной и надежной технологии геодезических измерений для каркаса любой высоты, подлежащего возведению, и особенно для высотных зданий, подвергаемых наклоняющему воздействию и с затрудненным использованием опорных точек на поверхности земли. По меньшей мере, три опорные точки задаются приемниками спутниковой системы глобального позиционирования на текущем самом верхнем уровне конструкции каркаса. Положение электронно-оптического геодезического инструмента, установленного на каркасе, определяется относительно трех опорных точек. Угол наклона реальной линии, развивающейся из воображаемой оси от наклоняющих воздействий на каркас, регистрируют с помощью гравиметрического датчика. Статическую систему координат, привязанную к воображаемой оси, преобразуют в систему координат, привязанную к реальной линии и динамически зависящую от угла наклона, посредством приведения, по меньшей мере, трех опорных точек, относительного положения геодезического инструмента и угла наклона реальной линии. 2 н. и 7 з.п. ф-лы, 2 ил.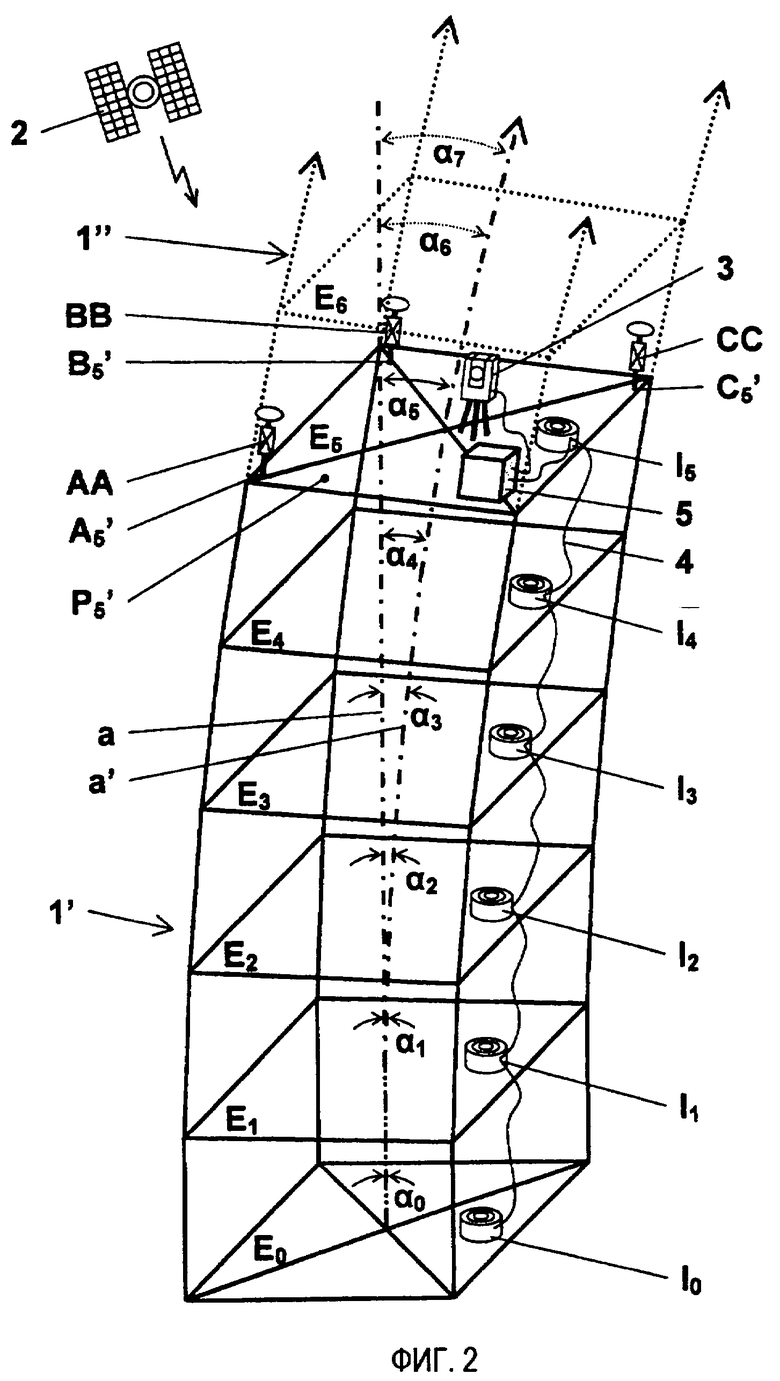
1. Способ проведения геодезических измерений для каркаса (1; 1'), более конкретно, для высотного здания, подлежащего возведению и имеющего воображаемую ось (а), сориентированную относительно вектора силы тяжести,
содержащий этапы, на которых
задают, по меньшей мере, три опорные точки (А5', B5', C5') приемниками (АА, ВВ, СС) спутниковой системы глобального позиционирования (2) на текущем самом верхнем уровне E5 каркаса (1'),
определяют позицию электронно-оптического геодезического инструмента (3), установленного на каркасе (1'), относительно трех опорных точек (А5', В5', C5'),
выполняют гравиметрическую регистрацию угла α5 наклона реальной линии (а'), развивающейся от воображаемой оси (а) от наклоняющих воздействий, действующих на каркас (1; 1'), более конкретно, с помощью гравиметрического датчика (I1) наклона,
преобразуют статическую систему координат, привязанную к воображаемой оси (а), в систему координат, привязанную к реальной линии (а') и динамически зависящую от угла α5 наклона, посредством приведения по меньшей мере, трех опорных точек (А5', В5', C5') относительного положения геодезического инструмента (3), и угла α5 наклона реальной линии (a'), и
повторение этапов, на которых выполняют гравиметрическую регистрацию угла α5 наклона реальной линии (а') и
выполняют привязку и согласование геодезического инструмента (3) к системе координат, динамически зависящей от угла α5 наклона.
2. Способ проведения геодезических измерений по п.1, отличающийся тем, что этапы и повторные этапы повторяют по ходу строительства каркаса (1; 1'), всегда для текущего самого верхнего уровня (Е0, E1, E2, Е3, Е4, E5) конструкции.
3. Способ по п.2, отличающийся тем, что углы (α0, α1, α2, α3, α4, α5) наклона реальной линии (а') регистрируют через малые интервалы времени на нескольких уровнях (Е0, E1, Е2, Е3, Е4, E5) конструкции и
реальную линию (а') моделируют посредством приведения к углам ((α0, α1, α2, α3, α4, α5) наклона.
4. Способ по п.3, отличающийся тем, что реальную линию (a') моделируют как кривую.
5. Способ по п.4, отличающийся тем, что дополнительный характер углов (α6, α7) наклона искривленной реальной линии (а') каркаса (1') моделируют за пределами уровня (E5) конструкции для каркаса (1”), подлежащей возведению, посредством приведения реальной оси (а'), смоделированной по зарегистрированным углам (α0, α1, α2, α3, α4, α5) наклона.
6. Способ по пп.1-3, отличающийся тем, что реальную линию (а') моделируют, как прямую линию.
7. Система преобразования системы координат для выполнения привязки и согласования, по меньшей мере, одного геодезического инструмента (3), размещенного на уровне (Е5) конструкции каркаса (1; 1'), возведенной с привязкой к воображаемой оси (а), сориентированной относительно вектора силы тяжести, включающая в себя по меньшей мере, два гравиметрических датчика (I0, I1, I2, I3, I4, I5) наклона, которые могут позиционироваться на различных уровнях (Е0, E1, Е2, Е3, Е4, E5) конструкции каркаса (1; 1') и использоваться для регистрации на различных уровнях (Е0, E1, Е2, Е3, Е4, E5) конструкции углов наклона (α0, α1, α2, α3, α4, α5) реальной линии (а'), развивающейся из воображаемой оси (а) под наклоняющим воздействием, действующим на каркас (1; 1'), сеть (4) связи, посредством которой могут передаваться, по меньшей мере, данные углов (α0, α1, α2, α3, α4, α5) наклона, и средство (5) преобразования системы координат, сконструированное и присоединенное к датчикам (I0, I1, I2, I3, I4, I5) наклона посредством сети (4) связи таким образом, что, зная углы (α0, α1, α2, α3, α4, α5) наклона реальной линии (а') и применимые уровни (Е0, E1, Е2, Е3, Е4, E5) конструкции, выполняется преобразование статической системы координат, привязанной к воображаемой оси (а), в систему координат, привязанную к реальной линии (а') и динамически зависящую от углов (α0, α1, α2, α3, α4, α5) наклона.
8. Система по п.7, отличающаяся тем, что создают, по меньшей мере, три гравиметрических датчика (I0, I1, I2, I3, I4, I5) угла наклона, посредством которых могут регистрироваться углы (α0, α1, α2, α3, α4, α5) наклона искривленной реальной линии (а') на различных уровнях (Е0, E1, Е2, Е3, Е4, E5) конструкции, и средство (5) преобразования системы координат, сконструированное и присоединенное к датчикам (I0, I1, I2, I3, I4, I5) наклона посредством сети (4) связи таким образом, что выполняется преобразование статической системы координат, привязанной к воображаемой оси (а) в систему координат, привязанную к искривленной реальной линии (а') и динамически зависящую от углов (α0, α1, α2, α3, α4, α5) наклона.
9. Система по п.7 или 8, отличающаяся тем, что электронно-оптический геодезический инструмент (3) и, более конкретно, автоматический тахеометр, сконструирован и присоединен к датчикам (I0, I1, I2, I3, I4, I5) наклона и средству (5) преобразования системы координат посредством сети (4) связи таким образом, что электронно-оптический геодезический инструмент (3) может быть привязан и согласован с системой координат, динамически зависящей от углов (α0, α1, α2, α3, α4, α5)наклона.
| WO 9740547 A1, 30.10.1997 | |||
| DE 4238003 C1, 13.01.1994 | |||
| Способ определения осадок сооружений | 1984 |
|
SU1213350A1 |
| СПОСОБ ПРОИЗВОДСТВА КООРДИНАТНЫХ ИСПОЛНИТЕЛЬНЫХ СЪЕМОК | 2004 |
|
RU2267745C1 |
| СПОСОБ ПРОИЗВОДСТВА РАЗБИВОЧНЫХ РАБОТ | 2000 |
|
RU2176778C1 |

