Данное изобретение относится к области машино- и приборостроения и представляет собой механическое средство фиксации изделий. Оно может быть использовано в узлах крепления крупногабаритных трансформируемых конструкций, раскрывающихся в рабочее положение из компактно уложенного положения транспортировки (такими конструкциями могут быть мачты, фермы, штанги, мосты, лестницы, трапы, палатки, чехлы, крыши); в шахтном и горном оборудовании, в робототехнике и манипуляторах; для автоматизации производства; в системах стыковки, дооснащения и перемещения летательных и космических аппаратов; в держателях научного и служебного оборудования в открытом космосе; в страховочных и транспортировочных фалах; в альпинистском снаряжении.
Известен пружинный зажим, представляющий собой прищепку (пат. Великобритании 1451919, 1976). Зажим содержит пружину и рычаги, соединенные между собой цилиндрическим шарниром посередине, снабженные парой сведенных вместе противоположных лапок и парой участков, выполняющих функцию рукоятки, спиральная пружина надета на стержень, имеющий рукоятку. Последний перемещается из первого, свободного положения во второе, в котором пружина сжата и действует между участками, выполняющими функцию рукоятки. К недостаткам аналога относятся отсутствие фиксатора сжатого положения зажима, что приводит к ненадежной фиксации зажима, и отсутствие автоматической фиксации.
Известен также зажим для крепления гибкой юбки к боковой пластине ленточного конвейера, представляющий собой кулачковый фиксатор (пат. Великобритании 2081367, 1982). Устройство принято в качестве прототипа. Зажим содержит корпус, рукоятку, промежуточный элемент, несущий на одном конце стержень, а на другом - упорную пяту, и кулачковый приводящий элемент, поворотно установленный на цапфах, которые прикреплены к опоре. Недостатками прототипа являются отсутствие автоматической фиксации и громоздкость конструкции.
Задачей изобретения является повышение надежности крепления и оперативности срабатывания; обеспечение автоматизации процесса фиксации; компактность и малый вес; прочность и жесткость корпуса; технологичность в изготовлении; повышение унификации изделия.
Поставленная задача достигается за счет того, что зажим для крепления предмета, содержащий корпус и рукоятку, отличающийся тем, что корпус имеет П-образный паз, кроме того, корпус имеет полость, ось которой перпендикулярна продольной оси П-образного паза, в полости размещена защелка для закрепления предмета в П-образном пазу, во внутренней полости которой размещены пружина, ползун и винт, в боковой стенке защелки выполнен сквозной паз, причем ось паза параллельна оси защелки, в корпусе зажима также выполнен сквозной паз, ось которого параллельна оси полости корпуса, при этом в сквозных пазах защелки и корпуса размещен штифт, жестко установленный в ползуне, вдоль оси ползуна выполнено резьбовое отверстие, в которое одним концом ввинчен винт, на другом конце которого размещена рукоятка, кроме того, винт снабжен ограничителем поступательного движения, свободный конец защелки снабжен тремя скосами, имеющими наклоны по отношению к продольной оси защелки под углами α1, α2, α3, при этом под углом α1 выполнен скос со стороны входа в П-образный паз, а под углами α2, α3 - скосы со стороны глухого торца П-образного паза, причем arctgf<α1<π/2, 0<α2<arctgf, 0<α3<π/2, где f - коэффициент трения скосов защелки о поверхность зажимаемого предмета, входные стенки П-образного паза имеют центрирующие скосы, ориентированные к оси симметрии полости зажима под углами α4, α5, где arctgf′<α4<π/2, arctgf′<α5<π/2,
где - f' коэффициент трения центрирующих скосов П-образного паза о поверхность зажимаемого предмета.
Сущность изобретения поясняется чертежами, где
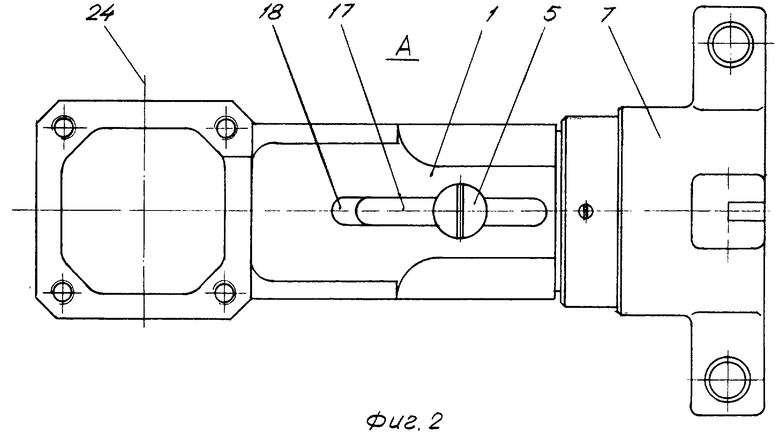
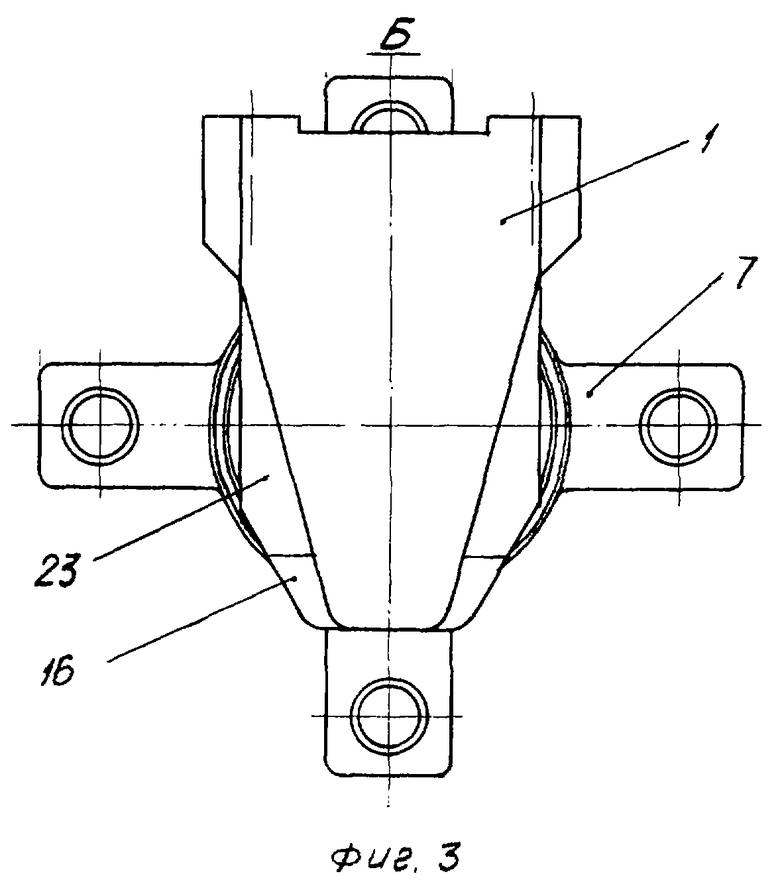
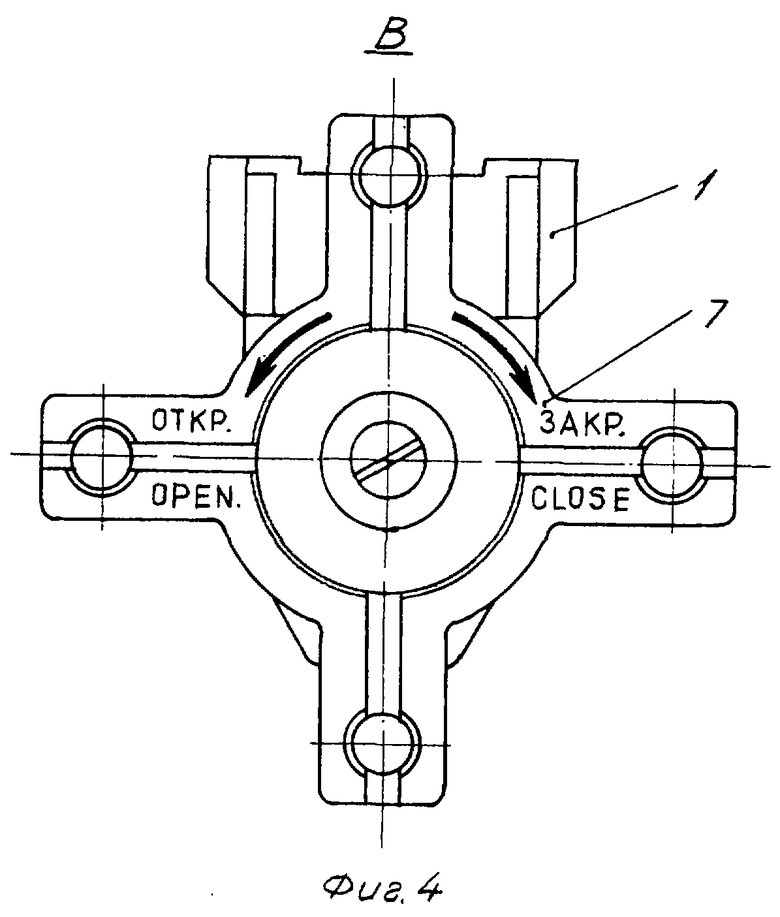
на фиг.1-4 представлен общий вид предлагаемого устройства;
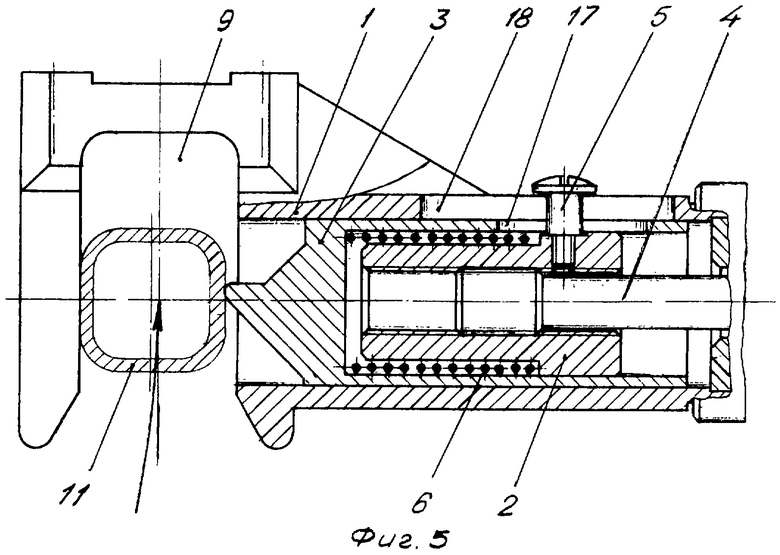
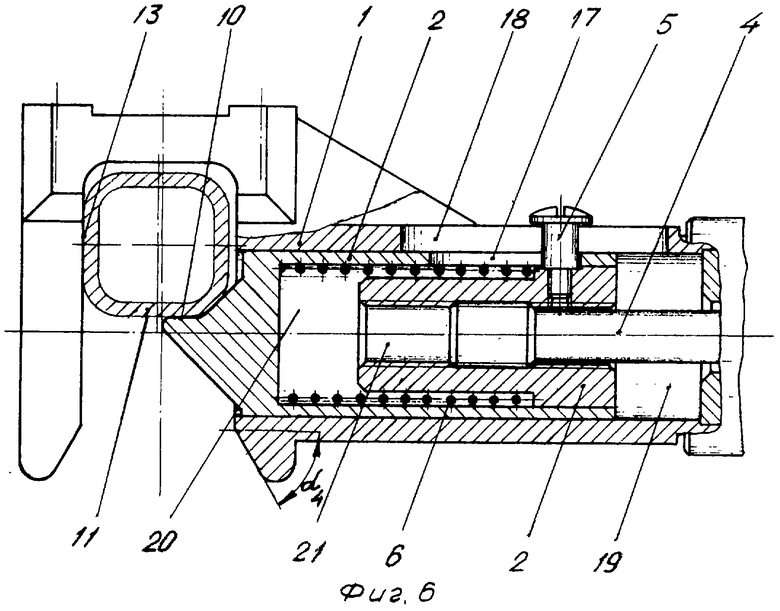
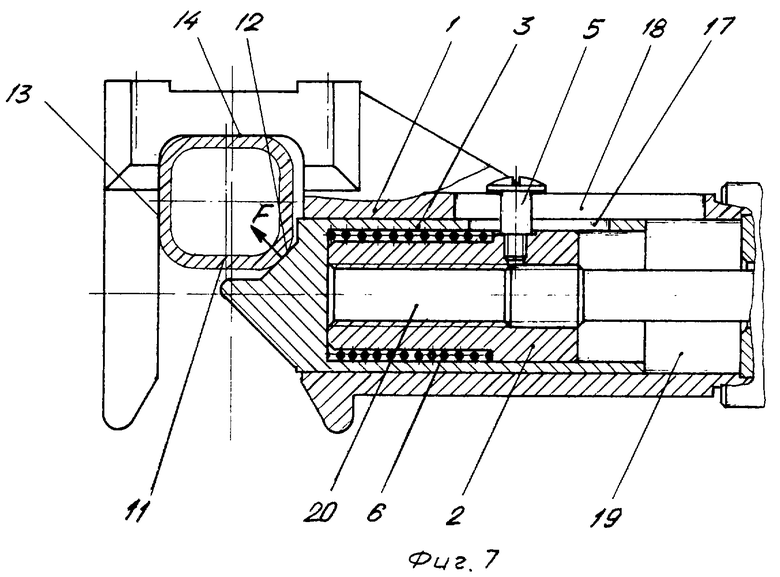
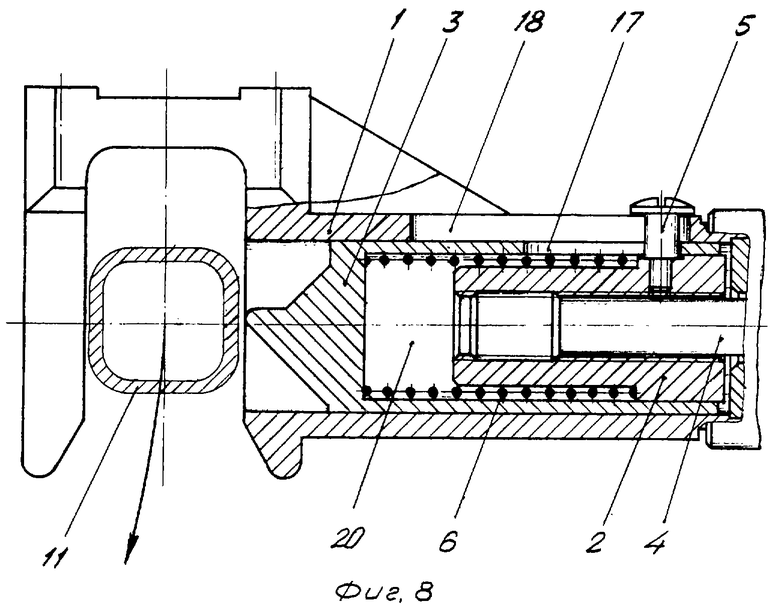
на фиг. 1, 5-8 показаны положения элементов зажима на разных этапах его работы: перед входом предмета (подлежащего "захвату") в П-образный паз корпуса зажима (фиг. 1); при промежуточном положении предмета (фиг.5); при "захвате" предмета в корпусе зажима (фиг.6); при жесткой фиксации предмета (фиг.7); при удалении предмета из зажима (фиг.8);
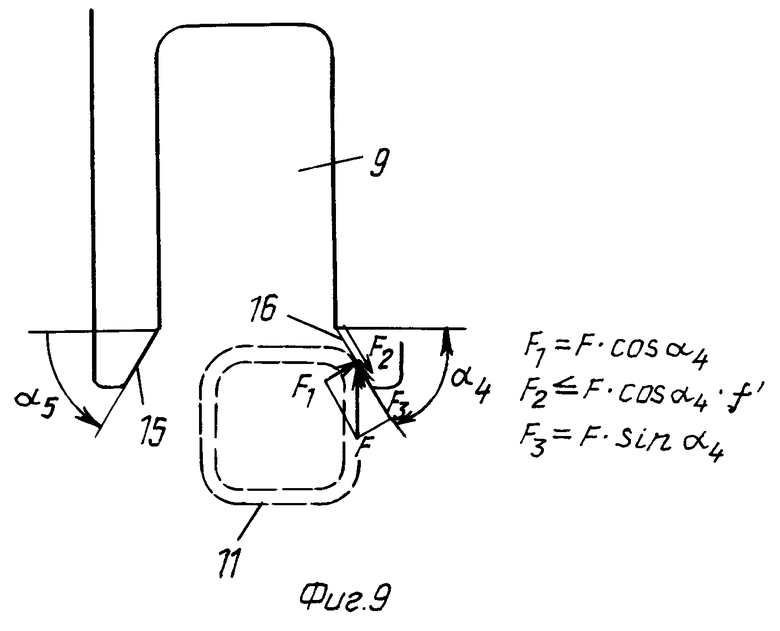
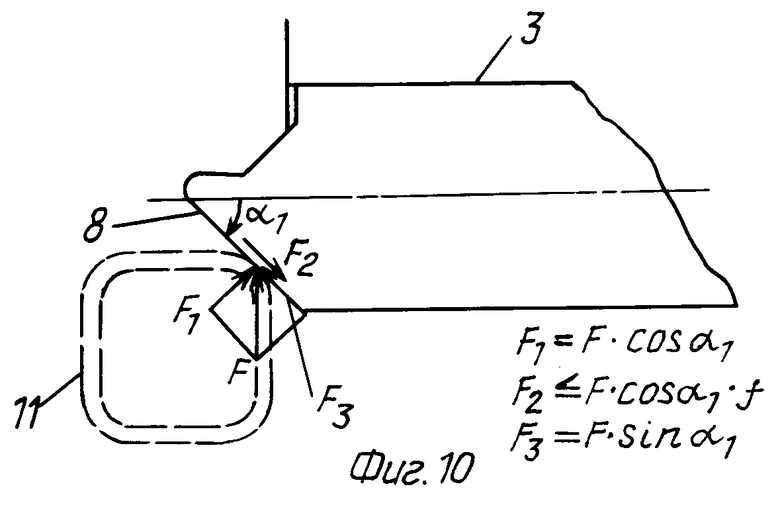
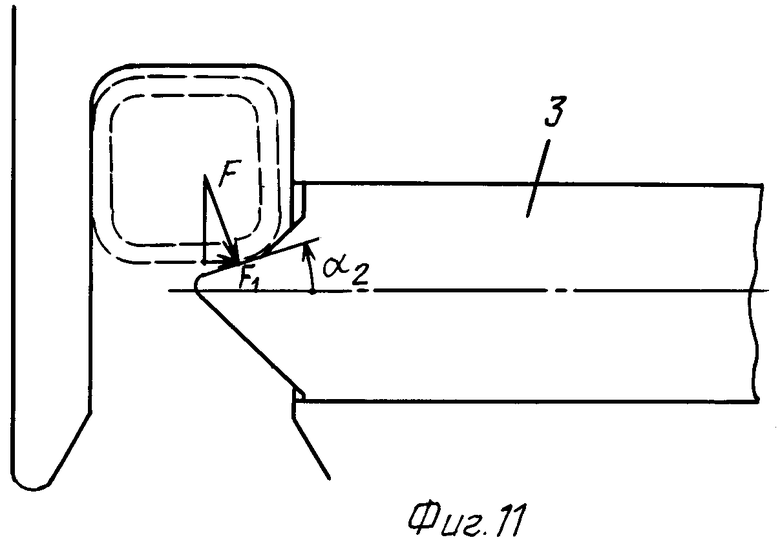
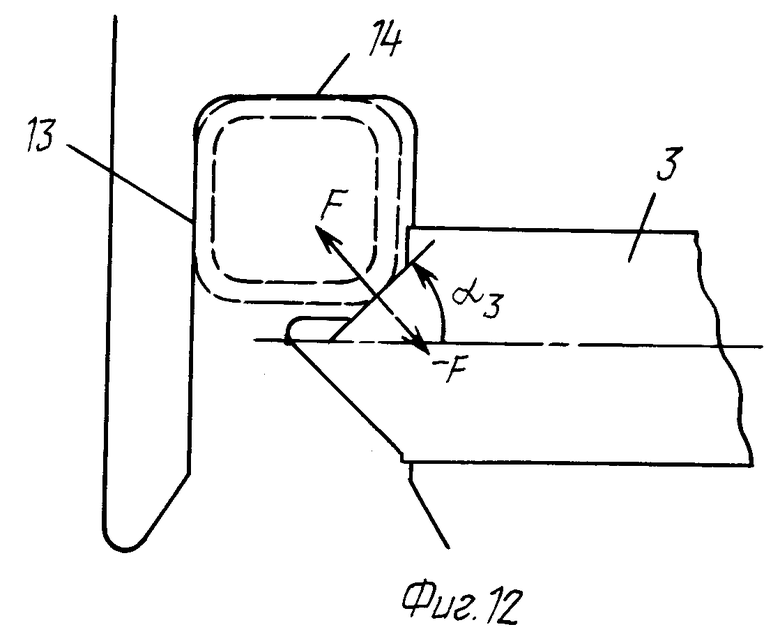
фиг.9-12 поясняют определение границ для значений углов α1, α2,...,α5.
На чертежах представлены следующие позиции:
1 - корпус,
2 - ползун,
3 - защелка,
4 - винт,
5 - штифт,
6 - пружина,
7 - рукоятка,
8 - скос,
9 - П-образный паз,
10 - скос,
11 - предмет,
12 - скос,
13 - стенка,
14 - стенка,
15 - скос,
16 - скос,
17 - сквозной паз,
18 - сквозной паз,
19 - полость,
20 - полость,
21 - резьбовое отверстие,
22 - буртик,
23 - стенка,
24 - ось П-образного паза.
Предлагаемый зажим для крепления предмета содержит корпус 1 и рукоятку 7. При этом корпус 1 имеет П-образный паз 9, кроме того, корпус 1 имеет полость 19, ось которой перпендикулярна продольной оси симметрии паза 9. В полости 19 размещена защелка 3, во внутренней полости которой размещены пружина 6, ползун 2 и винт 4. В боковой стенке защелки 3 выполнен сквозной паз 17, причем ось паза 17 параллельна оси защелки 3. В корпусе 1 зажима также выполнен сквозной паз 18, ось которого параллельна оси полости 19. При этом в сквозных пазах 17, 18 размещен штифт 5, жестко установленный в ползуне 2. Вдоль оси ползуна 2 выполнено резьбовое отверстие 21, в которое одним концом ввинчен винт 4, на другом конце которого размещена рукоятка 7. Кроме того, винт 4 снабжен ограничителем поступательного движения, выполненным в виде буртика 22, препятствующего смещению винта 4 относительно корпуса 1 зажима. Свободный конец защелки 3 снабжен скосами 8, 10, 12. При этом угол α1 наклона скоса 8 к оси полости 19 равен 45o. Угол α2 наклона скоса 10 равен 0o. Угол α3 наклона скоса 12 равен 45o. Входные стенки 13, 23 П-образного паза 9 имеют центрирующие скосы 15, 16, ориентированные к оси симметрии полости 19 зажима под углами α4 = α5 = 60°.
При необходимости "захватить" предмет 11 зажим располагается таким образом, чтобы ось предмета 11 была параллельна оси 24 паза 9 (фиг.1, 2). При "погружении" в паз 9 предмет 11 корректирует свое положение относительно стенок паза 9, взаимодействуя с центрирующими скосами 15, 16. После чего предмет 11 взаимодействует со скосом 8 (фиг.1) защелки 3, отодвигает последнюю (фиг.5) (сжимая пружину 6) и оказывается в полости П-образного паза 9 зажима. При этом защелка 3 под действием пружины 6 возвращается в исходное положение. Причем скос 10 защелки 3 перекрывает предмету 11 выход из паза 9 (фиг.6).
Предмет 11 оказывается запертым в пазу 9.
На этапе фиксации предмета 11 оператор вращает рукоятку 7 в направлении "закрыть" (фиг.4). При этом в том же направлении вращается винт 4, свинчивая с себя ползун 2. Причем штифт 5, упираясь в стенки паза 18, не позволяет ползуну 2 вращаться вокруг своей продольной оси. Вследствие чего ползун 2, перемещаясь вдоль оси полости 19, смещает пружину 6 и защелку 3 в направлении предмета 11 до тех пор, пока скос 12 защелки 3 упрется в упомянутый предмет 11.
При дальнейшем (в том же направлении) вращении рукоятки 7 ползун 2, сжимая пружину 6, достигает донышка защелки 3 и через него воздействует на предмет 11, "вжимая" его (см. силу F, фиг.7) в угол между стенками 13, 14.
При этом предмет 11 оказывается жестко зафиксированным в корпусе 1 зажима.
На этапе расфиксации предмета 11 оператор вращает рукоятку 7 в направлении "открыть" (фиг. 4). При этом в том же направлении вращается винт 4, навинчивая на себя ползун 2 и перемещая его вдоль оси полости 19. Причем штифт 5 увлекает за собой защелку 3 до тех пор, пока скосы 8, 10, 12 окажутся утопленными в полости 19 корпуса 1 зажима (фиг.8), а паз 9 окажется свободным. При этом предмет 11 может быть беспрепятственно извлечен из паза 9.
Дадим обоснование допустимых границ для значений углов α1,...,α5.
Назначение скоса 16 - скорректировать в нужную сторону положение предмета 11 при его заглублении в паз 9. Пусть (фиг.9) на предмет 11 оказывает внешнее воздействие F в сторону паза 9. Для возможности скольжения предмета 11 по скосу 16 в сторону паза 9 необходимо, чтобы имело место
F•sinα4>F•cosα4•f′ (1)
где f' - коэффициент трения предмета 11 о скос 16.
Из (1) имеем:
tgα4>f′ (2)
Откуда
α4>arctgf′ (3)
С другой стороны, при α4 ~ π/2 скос 16 перестает быть центрирующим. Поэтому для величины угла α4 можем записать
arctgf′<α4<π/2 (4)
Аналогично для угла α5 имеем:
arctgf′<α5<π/2 (5)
Назначение скоса 8 - обеспечить смещение защелки 3 внутрь полости 19 на этапе "захвата" предмета 11.
Пусть (фиг.10) на предмет 11 оказывается внешнее воздействие F в сторону паза 9.
Для возможности скольжения предмета 11 по скосу 8 при утапливании защелки 3 в полость 19 необходимо, чтобы имело место
F•sinα1>F•cosα1•f, (6)
где f - коэффициент трения предмета 11 о скос 8.
Из (6) имеем:
α1>arctgf (7)
С другой стороны, при α1 ~ π/2 защелка 3 уже не может выполнять своих функций. Поэтому для величины угла α1, можем записать:
arctgf<α1<π/2 (8)
Назначение скоса 10 - перекрыть выход предмету 11 из паза 9. Поэтому угол α2 должен быть выбран с таким расчетом, чтобы контакт предмета 11 со скосом 10 не вызывал смещения защелки 3 вдоль оси полости 19.
Пусть (фиг. 11) F - сила взаимодействия предмета 11 со скосом 10. При этом сила F1, стремящаяся сдвинуть защелку 3, равна
F1 = F•sinα2 (9)
Теперь рассмотрим максимальную силу F1, которая сопротивляется сдвигу защелки:
F1 = F•cosα2•f+F0, (10)
где f - коэффициент трения предмета 11 о скос 10;
F0 - сила сжатия пружины 6.
Условие неподвижности защелки запишется как
F ≤ F1 (11)
Или с учетом (9), (10),
F•sinα2≤F•cosα2•f+F0, (12)
При F>>F0 выражение (12) упрощается и принимает вид
F•sinα2≤F•cosα2•f, (13)
Откуда
α2≤arctgf. (14)
С другой стороны, исходя из функционального назначения скоса 10, имеем:
α2≥0
Объединив неравенства (14), (15), для допустимой величины угла α2 можем записать
Назначение скоса 12 - воздействовать на предмет 11, обеспечивая жесткую фиксацию предмета 11 в пазу 9. Величина угла α3, (фиг.12) при этом определяется из следующих соображений:
- необходимостью сравнительно большим или меньшим усилием прижать предмет 11 к стенке 13 или 14;
- необходимостью учитывать прочность предмета 11 по направлению прилагаемой к нему силы F (фиг.12).
Учитывая указанные обстоятельства, для величины угла α3 можем записать
π/2≥α3>0 (17)
Предлагаемое устройство обладает следующими преимуществами.
1. Зажим обладает единственным управляющим органом-рукояткой, приводящей его (зажим) в режим автоматического захвата, жесткой фиксации или расфиксации. Кроме удобства пользования указанная особенность механизма оказывается в ряде случаев весьма существенной в другом смысле, а именно в обстоятельствах стесненного пространства, когда достать рукой какую-либо дополнительную ручку или рычаг механизма просто не представляется возможным. (Такие случаи весьма часто представляет практика).
2. Устройство обладает свойством быстрого и надежного "захвата" предмета с последующей жесткой фиксацией его корпусе зажима.
Использование предлагаемого средства фиксации дает существенное преимущество там, где требуется оперативность проведения монтажных работ в сочетании с высокой надежностью фиксации.
Так фиксация на стержне прямоугольного поперечного сечения (поручне, трубе, профиле) происходит за доли секунды и полностью исключает возможность проворачивания стержня вокруг своей оси, а после фиксации стопорным винтом - также скольжения вдоль оси стержня.
3. Использование таких зажимов в качестве струбцин для фиксации деталей, заготовок и инструментов в производстве и изготовлении изделий существенно сократит время на подготовку и налаживание оборудования.
4. Компактность зажима, его малое время фиксации, надежность крепления, исключающая проворачивание и скольжение фиксируемого изделия, дает возможность использования его в качестве узлов крепления крупногабаритных трансформируемых конструкций, раскрывающихся из компактного уложенного положения: трансформируемые мачты, фермы, штанги, каркасы.
5. Конструкция зажима пожаро- и взрывобезопасна, что дает возможность применения его в шахтах, в пожароопасных местах и агрессивных средах.
6. Учитывая автоматическую фиксацию, зажимы такого типа могут применяться для крепления держателей научного и служебного оборудования в открытом космосе.
7. Все детали зажима технологичны и выполнены из технологичных конструкционных материалов, для их изготовления не требуется специальной дорогостоящей оснастки, сборочный процесс также не представляет особых трудностей, поэтому производство таких зажимов экономически выгодно.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОРАЗЪЕМНОЕ ЦАНГОВОЕ СОЕДИНЕНИЕ | 2001 |
|
RU2202726C1 |
| ЗАЖИМ ДЛЯ КРЕПЛЕНИЯ ИЗДЕЛИЯ | 1999 |
|
RU2177567C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| УЗЕЛ РОТАЦИИ | 2001 |
|
RU2196545C2 |
| УСТРОЙСТВО ФИКСАЦИИ ПРЕДМЕТА НА ДВУХ ПОРУЧНЯХ КОСМИЧЕСКОГО ОБЪЕКТА | 2002 |
|
RU2220079C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ШАРОВОГО ШАРНИРА | 2001 |
|
RU2187418C1 |
| БЫСТРОРАЗЪЕМНОЕ ТРУБНОЕ СОЕДИНЕНИЕ | 2000 |
|
RU2187739C1 |
| СОЕДИНИТЕЛЬНЫЙ УЗЕЛ ДЛЯ ТРУБОПРОВОДОВ | 2002 |
|
RU2224164C1 |
| УСТРОЙСТВО ДЛЯ ПОДСОЕДИНЕНИЯ КОММУНИКАЦИЙ | 2001 |
|
RU2194901C2 |
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 2001 |
|
RU2208183C2 |
Изобретение относится к машиностроению и приборостроению и представляет собой механическое средство фиксации изделий. Зажим для крепления предмета содержит корпус и рукоятку. Корпус имеет П-образный паз и полость, ось которой перпендикулярна продольной оси симметрии П-образного паза. В полости размещена защелка для закрепления предмета в П-образном пазу, во внутренней полости которой размещены пружина, ползун и винт. В боковой стенке защелки выполнен сквозной паз, причем ось паза параллельна оси защелки. В корпусе зажима также выполнен сквозной паз, ось которого параллельна оси полости корпуса, при этом в сквозных пазах защелки и корпуса размещен штифт, жестко установленный в ползуне. Вдоль оси ползуна выполнено резьбовое отверстие, в которое одним концом ввинчен винт, на другом конце которого размещена рукоятка. Винт снабжен ограничителем поступательного движения, свободный конец защелки снабжен тремя скосами, имеющими наклоны по отношению к продольной оси защелки под углами α1, α2, α3. При этом под углом α1 выполнен скос со стороны входа в П-образный паз, а под углами α2, α3 - скосы со стороны глухого торца П-образного паза, причем arctgf<α1<π/2, 0<α2<arctgf, 0<α3<π/2, где f - коэффициент трения скосов защелки о поверхность зажимаемого предмета, входные стенки П-образного паза имеют центрирующие скосы, ориентированные к оси симметрии полости зажима под углами α4, α5, где arctgf′<α4<π/2, arctgf′<α5<π/2, где f' - коэффициент трения центрирующих скосов П-образного паза о поверхность зажимаемого предмета. В результате повышается надежность крепления и оперативность срабатывания, обеспечивается автоматизация процесса фиксации, компактность и малый вес, повышается прочность и жесткость корпуса, технологичность в изготовлении, унификация изделия. 12 ил.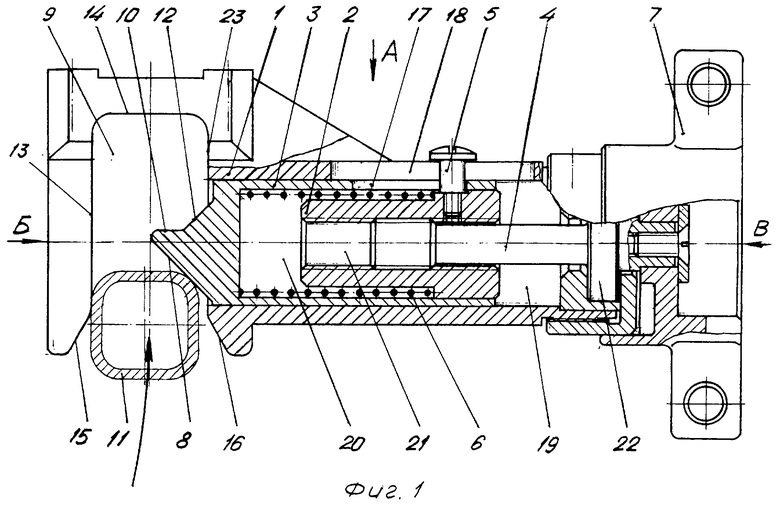
Зажим для крепления предмета, содержащий корпус и рукоятку, отличающийся тем, что корпус имеет П-образный паз, кроме того, корпус имеет полость, ось которой перпендикулярна продольной оси симметрии П-образного паза, в полости размещена защелка для закрепления предмета в П-образном пазу, во внутренней полости которой размещены пружина, ползун и винт, в боковой стенке защелки выполнен сквозной паз, причем ось паза параллельна оси защелки, в корпусе зажима также выполнен сквозной паз, ось которого параллельна оси полости корпуса, при этом в сквозных пазах защелки и корпуса размещен штифт, жестко установленный в ползуне, вдоль оси ползуна выполнено резьбовое отверстие, в которое одним концом ввинчен винт, на другом конце которого размещена рукоятка, кроме того, винт снабжен ограничителем поступательного движения, свободный конец защелки снабжен тремя скосами, имеющими наклоны по отношению к продольной оси защелки под углами α1, α2, α3, при этом под углом α1 выполнен скос со стороны входа в П-образный паз, а под углами α2, α3 - скосы со стороны глухого торца П-образного паза, причем arctgf<α1<π/2, 0<α2<arctgf, 0<α3<π/2, где f - коэффициент трения скосов защелки о поверхность зажимаемого предмета, входные стенки П-образного паза имеют центрирующие скосы, ориентированные к оси симметрии полости зажима под углами α4, α5, где arctgf′<α4<π/2, arctgf′<α5<π/2, где f' - коэффициент трения центрирующих скосов П-образного паза о поверхность зажимаемого предмета.
| УСТРОЙСТВО ДЛЯ БЫСТРОСЪЕМНОГО СОЕДИНЕНИЯ ТРУБ И ШЛАНГОВ | 1993 |
|
RU2081367C1 |
| SU 756393 А, 15.08.1980 | |||
| Фиксатор | 1976 |
|
SU558111A1 |
| Узел крепления пуансона | 1977 |
|
SU625829A1 |

