Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к области интерпретации измерений, осуществляемых каротажными приборами с целью определения свойств толщи горных пород. Более точно, изобретение относится к способу определения удельного сопротивления толщи горных пород на основе данных каротажа сопротивлений с использованием множества групп приемников.
Предпосылки создания изобретения
Для определения электрических свойств толщи горных пород, окружающих ствол скважины, обычно используют приборы индукционного, сейсмического и контактного каротажа. При помощи данных каротажных приборов измеряют значения кажущегося удельного сопротивления (или проводимости) толщи горных пород, которые при их соответствующей интерпретации служат для определения нефтефизических свойств толщи горных пород и содержащихся в ней флюидов.
Физические принципы индукционного каротажа сопротивлений описаны, например, в публикации "Introduction to Induction Logging and Application to Logging of Wells Drilled with Oil-Based Mud", H.D.Doll, Journal of Petroleum Technology, том. 1, стр.148, Общество инженеров-нефтяников, Ричардсон, Техас, США (1949 г.). Со времени публикации названной работы приборы индукционного каротажа сопротивлений претерпели множество усовершенствований и изменений. Описание таких изменений и усовершенствований можно найти, например, в патентах US 4837517, US 5157605 (Chandler и др.) и US 5452761 (Beard и др). Известны другие приборы, включающие прибор бокового каротажа с высокой разрешающей способностью (HDLL) компании "Бейкер Хьюз", описанный в патенте US 6060885 (Tabarovsky и др.), и любые приборы из группы приборов бокового каротажа с использованием группы приемников, например прибор высокочувствительного бокового каротажа (HRLA) компании "Шлумбергер Инк."
Анализ измерений, осуществляемых приборами индукционного каротажа с использованием множества групп приемников, такими как приборы, описанными в US 5452761, и приборами контактного каротажа, такими как HDLL и HRLA или любыми приборами из группы приборов бокового каротажа с использованием множества групп приемников, основан на инверсии данных. В известных из уровня техники способах инверсии для всего процесса интерпретации обычно используют одну модель толщи горных пород. Ограниченность данного подхода проявляется при осуществлении комплексных или последовательных инверсий.
Одна из сложностей, связанных с инверсией, заключается в том, что строение земной толщи характеризуется как минимум двухмерной моделью (слои, удельное сопротивление каждого из которых меняется в радиальном направлении). Метод точной двухмерной инверсии был бы достаточно трудоемким и непрактичным для применения в месте расположения скважины. См., например, Mezzatesta и др., и Barber и др. Для ускорения инверсии в прошлом применялись различные способы. Один из них основан на последовательном определении параметров толщи горных пород. См., например, Frenkel и др. (2004 г.). Другой способ заключается в построении исходной модели более высокого качества. Его рассматривает Hakvoort и др. или Frenkel и Walker (2001 г.) при описании приборов высокочувствительного бокового каротажа. Еще один способ заключается в том, что процесс многомерной (двухмерной или трехмерной) инверсии разделен на последовательность процессов одномерной инверсии. См., например, патент US 5889729 (Frenkel и др.), Frenkel и др. (1996 г.) и Frenkel (2000 г.), в котором описан способ быстрой инверсии, заключающийся в том, что осуществляют последовательность одномерных приближений к истинному двухмерному или трехмерному изотропному или анизотропному отображению.
У Griffiths и др. предложен так называемый способ 1+D+1-D, который основан на последовательных одномерных вертикальных (с поправкой на влияние прилегающих слоев) и одномерных горизонтальных (радиальных) инверсий. Как указывают авторы, основной недостаток данного способа заключается в том, что для тонких пластов с проникновением могут быть получены неверные результаты. Таким образом, для полной интерпретации необходима трудоемкая дополнительная стадия точной двухмерной инверсии.
Следует отметить, что в упомянутых способах интерпретации методом инверсии данных каротажа, поступающих от группы приемников, используется одна модель толщи горных пород. Поскольку не учитываются различия в разрешающей способности по вертикали данных, которые поступают от группы приемников, в результате комплексной или последовательной инверсии могут быть получены неустойчивые или неверные результаты для тонких пластов с проникновением. Известен так называемый метод инверсии с использованием различных масштабов, который применялся для интерпретации сейсмических данных (см., например, Bunks и др. и Zhou), но не применялся для комплексной инверсии каротажных диаграмм с различной разрешающей способностью.
Существует потребность в надежном способе двухмерной и трехмерной интерпретации, решающем проблему неустойчивости результатов инверсии для тонких пластов, учитывающем различия в разрешающей способности различных измерений в скважинах и отличающемся высокой скоростью вычислений. Данную потребность обеспечивает настоящее изобретение.
Краткое изложение сущности изобретения
В одном из вариантов осуществления предложен способ определения свойства толщи горных пород. При помощи каротажного прибора, доставляемого в ствол скважины, пробуренной в толще горных пород, получают множество характеризующих свойство толщи горных пород поднаборов данных, поступающих от группы приемников, при этом каждый из поднаборов данных имеет соответствующую разрешающую способность. Осуществляют обработку первого поднабора данных, чтобы получить первую модель толщи горных пород. На основании первой модели и путем обработки другого из поднаборов данных получают двухмерную послойную модель, трехмерную послойную модель и/или двухмерное изображение ствола скважины. Свойством может являться удельное сопротивление толщи горных пород. Данные, поступающие от группы приемников, могут быть получены при помощи прибора индукционного каротажа с использованием множества групп приемников, прибора многокомпонентного индукционного каротажа и/или прибора контактного каротажа. Один из поднаборов может иметь разрешающую способность по горизонтали и/или вертикали, отличающуюся от разрешающей способности другого из поднаборов.
В изобретении также предложено устройство для определения свойства толщи горных пород. Устройство включает каротажный прибор, доставляемый в ствол скважины, пробуренной в толще горных пород, при помощи которого получают два или более характеризующих свойство толщи горных пород поднаборов данных, поступающих от группы приемников, при этом каждый из поднаборов данных имеет соответствующую разрешающую способность. Устройство также включает процессор, который осуществляет обработку первого поднабора данных с получением первой модели, и на основании первой модели и путем обработки другого из поднаборов данных получает двухмерную послойную модель, трехмерную послойную модель и/или двухмерное изображение ствола скважины. Свойством может являться удельное сопротивление толщи горных пород. Каротажным прибором может являться прибор индукционного каротажа с использованием множества групп приемников, прибор многокомпонентного индукционного каротажа и/или прибор контактного каротажа. Один из поднаборов может иметь разрешающую способность по горизонтали и/или вертикали, отличающуюся от разрешающей способности другого из поднаборов. Каротажный прибор может доставляться в ствол скважины на кабеле, с бурильными трубами или на талевом канате.
Кроме того, предлагается машиночитаемый носитель для использования в устройстве для определения свойства толщи горных пород. Это устройство включает каротажный прибор, доставляемый в ствол скважины, пробуренной в толще горных пород, при помощи которого получают множество характеризующих свойство толщи горных пород поднаборов данных, поступающих от группы приемников, при этом каждый из поднаборов данных имеет соответствующую разрешающую способность. Носитель содержит команды, позволяющие процессору осуществлять обработку первого поднабора данных с получением первой модели, и на основании первой модели и путем обработки другого из поднаборов данных получать двухмерную послойную модель, трехмерную послойную модель и/или двухмерное изображение ствола скважины. В качестве носителя может использоваться один из носителей из группы, включающей ПЗУ, СППЗУ, ЭППЗУ, флэш-память и оптический диск.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения к нему приложены чертежи, на которых одинаковые элементы обозначены одинаковыми позициями и на которых:
на фиг.1 показан прибор индукционного каротажа, расположенный в стволе скважины, пробуренной в толще горных пород,
на фиг.2 - результаты инверсии и влияние на модель неверных положений границы,
на фиг.3 - блок-схема, иллюстрирующая один из вариантов осуществления изобретения с использованием вспомогательных переходных слоев,
на фиг.4 - пример, иллюстрирующий вспомогательные переходные слои, используемые в показанном на фиг.3 варианте осуществления,
на фиг.5 - результаты одномерной вертикальной инверсии моделированных данных с использованием точных положений границы в сравнении с результатами одномерной вертикальной инверсии данных отдельных приемников №№0-5 группы приемников,
на фиг.6 - результаты одномерной вертикальной инверсии моделированных данных с использованием вспомогательных переходных слоев,
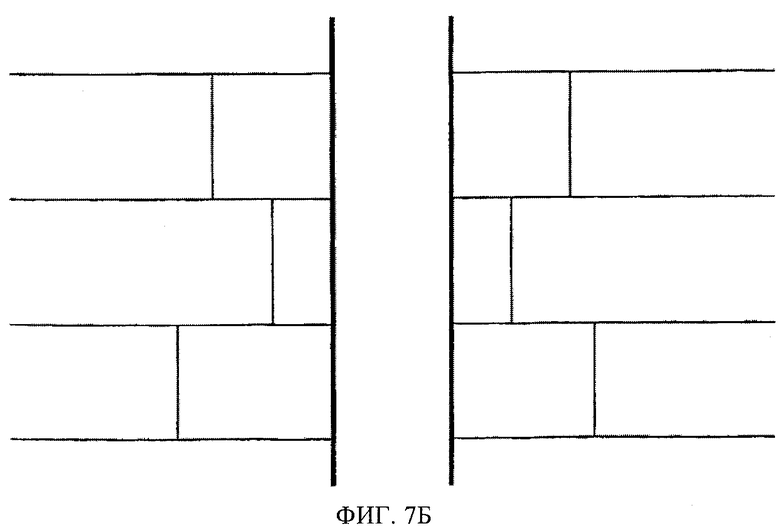
на фиг.7А и 7B - примеры построенных с использованием различных масштабов моделей толщи горных пород с различной разрешающей способностью по вертикали (ствол скважины может быть вертикальным, или искривленным, или горизонтальным),
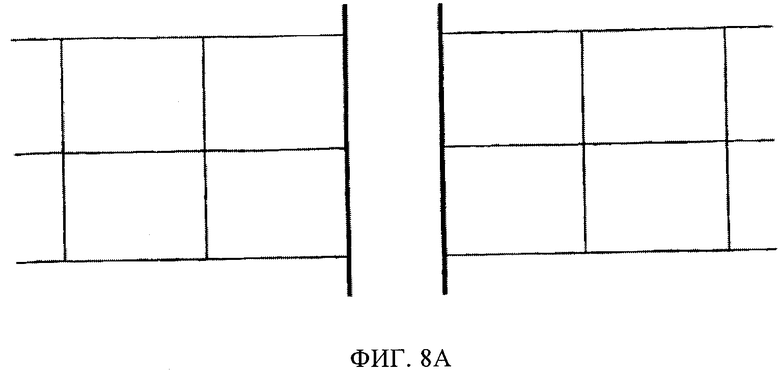
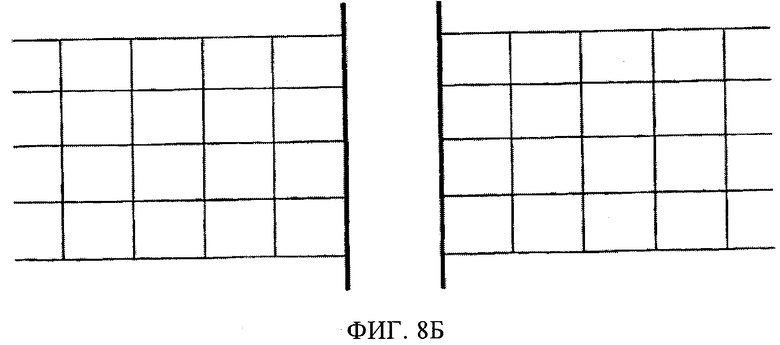
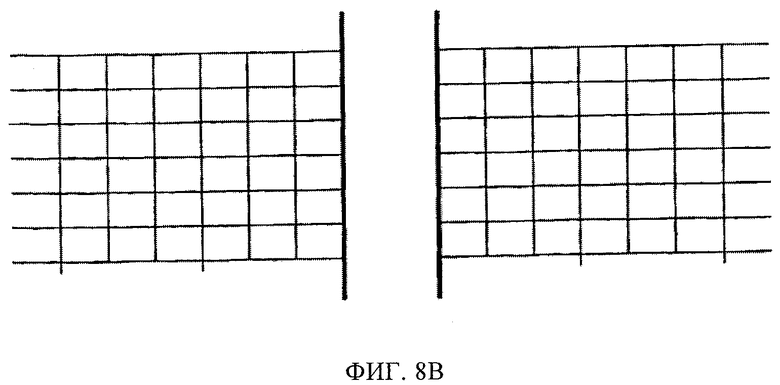
на фиг.8А-8В - примеры построенных с использованием различных масштабов моделей толщи горных пород с различными размерами растровой ячейки,
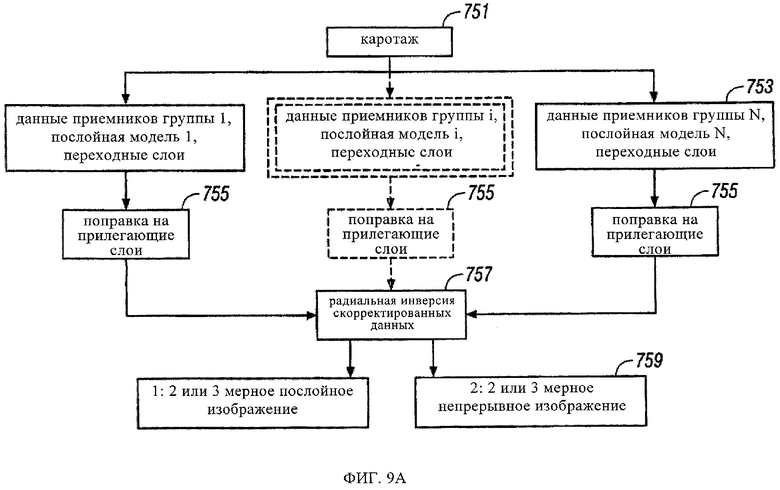
на фиг.9А - блок-схема варианта осуществления изобретения, в котором данные, поступающие от различных приемников или групп приемников со сравнимой разрешающей способностью по вертикали, по отдельности корректируют с использованием различных моделей и посредством радиальной инверсии скорректированных каротажных диаграмм получают выходные результаты в виде двухмерной или трехмерной пластовой модели или двухмерного или трехмерного изображения пласта,
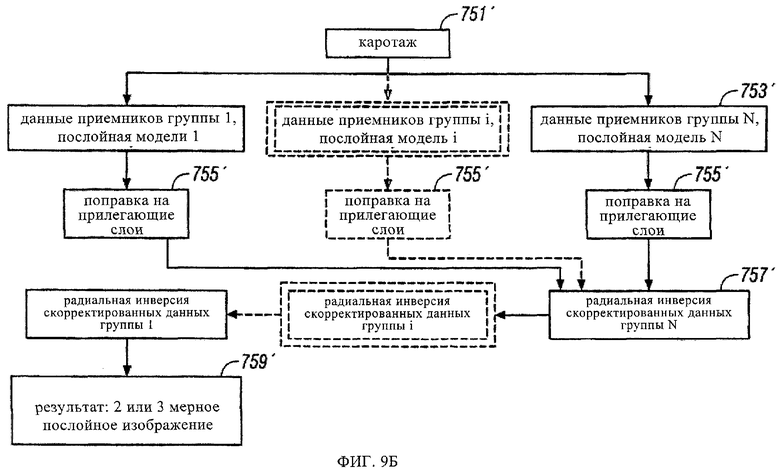
на фиг.9Б - блок-схема варианта осуществления изобретения, в котором данные, поступающие от различных групп приемников со сравнимой разрешающей способностью по вертикали, по отдельности корректируют с использованием различных моделей, и посредством последовательности радиальных инверсий скорректированных каротажных диаграмм, позволяющих постепенно уточнять получаемую послойную модель, получают выходные результаты в виде двухмерной или трехмерной послойной модели,
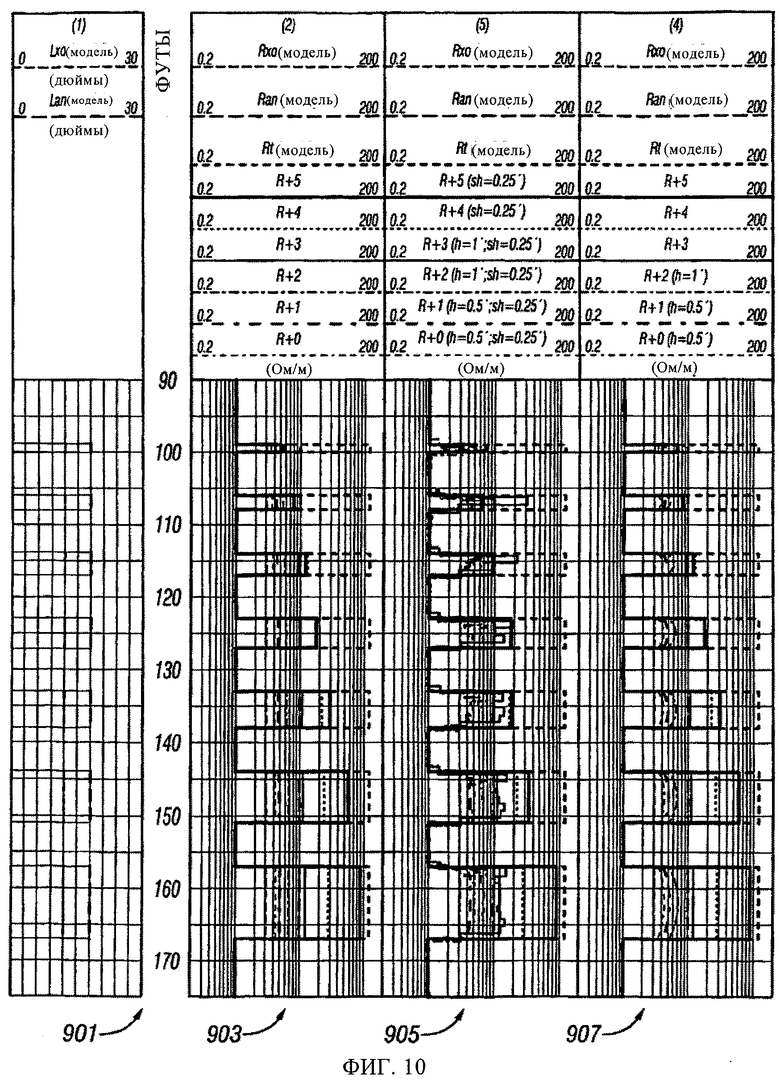
на фиг.10 - пример, иллюстрирующий усовершенствования в результате использования переходных зон,
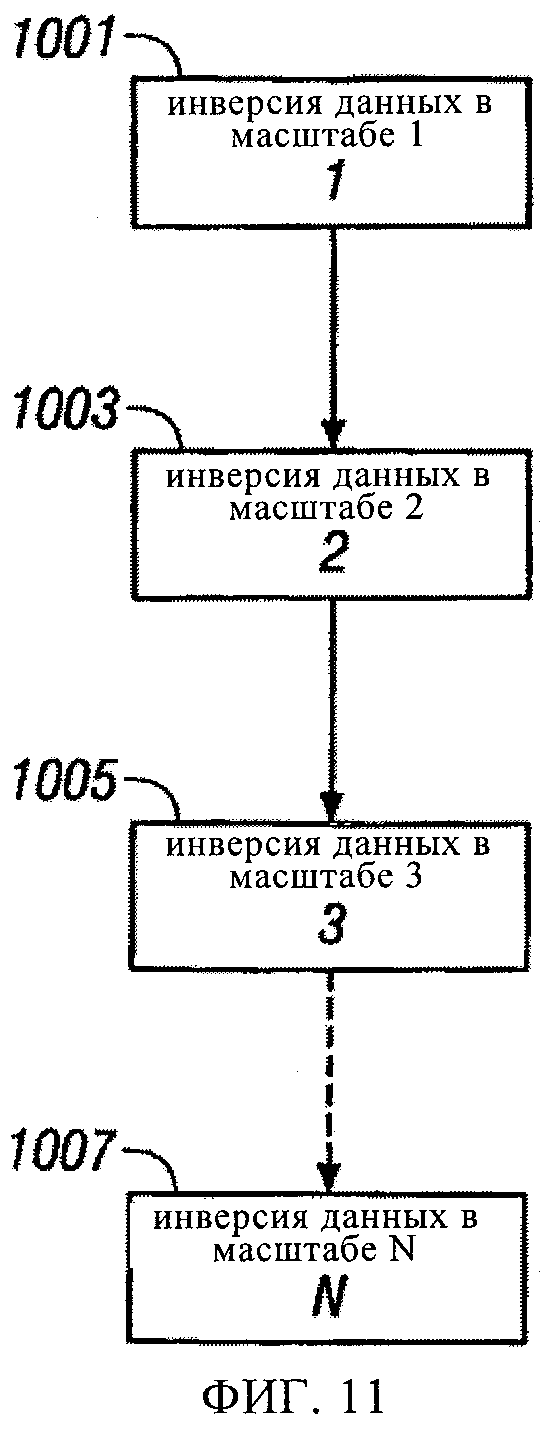
на фиг.11 - блок-схема варианта осуществления изобретения, в котором осуществляют последовательную инверсию с использованием данных, поступающих от группы приемников в различных масштабах, начиная с данных в крупном масштабе,
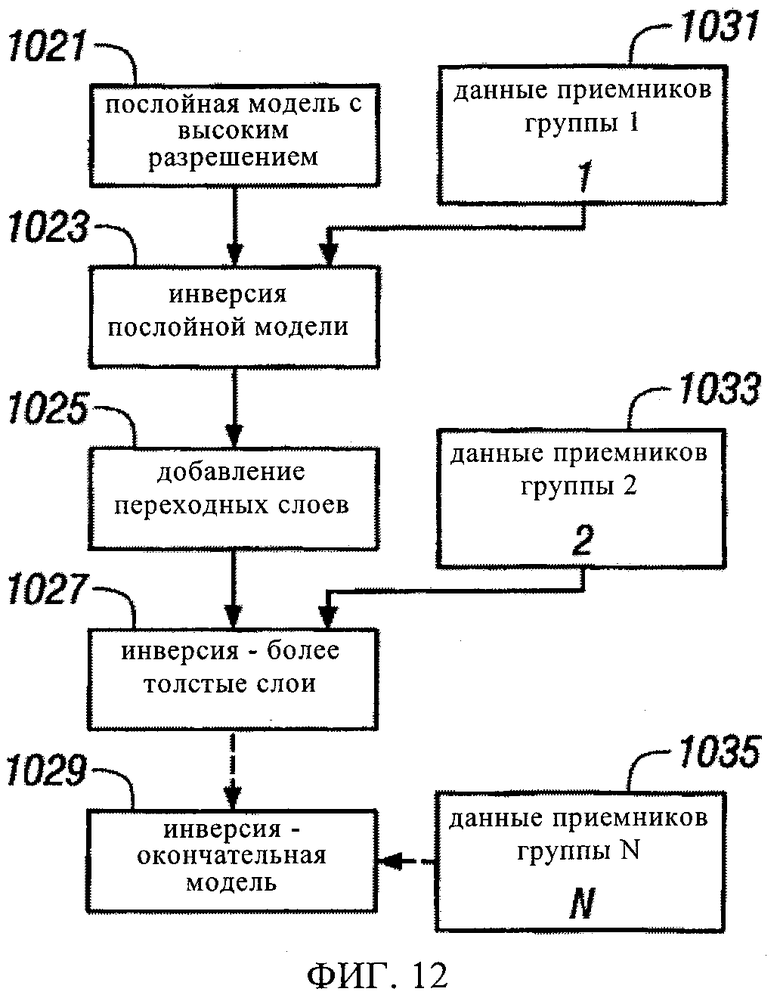
на фиг.12 - блок-схема варианта осуществления изобретения, в котором осуществляют последовательную инверсию с использованием данных, поступающих от группы приемников в различных масштабах, начиная с данных в малом масштабе.
Подробное описание изобретения
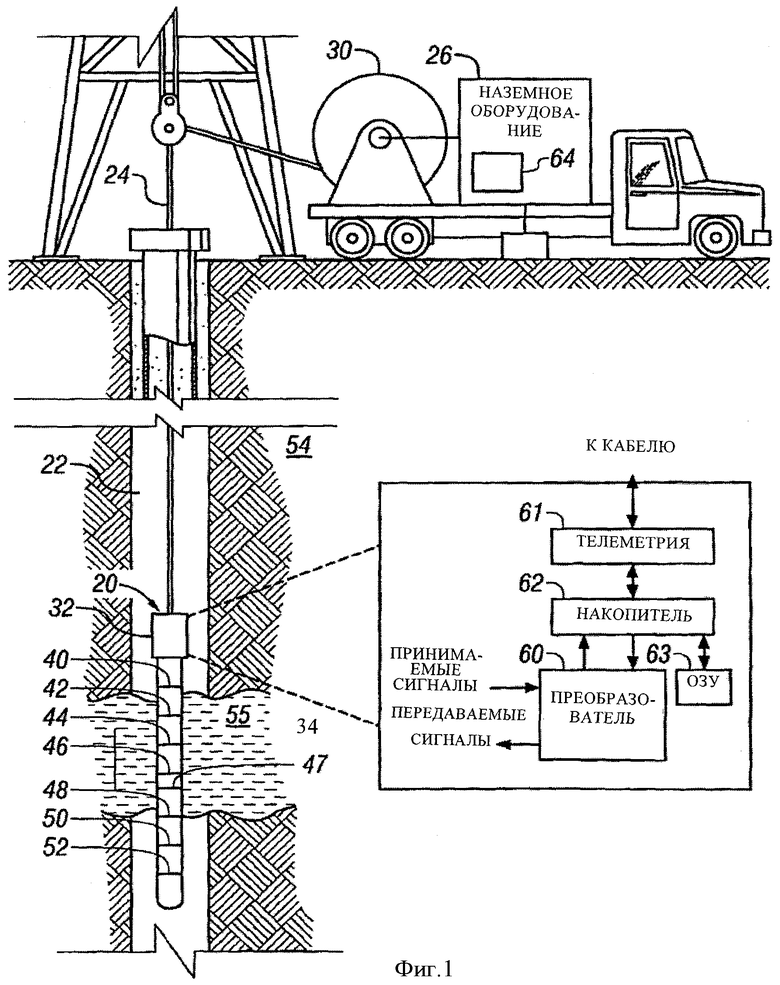
Рассмотрим фиг.1, на которой показан типичный прибор 20 индукционного каротажа, применимый в предложенном в настоящем изобретении способе, который помещен в ствол 22 скважины, пробуренной в толще 54 горных пород. Прибор 20, подвешенный в стволе 22 скважины на кабеле 24, состоит из скважинного зонда 34 и электронной схемы 32. Прибор 20 опускают в ствол 22 скважины на кабеле 24, который предпочтительно проходит через каротажный ролик 31, расположенный на поверхности ствола 22 скважины. Обычно кабель 24 намотан на барабан (не показан). Кабель 24 имеет изолированные токопроводящие жилы для передачи электрических сигналов. Сигналы зонда 34 поступают в электронную схему 32 прибора 20, которая обычно представляет собой процессор. Обработка частично или полностью также может осуществляться наземным процессором или удаленным процессором, соединенным с местом расположения скважины соответствующей линией спутниковой связи.
Зонд 34 предпочтительно состоит из множества катушек 40-52. Катушка 46 является генераторной катушкой для передачи колебательного сигнала в прилегающую толщу 54 горных пород. На катушку 46 предпочтительно подают сигнал с прямоугольной формой волны. Вместе с тем предусмотрено, что может использоваться любой из множества сигналов колебательного напряжения с многочастотными составляющими. Кроме того, желательно, чтобы в отдельных случаях использовался одночастотный сигнал, такой как синусоидальный сигнал. Сигнал колебательного напряжения, подаваемый на катушку 46, генерирует ток в катушке 46, которая, в свою очередь, генерирует электромагнитное поле в окружающей толще 54 горных пород. Электромагнитное поле, в свою очередь, индуцирует токи Фуко, которые направлены соосно стволу 22 скважины. Величины токов Фуко пропорциональны удельной проводимости окружающей толщи 54 горных пород. Остальные катушки 40, 42, 44, 47, 48, 50 и 52 являются приемными катушками, в которых электрические поля, порождаемые токами Фуко, возникающими в толще горных пород, индуцируют сигналы. По мере того как поднимают находящийся в стволе 22 скважины прибор 20, на основе принятых сигналов определяют удельную проводимость окружающей толщи 54 горных пород, чтобы установить пласт или слой 55, удельная проводимость которого указывает на возможность содержания углеводородов. Данную конфигурацию, которая показана лишь в иллюстративных целях, называют прибором индукционного каротажа с высокой разрешающей способностью (HDIL). Существуют другие конфигурации, в частности, в которых генераторные и приемные катушки расположены поперечно оси прибора. Такая конфигурация используется компанией "Бейкер Хьюз" под фирменным наименованием 3DEX, а предложенный в настоящем изобретении способ также применим при измерениях типа 3DEX.
Электронная схема 32 обычно состоит из схемы 60 преобразователя, схемы 62 накопителя, оперативного запоминающего устройства (ОЗУ) 63 и схемы 61 телеметрии. Схема 60 преобразователя имеет множество предусилителей, фильтров и аналого-цифровых преобразователей (АЦП) для приема сигналов, поступающих от приемных катушек 40-52, и их преобразования в оцифрованные сигналы, которые затем обрабатывает схема 62 накопителя. Аналоговые сигналы напряжения, поступающие от приемных катушек 40-52, подвергают дискретизации с предварительно установленной частотой дискретизации в течение времени, заданного основной частотой сигнала передатчика, которая в данном варианте осуществления равна примерно 10 КГц.
Дискретизацию повторяют на протяжении значительного числа периодов передаваемого сигнала напряжения, предпочтительно по меньшей мере 1024 периодов, чтобы улучшить отношение сигнал-шум у принимаемых сигналов. Для уменьшения объема данных, которые необходимо хранить или передавать, суммируют соответствующие выборки цифрового сигнала, полученные за каждый из периодов передачи. Суммированные выборки цифрового сигнала, которые соответствуют каждой из множества приемных катушек, образуют соответствующие выборки сигнала, полученные в результате суммирования, которые хранят в ОЗУ 63. Затем сигналы после суммирования, которые соответствуют множеству приемных катушек 40-52, могут быть извлечены из ОЗУ 63 и по кабелю 24 переданы схемой 61 телеметрии компьютеру (процессору) 64, являющемуся частью наземного оборудования 26, которое может осуществлять анализ сигналов после суммирования.
В альтернативном варианте осуществления процессор с достаточной производительностью обработки цифровых сигналов может являться частью электронной схемы 32. Так, предусмотрена возможность осуществления анализа данных в стволе скважины, за счет чего дополнительно уменьшается объем данных, передаваемых на поверхность. Следует отметить, что описание прибора индукционного каротажа имеет лишь иллюстративные цели, а предложенный в настоящем изобретении способ также применим с приборами контактного каротажа, которые упомянуты выше при описании уровня техники.
Можно считать, что настоящее изобретение основано на двух концепциях, которые могут быть по отдельности реализованы в автономном режиме. В качестве альтернативы, в изобретении могут быть полностью или частично реализованы обе концепции. По этой причине обе концепции рассмотрены по отдельности и затем показано, например, применение обеих концепций при интерпретации данных индукционного каротажа сопротивления с использованием множества групп приемников. Следует отметить, что предложенный способ не ограничен данными индукционного каротажа сопротивления.
Первая концепция представляет собой методику надежной инверсии при неточно определенных границах пластов. Определение границ пластов является основой любого процесса инверсии, поскольку при инверсии обычно используют модели с постоянными свойствами толщи горных пород в зоне границ пластов. Такая модель с кусочно-постоянными величинами удельного сопротивления имеет значительно меньше параметров, чем модель, в которой значения удельного сопротивления могут неограниченно меняться в зависимости от глубины залегания. Это также относится к моделям с кусочно-гладкими величинами удельного сопротивления. Более вероятно, что результаты инверсии будут отличаться неустойчивостью и неоднозначностью для модели с большим числом параметров, чем для модели с меньшим числом параметров. Возможные проблемы, связанные с данным подходом, проиллюстрированы на примере.
В известном из уровня техники способе, которым определяют глубину залегания возможных границ, используют скорость изменения набора каротажных кривых в зависимости от глубины. Границы проходят там, где скорость изменения входной кривой (или единая скорость изменения при наличии нескольких входных кривых) является максимальной. Обычно чувствительность способа можно регулировать путем установления порога скорости изменения для обнаружения нескольких границ слоев в пределах зоны или длительности окна. На практике сложно точно уловить границы толщ горных пород с использованием необработанных каротажных данных. Таким образом, способы, основанные на скорости изменения, могут в лучшем случае обеспечить приблизительные (исходные) оценки границ пластов. Для уточнения расположения границ слоев в принципе могут использоваться способы точной инверсии. С учетом увеличенного числа неизвестных параметров модели увеличивается потребность в вычислительных ресурсах. Кроме того, для одновременного определения свойств толщи горных пород и границ слоев может потребоваться эквивалентное решение.
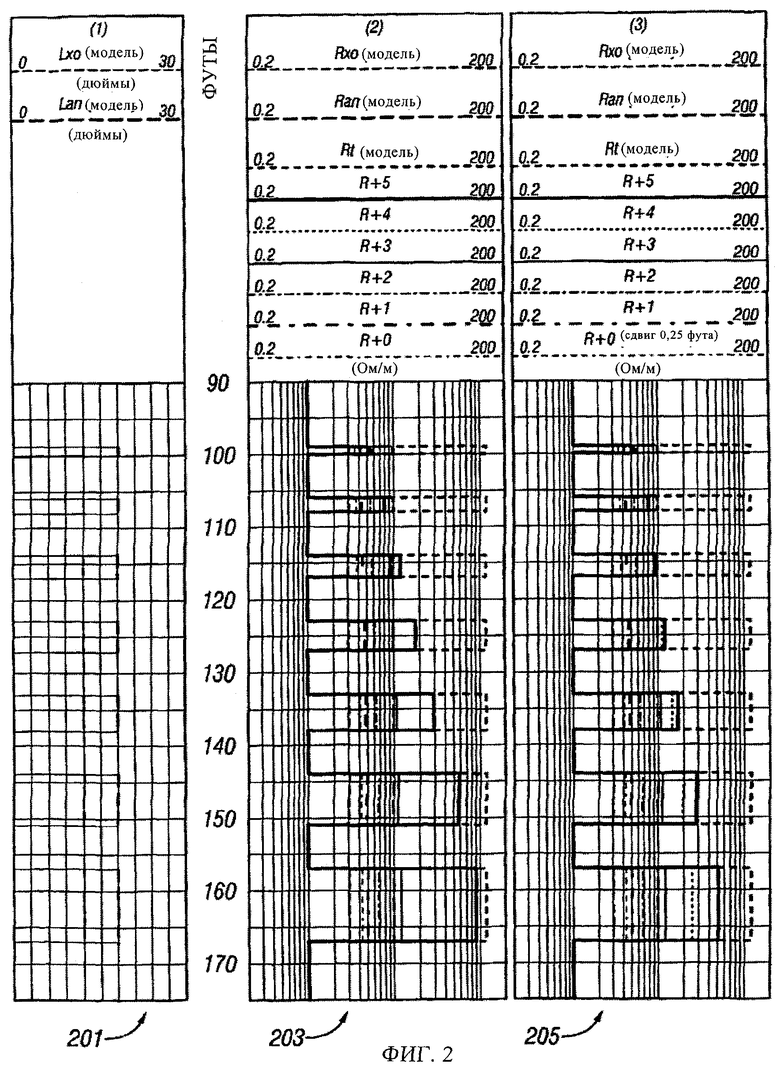
Показанные на фиг.2 дорожки 1 и 2 (201 и 203) соответствуют искусственной базовой модели. Радиальный профиль зоны проникновения относится к кольцевому типу. Величины удельного сопротивления прилегающего пласта, зоны проникновения, окаймляющей зоны и толщи горных пород равны 1, 3, 10 и 120 Ом/м соответственно; Lxo=12 дюймов (30,48 см) и Lan=6 дюймов (15,24 см). На дорожке 2 пунктирными линиями показаны величины удельного сопротивления, а на дорожке 1 показана протяженность зон.
На дорожке 2 (203) проиллюстрированы результаты инверсии (сплошные линии), исходя из предположения известности расположения границы слоя. Показана одномерная вертикальная инверсия каротажных данных, поступающих от отдельных приемников прибора индукционного каротажа с высокой разрешающей способностью (HDIL), с использованием модели пласта без проникновения. Результаты инверсии каротажных диаграмм Rt0-Rt5, полученных при помощи приемников HDIL, значительно различаются в тонких и толстых слоях (дорожка 2) из-за влияний прилегающего пласта и проникновения. Если бы эти результаты были использованы в качестве входных данных в комплексной радиальной одномерной инверсии, результат не отражал бы истинную модель пласта во всех слоях, за исключением пласта на глубине 10 футов (3,05 м). Кроме того, результаты значительно различались бы в тонких (до 3 футов или 0,985 м) и толстых (более 3 футов или 0,985 м) слоях.
На дорожке 3 (205) проиллюстрированы результаты одномерной инверсии, если положение нижней границы каждого слоя с проникновением сдвинуто лишь на одну выборку (0,25 фута или 7,62 см) вниз от точного положения. Последовательность результатов инверсии может стать неверной в тонких слоях, а результаты инверсии в целом существенно отличаются от предыдущих результатов (если сравнить дорожку 2 (203) и дорожку 3 (205)).
Для исключения колебаний и внезапных скачков поблизости от неточно определенных границ в публикации Smits предложено использовать условие гладкости при инверсии данных прибора бокового каротажа с использованием группы приемников. Применение условия гладкости при комплексной инверсии необязательно уменьшает потребность в вычислительных ресурсах. Из-за разной разрешающей способности по вертикали каротажных диаграмм, используемых в процессе интерпретации, при инверсии также может потребоваться найти эквивалентное (неверное) решение. В одном из вариантов осуществления настоящего изобретения предложен усовершенствованный способ определения границ слоя. Он проиллюстрирован на блок-схеме, которая показана на фиг.3.
На шаге 251 осуществляют первоначальную оценку границ пласта с использованием известных из уровня техники способов, таких как способы, основанные на скорости изменения каротажной кривой в зависимости от глубины. В результате может быть получено, например, в общей сложности N слоев. На шаге 253 выше и ниже первоначально оцененных границ пласта вводят переходные слои. В результате получают в общей сложности 2N-2 дополнительных слоев. Толщина переходных слоев является параметром способа и может быть оценена в зависимости от точности результатов выделения слоя. Обычная толщина переходных слоев составляет 0,25 фута (7,62 см). На основании данной модели, состоящей из 3N-2 слоев, на шаге 255 осуществляют раздельную или комплексную инверсию всех данных, полученных от множества приемников. Инверсия может быть обусловленной инверсией, в которой значения удельного сопротивления переходной зоны должны находиться в диапазоне значений удельного сопротивления прилегающих слоев. Данное условие проиллюстрировано на фиг.4.
На фиг.4 показаны два переходных слоя 303, 305, которые введены на границе между слоями 301, 307. Удельные сопротивления слоев 301 и 307 обозначены как
Ra и Rb соответственно. Для обусловленной инверсии необходимо, чтобы удельные сопротивления Rtr1 и Rtr2 находились между Ra и Rb или отвечали любому из следующих условий:
Ra>Rtr1, Rtr2>Rb или
Ra<Rtr1, Rtr2<Rb
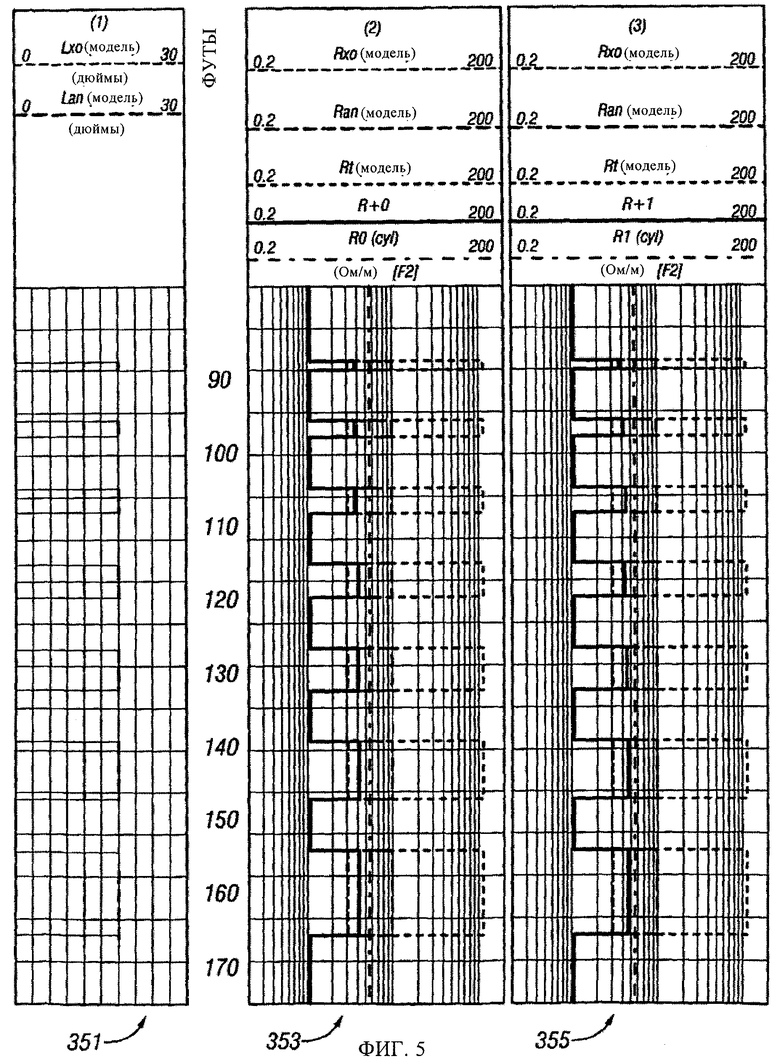
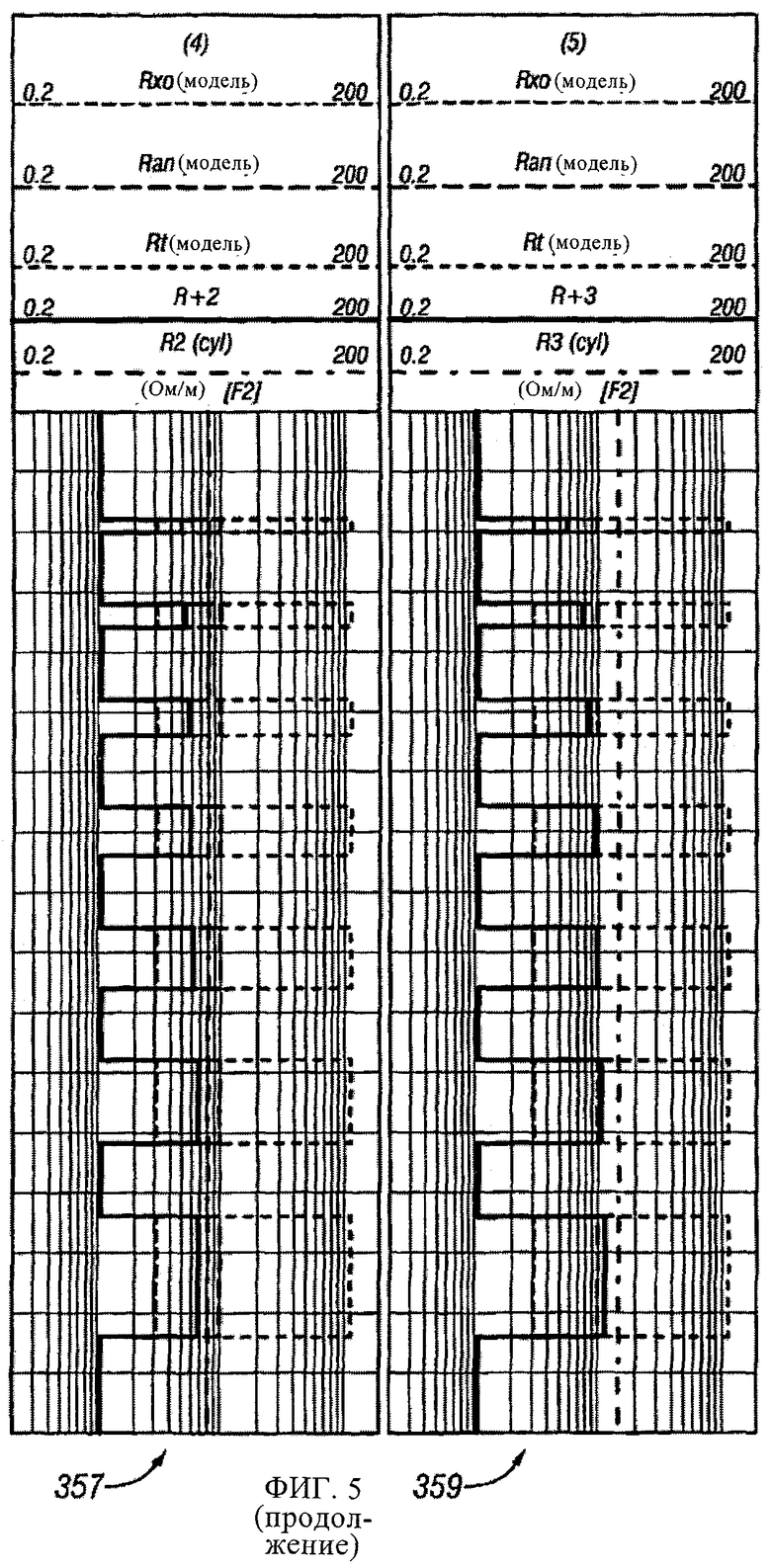
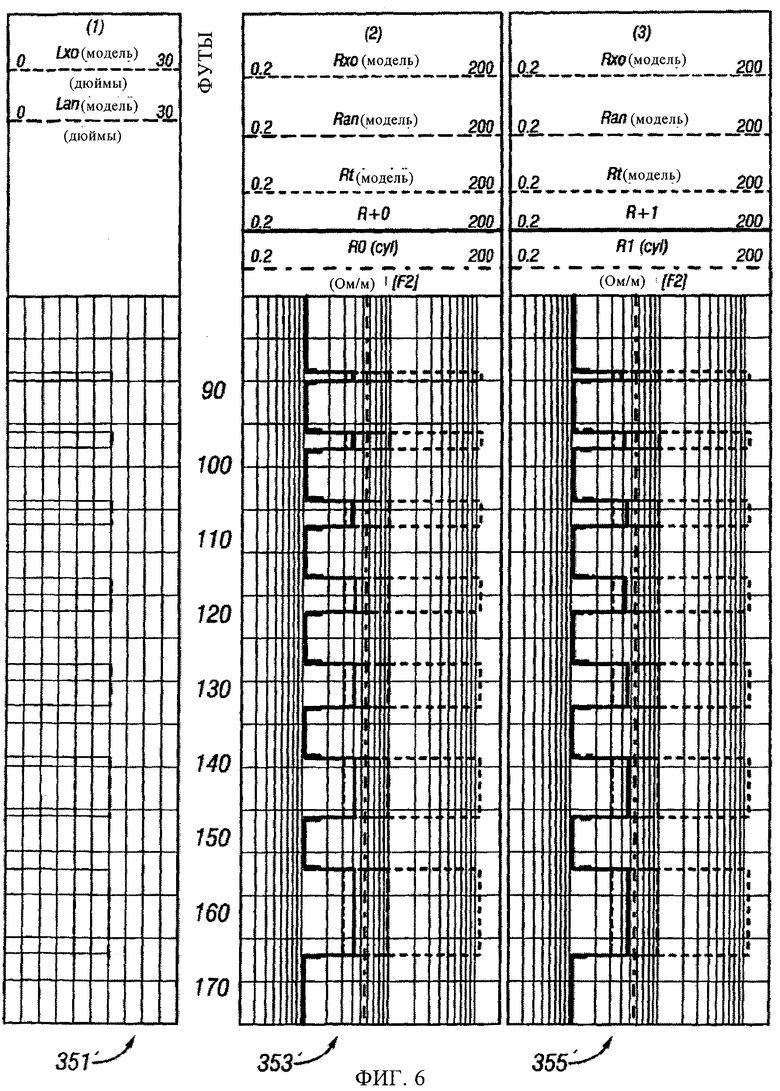
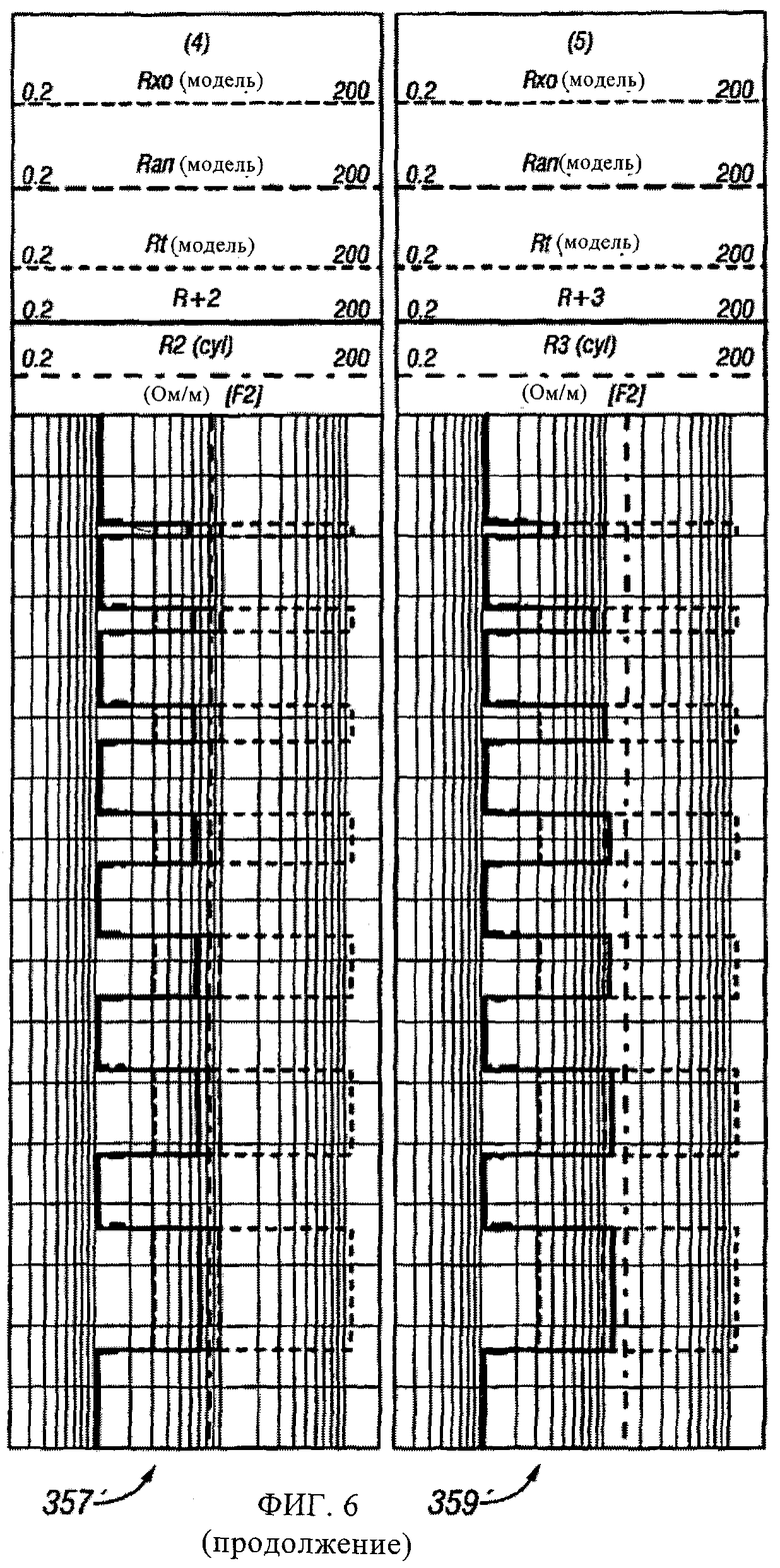
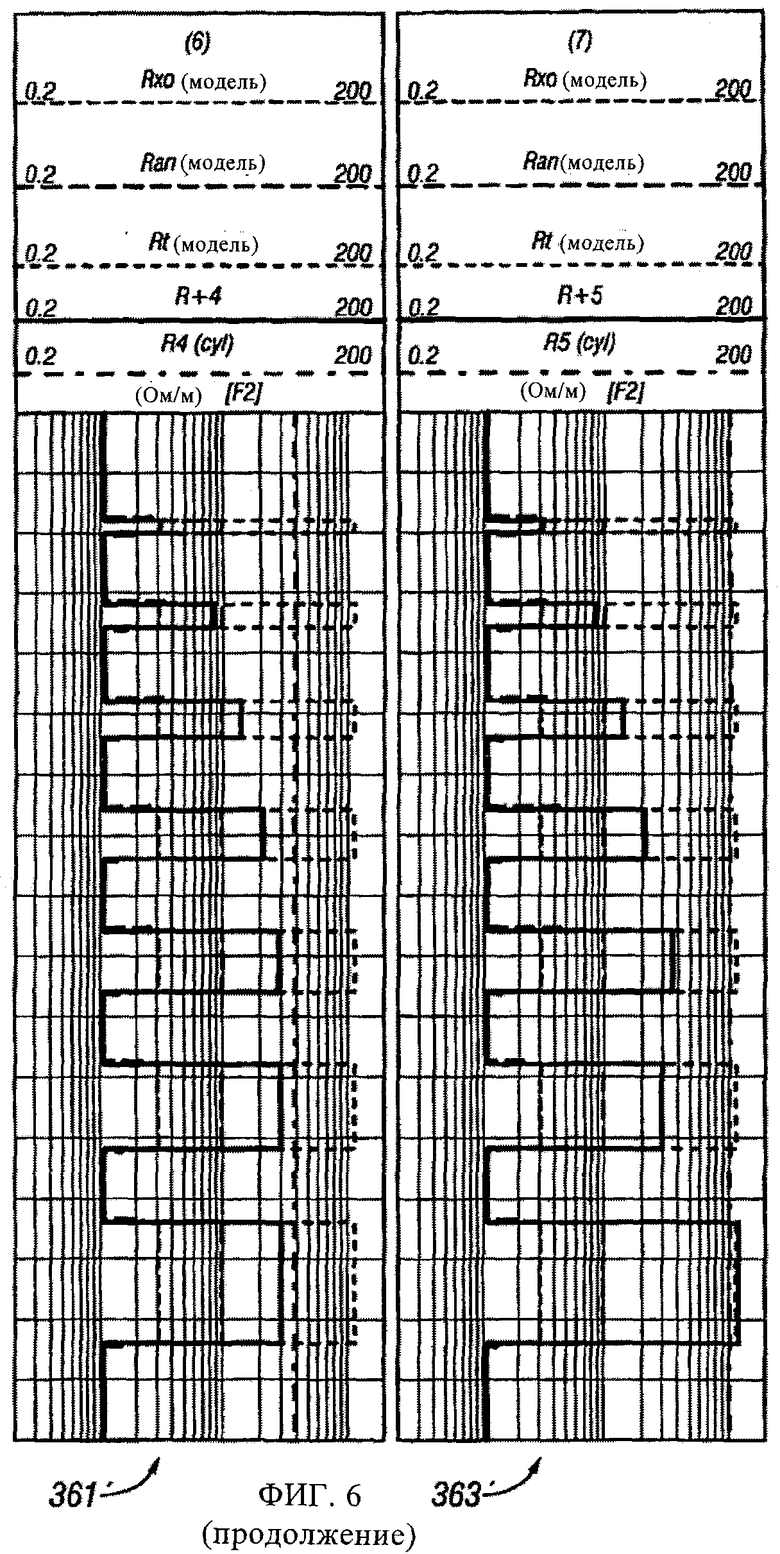
На фиг.5 показаны семь дорожек. Позицией 351 обозначена модель инверсии. Пунктирными линиями на дорожках 353-363 показаны удельные сопротивления для модели. На дорожках 353-363 также проиллюстрированы результаты инверсии данных, поступающих от отдельных приемников №№0-5 группы приемников. Показаны результаты инверсии, осуществленной двумя различными способами: один результат соответствует двухмерной инверсии, а другой результат соответствует одномерной цилиндрической модели. По существу, чем ближе результаты одномерной инверсии к данным цилиндрического моделирования, тем меньше в инвертированных данных присутствует влияние окружающей среды. Если инвертированное удельное сопротивление Rt остается на одинаковом уровне во множестве слоев, это указывает на толщи горных пород, в которых на последующей стадии радиальной инверсии могут использоваться эти результаты инверсии данных, поступающих от группы приемников.
Например, в рассматриваемом примере модели в результате инверсии данных, поступающих от приемников №2 и №3, группы приемников получают почти одинаковые показания, начиная со слоев h=3 фута (0,914 м) и h=5 футов (1,524 м) соответственно. Эти результаты показывают, что применение метода 1D+1D с использованием комплексной инверсии данных, поступающих от всех приемников группы, и одной модели толщи горных пород может привести к получению неверной двухмерной модели толщи горных пород.
На фиг.6 показано влияние на результаты инверсии переходных зон, расположенных между слоями. Как показывает моделирование, влияние прилегающих пластов на результаты инверсии уменьшилось. Таким образом, введение переходных зон между слоями не только стабилизирует процесс инверсии, но также уменьшает влияние окружающей среды. Позицией 351' обозначена модель проникновения. Пунктирными линиями на дорожках 353'-363' обозначены удельные сопротивления. На дорожках 353'-363' также проиллюстрированы результаты инверсии данных, поступающих от отдельных приемников №№0-5 группы приемников. Показаны результаты инверсии, осуществленной двумя различными способами: один из результатов соответствует двухмерной инверсии, а другой результат соответствует одномерной цилиндрической модели (прямая линия).
Вторая концепция, используемая в настоящем изобретении, основана на признании того, что различные приемники группы приемников имеют различную разрешающую способность и различную глубину исследования толщи горных пород. Соответственно, при осуществлении комплексной инверсии информация с высокой разрешающей способностью, поступающая от менее удаленных приемников, теряется из-за более низкой разрешающей способности более удаленных приемников. Аналогичным образом, более удаленные приемники имеют большую глубину исследования толщи горных пород, чем менее удаленные приемники, и, следовательно, более важны для глубинной части модели, чем менее удаленные приемники.
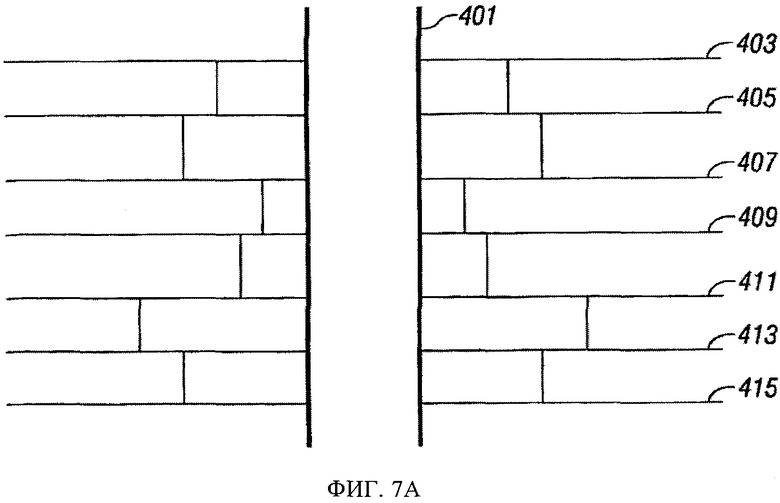
Концепция разрешающей способности схематически показана на фиг.7А, на которой проиллюстрирована модель, которая может быть получена на основании каротажных данных, поступающих от менее удаленных приемников, и использована для их инверсии. Показан ствол 401 скважины и границы 403, 405, 407, 409, 411, 413 и 415 слоев. Ствол 401 скважины может быть вертикальным, или искривленным, или горизонтальным. На фиг.7А также показаны зоны проникновения для каждого из слоев. Проведем сравнение с фиг.7Б, на которой показана модель, которая может быть получена на основании каротажных данных, поступающих от более удаленных приемников. В иллюстративных целях на фиг 7А и 7Б показаны только две модели. В реальности моделей может быть больше, и их число может достигать числа приемников, используемых для регистрации данных. Это является частным примером построенных с использованием различных масштабов моделей толщи горных пород с упором на разрешающую способность по вертикали.
Сочетание разрешающей способности по вертикали и глубины исследования проиллюстрировано на примерах, показанных на фиг.8А-8В. На фиг.8А показана модель двухмерной или трехмерной инверсии с растровыми ячейками большого размера. Ячейки модели, показанной на фиг.8Б, имеют меньший размер, а ячейки модели, показанной на фиг.8В, - еще меньший размер. Каждая из моделей применима для двухмерной или трехмерной инверсии данных, поступающих от отдельного приемника.
С учетом данных концепций в настоящем изобретении предложено несколько последовательностей действий. Как показано на фиг.9А, на шаге 751 получают каротажные данные от множества групп приемников. Это может быть сделано с использованием, например, прибора HDIL, описанного в US 5452761. На шаге 753 осуществляют обработку данных, поступающих от каждого приемника 1, i, N. Несмотря на использование термина "слой без проникновения", способ также применим при наличии изменений лучевой скорости, например, из-за проникновения. Подразумевается, что вместо обработки данных, поступающих от каждого приемника по отдельности, на шаге 753 может по отдельности осуществляться обработка данных, поступающих от групп приемников, относящихся к общей модели. На шаге 755 к каждому приемнику (или группе приемников) необязательно применяют поправку на влияние прилегающих слоев. За счет применения поправки на влияние прилегающих слоев получают обработанные каротажные данные, полученные от соответствующего приемника или группы приемников. На шаге 757 осуществляют радиальную инверсию, чтобы определить получаемое на шаге 759 двухмерное или трехмерное послойное изображение толщи горных пород или двухмерное или трехмерное непрерывное изображение толщи горных пород. Данную радиальную инверсию можно считать дополнительной обработкой полученных на шаге 755 обработанных каротажных данных. В одном из вариантов осуществления изобретения выбирают наиболее тонкий слой, осуществляют радиальную инверсию по центру каждого слоя с использованием кусочно-постоянного профиля радиального удельного сопротивления. Это позволяет определять параметры проникновения (Lxo, Rxo), окаймляющей зоны (Lan, Ran) и зон без проникновения (Rt). Радиальная инверсия также может быть осуществлена на каждом ряду ячеек с целью определения кусочно-постоянного изображения толщи горных пород. Наконец, радиальная инверсия может быть осуществлена в точке каротажа с целью определения непрерывного изображения толщи горных пород в радиальном и вертикальном направлениях. Термины "проникновение", "окаймляющая зона" и "зона без проникновения" используются лишь в иллюстративных целях, поскольку данные зоны обычно расположены внутри и вокруг ствола скважины. Изобретение позволяет определять удельное сопротивление в зависимости от расстояния от ствола скважины независимо от того, как называются зоны.
На фиг.9Б показана другая применимая блок-схема. Предусмотрено, что на шаге 753' по отдельности осуществляют обработку данных, поступающих от приемников групп 1, i, N, относящихся к одной модели. Несмотря на использование термина "слой без проникновения", способ также применим при наличии изменений лучевой скорости, например, из-за проникновения. На шаге 755' к каждому приемнику (или группе приемников) применяют поправку на влияние прилегающих слоев. За счет этого получают обработанные каротажные данные, поступающие от соответствующего приемника или группы приемников. На шаге 757' осуществляют радиальную инверсию, начиная с группы наиболее удаленных приемников. На следующем шаге инверсии используют результаты инверсии, полученные на предыдущем шаге. Таким способом осуществляют постепенное, быстрое и устойчивое уточнение модели и получают двухмерное или трехмерное послойное изображение структуры толщи горных пород или двухмерную или трехмерную ячеечную структуру (изображение) толщи горных пород с максимальной разрешающей способностью по вертикали. Последовательная радиальная инверсия отличается от проиллюстрированной на фиг.9А комплексной радиальной инверсии, которую осуществляют на шаге 757, но тем не менее ее можно считать дополнительной обработкой обработанных каротажных данных, поступающих от каждого приемника или группы приемников.
Следует отметить, что в описанных выше и показанных на фиг.9А и 9Б алгоритмах инверсии и построения изображения могут использоваться построенные с использованием различных масштабов модели толщи горных пород, проиллюстрированные на фиг.7 и 8.
В одном из вариантов осуществления изобретения, исходя из приведенных выше результатов, для радиальной инверсии на каждом слое, включая самый тонкий слой в 1 фут, используют данные, поступающие от приемников №№0-1. Каротажные данные, поступающие от приемников №№2, 3, 4 и 5, могут использоваться, например, для инверсии на слоях толщиной 2 фута, 3 фута, 7 футов и >7 футов соответственно.
Рассмотрим фиг.10, на которой приведены типичные результаты. Дорожки 901 и 903 не отличаются от показанных на фиг.2 дорожек 201 и 203 (т.е. иллюстрируют модель удельного сопротивления и результаты одномерной инверсии данных различных приемников). На дорожке 905 проиллюстрированы результаты инверсии построенной с использованием различных масштабов модели, в которой границы слоев смещены относительно их истинного положения на одну выборку (0,25 фута), слои имеют постоянную толщину и не используются переходные зоны между слоями. Полученные результаты инверсии данных, поступающих от различных приемников, являются совершенно неправильными и нестабильными. В отличие от этого на дорожке 907 проиллюстрированы результаты, полученные описанным выше способом с использованием переходных зон. Результаты являются стабильными и точно оценивающими истинное удельное сопротивление толщи горных пород.
На фиг.11 проиллюстрирован другой вариант осуществления изобретения, рассмотренный со ссылкой на фиг.8А-8В. Данный вариант осуществления особо эффективен при построении изображений. На шаге 1001 инверсия данных, поступающих от большой группы приемников, получают разреженную сетку, такую как показана на фиг.8А. Затем результаты инверсии используют в качестве начальной оценки для осуществляемой на шаге 1003 инверсии данных, поступающих от другой группы приемников, и получают менее разреженную сетку, такую как показана на фиг.8Б. Инверсию повторяют на шагах 1005, 1007, чтобы на шаге 1007 получить окончательную инвертированную модель мелкого масштаба, такую как показана на фиг.8В. Каждая из инверсий 1003, 1005…1007 может представлять собой инверсию дополнительных анализируемых данных или комплексную инверсию, включая данные, подвергнутые анализу на предыдущих стадиях. Это является примером инверсии с использованием различных масштабов от более крупного масштаба к более мелкому масштабу.
В другом варианте осуществления изобретения инверсия в противоположном направлении, т.е. от более мелкого масштаба к более крупному масштабу. Это проиллюстрировано на фиг.12. Процесс начинают на шаге 1021 с использованием послойной модели с высокой разрешающей способностью, которая может быть получена при помощи скважинного прибора микрокаротажа. Полученные данные описывают исходную модель для осуществляемой на шаге 1023 инверсии данных 1031 послойной модели с высокой разрешающей способностью, которые поступают от первой группы приемников. На шаге 1025 или позднее в процессе обработки могут быть добавлены переходные слои. Затем на шаге 1027 инверсия данных 1033 более мелкого масштаба, поступающих от второй группы приемников, чтобы создать модель с более толстыми слоями. Данный процесс может быть повторно осуществлен для обработки данных дополнительных групп приемников и получения на шаге 1029 окончательной инвертированной модели.
Описанные выше различные варианты осуществления изобретения объединяет то, что все они служат для определения удельной проводимости толщи горных пород. Получают данные, поступающие от множества групп приемников, находящихся на различных расстояниях от передатчика. Создают множество моделей удельного сопротивления. Каждая из моделей удельного сопротивления соответствует поднабору данных, поступающих от множества групп приемников. Осуществляют обработку каждого поднабора данных с использованием модели, которая ему соответствует, чтобы получить множество частично обработанных наборов данных. На основании частично обработанных наборов данных определяют свойство толщи горных пород.
Обработка данных измерений, осуществляемых датчиком на кабеле, может осуществляться наземным процессором 64 или скважинным процессором (не показан). В случае измерений в процессе бурения обработка может осуществляться скважинным процессором, который является частью КНБК. При осуществлении обработки в скважине уменьшается объем данных для передачи телеметрическим путем. В качестве альтернативы, данные частично или полностью могут быть переданы на поверхность телеметрическим путем.
Работой передатчика и приемников может управлять скважинный процессор и/или наземный процессор. Управление данными и обработка данных подразумевает использование компьютерной программы, реализованной на соответствующем машиночитаемом носителе, позволяющем процессору осуществлять управление и обработку. Машиночитаемый носитель может включать постоянное запоминающее устройство (ПЗУ), стираемое программируемое ПЗУ (СППЗУ), электрически программируемое ПЗУ (ЭППЗУ), флэш-память и оптический диск.
Предложенный в настоящем изобретении способ рассмотрен выше применительно к измерениям, которые осуществляет опускаемый на кабеле прибор индукционного каротажа с множеством групп приемников. Изобретение не ограничено данным применением, и предложенный в изобретении способ в равной мере применим к измерениям 3DEX, которые осуществляют прибор многокомпонентного каротажа, и измерениям, которые осуществляет прибор для измерений в процессе бурения, доставляемый на компоновке бурильной колонны или гибких НКТ малого диаметра. Способ также применим для обработки данных, получаемых при помощи датчиков контактного метода. Следует дополнительно отметить, что определение удельного сопротивления с точки зрения настоящего изобретения означает то же, что и определение удельной проводимости.
Несмотря на то что выше описаны предпочтительные варианты осуществления изобретения, в него могут быть внесены различные изменения, очевидные для специалистов в данной области техники. Предполагается, что все такие изменения, не выходящие за рамки прилагаемой формулы изобретения, охвачены объемом изобретения.


Предложенная группа изобретений относится к геофизическим методам исследования горных пород, в частности к способу и устройству определения свойств толщи горных пород. Техническим результатом является повышение точности и надежности получаемой информации о пластах горных пород при обработке данных каротажа. Способ определения свойств толщи горных пород включает следующие этапы: при помощи каротажного прибора получают множество характеризующих свойство толщи горных пород поднаборов данных от группы приемников, при этом каждый из поднаборов данных имеет соответствующую разрешающую способность; осуществляют обработку первого поднабора данных, поступающих от группы приемников, чтобы получить первую модель толщи горных пород; на основании первой модели и путем обработки, по меньшей мере, одного из поднаборов данных, помимо первого поднабора данных, получают, по меньшей мере, одну из моделей, включающих двухмерную послойную модель толщи горных пород, трехмерную послойную модель толщи горных пород и двухмерное изображение ствола скважины. Устройство для определения свойств толщи горных пород включает каротажный прибор, процессор и машиночитаемый носитель, содержащий команды, позволяющие процессору осуществлять необходимую обработку данных для получения окончательной модели толщи горных пород и двухмерное изображение ствола скважины. 3 н. и 28 з.п. ф-лы, 18 ил.
1. Способ определения свойства толщи горных пород, в котором:
а) при помощи каротажного прибора, доставляемого в ствол скважины, пробуренной в толще горных пород, получают множество характеризующих свойство толщи горных пород поднаборов данных от группы приемников, при этом каждый из поднаборов данных имеет соответствующую разрешающую способность,
б) осуществляют обработку первого поднабора данных, поступающих от группы приемников, чтобы получить первую модель толщи горных пород,
в) на основании первой модели и путем обработки, по меньшей мере, одного из поднаборов данных помимо первого поднабора данных получают, по меньшей мере, одну из моделей, включающих двухмерную послойную модель толщи горных пород, трехмерную послойную модель толщи горных пород и двухмерное изображение ствола скважины.
2. Способ по п.1, в котором она стадии (в) дополнительно осуществляют проводимую по отдельности обработку каждого из множества поднаборов данных.
3. Способ по п.1, в котором в качестве свойства толщи горных пород определяют удельное сопротивление.
4. Способ по п.3, в котором дополнительно получают данные от группы приемников при помощи, по меньшей мере, одного из приборов, включающих прибор индукционного каротажа с использованием множества групп приемников, прибор многокомпонентного индукционного каротажа и прибор контактного каротажа.
5. Способ по п.1, в котором множество поднаборов данных выбирают из группы, включающей данные, поступающие от приемника, входящего в группу приемников, и данные, поступающие от группы приемников.
6. Способ по п.2, в котором дополнительно осуществляют проводимую по отдельности обработку других поднаборов данных, которая предусматривает, по меньшей мере, одну из группы, включающей обработку с использованием переходного слоя в модели, обработку с использованием модели без проникновения и обработку с поправкой на влияние прилегающих слоев.
7. Способ по п.1, в котором осуществляют радиальную инверсию.
8. Способ по п.7, в котором осуществляют комплексную или последовательную инверсию.
9. Способ по п.1, в котором, по меньшей мере, один из поднаборов данных имеет разрешающую способность по вертикали, отличающуюся от разрешающей способности по вертикали другого из поднаборов данных.
10. Способ по п.1, в котором, по меньшей мере, один из поднаборов данных имеет разрешающую способность по горизонтали, отличающуюся от разрешающей способности по горизонтали другого из поднаборов данных.
11. Способ по п.1, в котором дополнительно осуществляют проводимую по отдельности обработку других поднаборов данных с использованием, по меньшей мере, одной из инверсий, включающих одномерную инверсию и обусловленную инверсию.
12. Способ по п.1, в котором дополнительно осуществляют проводимую по отдельности обработку других поднаборов данных путем инверсии для определения границ переходных слоев, расположенных выше и ниже первоначально оцененной границы пласта.
13. Способ по п.1, в котором первую модель используют в качестве исходной модели на стадии (в).
14. Способ по п.13, в котором обработка на стадии (в) дополнительно предусматривает осуществление, по меньшей мере, одной из инверсий, включающих раздельную инверсию и комплексную инверсию.
15. Способ по п.13, в котором первый поднабор данных имеет меньшую разрешающую способность, чем разрешающая способность любого из других поднаборов данных.
16. Способ по п.13, в котором первый поднабор данных имеет большую разрешающую способность, чем разрешающая способность любого из других поднаборов данных.
17. Устройство для определения свойства толщи горных пород, включающее:
каротажный прибор, доставляемый в ствол скважины, пробуренной в толще горных пород, для получения множества характеризующих свойство толщи горных пород поднаборов данных от группы приемников, при этом каждый из поднаборов данных имеет соответствующую разрешающую способность, и процессор, способный осуществлять
а) обработку первого поднабора данных с получением первой модели, и
б) на основании первой модели и путем обработки, по меньшей мере, одного из поднаборов данных помимо первого поднабора данных получать по меньшей мере одну из моделей, включающих двухмерную послойную модель толщи горных пород, трехмерную послойную модель толщи горных пород и двухмерное изображение ствола скважины.
18. Устройство по п.17, в котором обработка на стадии (б) дополнительно включает осуществляемую по отдельности обработку каждого из множества поднаборов данных, поступающих от группы приемников.
19. Устройство по п.17, в котором свойство представляет собой удельное сопротивление толщи горных пород.
20. Устройство по п.19, в котором каротажным прибором является, по меньшей мере, один из группы, включающей прибор индукционного каротажа с использованием множества групп приемников, прибор многокомпонентного индукционного каротажа и прибор контактного каротажа.
21. Устройство по п.17, в котором процессор способен выбирать каждое из множества поднаборов данных из группы, включающей данные, поступающие от приемника, входящего в группу приемников, и данные, поступающие от группы приемников.
22. Устройство по п.17, в котором обработка на стадии (б) дополнительно предусматривает, по меньшей мере, одну осуществляемую по отдельности обработку из группы, включающей обработку с использованием переходного слоя в модели, обработку с использованием модели без проникновения и обработку с поправкой на влияние прилегающих слоев.
23. Устройство по п.17, в котором обработка на стадии (б) предусматривает дополнительную обработку, включающую радиальную инверсию.
24. Устройство по п.17, в котором, по меньшей мере, один из поднаборов данных имеет разрешающую способность по вертикали, отличающуюся от разрешающей способности по вертикали другого из поднаборов данных.
25. Устройство по п.17, в котором, по меньшей мере, один из поднаборов данных имеет разрешающую способность по горизонтали, отличающуюся от разрешающей способности по горизонтали другого из поднаборов данных.
26. Устройство по п.17, в котором обработка на стадии (б) дополнительно предусматривает осуществляемую по отдельности обработку с использованием, по меньшей мере, одной из инверсий группы, включающей одномерную инверсию и обусловленную инверсию.
27. Устройство по п.17, дополнительно включающее устройство для доставки каротажного прибора в ствол скважины, выбранное из группы, включающей кабель, бурильную трубу и талевый канат.
28. Устройство по п.17, в котором процессор использует первую модель в качестве исходной модели на стадии (б).
29. Устройство по п.28, в котором обработка на стадии (б) дополнительно предусматривает, по меньшей мере, одну из инверсий группы, включающей раздельную инверсию и комплексную инверсию.
30. Машиночитаемый носитель для использования в устройстве для определения свойства толщи горных пород, которое включает:
каротажный прибор, доставляемый в ствол скважины, пробуренной в толще горных пород, для получения множества характеризующих свойство толщи горных пород поднаборов данных от группы приемников, при этом каждый из поднаборов данных имеет соответствующую разрешающую способность, при этом носитель содержит команды, позволяющие процессору
а) осуществлять обработку первого поднабора данных с получением первой модели, и
б) на основании первой модели и путем обработки, по меньшей мере, одного из поднаборов данных помимо первого поднабора данных получать по меньшей мере одну из моделей, включающих двухмерную послойную модель толщи горных пород, трехмерную послойную модель толщи горных пород и двухмерное изображение ствола скважины.
31. Носитель по п.30, представляющий собой, по меньшей мере, один из носителей, включающих постоянное запоминающее устройство (ПЗУ), стираемое программируемое ПЗУ (СППЗУ), электрически программируемое ПЗУ (ЭППЗУ), флэш-память и оптический диск.
| RU 2001121198 А, 10.07.2003 | |||
| Способ исследования пластов-коллекторов | 1987 |
|
SU1539312A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ ВИЗУАЛИЗАЦИИ ДАННЫХ ОБ ОБЪЕКТЕ | 1998 |
|
RU2142162C1 |
| RU 2176405 C2, 27.11.2001 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ, ПРОВЕРКИ И МОДИФИКАЦИИ ГЕОЛОГИЧЕСКИХ МОДЕЛЕЙ ПОДПОВЕРХНОСТНЫХ ЗОН | 1998 |
|
RU2223521C2 |
| US 5854991 А, 29.12.1998 | |||
| US 5867806 A, 02.02.1999 | |||
| US 6502036 B2, 31.12.2002. | |||

