Область техники, к которой относится изобретение
Настоящее изобретение относится к измерению параметров горных пород в условиях буровой скважины. В частности, изобретение относится к устройству и способу определения значений удельного (электрического) сопротивления и углов относительного наклона в анизотропных горных породах.
Уровень техники
Для определения электрических свойств окружающих скважину горных пород обычно используются каротажные приборы, принцип действия которых основан на эффекте электромагнитной индукции и распространении волн в исследуемых породах. Такими каротажными приборами проводят измерения кажущегося удельного сопротивления (или удельной проводимости) породы, по результатам которых - при их надлежащей интерпретации -можно оценивать петрофизические свойства породы и содержащихся в ней флюидов.
Физические принципы каротажа сопротивлений описаны, например, в статье "Introduction to Induction Logging и Application to Logging of Wells Drilled with Oil Based Mud", H.G. Doll, Journal of Petroleum Technology, том 1, с.148, Society of Petroleum Engineers, Richardson Тех. (1949). Co времени опубликования работы H.G. Doll было предложено множество решений по усовершенствованию аппаратуры каротажа сопротивлений. В качестве примеров таких решений можно назвать, например, патенты US 4837517 (Barber), US 5157605 (Chandler и др.) и US 5452761 (BeaRD и др.).
В патенте US 5452761 (BeaRD и др.), содержание которого полностью включено в данное описание в качестве ссылки, описаны устройство и способ цифровой обработки сигналов, принимаемых прибором индукционного каротажа, имеющим излучатель и несколько приемников. На излучатель подается колебательный сигнал, возбуждающий в окружающей породе вихревые токи в частотной области, области переходных процессов или их сочетании. Амплитуды вихревых токов пропорциональны удельной проводимости породы. Эти вихревые токи, в свою очередь, создают на приемниках электрическое напряжение. Снимаемые с приемников значения напряжения оцифровываются с частотой дискретизации, значительно превышающей максимальную представляющую интерес частоту. Во избежание искажений оцифрованного сигнала из-за наложения спектров частоту дискретизации задают в соответствии с критериями Найквиста по меньшей мере вдвое большей максимальной частоты, имеющейся в оцифровываемом сигнале. Строб-импульс оцифровки синхронизируется с циклом колебательного сигнала электрического тока. Этот колебательный сигнал может представлять собой сочетание частот гармонических колебаний в случае исследований в частотной области или источник многократно генерируемого неустановившегося тока в случае исследований переходных процессов. В последнем случае данные измерений преобразуют в частотную область для анализа, обработки и обратного преобразования данных измерений удельного сопротивления с целью установления связанных с удельным сопротивлением свойств породы и структурные характеристики модели удельного сопротивления пласта.
Соответствующие отсчеты, получаемые на каждом цикле, суммируются накоплением по большому числу таких циклов. Результатом этой операции является сигнал, полученный комбинированием и разновременным суммированием. Такие сигналы, сгенерированные для соответствующих приемных (измерительных) катушек, передаются в компьютер для спектрального анализа. Передача на поверхность сигналов, получаемых в результате разновременного суммирования, а не всех отдельных оцифрованных сигналов лишь позволяет сократить объем хранящихся или передаваемых данных. Сигналы, полученные в результате разновременного суммирования, подвергают частотному анализу с получением амплитуд синфазной и квадратурной составляющих напряжений на приемниках на исследуемых частотах. Из полученных амплитуд можно точно вывести удельную проводимость исследуемой породы.
Недостаток скважинных приборов индукционного каротажа сопротивлений, таких как рассмотренный в патенте US 5452761, заключается в том, что входящие в их состав катушки излучателя и приемника обычно намотаны таким образом, что их магнитные моменты практически параллельны только оси прибора. Магнитное поле, создаваемое катушкой излучателя (генераторной катушкой), создает в горных породах вихревые токи, и в известных индукционных приборах эти вихревые токи проходят через породу петлями, которые практически перпендикулярные оси прибора. Затем в приемных катушках наводятся напряжения, соотносящиеся с амплитудой вихревых токов. Однако некоторые пласты сложены электропроводящими пропластками, перемежающимися с тонкими практически непроводящими пропластками. Когда проводящие пропластки залегают по существу параллельно линии движения вихревых токов, сигнал на выходе типового прибора индукционного каротажа сопротивлений в значительной степени зависит от удельной проводимости этих слоев. Таким образом, практически непроводящие слои будут вносить лишь незначительный вклад в общий сигнал на выходе прибора, и поэтому их наличие, как правило, маскируется присутствием проводящих слоев. Однако именно непроводящие слои обычно являются нефтегазоносными и представляющими для оператора прибора наибольший интерес. Поэтому некоторые пласты горных пород, представляющие интерес с точки зрения их освоения, могут остаться незамеченными при интерпретации диаграмм каротажа, полученных известными приборами индукционного каротажа сопротивлений.
В патенте US 6147496 (Strack и др.) предложен способ применения прибора индукционного каротажа, в котором имеется по меньшей мере один излучатель и по меньшей мере один приемник, ориентация которых ограничена взаимно перпендикулярными направлениями. Проводя измерения таким прибором по меньшей мере на двух разных частотах, можно значительно уменьшить влияние на результаты измерений ствола скважины и проникновения в пласт бурового раствора и определять ориентацию прибора относительно плоскостей напластования.
В патенте US 5999883 (Gupta и др.), содержание которого полностью включено в данное описание в качестве ссылки, раскрыт способ определения горизонтальной и вертикальной удельной проводимости анизотропных пластов горных пород. В этом патенте измеряются сигналы электромагнитной индукции, возбуждаемой генераторами, ориентированными по трем взаимно перпендикулярным осям. Одна из взаимно перпендикулярных осей проходит практически параллельно оси каротажного прибора. Сигналы электромагнитной индукции измеряются при помощи первых приемников, магнитный момент каждого из которых параллелен одной из взаимно перпендикулярных осей, и при помощи вторых приемников, магнитный момент каждого из которых перпендикулярен одной из взаимно перпендикулярных осей, которая также перпендикулярна оси прибора. Относительный угол поворота этого магнитного момента, перпендикулярного взаимно перпендикулярным осям, вычисляется на основе сигналов от приемников, в том числе сигналов, измеренных перпендикулярно оси прибора. Вращением амплитуд сигналов от приемников посредством взятого с обратным знаком угла вращения, соответствующего первому преобразованию координат, вычисляется промежуточный тензор результатов измерения. На основе повернутых амплитуд вычисляется угол относительного наклона той из взаимно перпендикулярных осей, которая параллельна оси прибора, по отношению к направлению вертикальной удельной проводимости. Первоначально повернутые амплитуды сигналов вращают посредством взятого с обратным знаком угла наклона, что соответствует преобразованию координат. Оценку анизотропии удельного сопротивления проводят относительно главной оси анизотропии (в более простом случае) и плоскости напластования. Для более типичного случая аналогичную методику можно применить и к ситуации двухосной анизотропии в слоистых структурах, где Rrx отличается от Rhy. При этом горизонтальная удельная проводимость вычисляется на основе амплитуд сигналов от приемника после второго этапа вращения. По амплитудам сигналов от приемника после второго этапа вращения рассчитывается показатель анизотропии. И на основе горизонтальной удельной проводимости и показателя анизотропии вычисляется вертикальная удельная проводимость.
В заявке на патент US 09/676097 (Kriegshauser и др.), содержание которой полностью включено в данное описание в качестве ссылки, рассматривается использование многокомпонентного прибора индукционного каротажа, воспринимающего пять компонент магнитного поля. Этот прибор, который выпущен на рынок компанией "Бейкер Хьюз Инк." под названием 3DEX™, измеряет три главных компоненты магнитного поля Нхх, Нуу, Hzz и диагональные компоненты Нху и Hxz. Данные измерений прибором 3DEX™ получают без фокусировки тока, и поэтому при их интерпретации необходима инверсия.
Прибор 3DEX™ содержит три излучателя и три приемника, ориентированных по взаимно перпендикулярным осям (X, Y, Z), среди которых компонента Z направлена по продольной оси бурильного инструмента. Прибор 3DEX™ позволяет определять удельные сопротивления пород и реализует процесс общей инверсии данных. При наличии достаточного набора начальных условий этот прибор пригоден для определения ориентации. Однако прибор 3DEX™ собирает данные из неизмененной зоны пласта и вводит их в свою модель. Кроме того, прибор 3DEX™ чувствителен к начальным условиям, используемым при инверсии его данных. Поэтому для повышения сходимости, точности и постоянства результатов необходим способ инверсии данных, получаемых прибором 3DEX™, с улучшенными начальными условиями.
В заявке на патент US 10/091310 (Zhang и др.) предлагается способ одновременной инверсии результатов измерений, выполняемых многокомпонентным каротажным прибором, с получением слоистой модели удельных сопротивлений, а также зенитного угла и азимута скважины. Для генерирования модельного сигнала на выходе каротажного прибора используется модель, включающая горизонтальное и вертикальное удельные сопротивления. Используя глобальную целевую функцию, получают итеративное решение, дающее лучшее согласование результатов на выходе модели и полевых измерений. Глобальную целевую функцию определяют как сумму целевой функции данных (разности результатов на выходе модели и результатов измерений) и целевой функции модели, которая повышает устойчивость методики инверсии, накладывая штраф на большие изменения модели при каждой итерации. Измерения могут проводиться прибором электромагнитного каротажа, ось которого расположена наклонно относительно нормали к плоскостям напластования пород. Такой каротажный прибор содержит излучатели и/или приемники с катушками, расположенными под углом к оси прибора. В предпочтительном варианте рассматриваемого решения целевая функция данных определена в системе координат, связанной с катушками. Контроль искривления ствола скважины и установленных на приборе датчиков ориентации дает необходимую информацию для поворота результатов на выходе модели в связанную с катушками систему координат.
В статье "A New Method to Determine Horizontal Resistivity in Anisotropic Formations Without Prior Knowledge of Relative Dip", опубликованной на 37-м ежегодном симпозиуме Общества специалистов по анализу данных промысловой геофизики (SPWLA), Новый Орлеан, 16-19 июня, 1996, Hagiwara описал способ определения горизонтального удельного сопротивления для наклонных скважин или падающих пластов двумя замерами удельного сопротивления обычным методом индукционного каротажа. Однако способ Hagiwara не позволяет определять угол относительного наклона. Для получения угла относительного наклона нужно знать анизотропию горной породы. Кроме того, Hagiwara показывает, что для обычных приборов индукционного каротажа (в которых антенны излучателей и приемников ориентированы по оси прибора) невозможно получить все три параметра (горизонтальное удельное сопротивление, вертикальное удельное сопротивление и угол относительного наклона) совместно. Причины, по которым при использовании обычных приборов индукционного каротажа такое совместное решение невозможно, заключаются в том, что в сигналах, выдаваемых такими приборами, вертикальное удельное сопротивление и угол относительного наклона взаимосвязаны (т.е. не являются независимыми параметрами).
В заявке ЕР 0840142 (Wu) раскрыты способ и устройство для определения горизонтальной удельной проводимости, вертикальной удельной проводимости и угла относительного наклона в процессе бурения. Если угол относительного наклона неизвестен, то согласно известному из ЕР 0840142 способу определяют некую зависимость между диэлектрическими постоянными пласта и его анизотропными удельными проводимостями. Однако в вышеупомянутом обосновании Hagiwara диэлектрические постоянные являются величинами предполагаемыми, и их вклад в сигнал удельного сопротивления, определенный методом фазовых сдвигов, минимален. Поэтому, даже если диэлектрические постоянные будут известны, вертикальное удельное сопротивление и угол относительного наклона останутся связанными между собой и не позволят получить совместное решение.
В патенте US 6136155 (Bittar) описаны устройство и способ определения удельных сопротивлений в скважинных условиях. Изобретение по патенту US 6136155 направлено на создание усовершенствованного скважинного метода и устройства для одновременного определения горизонтального удельного сопротивления, вертикального удельного сопротивления и угла относительного наклона для анизотропных платов горных пород. Зонд, используемый в этом изобретении, устроен таким образом, что излучающая и приемная антенны ориентированы в непараллельных плоскостях, в результате чего вертикальное удельное сопротивление и угол относительного наклона не связаны друг с другом. В предпочтительном варианте или излучатель, или приемник в обычной ориентации установлен в первой плоскости, перпендикулярной оси прибора, и другая антенна установлена во второй плоскости, не параллельной первой. Хотя это изобретение рассчитано главным образом на использование в системах измерения или каротажа в процессе бурения, оно также подходит для канатных работ и возможных других вариантов применения.
Способ по патенту US 6136155 разработан с использованием двумерной конфигурации, не включающей в себя относительное азимутальное положение результатов измерений в скважине, которое необходимо учитывать для однозначного определения ориентации главной оси анизотропии, позволяющего найти Rh, Rv и угол относительного наклона. Для правильного измерения и интерпретации тензора удельного сопротивления и определения его ориентации в анизотропной среде нужна трехмерная измерительная система. В патенте US 6136155 азимутальное положение результатов измерений, необходимое для определения главной оси анизотропии, не учитывается даже в простом случае поперечной анизотропии (TI). Рассмотренный способ измерения горизонтального магнитного диполя и вертикального магнитного диполя также показывает, что его характеристики являются двумерными, а азимутальное положение результатов измерений, необходимое для определения главной оси анизотропии, не учитывается даже в простом случае поперечной анизотропии. В решении по патенту US 6136155 расчетные и измеренные удельные сопротивления, соотнесенные с наведенными напряжениями, не обладают необходимой параметризацией для правильного и точного описания результатов измерений и их положений относительно направления тензора измеренного удельного сопротивления. Настоящее изобретение направлено на преодоление недостатков решения по патенту US 6136155.
Необходим быстродействующий и устойчивый способ для определения стабильного и однозначного решения анизотропии в электропроводящей среде скважин. Для правильного измерения и интерпретации тензора удельного сопротивления в анизотропных материалах необходима трехмерная измерительная система. Эта задача решена настоящим изобретением.
Краткое изложение сущности изобретения
В настоящем изобретении предлагается устройство и способ определения относящегося к удельному (электрическому) сопротивлению свойства пересекаемой скважиной горной породы. Предлагаемый в изобретении способ предусматривает использование нескольких датчиков на каротажном приборе, позволяющих проводить многокомпонентные измерения удельного сопротивления, для получения результатов измерений при множестве угловых положений этого прибора во время его вращения. Результаты измерений представляют соответствующей функцией (например, синусоидой) угловых положений каротажного прибора. На основании этих функций определяют искомое свойство горной породы. Каротажный прибор можно перемещать по скважине на кабеле или бурильной колонне. Угловые положения каротажного прибора могут измеряться при помощи датчика ориентации, в частности, магнитометра, датчика ускорений или гироскопа.
Измерения, проведенные на нескольких глубинах, могут анализироваться совместно. Это в совокупности с разбиением данных на элементы дискретизации (т.н. "бины"), особенно при проведении измерений в процессе бурения, позволяет улучшить отношение "сигнал-шум", тем самым улучшая определение удельного сопротивления.
Краткое описание чертежей
Сущность изобретения поясняется следующими чертежами, на которых одинаковыми ссылочными номерами обозначены соответствующие элементы, и показано:
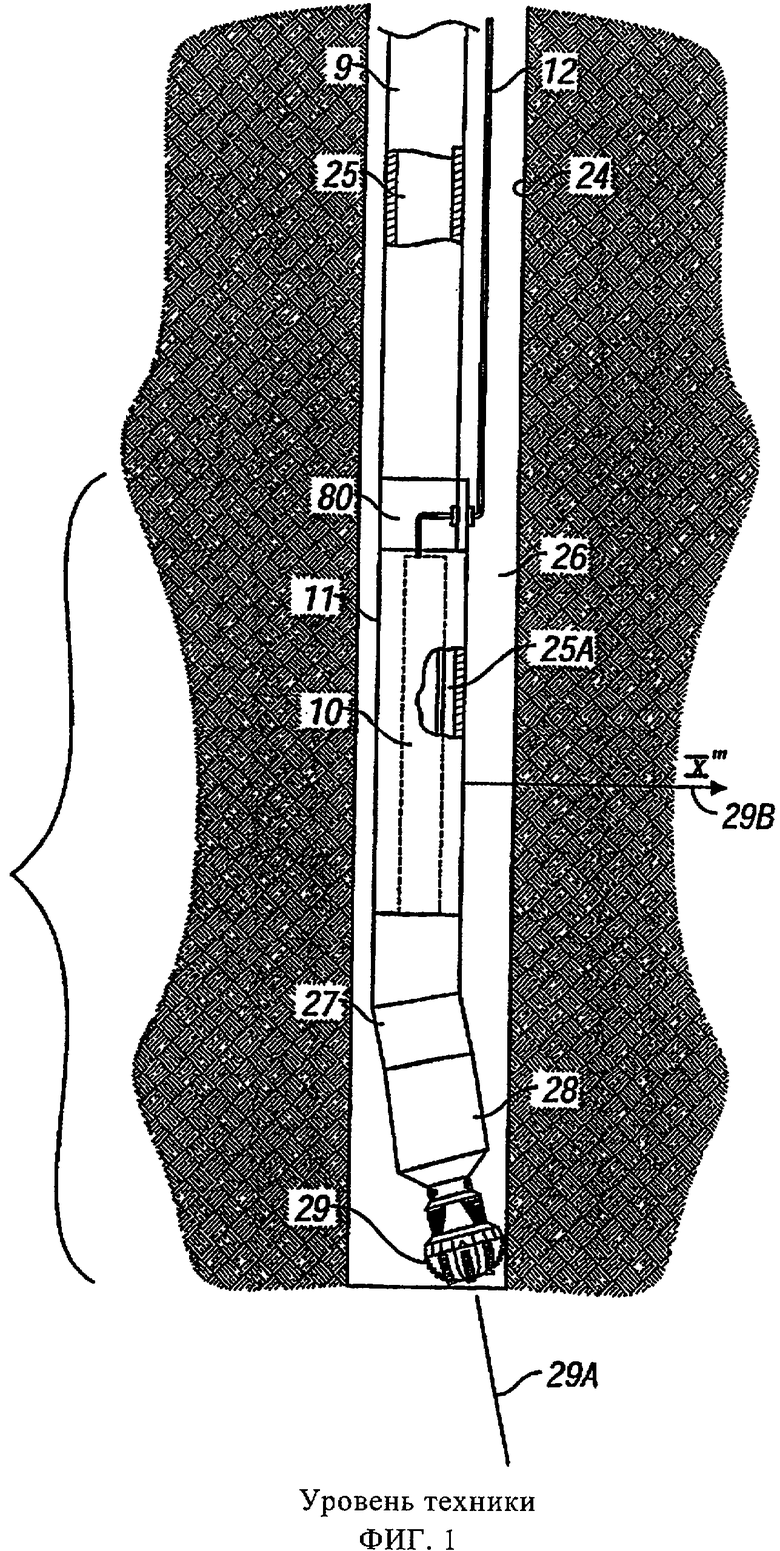
фиг.1 (уровень техники) - типовая забойная компоновка бурильной колонны для бурения скважины и управления ее проводкой, подходящая для применения в настоящем изобретении,
фиг.2 - отклонение расчетной траектории от фактической, обусловленное отклонением в схеме проводки скважин,
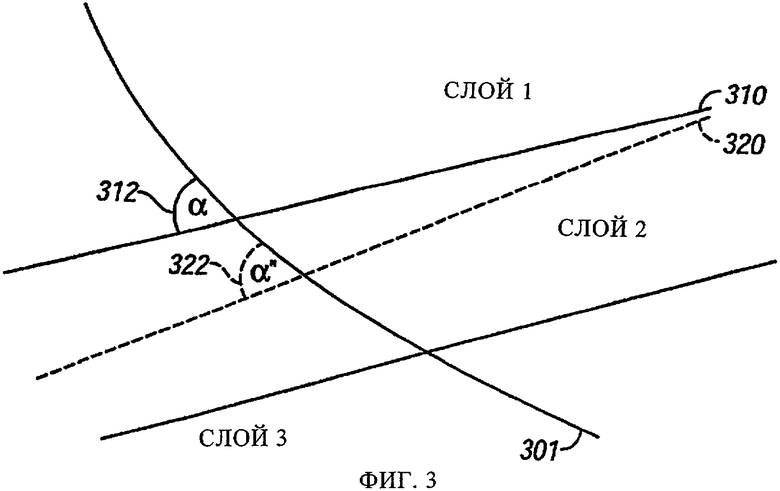
фиг.3 - отклонение фактической геологической модели от прогнозной,
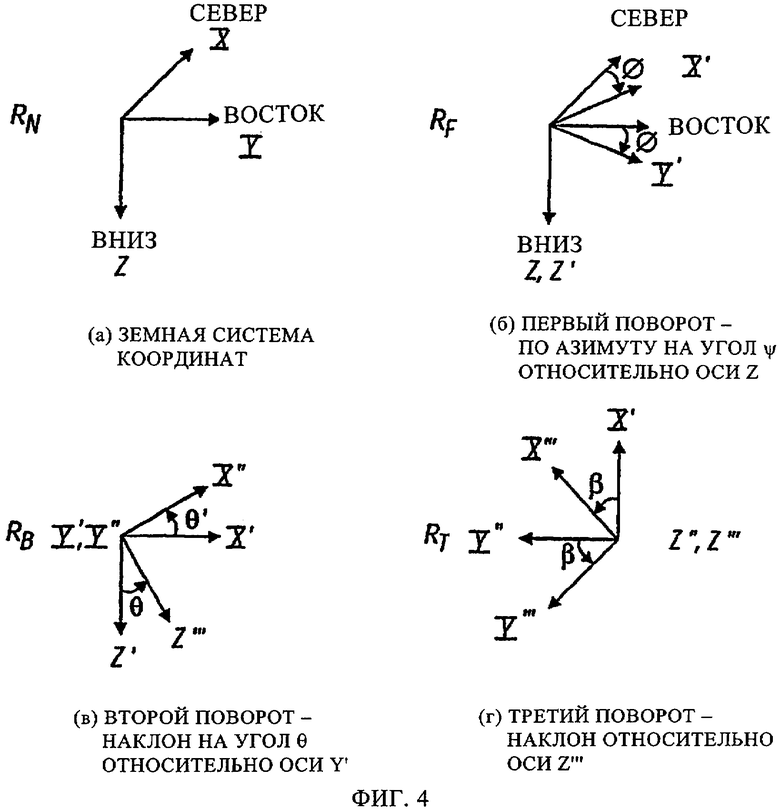
фиг.4 - результаты поворотов используемых в изобретении систем координат,
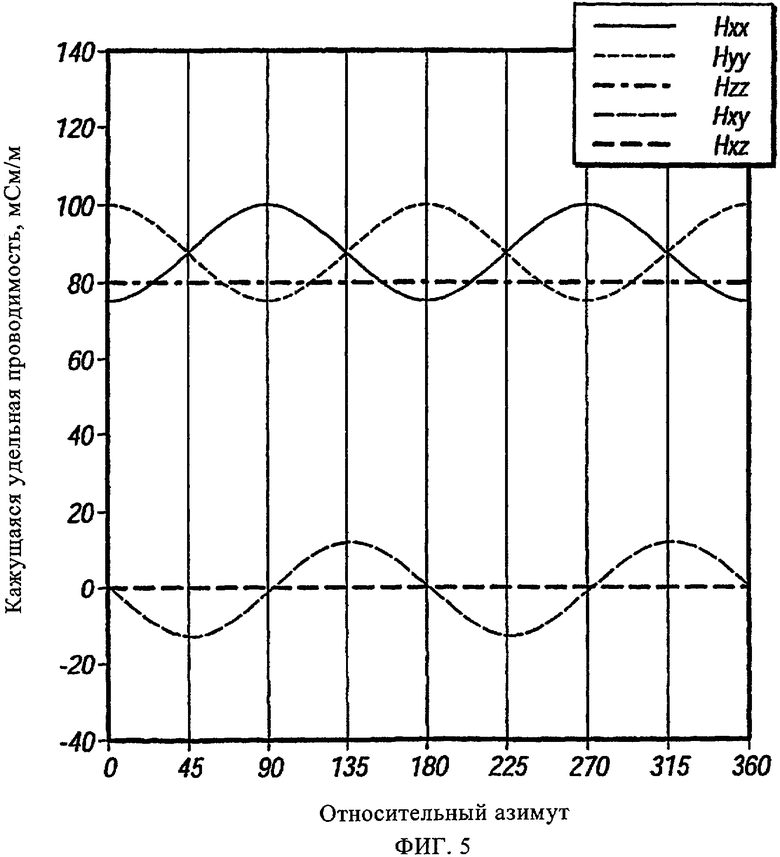
фиг.5 - результаты измерений, проведенных при моделировании на низкой частоте для прибора с тремя координатными осями,
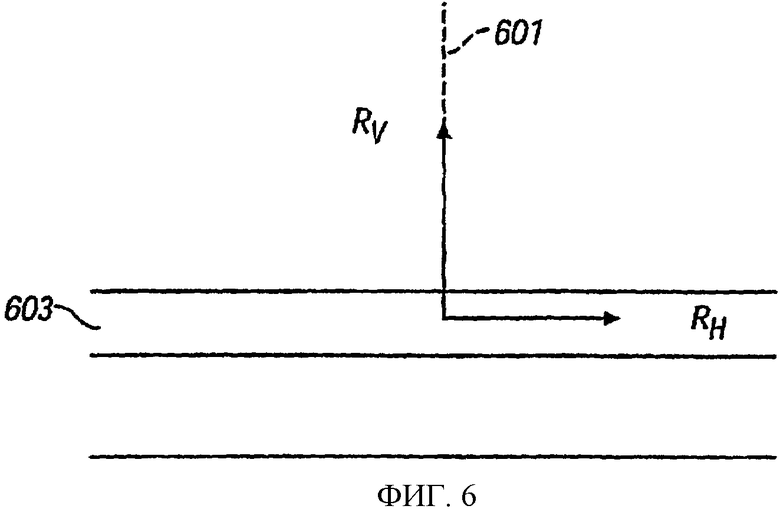
фиг.6 - характерное слоистое строение пласта горных пород;
фиг.7 - перемещаемый по стволу скважины измерительный прибор,
фиг.8А - расположение используемых в изобретении элементов дискретизации результатов измерений по глубине,
фиг.8Б - расположение используемых в изобретении азимутальных элементов дискретизации результатов измерений,
фиг.9 - аппроксимация характеризующих породу данных соответствующей функцией,
фиг.10 - аппроксимация отдельно взятого набора характеризующих породу данных соответствующей функцией,
на фиг.11 - разбиение характеризующих породы данных на элементы дискретизации,
на фиг.12 - измерения степени центрирования с использованием настоящего изобретения.
Предпочтительный вариант осуществления изобретения
На фиг.1 показаны элементы типовой забойной компоновки, подходящей для осуществления изобретения. Как показано на фиг.1, забойная компоновка 40 установлена на секции 9 бурильной колонны, находящейся в скважине 24. В состав забойной компоновки входит утяжеленная бурильная труба 11, отклоняющий переводник 27 и турбинный двигатель 28, приводящий во вращение бурильный инструмент 29 относительно оси 29а. Внутри утяжеленной бурильной трубы находится прибор 10 на гироскопах для измерения искривления скважины, имеющий встроенные инерциальные средства измерения угловых скоростей. Турбинный двигатель приводится в действие потоком бурового раствора, нагнетаемого с поверхности вниз по скважине через внутреннюю полость 25 бурильной колонны 9 и кольцевое пространство 25а между утяжеленной бурильной трубой 11 и прибором 10 для измерения искривления скважины. На пути к турбинному двигателю 28 буровой раствор также проходит через отклоняющий переводник 27.
Поток бурового раствора возвращается на поверхность по кольцевому пространству 26 между наружной поверхностью утяжеленной бурильной трубы или бурильной колонны и стенкой 24 скважины. На фиг.1 показано, что через боковую поверхность утяжеленной бурильной трубы посредством известного бокового ответвителя 80 наружу выведен кабель 12, который внутри утяжеленной бурильной трубы соединен с прибором 10 для измерения искривления скважины. Отсюда кабель идет на поверхность в том же кольцевом пространстве 26, по которому наверх движется поток бурового раствора, отработавшего в турбинном двигателе. Угол перегиба отклоняющего переводника 27 выбирают по требуемой скорости изменения направления бурения по отношению к пройденному расстоянию. Этот угол обычно может составлять от половины градуса до трех градусов. На фиг.1 показан вектор 29Ь опорного направления X″′, который лежит в вертикальной плоскости, проходящей через отклоняющий переводник 27, т.е. через ось 29а. Как известно, при направленном бурении управление направлением искривления скважины обеспечивается поворотом всей бурильной колонны, в том числе забойной компоновки, пока опорный вектор, лежащий в плоскости отклоняющего переводника, не установится в заданном направлении. После того, как этот вектор установится в заданном направлении, буровое долото под действием веса бурильной колонны отклоняется в направлении, соответствующем опорному направлению. Таким образом, процесс ведения долота по заданной траектории можно рассматривать как измерение направления опорного вектора 29, вывод буровому мастеру результатов этого измерения и, при необходимости, коррекцию им ориентации забойной компоновки. Надлежащее согласование азимутальных измерений магнитных моментов, а также других измерений обеспечивается наличием установочных меток или шпонок монтажных соединений. Такое согласование может иметь большое значение, если приемник и источник поля разнесены в разные блоки. К измерениям, которые можно проводить при помощи такого устройства, относятся формирование изображений, визуализирующих свойства околоскважинных пород (ядерным, акустическим методами, методом сопротивлений), измерение параметров движения и определение местоположения (при помощи наклономеров, магнитоизмерительных приборов, гироскопов, датчиков ускорений и т.д.), чувствительные в азимутальном канале исследования пород акустическим методом и методом сопротивлений большой глубинности и т.д.
На фиг.2 показана намеченная 201 и фактическая 211 траектории скважины, проходящие через слой пласта горной породы. При планировании бурения скважин для освоениия пласта-коллектора, исходя из некоторой геологической модели, показанной на фиг.2 как состоящей из слоев 1, 2 и 3, рассчитывается траектория проводки скважины. На основе такой модели путем обработки результатов измерений создается двумерное (азимут в функции глубины) изображение траектории скважины и геологических моделей. Расчетная траектория 201 скважины пересекает границу 200 пласта под углом а (203). Фактическая же траектория 211 скважины может пересечь границу 200 пласта под другим углом α″ (213). Угол α″ отображает падение пласта и отклонение ствола скважины, обусловленное изменением в схеме проводки скважин. В процессе бурения скважины на основании реальных измерений магнитных моментов строится другое двумерное изображение. Это изображение, основанное на натурных измерениях, можно сравнивать с изображением, построенным по данным моделей скважины и пласта. По результатам более глубокого исследования пласта может также создаваться разностное изображение, позволяющее предупреждать задействованный в бурении персонал об отклонении траектории скважины в сторону. Этим изображениям могут присваиваться весовые коэффициенты, отражающие структурные признаки или свойства материала, на основе задачи, решаемой оператором при помощи изображений. Данные исследований ближней области пласта в визуализированном представлении могут привлекаться при подготовке и уточнении рассмотренного выше изображения на основе измерений большей глубинности.
На фиг.2 показано, как угол относительного наклона для пересекаемого траекторией скважины пограничного слоя породы может отклониться от модельного значения при отклонении фактической скважины от запланированной схемы ее проводки и от модели скважины. На фиг.3 показано, как может отклониться угол относительного наклона для пересекаемого траекторией скважины пограничного слоя породы вследствие отклонения геологической модели от прогнозной модели. Линией 301 представлена намеченная траектория скважины. Пограничный слой породы фактической геологической модели обозначен позицией 320, а прогнозной модели - позицией 310. Угол α (312) характеризует расчетный угол относительного наклона траектории 301 скважины, а угол α″ (322) - расчетный угол относительного наклона траектории скважины, учитывающий изменение геологической модели по сравнению с исходной моделью.
На фиг.6 показан анизотропный слой породы. Удельное сопротивление в направлении, параллельном плоскости пласта, известно как горизонтальное удельное сопротивление Rh, а удельное сопротивление в направлении, перпендикулярном плоскости пласта, известно как вертикальное удельное сопротивление Rv, которое в частном случае, показанном на фиг.6, направлено вдоль главной оси симметрии 601 для поперечно-анизотропной среды (TI). В поперечно-изотропных средах значения горизонтального удельного сопротивления в плоскости 603 пласта (напластования) неизменны. Угол относительного наклона скважины представляет собой угол между осью скважины (скважинного прибора) и нормалью к плоскости пласта. Когда ось скважинного прибора расположена с достаточным наклоном относительно нормали к плоскости пласта (т.е. при ненулевом относительном угле наклона), анизотропия горных пород влияет и на производные измерения горизонтального удельного сопротивления.
Для исчерпывающего описания ориентации скважинного прибора необходимо рассмотреть пять систем координат. В наиболее общем случае, когда пласт породы характеризуется некоторым падением, нормаль к плоскости пласта и ось Z в абсолютной (земной) системе координат различны. В первой из рассматриваемых систем координат, известной как земная система координат RN, ось Z направлена вниз в направлении действия силы земного притяжения. Вторая система координат, обозначенная RD, - это система координат, соответствующая плоскости напластования падающего пласта. Нормаль к плоскости, образуемой осями Z систем координат RN и RD, задает общую для этих систем RN и RD ось Y. В обеих системах координат ось Х представляет собой нормаль к соответствующим плоскостям ZY. Если пласт залегает без падения, эти две системы совпадают, а их оси Y и Х могут быть выбраны таким образом, чтобы указывать соответственно на восток и на север. Систему координат RD можно преобразовать в систему координат RN, повернув ось Z системы RD в положение оси Z системы RN вокруг общей оси Y на угол α между двумя осями Z, соответствующий углу падения пласта.
На фиг.4 показано, каким образом базисный вектор X″′, обозначенный на фиг.1 позицией 29b, определен в земной системе координат RN, используемой при проектировании скважины, геонавигации и измерения траектории скважины в пространстве. На фиг.4(а) в изометрии представлена абсолютная (земная) система координат RN, три оси которой направлены на север, на восток и вниз. Обозначение этих направлений как северного и восточного используется лишь для ясности и не ограничивает объема изобретения. Указанные оси системы RN обозначены соответственно символами X, Y и Z.
Третья система координат RF, называемая ниже пластовой, т.е. связанной с подземным пластом, включает в себя плоскость, образованную траекторией скважины и осью Z системы RN. При прямолинейной траектории скважины угол φ - это азимутальный угол плоскости наклона скважинного прибора, измеренный относительно оси Z пластовой системы RN. Ось Z′ системы RF совпадает с осью Z системы RN, что делает ее осью вращения. Ось X′ системы RF получается при повороте оси Х системы RN по горизонтали вокруг оси Z′ на угол φ в плоскость, образуемую траекторией скважины и осью Z. Ось Y′ системы RF перпендикулярна осям X′ и Z′. В анизотропной среде с поперечной анизотропией (TI) плоскость пласта перпендикулярна главной оси анизотропии. В этом случае с анизотропией (TI) горизонтальное удельное сопротивление Rh измеряется в плоскости напластования, а значение Rh остается постоянным в различных направлениях, лежащих в этой плоскости. Вертикальное удельное сопротивление Rv измеряется в направлении, перпендикулярном плоскости напластования.
На фиг.4(б) оси координат, показанные на фиг.4(а), повернуты вокруг оси Z на угол φ. Угол φ по определению представляет собой азимут ствола скважины, и полученные новые оси обозначены X′ и У′. Ось Z при повороте по азимуту своего направления не изменила, но для единообразия условных обозначений названа осью Z′.
Четвертой системой координат RB является местная система координат, связанная с траекторией скважины. Траектория скважины расположена под углом θ (угол относительного наклона) к оси Z′ системы RF. Систему RB получают поворотом оси Z′ системы RF на угол наклона θ к траектории скважины (ось Z″), используя ось Y' в качестве оси вращения. Оси образующейся при этом системы координат RB обозначены соответственно как X″, Y″ и Z″, где оси Y′ и Y″ совпадают.
На фиг.4(в) показан вид в направлении вектора оси Y′ на фиг.4(б). Здесь показан еще один поворот на угол 9 вокруг оси Y′. Угол этого поворота определяется для скважины как угол наклона или зенитный угол, поскольку на этом виде ось Y′ расположена точно горизонтально. Заметим, что ось Z″ по-прежнему проходит по оси скважины.
Пятой системой координат является связанная с прибором система координат RT, получаемая поворотом оси X″ системы RB вокруг ее оси Z″ (т.е. оси прибора и скважины) на угол φ, в результате чего вышеупомянутая ось X″ выравнивается в соответствии с ориентацией катушки излучателя, направленной по оси X″′. Соответствующие координатные оси обозначены как X″′, Y″′ и Z″′ и совпадают с осями измерительных катушек прибора, ориентированных по осям X, Y и Z.
На фиг.4(г) показан вид в направлении оси Z'' или оси скважины, а также действие последнего поворота на угол φ. Вектор X″′ расположен по нормали к азимутальному направлению ствола скважины, и в этом направлении по определению находится плоскость изгиба отклоняющего переводника (позиция 27 на фиг.1). Таким образом, вектор X″′ на фиг.2(г) совпадает с вектором опорного направления X″′, обозначенного на фиг.1 позицией 29b.
В данном описании отображения одним систем координат в другие путем вращения показаны в матричном представлении и рассмотрено ниже. Отображение из системы координат RD, связанной с плоскостью падающего пласта, в земную систему координат RN дается выражением
Матрица вращения Гφ поворачивает векторы на угол φ из земной системы координат RN в систему координат RF, связанную с плоскостью скважины:
Отображение из системы координат RF, связанной с плоскостью скважины, в систему координат RB, связанную с траекторией скважины, имеет вид
Отображение системы координат RF, связанной с траекторией скважины, в местную систему координат RТ, связанную с прибором, дает
Для моделирования каждого из излучателей (также называемых источниками магнитного поля) и приемников, ориентированных по осям X, Y и Z в связанной с прибором системе координат, достаточно решить их в системе координат RF, связанной с плоскостью скважины. Это осуществляется последовательным выполнением рассмотренных выше преобразований:
Символами с двойным штрихом обозначены координаты связанной с прибором системы, рассматриваемые в связанной с прибором системе координат. Каждый член левой матрицы представляет компоненту излучателя, решенную в системе координат
RF, связанной с плоскостью скважины. Так, например, Мх″у представляет компоненту направленного по оси Х излучателя по оси Y системы координат, связанной с плоскостью скважины. Магнитное поле в каждом из приемников в пластовой системе координат получают из:

где Guv - магнитное поле, созданное направленным по оси U единичным излучающим диполем и регистрируемое в приемнике, направленном по оси V, а Hu″v - магнитное поле, созданное направленным по оси U единичным излучающим диполем в связанной с прибором системе координат и действующее на вышеупомянутый приемник, направленный по оси V в пластовой системе координат.
Для получения полей, измеряемых прибором на каждом из его приемников, приведенную выше матрицу компонент магнитного поля необходимо преобразовать обратно в связанную с прибором систему координат. Это достигается следующим преобразованием:
где Hu''v'' - магнитное поле, созданное направленным по оси U излучателем в связанной с прибором системе координат и регистрируемое в направленном по оси V приемнике в связанной с прибором системе координат. При данном конкретном выборе системы координат и ориентации пласта некоторые из компонент тензора принимают нулевые значения. Поля в пластовой системе координат записаны в уравнении (7) для наиболее общего случая анизотропии во всем тензоре. В случае же горной породы с поперечно-анизотропным слоистым строением они (эти поля) сводятся к полям, представленным в предшествующем уравнении (6).
Если прибор имеет только два излучателя единичных магнитных моментов и два соответствующих им приемника, расположенных в направлениях осей Х и Z, мы можем лишь измерить Нх″х″, Hx″z″ (=Hz″x″) и Hz″z″.
Hx''x''=cos2 β[cos2θ·Gxx+sin2θ·Gzx+sin2θ·Gzz]+sin2β·Gyy
Hy''y''=cos2 β[cos2θ·Gxx+sin2θ·Gzx+sin2θ·Gzz]+sin2β·Gyy
Hz''z''=sin2θx·Gzx-sin2θ·Gzx+cos2β·Gzz
Hz''x''=Hx''z''=cosβ[sinθ·cosθ·(Gzz-Gxx)+cos2θ·Gzx]
Hz''y''=Hy''z''=sinβ[sinθ·cosθ·(Gzz-Gxx)+cos2θ·Gzx]
Hx''y''=Hy''x''=sinβ·cosβ·[cos2·Gxx+sin2θ·Gxx+sin2θ·Gzz-Gxx] (8)
Определить необходимо четыре основных неизвестных (β, θ, Rh, Rv). В качестве промежуточного действия сначала определим β, θ, Gxx, Gzx, Gzz, Gyy. Для нахождения всех этих неизвестных информации, полученной в результате измерений, явно недостаточно, если только не получить некоторые параметры по результатам других независимых измерений.
На фиг.5 показаны данные, полученные в результате имитационного моделирования низкочастотных измерений трехэлементным прибором с вертикальным магнитным диполем (ВМД), направленным по оси прибора (ось Z), и двумя ортогональными горизонтальными (или отклоненными) магнитными диполями (ГМДх и ГМДу), расположенными перпендикулярно оси прибора. Представленный на фиг.5 пример соответствует бурению в пласте горизонтальной скважины. Порода пласта имеет следующие значения компонент удельного сопротивления: Rh=7 Ом·м и Rv=14 Ом·м. На фигуре иллюстрируется зависимость результатов измерений, полученных горизонтальными, или отклоненными, катушками, от относительного азимутального положения прибора в отношении тензора удельного сопротивления породы (т.е. Rh и Rv для случая поперечной анизотропии). При исследовании породы низкочастотным методом (на частоте 60 кГц) значения кажущейся проводимости, рассчитанные по результатам измерений принимаемых магнитных полей, изменяются в зависимости от углового положения по азимуту относительно ориентации тензора анизотропии удельного сопротивления. Значения Hzz не зависят от угловой ориентации, а Нхх и Нуу демонстрируют синусоидальное изменение по азимуту. Для диагональной компоненты Нху значения удельной проводимости изменяются по азимуту, хотя и со сдвигом по фазе на 90°. Этот набор кривых позволяет определить ориентацию.
В алгоритме инверсии данных для нахождения угла относительного наклона, вертикального и горизонтального удельного сопротивления используются прямые модели с уравнениями полей и расчетами, которые описываются рассмотренными выше формулами. Можно использовать любую проверенную методику инверсии, например, метод наименьших квадратов или метод Маркара. Пример техники инверсии для измерительного прибора 3DEXSM описан в заявке на патент US 10/091310 (Zhang и др.), права на которую принадлежат обладателю прав на настоящее изобретение и содержание которой включено в данное описание в качестве ссылки. Этот прибор позволяет регистрировать массив данных измерений Hzz, Hzy, Hxz, Нхх, Нху, Нух, Hyz и Нуу одновременно с соответствующим относительным азимутальным положением, измеряемым относительно внешней системы координат (с привязкой к вертикали/вектору силы тяжести, северному магнитному полюсу или обоим). В способе инверсии, раскрытом в заявке US 10/091310, используется модель, включающая в себя значения мощности и удельного сопротивления слоев, а также протяженности и удельного сопротивления зон проникновения фильтрата. В случае измерений в процессе бурения влияние проникновения в пласт бурового раствора предполагается незначительным. Следовательно, использование алгоритма по заявке US 10/091310 в полном объеме, предусматривающем дополнительные измерения параметров зон проникновения фильтрата посредством группы преобразователей, может быть необязательным.
В заявке на патент US 10/167322 (Dubinsky и др.), права на которую принадлежат обладателю прав на настоящее изобретение и содержание которой включено в данное описание в качестве ссылки, описан способ определения скорости проходки скважины буровым снарядом при проведении бурильных работ. Типовым измерительным прибором в составе забойной компоновки является датчик ускорений, по показаниям которого можно судить о параметрах движения бурового снаряда в осевом направлении. Другими средствами измерений могут быть наклономер, магнитометр, гироскоп и т.п. В одном варианте изобретения результаты этих измерений используются определения осевой скорости движения бурового снаряда. При допущении, что бурение ведется отдельными тактами, для этой скорости находят максимумы и минимумы, и по ним определяют скорость проходки скважины. В другом варианте предусмотрена возможность определения максимумов и минимумов осевого перемещения, на основе которых получают зависимость глубины от времени. В еще одном варианте изобретения скорость проходки скважины определяется по среднему ускорению забойной компоновки и ее мгновенной частоте. Полученную скорость проходки скважины можно использовать для управления прибором каротажа в процессе бурения. В частности, управление включением излучателя каротажного прибора осуществляется таким образом, чтобы получать результаты измерений на заданных глубинах. Это особенно целесообразно в приборах с несколькими приемниками, например, используемых при акустическом каротаже с компенсацией влияния скважины. Измерения азимутального направления могут проводиться скважинными измерительными приборами, такими как магнитометр и/или датчики ускорений, гироскоп, наклономер и т.п.
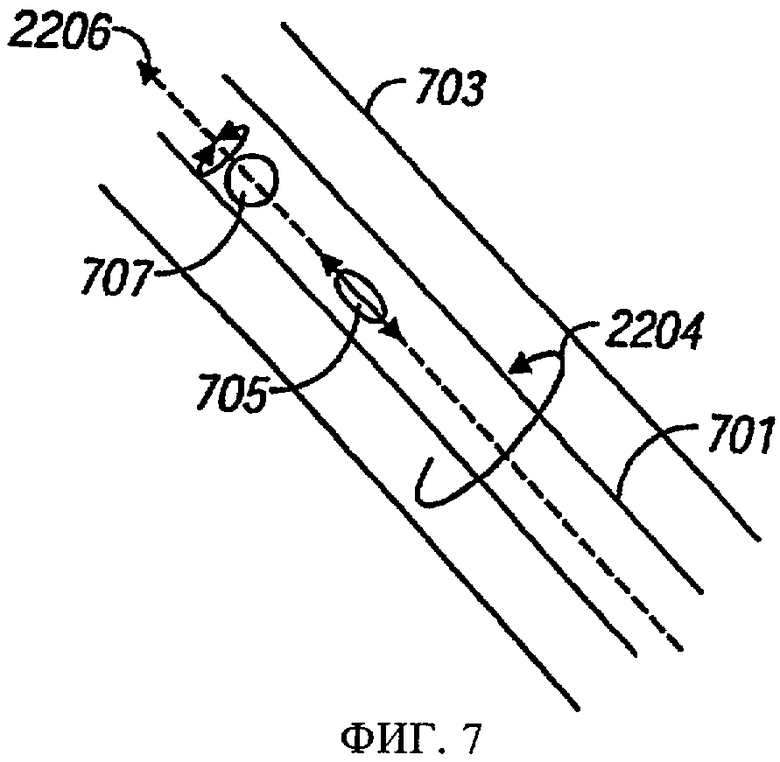
На фиг.7 показана бурильная колонна 701, перемещаемая в скважине 703 по траектории 2206 ее бурения. При перемещении по стволу скважины бурильную колонну доводят по меньшей мере до одной глубины. Бурильная колонна включает в себя средство измерения продольного движения 705 и относительного углового смещения 707 (т.е. датчик ускорений, гироскоп, магнитометр и т.п.). Прибор движется по траектории бурения с вертикальной скоростью Vz(t) и вертикальным ускорением az(t). Прибор также вращается по стрелке 2204 вокруг своей продольной оси с угловой скоростью ω(t) и угловым ускорением aω(t). Эти динамические переменные в совокупности позволяют описать положение прибора в скважине и его перемещения в ней.
При осуществлении предлагаемого в изобретении способа можно использовать данные, получаемые спускаемым на кабеле каротажным прибором, а также устройством для измерений в процессе бурения (ИПБ), перемещаемым на бурильной колонне, например, на колонне бурильных труб или на гибкой непрерывной трубе. В частности, при использовании вместе с ИПБ эти данные об ориентации можно использовать для управления направлением бурения и стабилизации положения скважины относительно залегающих вблизи скважины слоев породы.
Спускаемый в скважину прибор ИПБ выполняет измерения при помощи групп излучателей и приемников, используемых в различных комбинациях и конфигурациях. Эти измерения обладают чувствительностью к изменению свойств породы по азимуту и могут быть симметричными или асимметричными относительно оси прибора. Результаты этих измерений представляют собой данные электромагнитного метода с большим радиусом исследования, чем при использовании построителей изображений скважины в процессе бурения или других приборов для азимутальных измерений в ближней области пласта. Для улучшения отношения "сигнал-шум" и облегчения интерпретации результаты таких азимутальных измерений могут быть организованы в виде массивов данных, разделенных интервалами по глубине скважины (выбираемыми исходя из заданного разрешения по глубине) и ограниченных азимутальными секторами, или интервалами.
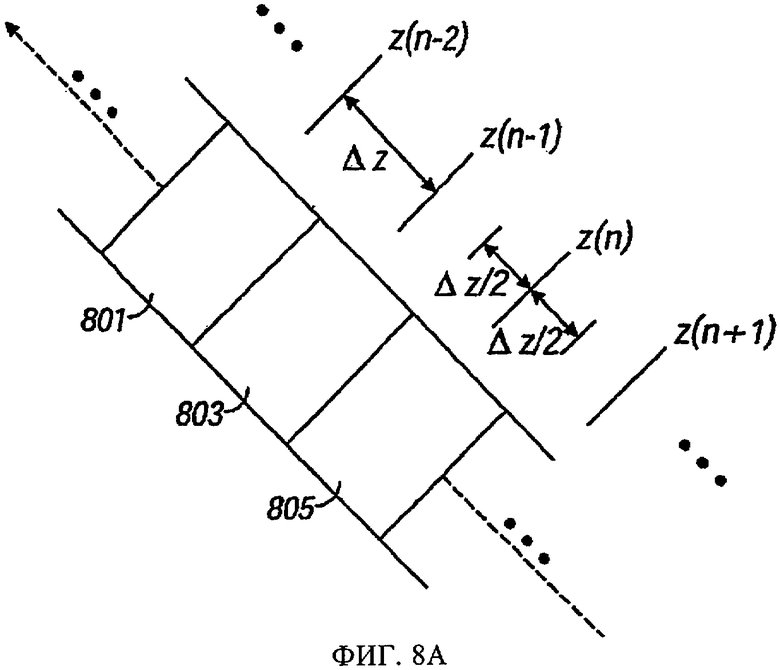
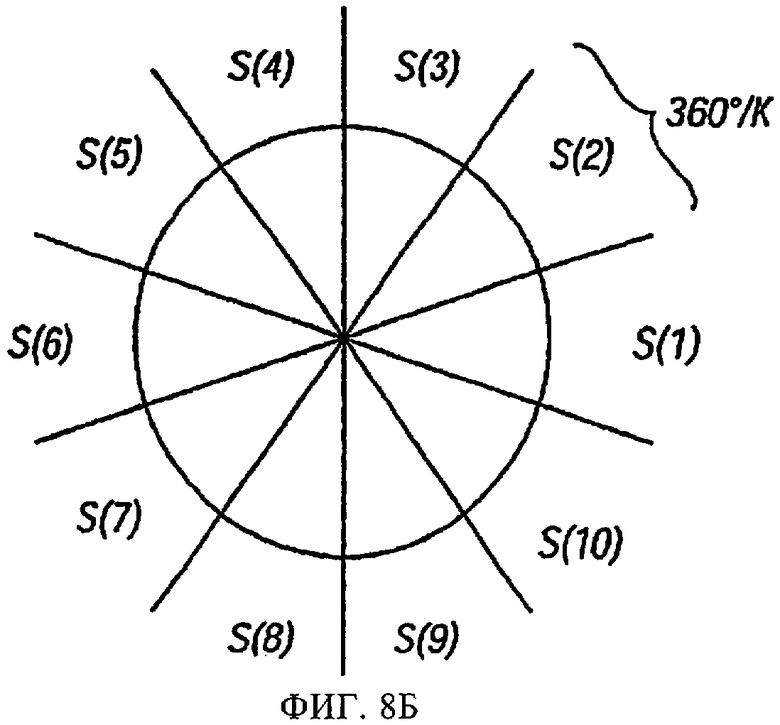
Представленный на фиг.8А вид сбоку прибора ИПБ иллюстрирует предлагаемое в изобретении представление данных в виде элементов дискретизации данных (в литературе также называемые интервалами или бинами) по глубине скважины. Элементы дискретизации данных по глубине скважины обозначены на чертеже как z(n-2), z(n-1), z(n), z(n+1) и т.д. Соседние элементы дискретизации по глубине, такие как элементы 801 и 803 или 803 и 805, расположены на расстоянии Δz друг от друга. Длина типового элемента дискретизации данных по глубине, например, элемента дискретизации 805, равна Δz, т.е. середина каждого такого элемента дискретизации находится на расстоянии Δz/2 от каждой стороны элемента дискретизации. Как возможный вариант, такие массивы данных измерений можно разложить на интервалы по истинной глубине по вертикали, если данные измерений траектории скважины или проектная траектория скважины используются при вычислениях истинной глубины скважины по вертикали. Представленный на фиг.8Б вид прибора ИПБ в сечении иллюстрирует разбиение множества угловых положений в скважине по азимуту на элементы дискретизации, например, на десять азимутальных секторов S(1), S(2)… S(10). Для примера на чертеже обозначен один азимутальный сектор 2202. Число таких секторов может быть предварительно задано оператором для их оптимального использования. Угловая ширина каждого сектора равна 360°/К, где К - число секторов. В примере с десятью секторами, показанном на фиг.8Б, угловая ширина каждого сектора равна 36°.
При использовании прибора данного типа также проводятся вспомогательные измерения, для которых обычно задействуются такие приборы, как наклономеры, гироскопы (волоконно-оптические, механические и т.п.), датчики ускорений (работающие по одной, двум и трем осям) и/или магнитометры, дающие дополнительную информацию, по которой можно определить траекторию скважины, а также положение каротажного прибора относительно пласта во время проведения этих измерений. При наличии этой информации исходные (необработанные) материалы можно разбить на двумерные элементы дискретизации, а также оценить траекторию скважины и положение каротажного прибора относительно пласта. Исходные данные могут быть структурированы разбиением на кластеры, характеризуемые интервалами по глубине (n) и азимутальными секторами (к), с получением массива RD (n, k, ti) исходных данных (RD - сокр. от англ. "raw data"). Обозначение RD (n, k, ti) означает, что массив исходных данных взят на интервале по глубине n, в секторе k в момент времени ti. Для множества значений, измеренных на данной глубине и в азимутальном секторе, можно определить среднее значение для этой глубины и этого азимута. Это значение можно получить из уравнения:
M(n,k)=AVG[F(RD{n,k,ti))],
где M(n,k) - измеренное значение, зарегистрированное на данной глубине и в данном азимутальном секторе.
После внесения поправок по глубине и угловому ускорению в канале относительного азимута усреднение проводится в два этапа для улучшения отношения "сигнал-шум". На первом этапе получают результаты измерений по меньшей мере на одной глубине и в нескольких угловых положениях по относительному азимуту. Результаты, находящиеся в каждом элементе дискретизации 701 по глубине (измеренной глубине или истинной глубине по вертикали) и элементе дискретизации 703 по относительному азимуту, усредняют для улучшения отношения "сигнал-шум". На втором этапе результаты азимутальных измерений, полученных на данной глубине, аппроксимируют соответствующей функцией угловых положений по относительному азимуту.
Интервал выборки временнóго ряда исходных данных, соотнесенных с определенным азимутальным сектором, может не совпадать с временным интервалом циклического включения генератора излучателя, так как синхронизация вращения прибора с циклом работы генератора (генераторной катушки) излучателя скорее всего не предусмотрена. Усреднив структурированные исходные данные по времени, можно уменьшить отношение "сигнал-шум" и улучшить точность за счет уменьшения стандартного отклонения исходных данных, определяемого уравнением:
где σRD(n,k) - стандартное отклонение результатов измерений на интервале по глубине n и в азимутальном секторе k. N - это номер измерения, снятого на данной глубине и в данном азимутальном элементе дискретизации. Временной ряд измеренных исходных данных разбивается на интервалы по глубине и сектора по азимуту и соотносится с неким относительным моментом времени в пределах временного интервала циклического включения генератора излучателя. Как вариант, по меньшей мере на одном этапе измерений часть прибора может быть неподвижной, находясь в предпочтительном азимутальном направлении, пока происходит получение временного ряда исходных данных. Данные M(n,k), разбитые на элементы дискретизации и усредненные для каждого интервала по глубине n и азимутального сектора k, могут образовывать еще один массив, иллюстрируемый следующей таблицей:
При планировании бурения скважины траектория скважины прокладывается вдоль геологической модели пласта-коллектора, описание физических параметров которого включает целевые объекты с заданным удельным сопротивлением, соответствующие задачам, обосновывающим бурение скважины. Целевые объекты с заданным удельным сопротивлением имеют характерный отклик на возбуждающее магнитное поле. Например, на фиг.9 показаны разные азимутальные распределения магнитных полей для некоторых многокомпонентных (Нхх, Нуу, Hxz, Hyz) измерений индукционным методом в слоях, обладающих удельным сопротивлением. Усредненные данные, представленные в приведенной выше таблице, могут использоваться для оценки такого расчетного азимутального распределения магнитных полей на измерительном зонде, исследующем конкретный объект горной породы с известными характеристиками, после чего эта оценка может использоваться для интерпретации параметров геометрии (расстояние - направление - мощность) свойств материала этого целевого объекта. Все примеры кривых, показанные на фиг.9, следуют форме тригонометрической синусоидальной функции. Кривые 905 для компоненты Нхх и 903 для компоненты Нуу имеют по два одинаковых цикла на полный поворот прибора, а кривые 909 для компоненты Hyz и 907 для компоненты Hxz - по одному симметричному циклу на оборот прибора.
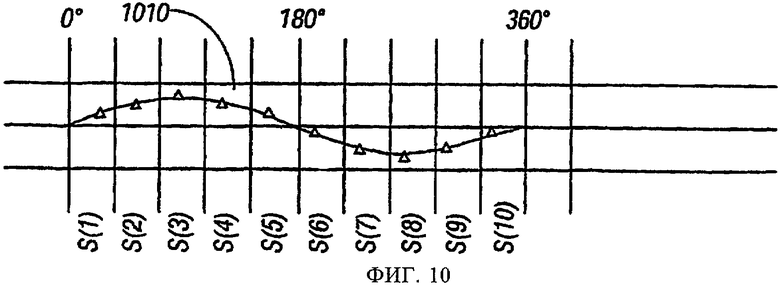
Различные целевые объекты порождают различные функции. Характерным примером соответствующей функции является синусоидальная кривая. Отсутствие должного совпадения расчетных функций для данного измерительного зонда и для заданного целевого объекта пласта может отображаться визуально или в сводном отчете при выявлении таких несовпадений (расчетная функция в сравнении с фактической) или рассогласования между усредненными данными массива M(n,k) и оценкой функции 1010, представляющей расчетные соотношения, связанные с расчетным откликом породы (см. фиг.10). Фактические данные для различных азимутальных секторов и расчетные функции представлены на графиках, показанных на фиг.9, на которой отображены четыре функции (F1-F4). Эти данные могут использоваться для геонавигации (георегулирования), бурения и принятия решений о схеме проводки скважины в процессе бурения.
Такая методика аппроксимации кривой уменьшает неопределенность результатов инверсной обработки данных за счет суммарного эффекта отношения "сигнал-шум" при проведении измерений. Это улучшение обусловлено комбинированием когерентных и соотносящихся друг с другом измерений с оценкой наилучшего приближения для известной синусоидальной функции. Оператор может выбрать подогнанное значение измеренной величины на заданном угле (азимута) и использовать его в программе инверсии. Инверсия проводится по выбранным данным, в том числе внешним исходным данным, связанным с относительным азимутом, и с использованием моделирования, в том числе уравнений, относительных углов и трехмерных параметров, рассмотренных выше.
В частности, инверсия результатов измерений позволяет получить оценочные данные по углу относительного наклона - углу между осью ствола скважины (осью Z каротажного прибора) и плоскостью напластования. Во многих случаях бурение скважины целесообразно вести, оставаясь в пределах конкретной породы-коллектора (например, нефтеносного песчаного пласта, перекрытого глинистой породой). Используя вышеописанный способ, проводку скважины можно скорректировать, если угол относительного наклона станет слишком большим, иначе скважина выйдет за пределы коллектора и войдет в непродуктивную покрывающую породу, например, сланцевую глину. Корректирующие действия для внесения поправок в направление бурения могут предприниматься либо оператором на дневной поверхности или внутрискважинным процессором.
Еще одной прикладной задачей, решаемой с помощью изобретения, является проводка скважины таким образом, чтобы ее ствол находился в предпочтительном положении относительно поверхности раздела жидких сред в коллекторе. Удельное сопротивление пористой породы зависит от присутствующего в ней флюида, причем в водоносных зонах удельное сопротивление меньше, чем в нефте- и газоносных породах.
Альтернативой проведению инверсии может быть моделирование с решением прямой задачи для прогнозирования сигнала на выходе прибора каротажа по методу сопротивления, ожидаемого для намеченной скважины, и на основании результатов натурных измерений и/или усредненных результатов могут предприниматься корректирующие воздействия. Подобный способ, используемый в отношении приборов диэлектрического каротажа по методу сопротивлений, описан в патенте US Re 35386 (Wu и др.), который принадлежит обладателю прав на настоящее изобретение и содержание которого полностью включено в данное описание в качестве ссылки. Важным отличием настоящего изобретения от решения по патенту US Re 35386 является повышенная чувствительность, обеспечиваемая использованием в изобретении датчиков направленного действия: приборов диэлектрического каротажа по патенту US Re 35386, является неориентированной по своей природе.
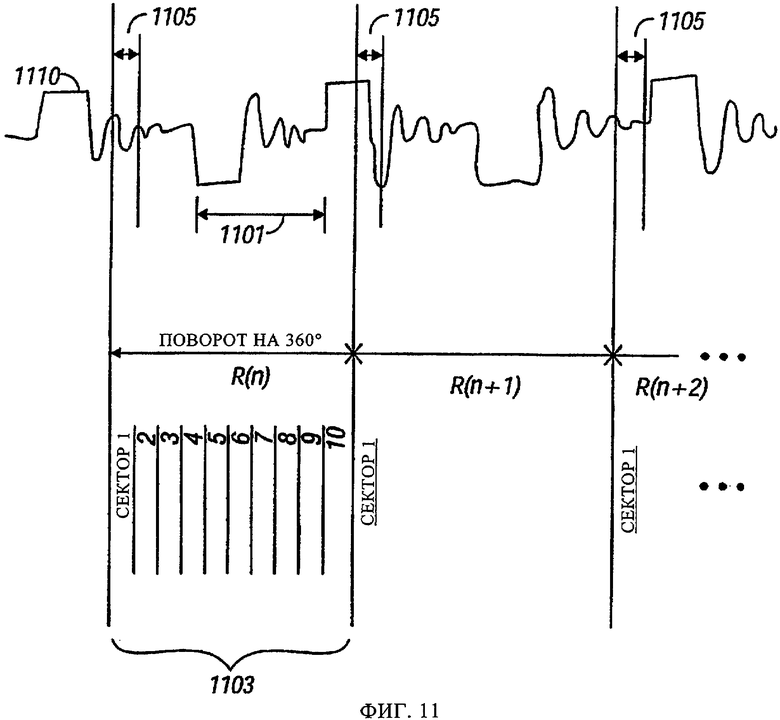
На фиг.11 рассмотрены вопросы синхронизации времени 1101 циклического включения генератора излучателя (Tr), времени 1103 оборота прибора и временного интервала 1105 сканирования одного азимутального сектора в примере с 10 такими секторами. На фигуре обозначен сигнал 1110 излучателя. На фигуре отмечено усреднение данных и организация азимутальных измерений по мере того, как генератор облучает один за другим азимутальные сектора. В другом варианте при проведении измерений каротажный прибор может оставаться неподвижным. Результаты азимутальных измерений можно получать из различных частей колебательного сигнала генератора от одного оборота прибора к следующему. Вращение прибора и включение генератора может быть синхронизировано для облучения определенного азимутального сектора с переходом на другой сектор по мере вращения прибора - и так по всем секторам. Для времени циклического включения генератора излучателя может существовать три случая: i) время циклического включения генератора излучателя может быть меньше временного интервала сканирования одного азимутального сектора; ii) время циклического включения генератора излучателя может быть больше временного интервала сканирования одного азимутального сектора, но меньшим времени оборота прибора; iii) время циклического включения генератора излучателя может быть больше времени оборота прибора. В третьем случае рекомендуется изменить временные интервалы циклических процессов (вращение прибора и включение генератора) таким образом, чтобы удовлетворить первому или втором случаю.
При использовании изобретения для геонавигации полученные данные интерпретируются совместно с диаграммами микрокаротажа сопротивления и диаграммами, полученными построителями изображений скважины с использованием таких методов, как ядерные, методы сопротивлений и акустические методы. Излучатель может находиться на дневной поверхности или в близлежащей скважине. При проведении других вспомогательных и дополнительных электромагнитных измерений, как в случае геонавигации, так и в случае исследования пласта, используются также гибкие схемы (платы).
Вместо проведения измерений вращающимся зондом в практически непрерывном режиме с последующей аппроксимацией кривой, или же в качестве дополнения такого режима, улучшение отношения "сигнал-шум" также может быть достигнуто, если на вход скважинного процессора подавать сигналы от датчиков ориентации, таким образом инициируя сбор данных удельного сопротивления при нахождении каротажного прибора в заданных угловых положениях по азимуту. При малой скорости проходки скважины простое усреднение результатов измерений, полученных от каждого из нескольких датчиков удельного сопротивления многокомпонентного каротажного прибора, может дать достаточно качественную информацию выполнения инверсии.
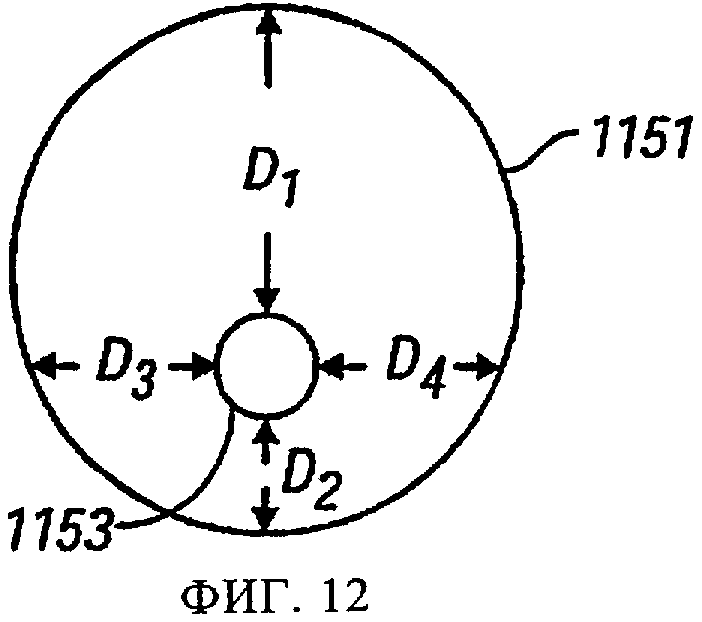
Существует еще один затрагивающий изобретение вопрос, который касается влияния вращения и положения электромагнитной антенны с ориентацией чувствительности в поперечном направлении, как это показано на примере индукционной катушки, ось которой расположена под значительным углом к продольной оси прибора. Wang и др. (SPWLA 2001) привели пример поперечной индукционной катушки, подверженной влиянию скважинного эксцентриситета, перпендикулярного оси симметрии пространственной чувствительности электромагнитной антенны. Эта ситуация отражена на фиг.12, где показан прибор 1153, эксцентрично расположенный в стволе скважины 1151. Аналогичное влияние отмечается в скважинах некруглого сечения, поэтому понятие "эксцентриситет" в дальнейшем используется применительно как к эксцентричному расположению прибора в круглых скважинах, так и к некруглым скважинам.
На чертеже показаны расстояния от прибора до стенки скважины d1, d2, d3 и d4, измеренные в разных направлениях акустическим каверномером или иным методом кавернометрии. Wang показал, что такой эксцентриситет влияет на измерения, проводимые поперечными индукционными катушками. Способов коррекции влияния такого эксцентриситета не существует.
В предпочтительном варианте изобретения для коррекции влияния такого эксцентриситета используется многочастотная фокусировка. В патенте US 5884227 (Rabinovich и др.), принадлежащем обладателю прав на настоящее изобретение, предложен способ коррекции сигналов на приемной индукционной катушке, учитывающей скин-эффект в приборе индукционного каротажа, содержащем несколько разнесенных приемников и излучатель, генерирующий переменные магнитные поля на нескольких частотах. Этот способ включает стадии экстраполирования измеренных амплитуд сигналов, возникающих на нескольких частотах в приемнике как следствие переменных магнитных полей, индуцируемых в среде, окружающей прибор, на сигнал, который был бы получен при нулевой частоте. Обрабатывая экстраполированные амплитуды путем инверсии, генерируют модель распределения удельной проводимости среды вокруг прибора. Решение по патенту US 5884227 работает при допущении, что прибор индукционного каротажа имеет идеальную проводимость. В устройстве для ИПБ это допущение не выполняется. Однако в заявке на патент США на имя Tabarovsky, которая была подана 15.11.2002 (номер дела поверенного 414-29441), права на которую принадлежат обладателю прав на настоящее изобретение и содержание которой полностью включено в данное описание в качестве ссылки, предложен способ коррекции результатов измерений, полученных каротажным прибором для ИПБ с конечной удельной проводимостью на результат, который был бы получен идеальным прибором с бесконечной удельной проводимостью, после чего может использоваться многочастотная фокусировка.
Другой способ решения проблемы эксцентриситета заключается в выполнении инверсии данных с использованием известной геометрии скважины и положения в ней каротажного прибора. В предпочтительном случае при выполнении такой инверсии следует исходить из известного значения удельного сопротивления находящегося в скважине бурового раствора.
Выше были рассмотрены предпочтительные варианты осуществления изобретения, специалисту должны быть очевидны возможности осуществления изобретения и в других, видоизмененных, вариантах. Предполагается, что любые такие изменения при осуществлении изобретения подпадают под патентные притязания, изложенные в прилагаемой формуле изобретения.

Изобретение относится к измерению параметров горных пород в буровой скважине. Сущность: измерения проводят при помощи комбинации ориентируемых трехэлементных зондов (датчиков), перемещаемых в скважине, на нескольких частотах при разных азимутальных углах на данной глубине во время вращения каротажного прибора. Осуществляют экстраполирование результатов измерений на значение, получаемое на нулевой частоте. Разбивают результаты измерений на азимутальные элементы дискретизации. Для каждого датчика представляют результаты измерений соответствующей функцией угловых положений каротажного прибора. На основании соответствующих функций определяют свойство горной породы. Нескольким результатам измерений на данной глубине и азимутальной ориентации могут присваиваться весовые коэффициенты с получением усредненной величины. Технический результат: снижение неопределенности результата, возможность однозначно разрешать ориентацию главной оси анизотропии, а следовательно - горизонтальное и вертикальное удельное сопротивление, а также наклон. 2 н. и 22 з.п. ф-лы, 12 ил.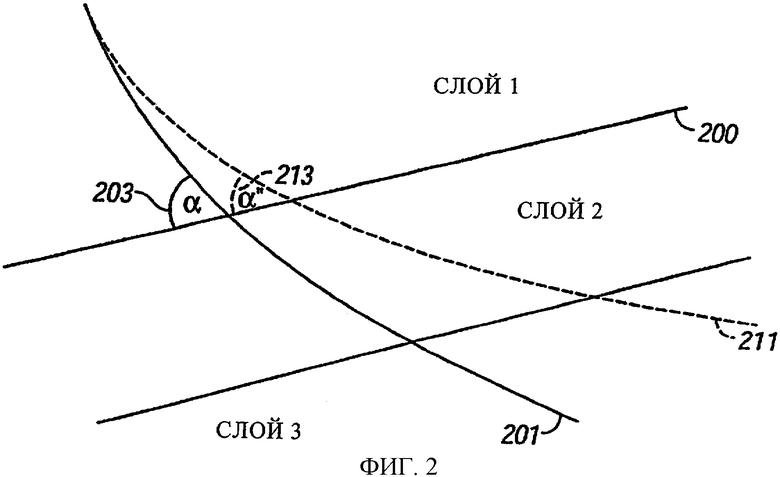
1. Способ определения относящегося к удельному сопротивлению свойства пересекаемой скважиной горной породы, при осуществлении которого:
а) по стволу скважины перемещают каротажный прибор, доводя его по меньшей мере до одной глубины,
б) используют несколько датчиков удельного сопротивления для проведения характеризующих искомое свойство породы измерений на нескольких частотах и при нахождении каротажного прибора в нескольких угловых положениях по азимуту на указанной глубине во время его вращения,
в) обрабатывают результаты измерений и осуществляют их экстраполирование на значение, получаемое при нулевой частоте, и разбивают результаты измерений, полученные от каждого из датчиков удельного сопротивления, на азимутальные элементы дискретизации,
г) для каждого из нескольких датчиков представляют результаты измерений, экстраполированные и разбитые на азимутальные элементы дискретизации, соответствующей функцией угловых положений каротажного прибора, и
д) на основании соответствующих нескольких функций определяют искомое свойство горной породы.
2. Способ по п.1, в котором каротажный прибор перемещают на кабеле или бурильной трубе.
3. Способ по п.1, в котором измерения проводят на нескольких глубинах, и полученные от каждого датчика результаты измерений, разбитые на азимутальные элементы дискретизации, усредняют по указанным глубинам.
4. Способ по п.1, в котором в качестве датчиков удельного сопротивления используют несколько пар "излучатель-приемник", оси которых расположены под углом к продольной оси скважины.
5. Способ по п.1, в котором угловые положения каротажного прибора измеряют при помощи датчика ориентации, в частности датчика ускорений, магнитометра или гироскопа.
6. Способ по п.1, в котором каждая из соответствующих функций является по существу синусоидой.
7. Способ по п.1, в котором при определении искомого свойства породы выполняют инверсию значений соответствующих функций при выбранном угловом положении каротажного прибора.
8. Способ по п.3, в котором определение глубин, проходимых каротажным прибором, выполняют датчиком ускорений.
9. Способ по п.4, в котором в число излучателей и приемников входят излучатели и приемники, ориентированные по координатным осям X, Y и Z.
10. Способ по п.1, в котором относящимся к удельному сопротивлению свойством горной породы является по меньшей мере один из следующих ее параметров: горизонтальное удельное сопротивление, вертикальное удельное сопротивление, протяженность зоны проникновения фильтрата бурового раствора в породу и удельное сопротивление зоны проникновения фильтрата бурового раствора в породу.
11. Способ по п.7, в котором при выполнении инверсии
а) задают начальную модель из нескольких слоев горных пород, включающую горизонтальное и вертикальное удельное сопротивление для каждого слоя,
б) определяют расчетные показания каротажного прибора в указанной модели,
в) задают целевую функцию данных, соотнесенную с разностью расчетных показаний каротажного прибора и полученных им результатов измерений, полученных с использованием прибора многокомпонентного каротажа,
г) итерационно уточняют указанную модель, уменьшая глобальную целевую функцию, представляющую собой сумму целевой функции данных и целевой функции модели, соотнесенной с изменениями модели при каждой итерации.
12. Способ по п.11, в котором в горной породе имеется зона проникновения фильтрата бурового раствора, причем каротажным прибором с несколькими приемниками проводят измерения по методу сопротивлений, характеризующие свойства зоны проникновения фильтрата бурового раствора, а начальная модель включает протяженность и удельное сопротивление зоны проникновения фильтрата бурового раствора.
13. Способ по п.1, в котором скважина является практически горизонтальной.
14. Способ по п.1, в котором результаты многочастотных измерений корректируют с учетом конечной удельной проводимости корпуса каротажного прибора.
15. Способ по п.1, в котором выполняют несколько измерений каверномером и определяют искомое свойство горной породы с использованием результатов этих измерений.
16. Способ по п.1, в котором каротажный прибор перемещают на бурильной колонне, причем на основании измеряемого свойства горной породы регулируют направление бурения скважины.
17. Устройство для определения по меньшей мере на одной глубине относящегося к удельному сопротивлению свойства пересекаемой скважиной горной породы, содержащее
а) каротажный прибор с несколькими датчиками удельного сопротивления, каждый из которых выполнен с возможностью проведения характеризующих искомое свойство породы измерений на нескольких частотах и при нахождении каротажного прибора в нескольких угловых положениях по азимуту во время его вращения,
б) по меньшей мере один датчик ориентации для проведения измерений, характеризующих угловые положения каротажного прибора по азимуту, и
в) процессор, способный осуществлять
обработку результатов измерений и их экстраполирование на значение, получаемое при нулевой частоте, и разбиение результатов измерений, получаемых от каждого из датчиков удельного сопротивления, на азимутальные элементы дискретизации, а также
применение аппроксимирующей функции к каждому экстраполированному и разбитому на азимутальные элементы дискретизации результату измерения, полученному от каждого из датчиков удельного сопротивления, и
определение искомого свойства горной породы на основании аппроксимирующих функций, соответствующих каждому из датчиков удельного сопротивления.
18. Устройство по п.17, в котором измерения проводятся на нескольких глубинах, а процессор обеспечивает комбинирование результатов измерений на указанных глубинах для определения искомого свойства горной породы.
19. Устройство по п.17, в котором относящимся к удельному сопротивлению свойством горной породы является по меньшей мере один из следующих параметров: горизонтальное удельное сопротивление, вертикальное удельное сопротивление, протяженность зоны проникновения фильтрата бурового раствора в породу и удельное сопротивление зоны проникновения фильтрата бурового раствора в породу.
20. Устройство по п.17, в котором датчиками удельного сопротивления являются несколько пар "излучатель-приемник", оси которых расположены под углом к продольной оси скважины.
21. Устройство по п.17, в котором по меньшей мере одним датчиком ориентации является датчик ускорений, магнитометр или гироскоп.
22. Устройство по п.21, в котором процессор позволяет определять положение каротажного прибора в скважине по глубине по данным от датчика ускорений.
23. Устройство по п.17, в котором аппроксимирующая функция представляет собой синусоиду.
24. Устройство по п.20, в котором в число излучателей и приемников входят излучатели и приемники, ориентированные по координатным осям X, Y и Z.
| US 6181138 B1, 30.01.2001 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ АНТИСТОКСОВОГО ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ ДЛЯ УСТРОЙСТВ ВИЗУАЛИЗАЦИИ ИНФРАКРАСНОГО ИЗОБРАЖЕНИЯ | 2008 |
|
RU2369890C1 |
| US 6476609 B1, 05.11.2002 | |||
| Устройство для индукционного каротажа | 1971 |
|
SU900823A3 |
| Преобразователь позиционного кода в код с большим основанием | 1987 |
|
SU1444959A1 |

