ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к шкале абсолютных значений индуктосинного типа и способу расчета абсолютных значений.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Шкала индуктосинного типа, применяемая в механических станках и тому подобном, включает в себя поворотный тип (поворотную шкалу) и линейный тип (линейную шкалу).
Поворотная шкала предназначена для определения угла поворота и сконфигурирована из ротора на поворотной стороне, содержащей профиль 1 обмотки стороны ротора, сложенный зигзагообразно и сформированный, в целом, в кольцевую форму, как показано на фиг.27A; и статора на неподвижной стороне, содержащей профиль 2 обмотки стороны статора, сложенный зигзагообразно и сформированный, в целом, в кольцевую форму, как показано на фиг.27B. Ротор и статор расположены так, что обращены друг к другу, так что профиль 1 обмотки стороны ротора и профиль 2 обмотки стороны статора обращены друг к другу.
В этой поворотной шкале, когда переменный ток подается на профиль 2 обмотки стороны статора, на профиле 1 обмотки стороны ротора формируется наведенное напряжение. Как показано на фиг.28, наведенное напряжение изменяется периодически (где период равен одному шагу между проводниками профиля 2 обмотки стороны ротора) в зависимости от угла поворота ротора (профиля 1 обмотки стороны ротора) (то есть, с изменением уровня индуктивной связи, соответствующим изменению позиционной корреляции между профилем 2 обмотки стороны статора и профилем 1 обмотки стороны ротора). Это наведенное напряжение передается с поворотной стороны на неподвижную сторону через трансформаторы, включенные, соответственно, на поворотной стороне и неподвижной стороне. Соответственно, угол поворота ротора (поворотного вала, присоединенного к ротору в механическом станке или тому подобному) может определяться посредством использования величины изменения наведенного напряжения.
Хотя в материалах настоящей заявки иллюстрация опущена, линейная шкала предназначена для определения величины линейного перемещения и сконфигурирована из ползуна на скользящей стороне, содержащей профиль обмотки стороны ползуна, сложенный зигзагообразно и сформированный, в целом, в линейную форму; и шкалы на неподвижной стороне, содержащей профиль обмотки стороны шкалы, сложенный зигзагообразно и сформированный, в целом, в линейную форму. Здесь ползун и шкала расположены так, что обращены друг к другу, так что профиль обмотки стороны ползуна и профиль обмотки стороны шкалы обращены друг к другу.
В этой линейной шкале, когда переменный ток подается на профиль обмотки стороны ползуна, наведенное напряжение, которое периодически изменяется, формируется на профиле обмотки стороны шкалы. Наведенное напряжение изменяется периодически (где период равен одному шагу между проводниками профиля обмотки стороны шкалы) в зависимости от величины линейного перемещения ползуна (профиля обмотки стороны ползуна) (то есть, с изменением уровня индуктивной связи, соответствующим изменению позиционной корреляции между профилем обмотки стороны ползуна и профилем обмотки стороны шкалы). Соответственно, возможно детектировать величину линейного перемещения (расстояние линейного перемещения) ползуна (такого как поступательное движение вала механического станка и т.п., присоединенного к ползуну) посредством использования величины изменения в этом наведенном напряжении.
Более того, поворотная шкала абсолютных значений, обеспечивающая определение абсолютного значения угла поворота (абсолютного угла), и линейная шкала абсолютных значений, обеспечивающая определение абсолютного значения величины линейного перемещения (абсолютной величины перемещения), также разработаны сегодня в качестве шкал абсолютных значений, полученных применением поворотной шкалы индуктосинного типа и линейной шкалы индуктосинного типа, как описано выше.
Поворотная шкала абсолютных значений содержит ротор на поворотной стороне, содержащей два профиля 5 и 6 обмотки стороны ротора с разными шагами между проводниками, которые сложены зигзагообразно и сформированы, в целом, кольцевой формы (фиг.29A); и статор на неподвижной стороне, содержащей два профиля 7 и 8 обмотки стороны статора с разными шагами между проводниками, которые сложены зигзагообразно и сформированы, в целом, кольцевой формы (фиг.29B). Ротор и статор расположены так, что обращены друг к другу, так что профили 5 и 6 обмотки стороны ротора обращены к профилям 7 и 8 обмотки стороны статора соответственно. Кроме того, профили 5 и 6 обмотки стороны ротора имеют разные шаги Pm град. и Ps град. между проводниками (где Ps<Pm), соответственно, и сформированы в одной и той же плоскости. Профили 7 и 8 обмотки стороны статора также имеют разные шаги, соответственно, Pm' град. и Ps' град. между проводниками (где Ps'<Pm'), соответствующими шагам Pm и Ps между проводниками профилей 5 и 6 обмотки стороны ротора, и сформированы в одной и той же плоскости.
Конфигурация статора далее будет описана более подробно со ссылкой на фиг.30A и 30B. Профили 7 и 8 (фиг.30A и 30B) обмотки стороны статора сформированы на статоре 9 путем прикрепления медной фольги к поверхности базовой детали 10 с изоляционным элементом 11, вставленным между ними, а затем обработкой медной фольги посредством использования литографии или тому подобного для выполнения определенных профилей обмотки. Более того, паз 14 прокладки проводов сформирован на базовой детали 10, так что профили 7 и 8 обмотки стороны статора электрически присоединены к внешнему проводу 15 через внутренний провод 13, который предусмотрен в пазу 14 прокладки проводов. Вторичная обмотка 12 трансформатора 16 также предусмотрена в пазу 14 прокладки проводов, сформированном на базовой детали 10. Ротор имеет конфигурацию (не показана), подобную статору, и образован формированием профилей 5 и 6 обмотки стороны ротора посредством использования медной фольги, прикрепленной к базовой детали, с изоляционным элементом, вставленным между ними. Внутренний провод и первичная обмотка трансформатора 16 размещены в пазу для прокладки проводов, который сформирован на базовой детали.
В этой поворотной шкале абсолютных значений, когда переменный ток подается на профили 7 и 8 обмотки стороны статора, наведенные напряжения формируются на профилях 5 и 6 обмотки стороны ротора. Наведенные напряжения изменяются периодически (где период = каждому из одного шага Ps между проводниками и одного шага Pm между проводниками профилей 5 и 6 обмотки стороны ротора) в зависимости от углов поворота ротора (профилей 5 и 6 обмотки стороны ротора). Наведенные напряжения передаются, соответственно, с поворотной стороны на неподвижную сторону через трансформаторы 16, включенные в поворотную сторону и неподвижную сторону. Соответственно, возможно детектировать абсолютный угол ротора (такого как поворотный вал механического станка или тому подобного, присоединенного к ротору) посредством использования разности в угле между величинами изменения в этих наведенных напряжениях.
Линейная шкала абсолютных значений содержит: ползун на скользящей стороне, содержащей два профиля 21 и 22 обмотки стороны ползуна с разными шагами между проводниками, которые сложены зигзагообразно и сформированы, в целом, линейной формы (фиг.31A); и шкалу на неподвижной стороне, содержащей два профиля 23 и 24 обмотки стороны шкалы с разными шагами между проводниками, которые сложены зигзагообразно и сформированы, в целом, линейной формы (фиг.31B). Ползун и шкала расположены так, что обращены друг к другу, так что профили 21 и 22 обмотки стороны ползуна обращены к профилям 23 и 24 обмотки стороны шкалы соответственно. Более того, профили 23 и 24 обмотки стороны шкалы имеют, соответственно, разные шаги Pm [мм] и Ps [мм] между проводниками (где Ps<Pm), а профили 21 и 22 обмотки стороны ползуна также имеют, соответственно, разные шаги Pm' град. и Ps' град. (где Ps'<Pm'), соответствующие шагам между проводниками Pm и Ps профилей 23 и 24 обмотки стороны шкалы, которые сформированы в одной и той же плоскости.
Конфигурация ползуна далее будет описана более подробно со ссылкой на фиг.32A и 32B. Профили 21 и 22 (фиг.32A и 32B) обмотки стороны ползуна сформированы на ползуне 25 путем прикрепления медной фольги к поверхности базовой детали 26 с изоляционным элементом 27, вставленным между ними, а затем обработкой медной фольги для формирования определенных профилей обмотки посредством использования литографии или тому подобного. Более того, паз 28 прокладки проводов сформирован на базовой детали 26, так что профили 21 и 22 обмотки стороны ползуна могут электрически присоединяться к внешнему проводу 30 через внутренний провод 29, который предусмотрен в этом пазу 28 прокладки проводов. Шкала (не показана) сконфигурирована подобной ползуну формированием профилей 23 и 24 обмотки стороны шкалы посредством использования медной фольги, прикрепленной к базовой детали, с изоляционным элементом, вставленным между ними. Профили 23 и 24 обмотки стороны шкалы электрически присоединены к внешнему проводу через внутренний провод, который предусмотрен в пазу для прокладки проводов, сформированном на базовой детали.
В этой линейной шкале абсолютных значений, когда переменный ток подается на профили 21 и 22 обмотки стороны ползуна, наведенные напряжения формируются на профилях 23 и 24 обмотки стороны шкалы. Наведенные напряжения изменяются периодически (где период = каждому из одного шага Ps между проводниками и одного шага Pm между проводниками профилей 23 и 24 обмотки стороны шкалы) в зависимости от величин линейного перемещения шкалы (профилей 23 и 24 обмотки стороны шкалы). Соответственно, абсолютная величина перемещения ползуна (такого как поступательное движение вала механического станка или тому подобного, прикрепленного к ползуну) может определяться путем использования разности в величине перемещения между величинами изменения в наведенных напряжениях.
Выложенная публикация №Hei 11-083545 заявки на выдачу патента Японии (Патентный документ 1).
В случае традиционной поворотной шкалы абсолютных значений, описанной выше, профили 5 и 6 обмотки стороны ротора сформированы в одной и той же плоскости, при этом профили 7 и 8 обмотки стороны статора также сформированы в одной и той же плоскости. Соответственно, для того чтобы избежать увеличения размера взятой в целом шкалы абсолютных значений, следует обязательно уменьшать пространство, занимаемое каждым из профилей 5, 6, 7 и 8 обмоток (длины в радиальном направлении каждого из профилей 5, 6, 7 и 8 обмоток). Как следствие, точность детектирования более вероятно будет подвергаться влиянию технологического отклонения среди шкал абсолютных значений и, таким образом, трудно получить стабильную точность детектирования.
Аналогично, в случае традиционной линейной шкалы абсолютных значений, описанной выше, профили 21 и 22 обмотки стороны ползуна сформированы в одной и той же плоскости, при этом профили 23 и 24 обмотки стороны шкалы также сформированы в одной и той же плоскости. Соответственно, чтобы избежать увеличения в размере взятой в целом шкалы абсолютных значений, следует обязательно уменьшать пространство, занимаемое каждым из профилей 21, 22, 23 и 24 обмоток (длины в направлении ширины каждого из профилей 21, 22, 23 и 24 обмоток). Как следствие, точность детектирования будет подвергаться влиянию технологического отклонения среди шкал абсолютных значений и, таким образом, трудно получить стабильную точность детектирования.
Более того, также существует необходимость в способе расчета, обеспечивающем легкий и достоверный расчет абсолютного угла или абсолютной величины перемещения с помощью шкалы абсолютных значений.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на устранение вышеизложенных проблем.
Задачей настоящего изобретения является создание поворотной и линейной шкал абсолютных значений, обеспечивающих уменьшение пространства, занимаемого каждым профилем обмотки, (длин в радиальном направлении и направлении ширины каждого профиля обмотки) без увеличения размера взятых в целом шкал абсолютных значений, а также обеспечивающих легкий и достоверный расчет абсолютного угла и абсолютной величины перемещения с помощью шкал абсолютных значений.
Шкала абсолютных значений согласно первому аспекту настоящего изобретения содержит ползун, имеющий многочисленные профили обмотки стороны ползуна, каждый из которых имеет разный шаг между проводниками, и шкалу, имеющую многочисленные профили обмотки стороны шкалы, каждый из которых имеет разный шаг между проводниками, при этом ползун и шкала расположены так, что обращены друг к другу, при этом профили обмотки стороны ползуна и профили обмотки стороны шкалы также обращены один к другому, причем профили обмотки стороны ползуна являются ламинированными, и профили обмотки стороны шкалы являются ламинированными.
В данном случае шкала абсолютных значений является любой из поворотной шкалы абсолютных значений и линейной шкалы абсолютных значений. Профили обмотки стороны ползуна соответствуют любым из профилей обмотки стороны статора поворотной шкалы абсолютных значений и профилей обмотки стороны ползуна линейной шкалы абсолютных значений. Ползун соответствует любому из статора поворотной шкалы абсолютных значений и ползуна линейной шкалы абсолютных значений. Профили обмотки стороны шкалы соответствуют любым из профилей обмотки стороны ротора поворотной шкалы абсолютных значений и профилей обмотки стороны шкалы линейной шкалы абсолютных значений. Шкала соответствует любому из ротора поворотной шкалы абсолютных значений и шкалы линейной шкалы абсолютных значений.
При этом шкала абсолютных значений согласно второму аспекту настоящего изобретения содержит шкалу абсолютных значений по первому аспекту, которая содержит средство питания для подачи переменных токов на каждый из профилей обмотки стороны ползуна для ползуна с разными временными привязками.
Кроме того, шкала абсолютных значений согласно третьему аспекту настоящего изобретения содержит шкалу абсолютных значений по первому аспекту, которая содержит средство питания для подачи переменных токов, имеющих разные частоты, на каждый из профилей обмотки стороны ползуна для ползуна, и фильтры, предусмотренные на каждом из выходных концов профилей обмотки стороны шкалы для шкалы, и сконфигурированные для среза напряжения, имеющего частоту, отличную от частоты исходного наведенного напряжения в каждом из профилей обмотки стороны шкалы.
При этом шкала абсолютных значений согласно четвертому аспекту настоящего изобретения содержит шкалу абсолютных значений согласно третьему аспекту, в которой средство питания обеспечивает подачу переменных токов в каждый из профилей обмотки стороны ползуна для ползуна с разными временными привязками.
Кроме того, шкала абсолютных значений согласно пятому аспекту настоящего изобретения содержит шкалу абсолютных значений по любому из с первого по четвертый аспектов. И в случае, когда абсолютная шкала является поворотной абсолютной шкалой, профили обмотки стороны ползуна соответствуют профилям обмотки стороны статора поворотной шкалы абсолютных значений; ползун соответствует статору поворотной шкалы абсолютных значений; профили обмотки стороны шкалы соответствуют профилям обмотки стороны ротора поворотной шкалы абсолютных значений; а шкала соответствует ротору поворотной шкалы абсолютных значений. Ротор содержит первый профиль обмотки стороны ротора и второй профиль обмотки стороны ротора, имеющие взаимно разные шаги между проводниками, а статор содержит первый профиль обмотки стороны статора и второй профиль обмотки стороны статора, каждый имеет разные шаги между проводниками. Более того, в шкале абсолютных значений соотношение между шагом Pm между проводниками первого профиля обмотки стороны ротора и шагом Ps между проводниками второго профиля обмотки стороны ротора установлено так, чтобы удовлетворять Ps=360/((360/Pm)+1), а относительное положение между первым и вторым профилями обмотки стороны ротора и первым и вторым профилями обмотки стороны статора установлено из условия, чтобы оба из детектированного угла Om, найденного на основе наведенного напряжения первого профиля обмотки стороны ротора, и детектированного угла Os, найденного на основе наведенного напряжения второго профиля обмотки стороны ротора, становились равными 0°, когда абсолютный угол ротора равен 0°. Более того, шкала абсолютных значений содержит средство расчета для определения детектированного угла Om на основе наведенного напряжения первого профиля обмотки стороны ротора, определения детектированного угла Os на основе наведенного напряжения второго профиля обмотки стороны ротора, определения значения D на основе уравнения D=Os-Om, определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением, определения значения E на основе уравнения E=D, когда значение D является неотрицательным значением, и определения абсолютного угла Z ротора на основе уравнения Z=E×360/Ps+Om. При этом в случае, когда абсолютная шкала является линейной абсолютной шкалой, профили обмотки стороны ползуна соответствуют профилям обмотки стороны ползуна линейной шкалы абсолютных значений, ползун соответствует ползуну линейной шкалы абсолютных значений, профили обмотки стороны шкалы соответствуют профилям обмотки стороны шкалы линейной шкалы абсолютных значений, а шкала соответствует шкале линейной шкалы абсолютных значений. Ползун содержит первый профиль обмотки стороны ползуна и второй профиль обмотки стороны ползуна, каждый из которых имеет разный шаг между проводниками, а шкала включает в себя первый профиль обмотки стороны шкалы и второй профиль обмотки стороны шкалы, каждый из которых имеет разный шаг между проводниками. Более того, в шкале абсолютных значений соотношение между шагом Pm между проводниками первого профиля обмотки стороны шкалы и шагом Ps между проводниками второго профиля обмотки стороны шкалы установлено так, что удовлетворяет уравнению Ps=L/((L/Pm)+1), где: L - величина перемещения полной линейной шкалы абсолютных значений, при этом относительное положение между первым и вторым профилями обмотки стороны ползуна и первым и вторым профилями обмотки стороны шкалы установлено из условия, что оба из величины перемещения Om, найденного на основе наведенного напряжения первого профиля обмотки стороны шкалы, и величины перемещения Os, найденного на основе наведенного напряжения второго профиля обмотки стороны шкалы, становились равными 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм. Более того, шкала абсолютных значений содержит средство расчета для определения детектированной величины перемещения Om на основе наведенного напряжения первого профиля обмотки стороны шкалы, определения детектированной величины перемещения Os на основе наведенного напряжения второго профиля обмотки стороны шкалы, определения значения D на основе уравнения D=Os-Om, определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением, определения значения E на основе уравнения E=D, когда значение D является неотрицательным значением, и определения абсолютной величины перемещения Z ползуна на основе уравнения Z=E×L/Ps+Om.
Шкала абсолютных значений согласно шестому аспекту настоящего изобретения содержит шкалу абсолютных значений по пятому аспекту, в которой, если шкала абсолютных значений является поворотной шкалой абсолютных значений, оперативное средство корректирует оба из детектированных углов Om и Os, чтобы они стали равны 0°, когда абсолютный угол ротора равен 0°, согласно величинам отклонений детектированных углов Om и Os от 0°, полученных предварительным экспериментом, когда абсолютный угол ротора равен 0°. В случае, где шкала абсолютных значений является линейной шкалой абсолютных значений, исполнительное средство корректирует обе из детектированных величин перемещения Om и Os, чтобы они стали равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, согласно величинам отклонений детектированных величин перемещений Om и Os от 0 мм, полученных предварительным экспериментом, когда абсолютная величина перемещения ползуна равна 0 мм.
Шкала абсолютных значений согласно седьмому аспекту настоящего изобретения содержит шкалу абсолютных значений, включающую в себя ползун, имеющий первый профиль обмотки стороны ползуна и второй профиль обмотки ползуна, каждый снабженный разным шагом между проводниками, и шкалу, имеющую первый профиль стороны шкалы и второй профиль обмотки стороны шкалы, причем каждый имеет разный шаг между проводниками, при этом ползун и шкала расположены так, что обращены друг к другу, так что первый и второй профили обмотки стороны ползуна и первый и второй профили обмотки стороны шкалы обращены одни к другим. В случае, если абсолютная шкала является поворотной абсолютной шкалой, соответственно, первый профиль обмотки стороны ползуна и второй профиль обмотки стороны ползуна соответствуют первому профилю обмотки стороны статора и второму профилю обмотки стороны статора поворотной шкалы абсолютных значений, ползун соответствует статору поворотной шкалы абсолютных значений, соответственно, первый профиль обмотки стороны шкалы и второй профиль обмотки стороны шкалы соответствуют первому профилю обмотки стороны ротора и второму профилю обмотки стороны ротора поворотной шкалы абсолютных значений, а шкала соответствует ротору поворотной шкалы абсолютных значений. Более того, в шкале абсолютных значений соотношение между шагом Pm между проводниками первого профиля обмотки стороны ротора и шагом Ps между проводниками второго профиля обмотки стороны ротора удовлетворяет соотношению Ps=360/((360/Pm)+1), а относительное положение между первым и вторым профилями обмотки стороны ротора и первым и вторым профилями обмотки стороны статора удовлетворяют условию, что оба из детектированного угла Om, найденного на основе наведенного напряжения первого профиля обмотки стороны ротора, и детектированного угла Os, найденного на основе наведенного напряжения второго профиля обмотки стороны ротора, становятся равными 0°, когда абсолютный угол ротора равен 0°. Более того, шкала абсолютных значений содержит средство расчета для: определения детектированного угла Om на основе наведенного напряжения первого профиля обмотки стороны ротора; определения детектированного угла Os на основе наведенного напряжения второго профиля обмотки стороны ротора; определения значения D на основе уравнения D=Os-Om, определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением; определения значения E на основе уравнения E=D, когда значение D является неотрицательным значением; и определения абсолютного угла Z ротора на основе уравнения Z=E×360/Ps+Om. В случае, когда абсолютная шкала является линейной абсолютной шкалой, соответственно, первый профиль обмотки стороны ползуна и второй профиль обмотки стороны ползуна соответствуют первому профилю обмотки стороны ползуна и второму профилю обмотки стороны шкалы линейной шкалы абсолютных значений, ползун соответствует ползуну линейной шкалы абсолютных значений, соответственно, первый профиль обмотки стороны шкалы и второй профиль обмотки стороны шкалы соответствуют первому профилю обмотки стороны шкалы и второму профилю обмотки стороны шкалы линейной шкалы абсолютных значений, а шкала соответствует шкале линейной шкалы абсолютных значений. Более того, в шкале абсолютных значений соотношение между шагом Pm между проводниками первого профиля обмотки стороны шкалы и шагом Ps между проводниками второго профиля обмотки стороны шкалы установлено так, чтобы удовлетворять соотношению Ps=L/((L/Pm)+1), где L - детектированная величина перемещения полной линейной шкалы абсолютных значений, при этом относительное положение между первым и вторым профилями обмотки стороны ползуна и первым и вторым профилями обмотки стороны шкалы установлено так, чтобы обе из детектированной величины перемещения Om, определенной на основе наведенного напряжения первого профиля обмотки стороны шкалы, и детектированной величины перемещения Os, определенной на основе наведенного напряжения второго профиля обмотки стороны шкалы, были равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм. Кроме того, шкала абсолютных значений содержит средство расчета для: определения детектированной величины перемещения Om на основе наведенного напряжения первого профиля обмотки стороны шкалы; определения детектированной величины перемещения Os на основе наведенного напряжения второго профиля обмотки стороны шкалы; определения значения D на основе уравнения D=Os-Om; определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением; определения значения E на основе уравнения E=D, когда значение D является неотрицательным значением; и определения абсолютной величины перемещения Z ползуна на основе уравнения Z=E×L/Ps+Om.
Шкала абсолютных значений согласно восьмому аспекту настоящего изобретения содержит шкалу абсолютных значений согласно седьмому аспекту, в которой, в случае, когда шкала абсолютных значений является поворотной шкалой абсолютных значений, оперативное средство корректирует оба из детектированных углов Om и Os до 0°, когда абсолютный угол ротора равен или должен стать равным 0°, согласно величинам отклонений детектированных углов Om и Os от 0°, полученных предварительным экспериментом, когда абсолютный угол ротора равен 0°. В случае, когда шкала абсолютных значений является линейной шкалой абсолютных значений, исполнительное средство корректирует обе из детектированных величин перемещения Om и Os, чтобы стать равными 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, согласно величинам отклонений детектированных величин перемещения Om и Os от 0 мм, полученных в предварительном эксперименте, когда абсолютная величина перемещения ползуна равна 0 мм, полученному в предварительным эксперименте.
Способ расчета абсолютного значения согласно девятому аспекту настоящего изобретения является способом расчета абсолютного значения величины перемещения ползуна в шкале абсолютных значений, содержащей ползун, имеющий первый профиль обмотки стороны ползуна и второй профиль обмотки стороны ползуна, каждый из которых имеет разный шаг между проводниками, и шкалу, имеющую первый профиль стороны шкалы и второй профиль обмотки стороны шкалы, каждый из которых имеет разный шаг между проводниками, причем ползун и шкала расположены так, что обращены друг к другу, причем первый и второй профили обмотки стороны ползуна и первый и второй профили обмотки стороны шкалы обращены одни к другим. В случае, когда абсолютная шкала является поворотной абсолютной шкалой, соответственно, первый профиль обмотки стороны ползуна и второй профиль обмотки стороны ползуна соответствуют первому профилю обмотки стороны статора и второму профилю обмотки стороны статора поворотной шкалы абсолютных значений, ползун соответствует статору поворотной шкалы абсолютных значений, первый профиль обмотки стороны шкалы и второй профиль обмотки стороны шкалы соответствуют первому профилю обмотки стороны ротора и второму профилю обмотки стороны ротора поворотной шкалы абсолютных значений, шкала соответствует ротору поворотной шкалы абсолютных значений, а абсолютное значение величины перемещения ползуна соответствует абсолютному углу ротора поворотной шкалы абсолютных значений. Кроме того, соотношение между шагом Pm между проводниками первого профиля обмотки стороны ротора и шагом Ps между проводниками второго профиля обмотки стороны ротора удовлетворяет соотношению Ps=360/((360/Pm)+1), а относительное положение между первым и вторым профилями обмотки стороны ротора и первым и вторым профилями обмотки стороны статора установлено из условия, что оба из детектированного угла Om, определенного на основе наведенного напряжения первого профиля обмотки стороны ротора, и детектированного угла Os, определенного на основе наведенного напряжения второго профиля обмотки стороны ротора, стали равны 0°, когда абсолютный угол ротора равен 0°. Способ содержит также этапы: определения детектированного угла Om на основе наведенного напряжения первого профиля обмотки стороны ротора; определения детектированного угла Os на основе наведенного напряжения второго профиля обмотки стороны ротора; определения значения D на основе уравнения D=Os-Om; определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением; определения значения E на основе уравнения E=D, когда значение D является неотрицательным значением, и определения абсолютного угла Z ротора на основе уравнения Z=E×360/Ps+Om. В случае, когда абсолютная шкала является линейной абсолютной шкалой, соответственно, первый профиль обмотки стороны ползуна и второй профиль обмотки стороны ползуна соответствуют первому профилю обмотки стороны ползуна и второму профилю обмотки стороны шкалы линейной шкалы абсолютных значений, ползун соответствует ползуну линейной шкалы абсолютных значений, соответственно, первый профиль обмотки стороны шкалы и второй профиль обмотки стороны шкалы соответствуют первому профилю обмотки стороны шкалы и второму профилю обмотки стороны шкалы линейной шкалы абсолютных значений, шкала соответствует шкале линейной шкалы абсолютных значений, а абсолютное значение величины перемещения ползуна соответствует абсолютной величине перемещения ползуна линейной шкалы абсолютных значений. Кроме того, соотношение между шагом Pm между проводниками первого профиля обмотки стороны шкалы и шагом Ps между проводниками второго профиля обмотки стороны шкалы установлено, чтобы удовлетворять Ps=L/((L/Pm)+1), где L - детектированная величина перемещения полной линейной шкалы абсолютных значений, а относительное положение между первым и вторым профилями обмотки стороны ползуна и первым и вторым профилями обмотки стороны шкалы установлено так, что обе из детектированной величины перемещения Om, определенной на основе наведенного напряжения первого профиля обмотки стороны шкалы, и детектированной величины перемещения Os, определенной на основе наведенного напряжения второго профиля обмотки стороны шкалы, были равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм. Кроме того, способ включает в себя этапы: определения детектированной величины перемещения Om на основе наведенного напряжения первого профиля обмотки стороны шкалы; определения детектированной величины перемещения Os на основе наведенного напряжения второго профиля обмотки стороны шкалы; определения значения D на основе уравнения D=Os-Om; определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением; определения значения E на основе уравнения E=D, когда значение D является неотрицательным значением; и определения абсолютной величины перемещения Z ползуна на основе уравнения Z=E×L/Ps+Om.
Способ расчета абсолютного значения согласно десятому аспекту настоящего изобретения представляет собой способ расчета абсолютного значения согласно девятому аспекту, в котором, в случае, когда шкала абсолютных значений является поворотной шкалой абсолютных значений, оба из детектированных углов Om и Os относительно 0 корректируются, чтобы стать равными 0°, когда абсолютный угол ротора равен 0°, согласно величинам отклонений детектированных углов Om и Os от 0°, полученных в предварительном эксперименте, когда абсолютный угол ротора равен 0°. В случае, когда шкала абсолютных значений является линейной шкалой абсолютных значений, обе из детектированных величин перемещения Om и Os корректируются, чтобы стать равными 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, согласно величинам отклонений детектированных величин перемещений Om и Os от 0 мм, полученных в предварительном эксперименте, когда абсолютная величина перемещения ползуна равна 0 мм.
Согласно шкале абсолютных значений по первому аспекту, многочисленные профили обмотки стороны ползуна являются ламинированными, и многочисленные профили обмотки стороны шкалы также являются ламинированными. Соответственно, в отличие от традиционного случая предоставления многочисленных профилей обмоток в одной и той же плоскости возможно увеличивать пространство, занимаемое каждым из профилей обмоток (длин в радиальном направлении соответственных профилей обмоток), не увеличивая размера в целом шкалы абсолютных значений. Благодаря этому возможно снижать неблагоприятное воздействие, обусловленное технологическими отклонениями шкалы абсолютных значений, а точность детектирования абсолютной величины перемещения ползуна (абсолютного угла ротора поворотной шкалы абсолютных значений или абсолютной величины перемещения линейной шкалы абсолютных значений) в силу этого стабилизируется.
Согласно шкале абсолютных значений по второму аспекту, шкала абсолютных значений содержит средство питания для подачи переменных токов на каждый из профилей обмотки стороны ползуна для ползуна с разными временными привязками. Соответственно, даже в случае конструкции, сформированной ламинированием многочисленных профилей обмотки стороны ползуна и ламинированием многочисленных профилей обмотки стороны шкалы, возможно гарантировать точность детектирования абсолютной величины перемещения ползуна (абсолютного угла ротора поворотной шкалы абсолютных значений или абсолютной величины перемещения линейной шкалы абсолютных значений) наряду со снижением электромагнитных помех между этими слоями.
Согласно шкале абсолютных значений по третьему аспекту, шкала абсолютных значений содержит средство питания для подачи переменных токов, имеющих разные частоты, на каждый из профилей обмотки стороны ползуна для ползуна, и фильтры, предусмотренные на каждом из выходных концов профилей обмотки стороны шкалы для шкалы и сконфигурированные для среза напряжения, имеющего частоту, отличную от частоты исходного наведенного напряжения в каждом из профилей обмотки стороны шкалы. Соответственно, даже в случае конструкции, сформированной ламинированием многочисленных профилей обмотки стороны ползуна и ламинированием многочисленных профилей обмотки стороны шкалы, возможно гарантировать точность детектирования абсолютной величины перемещения ползуна (абсолютного угла ротора поворотной шкалы абсолютных значений или абсолютной величины перемещения линейной шкалы абсолютных значений) наряду со снижением электромагнитных помех между этими слоями.
Согласно шкале абсолютных значений по четвертому аспекту, средство питания подает переменные токи в каждый из профилей обмотки стороны ползуна для ползуна с разными временными привязками. Соответственно, возможно более надежно гарантировать точность детектирования абсолютной величины перемещения ползуна (абсолютного угла ротора поворотной шкалы абсолютных значений или абсолютной величины перемещения линейной шкалы абсолютных значений) наряду со снижением электромагнитных помех между этими слоями.
Согласно шкале абсолютных значений по пятому аспекту, в случае, когда абсолютная шкала является поворотной абсолютной шкалой, шкала абсолютных значений содержит средство расчета для установки соотношения между шагом Pm между проводниками первого профиля обмотки стороны ротора и шагом Ps между проводниками второго профиля обмотки стороны ротора, чтобы удовлетворять уравнению Ps=360/((360/Pm)+1); для установки относительного положения между первым и вторым профилями обмотки стороны ротора и первым и вторым профилями обмотки стороны статора, так что оба из детектированного угла Om, определенного на основе наведенного напряжения первого профиля обмотки стороны ротора, и детектированного угла Os, определенного на основе наведенного напряжения второго профиля обмотки стороны ротора, стали равны 0°, когда абсолютный угол ротора равен 0°, а также для: определения детектированного угла Om на основе наведенного напряжения первого профиля обмотки стороны ротора; определения детектированного угла Os на основе наведенного напряжения второго профиля обмотки стороны ротора; определения значения D на основе уравнения D=Os-Om; определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением; определения значения E на основе уравнения E=D, когда значение D является неотрицательным значением; и определения абсолютного угла Z ротора на основе уравнения Z=E×360/Ps+Om. В случае, когда абсолютная шкала является линейной абсолютной шкалой, шкала абсолютных значений содержит средство расчета для: установки соотношения между шагом Pm между проводниками первого профиля обмотки стороны шкалы и шагом Ps между проводниками второго профиля обмотки стороны шкалы, чтобы удовлетворять соотношению Ps=L/((L/Pm)+1), где L - детектированная величина перемещения полной линейной шкалы абсолютных значений; для установки относительного положения между первым и вторым профилями обмотки стороны ползуна и первым и вторым профилями обмотки стороны шкалы, так чтобы обе из детектированной величины перемещения Om, определенной на основе наведенного напряжения первого профиля обмотки стороны шкалы, и детектированной величины перемещения Os, определенной на основе наведенного напряжения второго профиля обмотки стороны шкалы, стали равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм; а также для: определения детектированной величины перемещения Om на основе наведенного напряжения первого профиля обмотки стороны шкалы; определения детектированной величины перемещения Os на основе наведенного напряжения второго профиля обмотки стороны шкалы, определения значения D на основе уравнения D=Os-Om; определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением; определения значения E на основе уравнения E=D, когда значение D является неотрицательным значением; и определения абсолютной величины перемещения Z ползуна на основе уравнения Z=E×L/Ps+Om. Соответственно, является возможным рассчитывать абсолютный угол ротора поворотной шкалы абсолютных значений или абсолютную величину перемещения линейной шкалы абсолютных значений легко и достоверно.
Согласно шкале абсолютных значений по шестому аспекту, в случае, когда шкалой абсолютных значений является поворотная шкала абсолютных значений, исполнительное средство корректирует оба из детектированных углов Om и Os до 0°, когда абсолютный угол ротора равен 0°, согласно величинам отклонений детектированных углов Om и Os от 0°, полученным в предварительном эксперименте, когда абсолютный угол ротора равен 0°. В случае, когда шкала абсолютных значений является линейной шкалой абсолютных значений, исполнительное средство корректирует обе из детектированных величин перемещения Om и Os до 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, согласно величинам отклонений детектированных величин перемещения Om и Os от 0 мм, полученным в предварительном эксперименте, когда абсолютная величина перемещения ползуна равна 0 мм. Соответственно, даже если шкала абсолютных значений содержит в себе технологическое отклонение, возможно гарантировать точность детектирования абсолютного угла ротора поворотной шкалы абсолютных значений или абсолютной величины перемещения линейной шкалы абсолютных значений.
Согласно шкале абсолютных значений по седьмому аспекту, в случае, когда абсолютная шкала является поворотной абсолютной шкалой, шкала абсолютных значений содержит средство расчета для: установки соотношения между шагом Pm между проводниками первого профиля обмотки стороны ротора и шагом Ps между проводниками второго профиля обмотки стороны ротора, чтобы удовлетворять уравнению Ps=360/((360/Pm)+1); установки относительного положения между первым и вторым профилями обмотки стороны ротора и первым и вторым профилями обмотки стороны статора, из условия, что оба из детектированного угла Om, найденного на основе наведенного напряжения первого профиля обмотки стороны ротора, и детектированного угла Os, найденного на основе наведенного напряжения второго профиля обмотки стороны ротора, стали равны 0°, когда абсолютный угол ротора равен 0°, а также для: определения детектированного угла Om на основе наведенного напряжения первого профиля обмотки стороны ротора; определения детектированного угла Os на основе наведенного напряжения второго профиля обмотки стороны ротора; определения значения D на основе уравнения D=Os-Om; определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением; определения значения E на основе уравнения E=D, когда значение D является неотрицательным значением; и определения абсолютного угла Z ротора на основе уравнения Z=E×360/Ps+Om. В случае, когда абсолютная шкала является линейной абсолютной шкалой, шкала абсолютных значений содержит средство расчета для: установки соотношения между шагом Pm между проводниками первого профиля обмотки стороны шкалы и шагом Ps между проводниками второго профиля обмотки стороны шкалы, чтобы удовлетворять соотношению Ps=L/((L/Pm)+1), где L - детектированная величина перемещения полной линейной шкалы абсолютных значений; для установки относительного положения между первым и вторым профилями обмотки стороны ползуна и первым и вторым профилями обмотки стороны шкалы, из условия, что обе из детектированной величины перемещения Om, определенного на основе наведенного напряжения первого профиля обмотки стороны шкалы, и детектированной величины перемещения Os, определенного на основе наведенного напряжения второго профиля обмотки стороны шкалы, стали равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, а также для определения детектированной величины перемещения Om на основе наведенного напряжения первого профиля обмотки стороны шкалы; определения детектированной величины перемещения Os на основе наведенного напряжения второго профиля обмотки стороны шкалы; определения значения D на основе уравнения D=Os-Om; определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением; определения значения E на основании уравнения E=D, когда значение D является неотрицательным значением; и определения абсолютной величины перемещения Z ползуна на основании уравнения Z=E×L/Ps+Om. Соответственно, является возможным рассчитывать абсолютный угол ротора поворотной шкалы абсолютных значений или абсолютную величину перемещения линейной шкалы абсолютных значений легко и достоверно.
Согласно шкале абсолютных значений по восьмому аспекту, в случае, когда шкалой абсолютных значений является поворотная шкала абсолютных значений, исполнительное средство корректирует оба из детектированных углов Om и Os, так чтобы они были равны 0°, когда абсолютный угол ротора равен 0°, согласно величинам отклонений детектированных углов Om и Os от 0°, полученных предварительным экспериментом, когда абсолютный угол ротора равен 0°. В случае, когда шкала абсолютных значений является линейной шкалой абсолютных значений, исполнительное средство корректирует обе из детектированных величин перемещения Om и Os, чтобы они стали равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, согласно величинам отклонений детектированных величин перемещения Om и Os от 0 мм, полученных в предварительном эксперименте, когда абсолютная величина перемещения ползуна равна 0 мм. Соответственно, даже если шкала абсолютных значений содержит в себе технологическое отклонение, возможно гарантировать точность детектирования абсолютного угла ротора поворотной шкалы абсолютных значений или абсолютной величины перемещения линейной шкалы абсолютных значений.
Согласно способу расчета абсолютного значения по девятому аспекту, в случае, когда абсолютная шкала, используемая в нем, является поворотной абсолютной шкалой, способ включает в себя этапы установки соотношения между шагом Pm между проводниками первого профиля обмотки стороны ротора и шагом Ps между проводниками второго профиля обмотки стороны ротора, чтобы удовлетворять соотношению Ps=360/((360/Pm)+1); установки относительного положения между первым и вторым профилями обмотки стороны ротора и первым и вторым профилями обмотки стороны статора, из условия, что оба из детектированного угла Om, определенного на основе наведенного напряжения первого профиля обмотки стороны ротора, и детектированного угла Os, определенного на основе наведенного напряжения второго профиля обмотки стороны ротора, стали равны 0°, когда абсолютный угол ротора равен 0°, а также определения детектированного угла Om на основе наведенного напряжения первого профиля обмотки стороны ротора; определения детектированного угла Os на основе наведенного напряжения второго профиля обмотки стороны ротора; определения значения D на основе уравнения D=Os-Om; определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением; определения значения E на основе уравнения E=D, когда значение D является неотрицательным значением, и определения абсолютного угла Z ротора согласно уравнению Z=E×360/Ps+Om. В случае, когда абсолютная шкала является линейной абсолютной шкалой, способ включает в себя этапы: установки соотношения между шагом Pm между проводниками первого профиля обмотки стороны шкалы и шагом Ps между проводниками второго профиля обмотки стороны шкалы, чтобы удовлетворять соотношению Ps=L/((L/Pm)+1), где L - детектированная величина перемещения полной линейной шкалы абсолютных значений; установки относительного положения между первым и вторым профилями обмотки стороны ползуна и первым и вторым профилями обмотки стороны шкалы, из условия, что обе из детектированной величины перемещения Om, определенной на основе наведенного напряжения первого профиля обмотки стороны шкалы, и детектированной величины перемещения Os, определенной на основе наведенного напряжения второго профиля обмотки стороны шкалы, стали равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, а также определения детектированной величины перемещения Om на основе наведенного напряжения первого профиля обмотки стороны шкалы; определения детектированной величины перемещения Os на основе наведенного напряжения второго профиля обмотки стороны шкалы; определения значения D на основе уравнения D=Os-Om; определения значения E на основе уравнения E=D+Ps, когда значение D является отрицательным значением; определения значения E на основе уравнения E=D, когда значение D является неотрицательным значением; и определения абсолютной величины перемещения Z ползуна на основе уравнения Z=E×L/Ps+Om. Соответственно, является возможным рассчитывать абсолютный угол ротора поворотной шкалы абсолютных значений или абсолютную величину перемещения линейной шкалы абсолютных значений легко и достоверно.
Согласно способу расчета абсолютного значения по десятому аспекту, в случае, когда шкалой абсолютных значений является поворотная шкала абсолютных значений, оба из детектированных углов Om и Os относительно 0 корректируются, чтобы они были равны 0°, когда абсолютный угол ротора равен 0°, согласно величинам отклонений детектированных углов Om и Os от 0°, полученных в предварительном эксперименте, когда абсолютный угол ротора равен 0°. В случае, когда шкала абсолютных значений является линейной шкалой абсолютных значений, обе из детектированных величин перемещения Om и Os корректируются, так что равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, согласно величинам отклонений детектированных величин перемещений Om и Os от 0 мм, полученных в предварительном эксперименте, когда абсолютная величина перемещения ползуна равна 0 мм. Соответственно, даже если шкала абсолютных значений содержит в себе технологическое отклонение, возможно гарантировать точность детектирования абсолютного угла ротора поворотной шкалы абсолютных значений или абсолютной величины перемещения линейной шкалы абсолютных значений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
Фиг.1 изображает общий вид профилей обмотки стороны ротора и профилей обмотки стороны статора поворотной шкалы абсолютных значений, согласно первому варианту осуществления настоящего изобретения;
Фиг.2A-2D - виды спереди профилей обмотки стороны ротора и профилей обмотки стороны статора, согласно изобретению;
Фиг.3A - вид спереди статора, составляющего поворотную шкалу абсолютных значений, согласно изобретению;
Фиг.3B - вид сбоку в разрезе статора, составляющего поворотную шкалу абсолютных значений, согласно изобретению;
Фиг.4A - вид спереди ротора, составляющего поворотную шкалу абсолютных значений, согласно изобретению;
Фиг.4B - вид сбоку в разрезе ротора, составляющего поворотную шкалу абсолютных значений, согласно изобретению;
Фиг.5 - вид сбоку в разрезе общей конфигурации поворотной шкалы абсолютных значений, согласно изобретению;
Фиг.6 - схему цепей поворотной шкалы абсолютных значений, согласно изобретению;
Фиг.7 - схему еще одной конфигурации цепей поворотной шкалы абсолютных значений, согласно изобретению;
Фиг.8 - диаграмму последовательности операций для расчета абсолютного угла посредством использования устройства управления шкалой поворотной шкалы абсолютных значений, согласно изобретению;
Фиг.9 - другую диаграмму последовательности операций для расчета абсолютного угла посредством использования устройства управления шкалой поворотной шкалы абсолютных значений, согласно изобретению;
Фиг.10 - еще одну диаграмму последовательности операций для расчета абсолютного угла посредством использования устройства управления шкалой поворотной шкалы абсолютных значений, согласно изобретению;
Фиг.11 - еще одну диаграмму последовательности операций для расчета абсолютного угла посредством использования устройства управления шкалой поворотной шкалы абсолютных значений, согласно изобретению;
Фиг.12 - еще одну диаграмму последовательности операций для расчета абсолютного угла посредством использования устройства управления шкалой поворотной шкалы абсолютных значений, согласно изобретению;
Фиг.13 - еще одну диаграмму последовательности операций для расчета абсолютного угла посредством использования устройства управления шкалой поворотной шкалы абсолютных значений, согласно изобретению;
Фиг.14 - общий вид профилей обмотки стороны ползуна и профилей обмотки стороны шкалы линейной шкалы абсолютных значений, согласно второму варианту осуществления настоящего изобретения;
Фиг.15A-15D - виды спереди профилей обмотки стороны ползуна и профилей обмотки стороны шкалы, согласно изобретению;
Фиг.16A - вид спереди ползуна, составляющего линейную шкалу абсолютных значений, согласно изобретению;
Фиг.16B - вид сбоку в разрезе ползуна, составляющего линейную шкалу абсолютных значений, согласно изобретению;
Фиг.17A - вид спереди шкалы, составляющей линейную шкалу абсолютных значений, согласно изобретению;
Фиг.17B - вид сбоку в разрезе шкалы, составляющей линейную шкалу абсолютных значений, согласно изобретению;
Фиг.18 - вид сбоку в разрезе общей конфигурации линейной шкалы абсолютных значений, согласно изобретению;
Фиг.19 - схему конфигурации цепей линейной шкалы абсолютных значений, согласно изобретению;
Фиг.20 - схему еще одной конфигурации цепей линейной шкалы абсолютных значений, согласно изобретению;
Фиг.21 - диаграмму последовательности операций для расчета абсолютной величины перемещения посредством использования устройства управления шкалой линейной шкалы абсолютных значений, согласно изобретению;
Фиг.22 - еще одну диаграмму последовательности операций для расчета абсолютной величины перемещения посредством использования устройства управления шкалой линейной шкалы абсолютных значений, согласно изобретению;
Фиг.23 - еще одну диаграмму последовательности операций для расчета абсолютной величины перемещения посредством использования устройства управления шкалой линейной шкалы абсолютных значений, согласно изобретению;
Фиг.24 - еще одну диаграмму для пояснения содержания последовательности операций для расчета абсолютной величины перемещения посредством использования устройства управления шкалой линейной шкалы абсолютных значений, согласно изобретению;
Фиг.25 - еще одну диаграмму для пояснения содержания последовательности операций для расчета абсолютной величины перемещения посредством использования устройства управления шкалой линейной шкалы абсолютных значений, согласно изобретению;
Фиг.26 - еще одну диаграмму для пояснения содержания последовательности операций для расчета абсолютной величины перемещения посредством использования устройства управления шкалой линейной шкалы абсолютных значений;
Фиг.27A и 27B - виды спереди профиля обмотки стороны ротора и профиля обмотки стороны статора известной поворотной шкалы;
Фиг.28 - диаграмму изменения наведенного напряжения;
Фиг.29A и 29B - виды спереди профиля обмотки стороны ротора и профиля обмотки стороны статора известной поворотной шкалы абсолютных значений;
Фиг.30A - вид спереди статора известной поворотной шкалы абсолютных значений;
Фиг.30B - вид сбоку в разрезе статора известной поворотной шкалы абсолютных значений;
Фиг.31A и 31B - виды спереди профиля обмотки стороны ползуна и профиля обмотки стороны шкалы известной линейной шкалы абсолютных значений;
Фиг.32A - вид спереди ползуна известной линейной шкалы абсолютных значений;
Фиг.32B - вид сбоку в разрезе шкалы известной линейной шкалы абсолютных значений.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Первый вариант осуществления
На Фиг.1 представлен общий вид профилей обмотки стороны ротора и профилей обмотки стороны статора поворотной шкалы абсолютных значений согласно первому варианту осуществления настоящего изобретения.
Поворотная шкала абсолютных значений согласно первому варианту воплощения является шкалой абсолютных значений, с поворотной шкалой индуктосинного типа, допускающей детектирование абсолютного значения угла поворота (абсолютного угла). Поворотная шкала абсолютных значений содержит: ротор на поворотной стороне, имеющей профиль 31 обмотки стороны ротора (первый профиль обмотки стороны ротора) и профиль 32 обмотки стороны ротора (второй профиль обмотки стороны ротора), оба из которых имеют разные шаги между проводниками, сложенными зигзагообразно и сформированными, в целом, в кольцевые формы (фиг.1, 2A и 2C); и статор на неподвижной стороне, имеющей профиль 33 обмотки стороны статора (первый профиль обмотки стороны статора) и профиль 34 обмотки стороны статора (второй профиль обмотки стороны статора), оба из которых имеют разные шаги между проводниками, сложенными зигзагообразно и сформированными, в целом, в кольцевые формы (фиг.1, 2B и 2D). Ротор и статор расположены так, что обращены друг к другу, так что профили 31 и 32 обмотки стороны ротора могут быть обращены к профилям 33 и 34 обмотки стороны статора. Соответственно, ротор, профили обмотки стороны ротора, статор и профили обмотки стороны статора в этой поворотной шкале абсолютных значений соответствуют шкале, профилям обмотки стороны шкалы, ползуну и профилям обмотки стороны ползуна в линейной шкале абсолютных значений.
Как показано на фиг.2A-2D, два профиля 31 и 32 обмотки стороны ротора имеют разные шаги Pm град. и Ps град. (где Ps<Pm) между проводниками, соответственно, и два профиля 33 и 34 обмотки стороны статора также имеют разные шаги Pm' град. и Ps' град. (где Ps'<Pm'), соответственно, соответствующие шаги Pm и Ps между проводниками профилей 31 и 32 обмотки стороны ротора.
Кроме того, в первом варианте осуществления два профиля 31 и 32 обмотки стороны ротора ламинируют, чтобы устанавливать в разных плоскостях (фиг.1), вместо того, чтобы устанавливать в одной плоскости, как в известной технологии. Два профиля 33 и 34 обмотки стороны ротора также ламинируют, чтобы устанавливать в разных плоскостях (фиг.1), вместо того, чтобы устанавливать в одной плоскости, как в известной технологии.
Далее конфигурации статора и ротора будут описаны более подробно со ссылками на фиг.3-5.
Статор 41 (фиг.3A и 3B) поворотной шкалы абсолютных значений сформирован фиксацией посредством использования средства фиксации, такого как связующий материал, многослойной печатной платы 43 на поверхности базовой детали 42 для обеспечения прочности. Кроме того, профиль 33 обмотки стороны статора и профиль 34 обмотки стороны статора, соответственно, отпечатаны на первом слое (поверхностном слое) и втором слое (внутреннем слое) многослойной печатной платы 43, и два слоя ламинированы. Внутренние провода 44 также отпечатаны на слоях многослойной печатной платы 43, а профили 33 и 34 обмотки стороны статора электрически присоединены к внешним проводам 45 через внутренние провода 44. Внешние провода 45 электрически присоединены к устройству управления шкалой (фиг.6 и 7, более подробно описано ниже). Вторичные обмотки 48A и 48B трансформаторов 47A и 47B расположены в пазу 46 для прокладки проводов, сформированном на многослойной печатной плате 43.
Ротор 51 (фиг.4A и 4B) поворотной шкалы абсолютных значений сформирован фиксацией посредством использования средства фиксации, такого как связующий материал, многослойной печатной платы 53 на поверхность базовой детали 52 для обеспечения прочности. Профиль 31 обмотки стороны ротора и профиль 32 обмотки стороны ротора соответственно отпечатаны на первом слое (поверхностном слое) и втором слое (внутреннем слое) многослойной печатной платы 53, и два слоя ламинированы. Более того, первичные обмотки 58A и 58B трансформаторов 47A и 47B расположены в пазу 56 прокладки проводов, сформированном на многослойной печатной плате 53.
Ротор 51 (фиг.5) и статор 41 расположены так, что обращены друг к другу, так что профили 31 и 32 обмотки стороны ротора обращены к профилям 33 и 34 обмотки стороны статора. Ротор 51 посажен на поворотный вал механического станка или тому подобного и поворачивается, как указано стрелкой А, вместе с поворотным валом. Между тем, статор 41 посажен на неподвижную часть механического станка или тому подобного. При этом первичные обмотки 58 и вторичные обмотки 48 трансформаторов 47 также размещены напротив друг друга.
Поворотная шкала абсолютных значений может использовать любую из конфигураций цепей, показанных на фиг.6 и 7.
Устройство 61 (фиг.6) управления шкалой, служащее в качестве средства расчета, а также средства питания, содержит два источника 62 и 63 переменного тока. Источник 62 переменного тока электрически присоединен к профилю 33 обмотки стороны статора у статора 41 через внешний провод 45 и внутренний провод 44 и предназначен для подачи переменного тока частотой f на профиль 33 обмотки стороны статора. Еще один источник 63 переменного тока электрически присоединен к профилю 34 обмотки стороны статора для статора 41 через внешний провод 45 и внутренний провод 44 и предназначен для подачи переменного тока частотой f на этот профиль 34 обмотки стороны статора. Устройство 61 управления шкалой подает переменные токи в каждый из профилей 33 и 34 обмотки стороны статора для статора 41 в разные моменты времени. Более точно, подача электроэнергии из источника 62 переменного тока в профиль 33 обмотки стороны статора и подача электроэнергии из источника 63 переменного тока в профиль 34 обмотки стороны статора выполняются не одновременно, а со сдвигом во времени.
Первичная обмотка 58A трансформатора 47A электрически присоединена к профилю 31 обмотки стороны ротора для ротора 51 через внутренний провод 64 (который предусмотрен в каждой части многослойной печатной платы 53 ротора 51 в виде печатного проводника или тому подобного). Первичная обмотка 58B трансформатора 47B электрически присоединена к профилю 32 обмотки стороны ротора для ротора 51 через внутренний провод 64. Входной конец схемы 65 усилителя электрически присоединен к вторичной обмотке 48A трансформатора 47A через внутренний провод 44, а входной конец схемы 66 усилителя электрически присоединен ко вторичной обмотке 48B трансформатора 47B через внутренний провод 44. Схемы 65 и 66 усилителей предусмотрены в многослойной печатной плате 43 статора 41. Выходные концы схем 65 и 66 усилителей электрически присоединены к устройству 61 управления шкалой через внешние провода 45.
Соответственно, в случае конфигурации цепей, показанной на фиг.6, когда переменный ток частотой f подается из источника 62 переменного тока в профиль 33 обмотки стороны статора у статора 41, наведенное напряжение (напряжение частотой f) формируется на профиле 31 обмотки стороны ротора. Наведенное напряжение изменяется периодически (где период = одному шагу Pm между проводниками профиля 31 обмотки стороны ротора) в зависимости от угла поворота ротора 51 (профиля 31 обмотки стороны ротора), т.е. с изменением уровня индуктивной связи, соответствующим изменению позиционной корреляции между профилем 33 обмотки стороны статора и профилем 31 обмотки стороны ротора. Это наведенное напряжение передается с поворотной стороны (стороны ротора) на неподвижную сторону (сторону статора) через трансформатор 47A, включенный, соответственно, в поворотную сторону и неподвижную сторону. После этого, наведенное напряжение, переданное на неподвижную сторону, усиливается схемой 65 усилителя, а затем вводится в устройство 61 управления шкалой.
С другой стороны, когда переменный ток частотой f подается из источника 63 переменного тока в профиль 34 обмотки стороны статора у статора 41, наведенное напряжение (напряжение частотой f) формируется на профиле 32 обмотки стороны ротора. Наведенное напряжение изменяется периодически (в котором период = одному шагу Ps между проводниками профиля 32 обмотки стороны ротора) в зависимости от угла поворота ротора 51 (профиля 32 обмотки стороны ротора), т.е. с изменением уровня индуктивной связи, соответствующим изменению позиционной корреляции между профилем 34 обмотки стороны статора и профилем 32 обмотки стороны ротора. Это наведенное напряжение передается с поворотной стороны (стороны ротора) на неподвижную сторону (сторону статора) через трансформатор 47B, включенный, соответственно, в поворотную сторону и неподвижную сторону. После этого, наведенное напряжение, переданное на неподвижную сторону, усиливается схемой 66 усилителя, а затем вводится в устройство 61 управления шкалой. Устройство 61 управления шкалой рассчитывает абсолютное значение угла поворота (абсолютный угол) ротора 51 (такого как вращающийся вал механического станка или тому подобного, присоединенный к ротору 51) на основании наведенных напряжений, введенных из схем 65 и 66 усилителей, как будет подробно описано позже.
Ниже описана конфигурация цепей на фиг.7. Устройство 71 управления шкалой, служащее в качестве средства расчета, а также средства питания, содержит два источника 72 и 73 переменного тока. Источник 72 переменного тока электрически присоединен к профилю 33 обмотки стороны статора для статора 41 через внешний провод 45 и внутренний провод 44 и предназначен для подачи переменного тока частотой fm в профиль 33 обмотки стороны статора. Еще один источник 73 переменного тока электрически присоединен к профилю 34 обмотки стороны статора у статора 41 через внешний провод 45 и внутренний провод 44 и предназначен для подачи переменного тока частотой fs в профиль 34 обмотки стороны статора. Устройство 71 управления шкалой подает переменные токи с разными частотами fm и fs соответственно в профили 33 и 34 обмотки стороны статора у статора 41. Устройство 71 управления шкалой подает переменные токи в каждый из профилей 33 и 34 обмотки стороны статора для статора 41 в разные временные интервалы. Подача электроэнергии из источника 72 переменного тока в профиль 33 обмотки стороны статора и подача электроэнергии из источника 73 переменного тока в профиль 34 обмотки стороны статора выполняются не одновременно, а со сдвигом во времени.
Входной конец фильтра 74 электрически присоединен к профилю 31 обмотки стороны ротора у ротора 51 через внутренний провод 64 (который предусмотрен в каждой части многослойной печатной платы 53 ротора 51 в виде печатного проводника или тому подобного), а входной конец фильтра 75 электрически присоединен к профилю 32 обмотки стороны ротора у ротора 51 через внутренний провод 64. Первичная обмотка 58A трансформатора 47A электрически присоединена к выходному концу фильтра 74 через внутренний провод 64, а первичная обмотка 58B трансформатора 47B электрически присоединена к выходному концу фильтра 75 через внутренний провод 64. Каждый из фильтров 74 и 75 предусмотрен на многослойной печатной плате 53 ротора 51. Фильтр 74 срезает напряжение, имеющее частоту fs, тогда как другой фильтр 75 срезает напряжение, имеющее частоту fm.
Входной конец схемы 65 усилителя электрически присоединен к вторичной обмотке 48A трансформатора 47A через внутренний провод 44, а входной конец схемы 66 усилителя электрически присоединен к вторичной обмотке 48B трансформатора 47B через внутренний провод 44. Схемы 65 и 66 усилителей предусмотрены в многослойной печатной плате 43 статора 41. Выходные концы схем 65 и 66 усилителей электрически присоединены к устройству 71 управления шкалой через внешние провода 45.
Соответственно, в случае конфигурации цепей, показанной на фиг.7, когда переменный ток частотой fm подается из источника 72 переменного тока в профиль 33 обмотки стороны статора у статора 41, наведенное напряжение (напряжение частотой fm) формируется на профиле 31 обмотки стороны ротора. Наведенное напряжение изменяется периодически (где период = одному шагу Pm между проводниками профиля 31 обмотки стороны ротора) в зависимости от угла поворота ротора 51 (профиля 31 обмотки стороны ротора), т.е. с изменением уровня индуктивной связи, соответствующим изменению позиционной корреляции между профилем 33 обмотки стороны статора и профилем 31 обмотки стороны ротора. Это наведенное напряжение передается с поворотной стороны (стороны ротора) на неподвижную сторону (сторону статора) через трансформатор 47A, включенный в поворотную сторону и неподвижную сторону. При этом фильтр 74 предназначен для среза напряжения частотой fs, т.е. для среза напряжения, имеющего частоту, отличную от частоты fm исходного наведенного напряжения в профиле 31 обмотки стороны ротора. Соответственно, исходное наведенное напряжение частотой fm, которое сформировано посредством индуктивной связи между профилем 33 обмотки стороны статора и профилем 31 обмотки стороны ротора, не срезается, а пропускается через фильтр 74, чтобы передаваться на неподвижную сторону. После этого, наведенное напряжение, переданное на неподвижную сторону, усиливается схемой 65 усилителя, а затем вводится в устройство 71 управления шкалой.
Когда переменный ток частотой fs подается из источника 73 переменного тока в профиль 34 обмотки стороны статора у статора 41, наведенное напряжение (напряжение частотой fs) формируется на профиле 32 обмотки стороны ротора. Наведенное напряжение изменяется периодически (где период = одному шагу Ps между проводниками профиля 32 обмотки стороны ротора) в зависимости от угла поворота ротора 51 (профиля 32 обмотки стороны ротора), т.е. с изменением уровня индуктивной связи, соответствующим изменению позиционной корреляции между профилем 34 обмотки стороны статора и профилем 32 обмотки стороны ротора. Наведенное напряжение передается с поворотной стороны (стороны ротора) на неподвижную сторону (сторону статора) через трансформатор 47B, включенный в поворотную сторону и неподвижную сторону. В это время фильтр 75 предназначен для среза напряжения частотой fm, то есть для среза напряжения, имеющего частоту, отличную от частоты fs исходного наведенного напряжения в профиле 32 обмотки стороны ротора. Соответственно, исходное наведенное напряжение частотой fs, которое сформировано посредством индуктивной связи между профилем 34 обмотки стороны статора и профилем 32 обмотки стороны ротора, не срезается, а пропускается через фильтр 75 для передачи на неподвижную сторону. После этого, наведенное напряжение, переданное на неподвижную сторону, усиливается схемой 66 усилителя, а затем вводится в устройство 71 управления шкалой. Устройство 71 управления шкалой рассчитывает абсолютное значение угла поворота (абсолютный угол) ротора 51 (такого как вращающийся вал механического станка или тому подобного, присоединенный к ротору 51) на основании наведенных напряжений, введенных из схем 65 и 66 усилителей, как будет подробно описано ниже.
Последовательность операций для расчета абсолютного угла посредством использования устройства 61 или 71 управления шкалой описано со ссылками на фиг.8-13. Последовательность операций для расчета абсолютного угла является одинаковой для устройств 61 и 71 управления шкалой. Значения Om, Os, D, E и Z, рассчитываемые в последовательности операций расчета, показаны на фиг.8. Чтобы ясно проиллюстрировать варианты значений Om, Os, D, E и Z, эти значения показаны по отдельности на фиг.9-13.
На Фиг.8-13 шаг Pm между проводниками профиля 31 обмотки стороны ротора установлен в 72 град., а шаг Ps между проводниками профиля 32 обмотки стороны ротора установлен в 60 град. На фиг.8-13 поперечная ось соответствует углу поворота (абсолютный угол) ротора 51, а продольная ось соответствует значениям Om, Os, D, E и Z относительно угла поворота (абсолютного угла).
На фиг.8-13 значение Om, указанное сплошной линией, является углом поворота ротора 51, детектированным профилем 31 обмотки стороны ротора, имеющим шаг Pm между проводниками, а значение Os, указанное пунктирной линией, является углом поворота ротора 51, детектированным профилем 32 обмотки стороны ротора, имеющим шаг Ps между проводниками. Устройство 61 или 71 управления шкалой, во-первых, определяет детектированный угол Om на основании наведенного напряжения профиля 31 обмотки стороны ротора, а затем определяет детектированный угол Os на основании наведенного напряжения профиля 32 обмотки стороны ротора. Поскольку шаг Pm между проводниками установлен в 72 град. в данном примере, детектированный угол Om изменяется итеративно с периодом в 72 град. и имеет пилообразную форму (как показано). Поскольку шаг Ps между проводниками установлен в 60 град., детектированный угол Os изменяется итеративно с периодом в 60 град. и имеет пилообразную форму (как показано).
Относительное положение между профилями 31 и 32 (фиг.8-10) обмотки стороны ротора и профилями 33 и 34 обмотки стороны статора установлено из условия, что оба из детектированных углов Om и Os стали равны 0 град., когда угол поворота (абсолютный угол) ротора 51 равен 0 град. Однако возможно, что детектированные углы Om и Os не станут равны 0 град., когда угол поворота (абсолютный угол) ротора 51 равен 0 град., и формируется некоторое отклонение в детектированных углах Om и Os. Такое отклонение может быть следствием, например, поворотного отклонения ротора 51 относительно статора 41, основанного на технологическом отклонении поворотной шкалы абсолютных значений. Соответственно, величины отклонения (величина смещения) для этих детектированных углов Om и Os получаются заблаговременно посредством эксперимента и вводятся и сохраняются в устройстве 61 или 71 управления шкалой. Затем, согласно величинам отклонения (величине смещения), устройство 61 или 71 управления шкалой корректирует детектированные углы Om и Os, выведенные из наведенных напряжений. Устройство 61 или 71 управления шкалой вносит поправку (смещение), чтобы скорректировать оба из детектированных углов Om и Os, чтобы они были равны 0 град., когда угол поворота (абсолютный угол) ротора 51 равен 0 град., путем добавления либо вычитания величин отклонения (величины смещения) к или из детектированных углов Om и Os, полученных из наведенных напряжений.
Кроме того, соотношение между шагом Pm между проводниками и шагом Ps между проводниками должно удовлетворять следующим соотношениям (1) и (2). Формула (2) является модифицированной формой уравнения (1). Более точно, в диапазоне 360 град. количество шагов между проводниками профиля 32 обмотки стороны ротора, имеющей шаг Ps между проводниками, установлено на один шаг между проводниками большим, чем количество шагов между проводниками профиля 31 обмотки стороны ротора, имеющего шаг Pm между проводниками. Естественно, случай установки шага Pm между проводниками равным 72 град., а шага Ps между проводниками равным 60 град. удовлетворяет формулам (1) и (2). Соответственно, как показано на фиг.8-10, количество повторных колебаний в пилообразной форме детектированного угла Os за период поворота ротора 51 на 360 град. является на один счет большим, чем количество повторных колебаний в пилообразной форме детектированного угла Om:


Затем устройство 61 или 71 управления шкалой находит разность D между детектированными углами Os и Om посредством расчета по следующей формуле (3) на основе детектированных углов Om и Os:

Впоследствии устройство 61 или 71 управления шкалой определяет суждение, является ли значение D, найденное по формуле (3), положительным или отрицательным. Если значение D является отрицательным (D<0), устройство 61 или 71 управления шкалой находит значение E на основании следующего уравнения (4). То есть, значение, полученное прибавлением шага Ps между проводниками к значению D, определено в качестве значения E. Наоборот, если значение D является неотрицательным (D≥0), устройство 61 или 71 управления шкалой находит значение E на основании следующего уравнения (5). Более точно, значение D, найденное по формуле (3), определено в качестве значения E без изменения:


Затем устройство 61 или 71 управления шкалой находит абсолютный угол Z ротора 51 посредством расчета по следующей формуле (6) на основе значения E, установленного посредством использования уравнения (4) или (5), шага Ps между проводниками и детектированного угла Om:

Ниже перечислены примеры расчета абсолютного угла Z, согласно проиллюстрированному примеру.
1. Когда абсолютный угол ротора 51 равен 0 град., оба из детектированных углов Om и Os становятся равными 0 град., значение D становится равным 0, и значение E становится равным 0. Соответственно, рассчитанное значение абсолютного угла Z также становится равным 0 град.
2. Когда абсолютный угол ротора 51 равен 30 град., оба из детектированных углов Om и Os становятся равными 30 град., значение D становится равным 0, и значение E становится равным 0. Соответственно, рассчитанное значение абсолютного угла Z также становится равным 30 град.
3. Когда абсолютный угол ротора 51 равен 60 град., детектированный угол Om становится равным 60 град., детектированный угол Os становится равными 0 град., значение D становится равным -60, и значение E становится равным 0. Соответственно, рассчитанное значение абсолютного угла Z также становится равным 60 град.
4. Когда абсолютный угол ротора 51 равен 65 град., детектированный угол Om становится равным 65 град., детектированный угол Os становится равными 5 град., значение D становится равным -60, и значение E становится равным 0. Соответственно, рассчитанное значение абсолютного угла Z также становится равным 65 град.
5. Когда абсолютный угол ротора 51 равен 72 град., детектированный угол Om становится равным 0 град., детектированный угол Os становится равными 12 град., значение D становится равным 12, и значение E становится равным 12. Соответственно, рассчитанное значение абсолютного угла Z также становится равным 72 град.
6. Когда абсолютный угол ротора 51 равен 90 град., детектированный угол Om становится равным 18 град., детектированный угол Os становится равными 30 град., значение D становится равным 12, и значение E становится равным 12. Соответственно, рассчитанное значение абсолютного угла Z также становится равным 90 град.
7. Когда абсолютный угол ротора 51 равен 120 град., детектированный угол Om становится равным 48 град., детектированный угол Os становится равными 0 град., значение D становится равным -48, и значение E становится равным 12. Соответственно, рассчитанное значение абсолютного угла Z также становится равным 120 град.
8. Когда абсолютный угол ротора 51 равен 130 град., детектированный угол Om становится равным 58 град., детектированный угол Os становится равными 10 град., значение D становится равным -48, и значение E становится равным 12. Соответственно, рассчитанное значение абсолютного угла Z также становится равным 130 град.
9. Когда абсолютный угол ротора 51 равен 144 град., детектированный угол Om становится равным 0 град., детектированный угол Os становится равными 24 град., значение D становится равным 24, и значение E становится равным 24. Соответственно, рассчитанное значение абсолютного угла Z также становится равным 144 град.
10. Когда абсолютный угол ротора 51 равен 150 град., детектированный угол Om становится равным 6 град., детектированный угол Os становится равными 30 град., значение D становится равным 24, и значение E становится равным 24. Соответственно, рассчитанное значение абсолютного угла Z также становится равным 150 град.
Как описано выше, согласно первому варианту осуществления поворотной шкалы абсолютных значений два профиля 31 и 32 обмотки стороны ротора являются ламинированными, и два профиля 33 и 34 обмотки стороны статора также являются ламинированными. Соответственно, в отличие от известного случая предоставления двух профилей обмоток в одной и той же плоскости становится возможным увеличить пространство, занимаемое каждым из профилей 31, 32, 33 и 34 обмоток (длины в радиальном направлении каждого из профилей 31, 32, 33 и 34 обмоток), не увеличивая размера взятой в целом поворотной шкалы абсолютных значений. Как следствие, возможно снижать неблагоприятное воздействие вследствие технологического отклонения поворотной шкалы абсолютных значений, а точность детектирования абсолютного угла ротора 51 в силу этого стабилизируется.
Согласно первому варианту осуществления поворотной шкалы абсолютных значений ротор 51 сформирован размещением двух профилей 31 и 32 обмотки стороны ротора, соответственно, на слоях многослойной печатной платы 53 в виде печатных проводников. При этом статор 41 сформирован размещением двух профилей 33 и 34 обмотки стороны статора, соответственно, на слоях многослойной печатной платы 43 в виде печатных проводников. В результате могут легко достигаться точность профиля и точность позиционирования профилей 31, 32, 33 и 34 обмоток, а ламинированные конструкции профилей 31, 32, 33 и 34 обмоток могут легко реализовываться. Поскольку внутренние провода 44 и 64 также могут быть предусмотрены в виде печатных проводников, традиционные обременительные последовательности операций для подготовки пазов для прокладки проводов в материале основы больше не требуются.
Согласно первому варианту осуществления поворотной шкалы абсолютных значений поворотная шкала абсолютных значений содержит устройство 61 управления шкалой (т.е., источники 62 и 63 переменного тока) для подачи переменных токов в каждый из профилей 33 и 34 обмотки стороны статора для статора 41 в разные моменты времени. Соответственно, даже для конструкции, сформированной ламинированием двух профилей 31 и 32 обмотки стороны ротора и ламинированием двух профилей 33 и 34 обмотки стороны статора, возможно гарантировать точность детектирования абсолютного угла ротора 51 наряду со снижением электромагнитных помех между этими слоями.
В дополнение, согласно первому варианту осуществления поворотной шкалы абсолютных значений поворотная шкала абсолютных значений содержит устройство 71 управления шкалой (т.е. источники 72 и 73 переменного тока) для подачи переменных токов разных частот fm и fs соответственно в профили 33 и 34 обмотки стороны статора у статора 41; и фильтры 74 и 75, предусмотренные соответственно на выходных концах профилей 31 и 32 обмотки стороны ротора у ротора 51, сконфигурированные для среза напряжения, имеющего частоту, отличную от частоты fm или fs исходного наведенного напряжения в каждом из профилей 31 и 32 обмотки стороны ротора. Соответственно, даже в конструкции, сформированной ламинированием двух профилей 31 и 32 обмотки стороны ротора и ламинированием двух профилей 33 и 34 обмотки стороны статора, возможно гарантировать точность детектирования абсолютного угла ротора 51 наряду со снижением электромагнитных помех между этими слоями.
Более того, согласно поворотной шкале абсолютных значений по первому варианту осуществления устройство 71 управления шкалой (т.е. источники 72 и 73 переменного тока) подает переменные токи в каждый из профилей 33 и 34 обмотки стороны статора у статора 41 в разные моменты времени. Соответственно, возможно гарантировать точность детектирования абсолютного угла ротора 51 более достоверно наряду со снижением электромагнитных помех между этими слоями. Если переменные токи подаются в профили 33 и 34 обмотки стороны статора одновременно, электромагнитные помехи могут наблюдаться, например, между трансформаторами 47A и 47B. Однако таких электромагнитных помех можно избежать подачей переменных токов в профили 33 и 34 обмотки стороны статора в разные моменты времени.
Согласно первому варианту осуществления поворотной шкалы абсолютных значений абсолютный угол ротора 51 может рассчитываться легко и достоверно, поскольку соотношение между шагом Pm между проводниками профиля 31 обмотки стороны ротора и шагом Ps между проводниками профиля 32 обмотки стороны ротора установлено, чтобы удовлетворять соотношению Ps=360/((360/Pm)+1), а относительное положение между профилями 31 и 32 обмотки стороны ротора и профилями 33 и 34 обмотки стороны статора установлено из условия, что оба из детектированного угла Om, определенного на основе наведенного напряжения профиля 31 обмотки стороны ротора, и детектированного угла Os, определенного на основе наведенного напряжения профиля 32 обмотки стороны ротора, были равны 0°, когда абсолютный угол ротора 51 равен 0°. Кроме того, поворотная шкала абсолютных значений содержит устройство 61 или 71 управления шкалой, которое рассчитывает абсолютный угол Z ротора 51 следующим образом. Детектированный угол Om определяется на основе наведенного напряжения профиля 31 обмотки стороны ротора, детектированный угол Os определяется на основе наведенного напряжения профиля 32 обмотки стороны ротора, а значение D определяется согласно уравнению D=Os-Om. Впоследствии, значение E определяется по формуле E=D+Ps, когда значение D является отрицательным значением, и значение E определяется по формуле E=D, когда значение D является неотрицательным значением. В заключение, абсолютный угол Z ротора 51 определяется по формуле Z=E×360/Ps+Om.
Кроме того, согласно первому варианту осуществления поворотной шкалы абсолютных значений устройство 61 или 71 управления шкалой корректирует оба из детектированных углов Om и Os, чтобы они были равны 0°, когда абсолютный угол ротора 51 равен 0°, согласно величинам отклонений детектированных углов Om и Os от 0°, полученных в предварительном эксперименте, когда абсолютный угол ротора 51 равен 0°. Соответственно, даже если поворотная шкала абсолютных значений содержит технологическое отклонение, возможно гарантировать точность детектирования абсолютного угла ротора 51.
Второй вариант осуществления
На Фиг.14 показан общий вид профилей обмотки стороны ползуна и профилей обмотки стороны шкалы линейной шкалы абсолютных значений согласно второму варианту осуществления настоящего изобретения.
Линейная шкала абсолютных значений согласно второму варианту осуществления является шкалой абсолютных значений, где используется линейная шкала индуктосинного типа, допускающая детектирование абсолютного значения величины перемещения (абсолютного значения перемещения). Линейная шкала абсолютных значений содержит ползун на скользящей стороне, имеющей профиль 101 обмотки стороны ползуна (второй профиль обмотки стороны ползуна) и еще один профиль 102 обмотки стороны ползуна (первый профиль обмотки стороны ползуна), оба профиля имеют разные шаги между проводниками, которые сложены зигзагообразно и сформированными, в целом, в линейные формы (фиг.14, 15A и 15B), и шкалы на неподвижной стороне, имеющей профиль 103 обмотки стороны шкалы (второй профиль обмотки стороны шкалы) и еще один профиль 34 обмотки стороны шкалы (первый профиль обмотки стороны шкалы), оба профиля имеют разные шаги между проводниками, которые сложены зигзагообразно и сформированы, в целом, в линейные формы (фиг.1, 15С и 15D). Ползун и шкала (фиг.14) расположены так, что обращены друг к другу, при этом профили 101 и 102 обмотки стороны ползуна обращены к профилям 103 и 104 обмотки стороны шкалы.
Два профиля 103 и 104 (Фиг.15А-15D) обмотки стороны шкалы имеют разные шаги Ps [мм] и Pm [мм] (где Ps<Pm) между проводниками, соответственно, и два профиля 101 и 102 обмотки стороны ползуна также имеют разные шаги Ps' [мм] и Pm' [мм] (где Ps'<Pm'), соответственно, соответствующие шагам Ps и Pm между проводниками профилей 103 и 104 обмотки стороны шкалы.
Во втором варианте осуществления два профиля 101 и 102 обмотки стороны ползуна ламинируют, чтобы разместить в разных плоскостях (фиг.14), вместо размещения в одной плоскости, как в известной технологии. Кроме того, два профиля 103 и 104 обмотки стороны шкалы также ламинируют, чтобы разместить в разных плоскостях (фиг.14), вместо размещения в одной плоскости, как в известной технологии.
Конфигурации ползуна и шкалы будут описаны более подробно со ссылками на фиг.16-18.
Ползун 111 (фиг.16A и 16B) линейной шкалы абсолютных значений сформирован фиксацией посредством использования средства фиксации, такого как связующий материал, многослойной печатной платы 113 на поверхности базовой детали 112 для обеспечения прочности. Профиль 101 обмотки стороны ползуна и профиль 102 обмотки стороны шкалы соответственно отпечатаны на первом слое (поверхностном слое) и втором слое (внутреннем слое) многослойной печатной платы 113, и два слоя ламинированы. Внутренние провода 114 также отпечатаны на слоях многослойной печатной платы 113, а профили 101 и 102 обмотки стороны ползуна электрически присоединены к внешним проводам 115 через внутренние провода 114. Внешние провода 115 электрически присоединены к устройству управления шкалой (фиг.19 и 20).
Шкала 121 (фиг.17A и 17B) линейной шкалы абсолютных значений сформирована фиксацией посредством использования средства фиксации, такого как связующий материал, многослойной печатной платы 123 на поверхность базовой детали 122 для обеспечения прочности. Профиль 103 обмотки стороны шкалы и профиль 104 обмотки стороны шкалы соответственно отпечатаны на первом слое (поверхностном слое) и втором слое (внутреннем слое) многослойной печатной платы 123, и два слоя ламинированы. Внутренние провода 124 также отпечатаны на слоях многослойной печатной платы 123, а профили 103 и 104 обмотки стороны шкалы электрически присоединены к внешним проводам 125 через внутренние провода 124. Внешние провода 125 электрически присоединены к устройству управления шкалой (фиг.19 и 20).
Ползун 111 (фиг.18) и шкала 121 обращены друг к другу, при этом профили 101 и 102 обмотки стороны ползуна обращены к профилям 103 и 104 обмотки стороны шкалы. Ползун 111 посажен на вал поступательного движения механического станка или тому подобного и перемещается (скользит) линейно в перпендикулярном направлении к поверхности листа на фиг.18, вместе с валом поступательного движения. Шкала 121 посажена на неподвижную часть механического станка или тому подобного.
Со ссылками на фиг.19 и 20 ниже описаны конфигурации цепей линейной шкалы абсолютных значений.
Как показано на фиг.19, устройство 131 управления шкалой, служащее в качестве средства расчета, а также средства питания, содержит два источника 132 и 133 переменного тока. Источник 132 переменного тока электрически присоединен к профилю 101 обмотки стороны ползуна для ползуна 111 через внешний провод 115 и внутренний провод 114 и предназначен для подачи переменного тока частотой f на профиль 101 обмотки стороны ползуна. Еще один источник 133 переменного тока электрически присоединен к профилю 102 обмотки стороны ползуна у ползуна 111 через внешний провод 115 и внутренний провод 114 и предназначен для подачи переменного тока частотой f на профиль 102 обмотки стороны ползуна. Устройство 131 управления шкалой подает переменные токи в каждый из профилей 101 и 102 обмотки стороны ползуна для ползуна 111 в разные моменты времени. Подача электроэнергии из источника 132 переменного тока в профиль 101 обмотки стороны ползуна и подача электроэнергии из источника 133 переменного тока в профиль 102 обмотки стороны ползуна выполняются не одновременно, а со сдвигом во времени.
Входной конец схемы 135 усилителя электрически присоединен к профилю 103 обмотки стороны шкалы у шкалы 121 через внутренний провод 124, а входной конец схемы 136 усилителя электрически присоединен к профилю 104 обмотки стороны шкалы у шкалы 121 через внутренний провод 124. Схемы 135 и 136 усилителей предусмотрены в многослойной печатной плате 123 шкалы 121. Выходные концы схем 135 и 136 усилителей электрически присоединены к устройству 131 управления шкалой через внешние провода 125.
Соответственно, в случае конфигурации цепей на фиг.19, когда переменный ток частотой f подается из источника 132 переменного тока в профиль 101 обмотки стороны ползуна у ползуна 111, наведенное напряжение (напряжение частотой f) формируется на профиле 103 обмотки стороны шкалы. Наведенное напряжение изменяется периодически (где период = одному шагу Ps между проводниками профиля 103 обмотки стороны шкалы) в зависимости от величины линейного перемещения ползуна 111 (профиля 101 обмотки стороны ползуна), т.е. с изменением уровня индуктивной связи, соответствующим изменению позиционной корреляции между профилем 101 обмотки стороны ползуна и профилем 103 обмотки стороны шкалы. После этого, наведенное напряжение (напряжение частотой f) усиливается схемой 135 усилителя, а затем вводится в устройство 131 управления шкалой.
С другой стороны, когда переменный ток частотой f подается из источника 133 переменного тока в профиль 102 обмотки стороны ползуна у ползуна 111, наведенное напряжение (напряжение частотой f) формируется на профиле 104 обмотки стороны шкалы. Наведенное напряжение изменяется периодически (где период = одному шагу Pm между проводниками профиля 104 обмотки стороны шкалы) в зависимости от величины линейного перемещения ползуна 111 (профиля 102 обмотки стороны ползуна), то есть с изменением уровня индуктивной связи, соответствующим изменению позиционной корреляции между профилем 102 обмотки стороны ползуна и профилем 104 обмотки стороны шкалы. После этого, наведенное напряжение усиливается схемой 136 усилителя, а затем вводится в устройство 131 управления шкалой. Устройство 131 управления шкалой рассчитывает абсолютное значение величины линейного перемещения (абсолютную величину перемещения) ползуна 111 (такого как вал поступательного движения механического станка или тому подобного, присоединенный к ползуну 111) на основании наведенных напряжений, введенных из схем 135 и 136 усилителей, как будет подробно описано ниже.
Ниже описана конфигурация цепей (фиг.20). Устройство 141 управления шкалой, служащее в качестве средства расчета, а также средства питания, содержит два источника 142 и 143 переменного тока. Источник 142 переменного тока электрически присоединен к профилю 101 обмотки стороны ползуна у ползуна 111 через внешний провод 115 и внутренний провод 114 и предназначен для подачи переменного тока частотой fs на профиль 101 обмотки стороны ползуна. Еще один источник 143 переменного тока электрически присоединен к профилю 102 обмотки стороны ползуна у ползуна 111 через внешний провод 115 и внутренний провод 114 и предназначен для подачи переменного тока частотой fm на профиль 102 обмотки стороны ползуна. Устройство 141 управления шкалой подает переменные токи, с разными частотами fm и fs, соответственно, в профили 101 и 102 обмотки стороны ползуна для ползуна 111. Устройство 141 управления шкалой подает переменные токи в каждый из профилей 101 и 102 обмотки стороны ползуна для ползуна 111 с разными временными привязками. Подача электроэнергии из блока 142 питания переменного тока в профиль 101 обмотки стороны ползуна и подача электроэнергии из переменного тока 143 в профиль 102 обмотки стороны ползуна выполняются не одновременно, а со сдвигом во времени.
Входной конец фильтра 144 электрически присоединен к профилю 103 обмотки стороны шкалы у шкалы 121 через внутренний провод 124, а входной конец фильтра 145 электрически присоединен к профилю 104 обмотки стороны шкалы у шкалы 121 через внутренний провод 124. Фильтры 144 и 145 предусмотрены в многослойной печатной плате 123 шкалы 121. Фильтр 144 срезает напряжение частотой fm, тогда как другой фильтр 145 срезает напряжение частотой fs.
Входной конец схемы 135 усилителя электрически присоединен к выходному концу фильтра 144 через внутренний провод 124, а входной конец схемы 136 усилителя электрически присоединен к выходному концу фильтра 145 через внутренний провод 124. Схемы 135 и 136 усилителей предусмотрены в многослойной печатной плате 123 шкалы 121. Выходные концы схем 135 и 136 усилителей электрически присоединены к устройству 141 управления шкалой через внешние провода 125.
Соответственно, в случае конфигурации цепей на фиг.20, когда переменный ток частотой fs подается из источника 142 переменного тока в профиль 101 обмотки стороны ползуна для ползуна 111, наведенное напряжение (напряжение частотой fs) формируется на профиле 103 обмотки стороны шкалы. Наведенное напряжение изменяется периодически (где период = одному шагу Ps между проводниками профиля 103 обмотки стороны шкалы) в зависимости от величины линейного перемещения ползуна 111 (профиля 101 обмотки стороны ползуна), т.е. с изменением уровня индуктивной связи, соответствующим изменению позиционной корреляции между профилем 101 обмотки стороны ползуна и профилем 103 обмотки стороны шкалы. Это наведенное напряжение передается на схему 135 усилителя через фильтр 144. Фильтр 144 предназначен для среза напряжения, имеющего частоту fm, т.е. для среза напряжения, имеющего частоту, отличную от частоты fs исходного наведенного напряжения в профиле 103 обмотки стороны шкалы. Соответственно, исходное наведенное напряжение, имеющее частоту fs, которое сформировано посредством индуктивной связи между профилем 101 обмотки стороны ползуна и профилем 103 обмотки стороны шкалы, не срезается, а пропускается через фильтр 144 для передачи на схему 135 усилителя. После этого, наведенное напряжение, переданное на схему 135 усилителя, усиливается схемой 135 усилителя, а затем вводится в устройство 141 управления шкалой.
С другой стороны, когда переменный ток частотой fm подается из источника 143 переменного тока в профиль 102 обмотки стороны ползуна у ползуна 111, наведенное напряжение (напряжение частотой fm) формируется на профиле 104 обмотки стороны шкалы. Наведенное напряжение изменяется периодически (где период = одному шагу Pm между проводниками профиля 104 обмотки стороны шкалы) в зависимости от величины линейного перемещения ползуна 111 (профиля 102 обмотки стороны ползуна), т.е. с изменением уровня индуктивной связи, соответствующим изменению позиционной корреляции между профилем 102 обмотки стороны ползуна и профилем 104 обмотки стороны шкалы. Это наведенное напряжение передается на схему 136 усилителя через фильтр 145. Фильтр 145 сконфигурирован для среза напряжения, имеющего частоту fs, т.е. для среза напряжения, имеющего частоту, отличную от частоты fm исходного наведенного напряжения в профиле 104 обмотки стороны шкалы. Соответственно, исходное наведенное напряжение, имеющее частоту fm, которое сформировано посредством индуктивной связи между профилем 102 обмотки стороны ползуна и профилем 104 обмотки стороны шкалы, не срезается, а пропускается через фильтр 145 для передачи на схему 136 усилителя. После этого, наведенное напряжение, переданное на схему 136 усилителя, усиливается схемой 136 усилителя, а затем вводится в устройство 141 управления шкалой. Устройство 141 управления шкалой рассчитывает абсолютное значение величины линейного перемещения (абсолютную величину перемещения) ползуна 111 (такого как вал поступательного движения механического станка или тому подобного, присоединенный к ползуну 111) на основании наведенных напряжений, введенных из схем 135 и 136 усилителей, как будет подробно описано ниже.
Далее, последовательности операций для расчета абсолютной величины перемещения посредством использования устройства 131 или 141 управления шкалой будут описаны со ссылкой на фиг.21-26. Последовательности операций для расчета абсолютной величины перемещения являются одинаковыми для устройств 131 и 141 управления шкалой. Отметим, что значения Om, Os, D, E и Z, рассчитываемые в последовательности операций расчета, проиллюстрированы на фиг.21. Для того чтобы ясно проиллюстрировать варианты значений Om, Os, D, E и Z, эти значения проиллюстрированы по отдельности на фиг.22-26.
На Фиг.21-26 показан пример, где детектированная величина перемещения L полной линейной шкалы абсолютных значений установлена в 360 [мм], шаг Pm между проводниками профиля 104 обмотки стороны шкалы установлен в 72 [мм], а шаг Ps между проводниками профиля 103 обмотки стороны шкалы установлен в 60 [мм]. Поперечная ось соответствует абсолютной величине линейного перемещения (абсолютной величине перемещения) ползуна 111, а продольная ось соответствует значениям Om, Os, D, E и Z относительно абсолютной величины линейного перемещения (абсолютной величины перемещения).
На фиг.21-26 значение Om, показанное сплошной линией, является величиной перемещения ползуна 111, детектированной профилем 104 обмотки стороны шкалы, имеющим шаг Pm между проводниками, а значение Os, показанное пунктирной линией, является величиной перемещения ползуна 111, детектированной профилем 103 обмотки стороны шкалы, имеющим шаг Ps между проводниками. Более точно, устройство 131 или 141 управления шкалой, во-первых, находит детектированную величину перемещения Om на основании наведенного напряжения профиля 104 обмотки стороны шкалы, а затем находит детектированный угол Os на основании наведенного напряжения профиля 103 обмотки стороны шкалы. Поскольку в описанном примере шаг Pm между проводниками установлен в 72 [мм], детектированная величина перемещения Om изменяется итеративно с периодом в 72 [мм] и имеет пилообразную форму (как показано). Поскольку шаг Ps между проводниками установлен в 60 [мм], детектированная величина перемещения Os изменяется итеративно с периодом в 60 [мм] и имеет пилообразную форму (как показано).
Относительное положение между профилями 101 и 102 (фиг.21-23) обмотки стороны ползуна и профилями 103 и 104 обмотки стороны шкалы установлено из условия, чтобы обе из детектированных величин перемещения Om и Os были равны 0 [мм], когда положение (абсолютная величина перемещения) ползуна 111 равно 0 [мм]. Однако возможен вариант, когда детектированные величины перемещения Om и Os не равны 0 [мм], когда положение (абсолютная величина перемещения) ползуна 111 равна 0 [мм], и некоторое отклонение формируется в детектированных величинах перемещения Om и Os. Такое отклонение обусловлено, например, из-за отклонения от заданной позиции ползуна 111 относительно шкалы 121, т.е. из-за технологического отклонения линейной шкалы абсолютных значений. Соответственно, величины отклонений (величина смещения) для детектированных величин перемещения Om и Os получают заранее на основе эксперимента и вводят в устройство 131 или 141 управления шкалой. Затем, согласно величинам отклонений (величине смещения), устройство 131 или 141 управления шкалой корректирует полученные величины перемещений Om и Os, выведенные из наведенных напряжений. Более точно, устройство 131 или 141 управления шкалой вносит поправку (смещение), чтобы скорректировать обе из детектированных величин перемещения Om и Os, чтобы они были равны 0 [мм], когда величина линейного перемещения (абсолютная величина перемещения) ползуна 111 равна 0 [мм], путем добавления, либо вычитания величин отклонений (величины смещения) к или из детектированных величин перемещения Om и Os, выведенных из наведенных напряжений.
Соотношение между шагом Pm между проводниками и шагом Ps между проводниками должно удовлетворять следующим формулам (7) и (8). Формула (8) является модифицированной формой уравнения (7). Как упомянуто выше, значение L в формулах (7) и (8) является детектированной величиной перемещения полной линейной шкалы абсолютных значений, которая установлена в 360 [мм] в данном примере. Более точно, в детектированной величине перемещения L полной линейной шкалы абсолютных значений (которая равна 360 [мм]) количество шагов между проводниками профиля 103 обмотки стороны шкалы, имеющего шаг Ps между проводниками, установлено на один шаг между проводниками больше, чем количество шагов между проводниками профиля 104 обмотки стороны шкалы, имеющего шаг Pm между проводниками. Естественно, случай установки шага Pm между проводниками равным 72 [мм], а шага Ps между проводниками равным 60 [мм] удовлетворяет формулам (7) и (8). Соответственно, как может быть показано на фиг.21-23, количество повторных колебаний в пилообразной форме детектированной величины перемещения Os за период скользящего движения ползуна 111 на 360 [мм] является на единицу больше, чем количество повторных колебаний в пилообразной форме детектированной величины перемещения Om:


Затем устройство 131 или 141 управления шкалой находит разность D между детектированной величиной перемещения Os и детектированной величиной перемещения Om посредством расчета по следующей формуле (9) на основе детектированных величин перемещений Om и Os:

Впоследствии, устройство 131 или 141 управления шкалой определяет, является ли значение D, определенное по формуле (9), положительным или отрицательным. Если значение D является отрицательным (D<0), устройство 131 или 141 управления шкалой находит значение E на основании следующего уравнения (10). То есть, значение, полученное прибавлением шага Ps между проводниками к значению D, определено в качестве значения E. Наоборот, если значение D является неотрицательным (D≥0), устройство 131 или 141 управления шкалой находит значение E на основании следующего уравнения (11). Более точно, значение D, найденное по формуле (9), определено в качестве значения E без изменения:


Затем устройство 131 или 141 управления шкалой определяет абсолютную величину перемещения Z ползуна 111 посредством расчета по формуле (12) на основе значения E, установленного на основании формулы (10) или (11), шага Ps между проводниками и детектированной величины перемещения Om. Значение L в формуле (12) также представляет детектированную величину перемещения полной линейной шкалы абсолютных значений, как описано ранее, которая установлена равной 360 [мм] в описываемом примере.

Ниже приведены примеры расчета абсолютной величины перемещения Z согласно проиллюстрированному примеру.
(1) Когда положение (абсолютная величина перемещения) ползуна 111 равно 0 [мм], обе детектированных величины перемещения Om и Os равны 0 [мм], значение D равно 0 и значение E равно 0. Соответственно, рассчитанное значение абсолютной величины перемещения Z также равно 0 [мм].
(2) Когда положение (абсолютная величина перемещения) ползуна 111 равно 30 [мм], обе детектированных величины перемещения Om и Os равны 30 [мм], значение D равно 0 и значение E равно 0. Соответственно, рассчитанное значение абсолютной величины перемещения Z также равно 30 [мм].
(3) Когда положение (абсолютная величина перемещения) ползуна 111 равно 60 [мм], детектированная величина перемещения Om равна 60 [мм], детектированная величина перемещения Os равна 0 [мм], значение D равно -60 и значение E равно 0. Соответственно, рассчитанное значение абсолютной величины перемещения Z равно 60 [мм].
(4) Когда положение (абсолютная величина перемещения) ползуна 111 равна 65 [мм], детектированная величина перемещения Om равна 65 [мм], детектированная величина перемещения Os равна 5 [мм], значение D становится равно -60 и значение E равно 0. Соответственно, рассчитанное значение абсолютной величины перемещения Z также равно 65 [мм].
(5) Когда положение (абсолютная величина перемещения) ползуна 111 равно 72 [мм], детектированная величина перемещения Om равна 0 [мм], детектированная величина перемещения Os равна 12 [мм], значение D равно 12 и значение E равно 12. Соответственно, рассчитанное значение абсолютной величины перемещения Z также равно 72 [мм].
(6) Когда положение (абсолютная величина перемещения) ползуна 111 равно 90 [мм], детектированная величина перемещения Om равна 18 [мм], детектированная величина перемещения Os равна 30 [мм], значение D равно 12 и значение E равно 12. Соответственно, рассчитанное значение абсолютной величины перемещения Z также равно 90 [мм].
(7) Когда положение (абсолютная величина перемещения) ползуна 111 равно 120 [мм], детектированная величина перемещения Om равна 48 [мм], детектированная величина перемещения Os равна 0 [мм], значение D равно -48 и значение E равно 12. Соответственно, рассчитанное значение абсолютной величины перемещения Z также равно 120 [мм].
(8) Когда положение (абсолютная величина перемещения) ползуна 111 равно 130 [мм], детектированная величина перемещения Om равна 58 [мм], детектированная величина перемещения Os равна 10 [мм], значение D равно -48 и значение E равно 12. Соответственно, рассчитанное значение абсолютной величины перемещения Z также равно 130 [мм].
(9) Когда положение (абсолютная величина перемещения) ползуна 111 равно 144 [мм], детектированная величина перемещения Om равна 0 [мм], детектированная величина перемещения Os равна 24 [мм], значение D становится равным 24 и значение E равно 24. Соответственно, рассчитанное значение абсолютной величины перемещения Z также равно 144 [мм].
(10) Когда положение (абсолютная величина перемещения) ползуна 111 равно 150 [мм], детектированная величина перемещения Om равна 6 [мм], детектированная величина перемещения Os равна 30 [мм], значение D равно 24 и значение E становится равным 24. Соответственно, рассчитанное значение абсолютной величины перемещения Z также равно 150 [мм].
Как описано выше, согласно линейной шкале абсолютных значений по второму варианту осуществления два профиля 101 и 102 обмотки стороны ползуна являются ламинированными и два профиля 103 и 104 обмотки стороны шкалы также являются ламинированными. Соответственно, в отличие от известного случая предоставления двух профилей обмоток в одной и той же плоскости возможно увеличивать пространство, занимаемое каждым из профилей 101, 102, 103 и 104 обмоток (длины в радиальном направлении соответственных профилей 101, 102, 103 и 104 обмоток), не увеличивая размера взятой в целом линейной шкалы абсолютных значений. Как следствие, возможно снижать неблагоприятное воздействие из-за технологического отклонения линейной шкалы абсолютных значений, а точность детектирования абсолютной величины перемещения ползуна 111 в силу этого стабилизируется.
В дополнение, согласно линейной шкале абсолютных значений по второму варианту осуществления ползун 111 сформирован предоставлением двух профилей 101 и 102 обмотки стороны ползуна, соответственно, на слоях многослойной печатной платы 113 в виде печатных проводников. При этом шкала 121 сформирована предоставлением двух профилей 103 и 104 обмотки стороны шкалы на слоях многослойной печатной платы 43 в виде печатных проводников. Благодаря этому возможно легко достигать точности профилирования и точности позиционирования профилей 101, 102, 103 и 104 обмоток и в силу этого легко реализовывать ламинированные конструкции профилей 101, 102, 103 и 104 обмоток. Кроме того, поскольку внутренние провода 114 и 124 также могут быть легко предусмотрены в виде печатных проводников, традиционные обременительные последовательности операций для подготовки пазов для прокладки проводов в материале основы больше не требуются.
Дополнительно, согласно линейной шкале абсолютных значений по второму варианту осуществления линейная шкала абсолютных значений содержит устройство 131 управления шкалой (т.е. источники 132 и 133 переменного тока) для подачи переменных токов в каждый из профилей 101 и 102 обмотки стороны ползуна для ползуна 111 в разные моменты времени. Соответственно, даже с конструкцией, сформированной ламинированием двух профилей 101 и 102 обмотки стороны ползуна и ламинированием двух профилей 103 и 104 обмотки стороны шкалы, возможно гарантировать точность детектирования абсолютной величины перемещения ползуна 111 наряду со снижением электромагнитных помех между этими слоями.
Более того, согласно линейной шкале абсолютных значений по второму варианту осуществления линейная шкала абсолютных значений содержит: устройство 141 управления шкалой (источники 142 и 143 переменного тока), предназначенное для подачи переменных токов, имеющих разные частоты fm и fs, в профили 101 и 102 обмотки стороны ползуна для ползуна 111; и фильтры 144 и 145, предусмотренные соответственно на выходных концах профилей 103 и 104 обмотки стороны шкалы у шкалы 121, для среза напряжения, имеющего частоту, отличную от частоты fm или fs исходного наведенного напряжения в каждом из профилей 103 и 104 обмотки стороны шкалы для шкалы 102. Соответственно, для конструкции, сформированной ламинированием двух профилей 101 и 102 обмотки стороны ползуна и ламинированием двух профилей 103 и 104 обмотки стороны шкалы, возможно гарантировать точность детектирования абсолютной величины перемещения ползуна 111 наряду со снижением электромагнитных помех между этими слоями.
Более того, согласно линейной шкале абсолютных значений по второму варианту осуществления устройство 141 управления шкалой (источники 142 и 143 переменного тока) подает переменные токи в каждый из профилей 101 и 102 обмотки стороны ползуна у ползуна 111 в разные моменты времени привязками. Благодаря этому возможно гарантировать точность детектирования абсолютной величины перемещения ползуна 111 более достоверно наряду со снижением электромагнитных помех между этими слоями.
В дополнение, согласно линейной шкале абсолютных значений по второму варианту осуществления абсолютная величина перемещения ползуна 111 может рассчитываться легко и достоверно, поскольку соотношение между шагом Pm между проводниками профиля 104 обмотки стороны шкалы и шагом Ps между проводниками профиля 103 обмотки стороны шкалы установлено, чтобы удовлетворять условию Ps=L/((L/Pm)+1), где L - детектированная величина перемещения полной линейной шкалы абсолютных значений, при этом относительное положение между профилями 101 и 102 обмотки стороны ползуна и профилями 103 и 104 обмотки стороны шкалы установлены из условия, что обе из детектированной величины перемещения Om, определенной на основе наведенного напряжения профиля 104 обмотки стороны шкалы, и детектированной величины перемещения Os, определенной основе наведенного напряжения профиля 103 обмотки стороны шкалы, были равны 0 мм, когда абсолютная величина перемещения ползуна 111 равна 0 мм. Более того, линейная шкала абсолютных значений содержит устройство 131 или 141 управления шкалой, которое рассчитывает абсолютную величину перемещения Z ползуна 111 следующим образом. Детектированная величина перемещения Om определяется на основе наведенного напряжения профиля 104 обмотки стороны шкалы, детектированная величина перемещения Os определяется на основе наведенного напряжения профиля 103 обмотки стороны шкалы, а значение D определяется по формуле D=Os-Om. Впоследствии, значение E определяется по формуле E=D+Ps, когда значение D является отрицательным значением, и значение E определяется по формуле E=D, когда значение D является неотрицательным значением. В заключение, абсолютная величина перемещения Z ползуна 111 определяется по формуле Z=E×L/Ps+Om.
Согласно линейной шкале абсолютных значений по второму варианту осуществления устройство 131 или 141 управления шкалой корректирует обе из детектированных величин перемещения Om и Os, чтобы они были равны 0 мм, когда абсолютная величина перемещения ползуна 111 равна 0 мм, согласно величинам отклонений детектированных величин перемещения Om и Os от 0 мм, полученных в предварительном эксперименте, когда абсолютная величина перемещения ползуна 111 равна 0 мм. Соответственно, даже если линейная шкала абсолютных значений содержит технологическое отклонение, возможно гарантировать точность детектирования абсолютной величины перемещения ползуна 111.
Хотя в первом и втором вариантах осуществления описаны ламинированные конструкции и конфигурации цепей в случае ламинирования двух профилей обмотки, имеющих разные шаги между проводниками, настоящее изобретение не ограничено этой конфигурацией. Вышеописанные ламинированная конструкция и конфигурация цепей также применимы к случаю, когда поворотная шкала абсолютных значений или линейная шкала абсолютных значений содержит три или более профилей обмоток, имеющих разные шаги между проводниками.
Более того, способ расчета абсолютного значения, как описано в первом или втором варианте осуществления, не ограничен поворотной шкалой абсолютных значений или линейной шкалой абсолютных значений, которые сформированы ламинированием двух профилей обмоток, имеющих разные шаги между проводниками, как описано выше. Способ также применим к поворотной шкале абсолютных значений или линейной шкале абсолютных значений, включающей в себя два профиля обмотки, имеющие разные шаги между проводниками, которые размещены в одной плоскости.
Настоящее изобретение относится к шкале абсолютных значений индуктосинного типа и способу расчета абсолютного значения и применимо для случаев реализации шкалы абсолютных значений, допускающей подавление неблагоприятного воздействия из-за технологического отклонения по точности детектирования шкалы абсолютных значений и в силу этого получение стабильной точности детектирования, и реализации шкалы абсолютных значений, допускающей легкий и достоверный расчет абсолютного значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктивный абсолютный преобразователь угловых перемещений | 2021 |
|
RU2788423C2 |
| СПОСОБ И ПРИБОР ДЛЯ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ АБСОЛЮТНОГО ПОЛОЖЕНИЯ И УСТРОЙСТВО, СНАБЖЕННОЕ ДАННЫМ ПРИБОРОМ | 2006 |
|
RU2432549C2 |
| Емкостной абсолютный преобразователь угловых перемещений | 2019 |
|
RU2724150C1 |
| Емкостной абсолютный преобразователь угловых перемещений | 2021 |
|
RU2773267C1 |
| БЕСКОНТАКТНЫЙ ПРОГРАММИРУЕМЫЙ ДАТЧИК АБСОЛЮТНОГО УГЛОВОГО ПОЛОЖЕНИЯ В 360° | 2006 |
|
RU2312363C1 |
| Датчик перемещений - индуктокор | 1976 |
|
SU817739A1 |
| КОМБИНИРОВАННЫЙ ПОЗИЦИОНИРУЮЩИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ ЭЛЕКТРОМАГНИТНО-ИНДУКЦИОННОГО ТИПА | 2020 |
|
RU2759209C1 |
| Многофазный многополюсныйВРАщАющийСя ТРАНСфОРМАТОР | 1979 |
|
SU813607A1 |
| Колесный узел со встроенным генератором | 2017 |
|
RU2676009C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АБСОЛЮТНОГО СКОЛЬЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2004 |
|
RU2271013C1 |
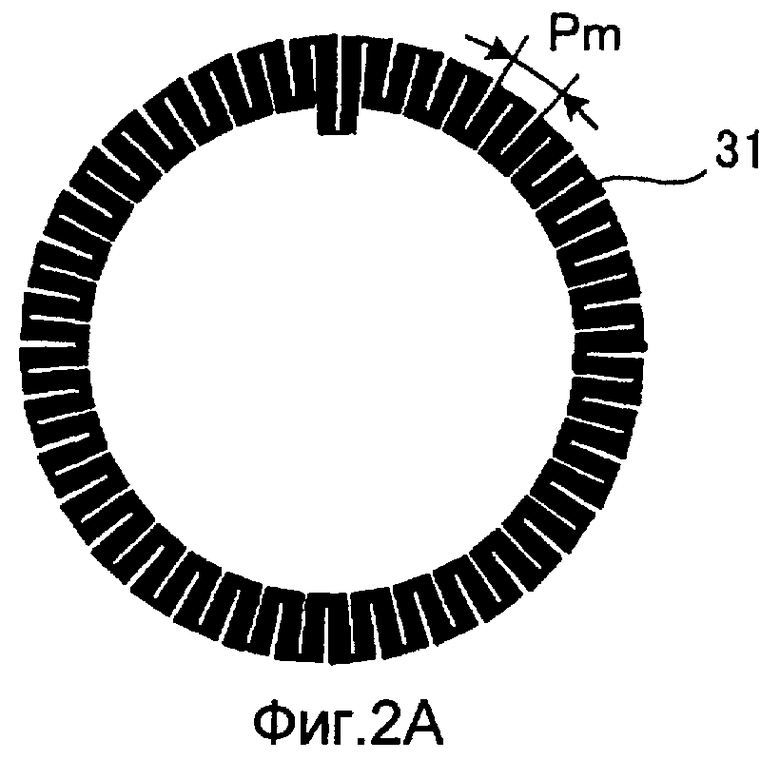
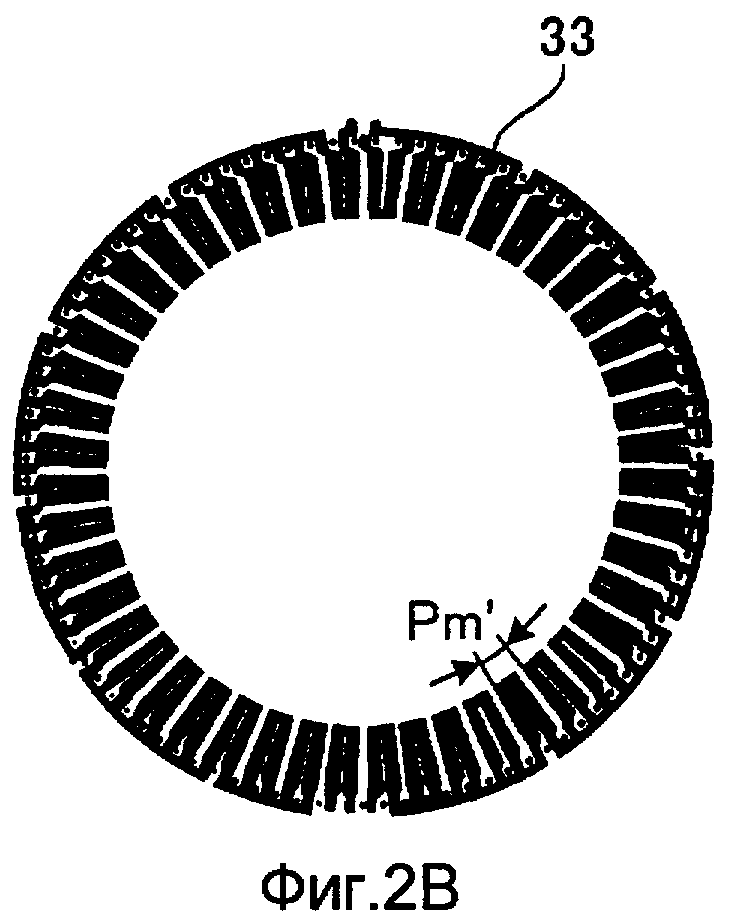
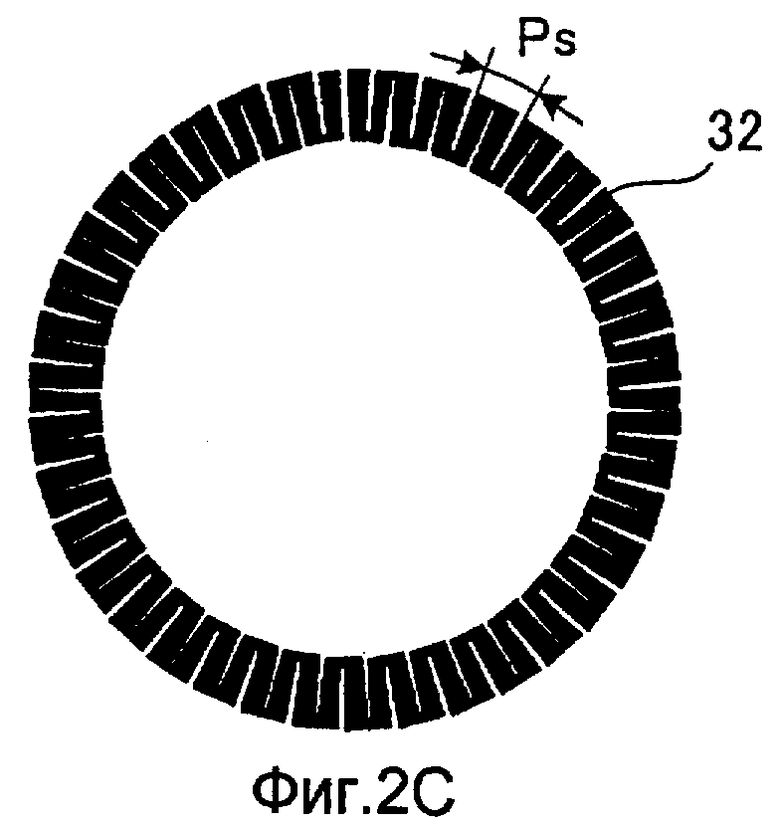

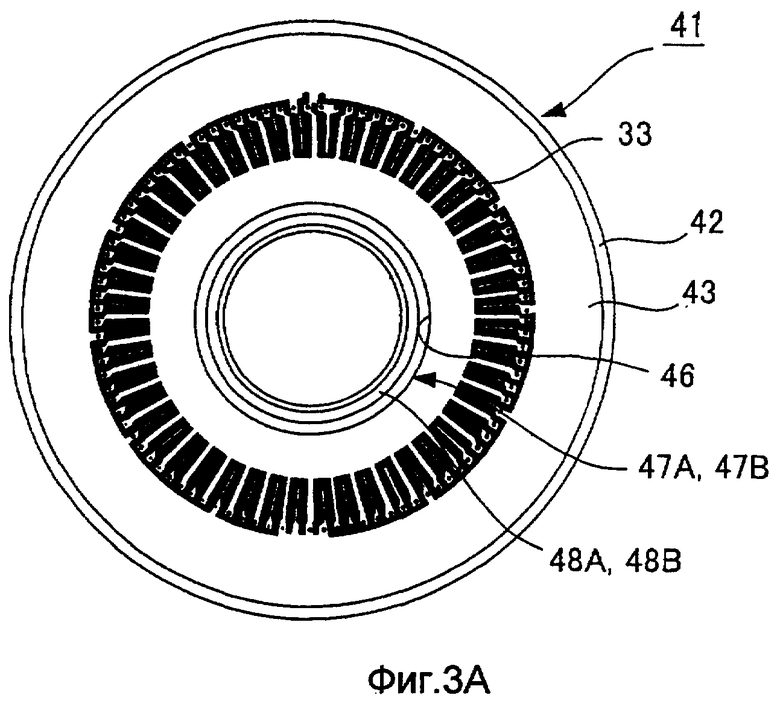

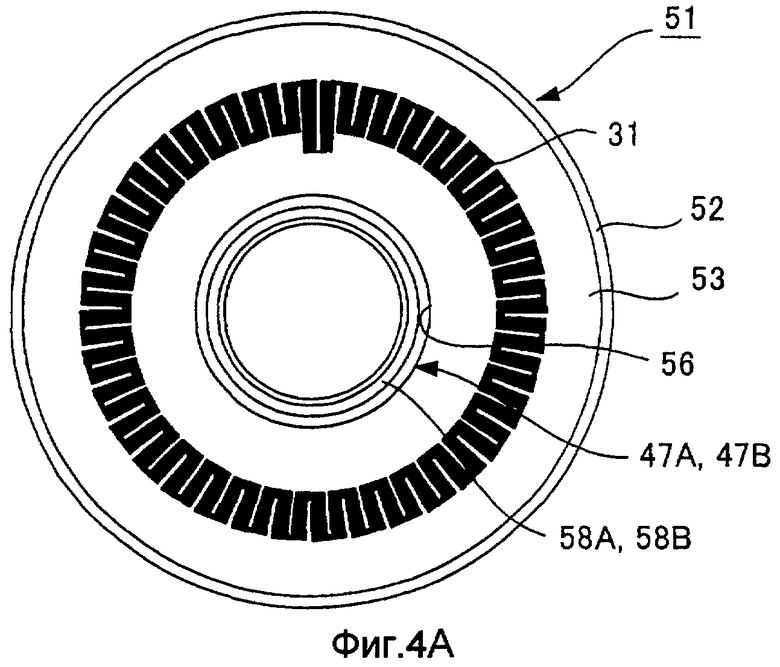
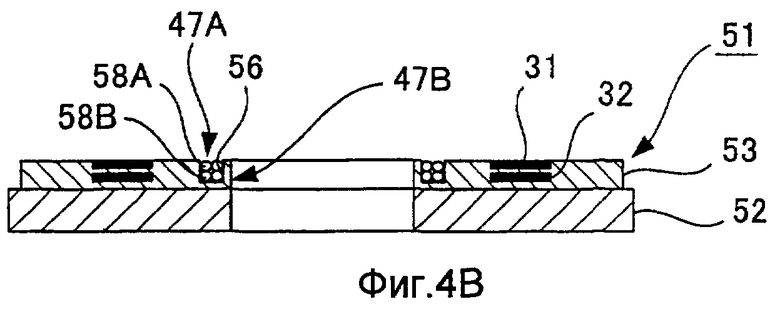
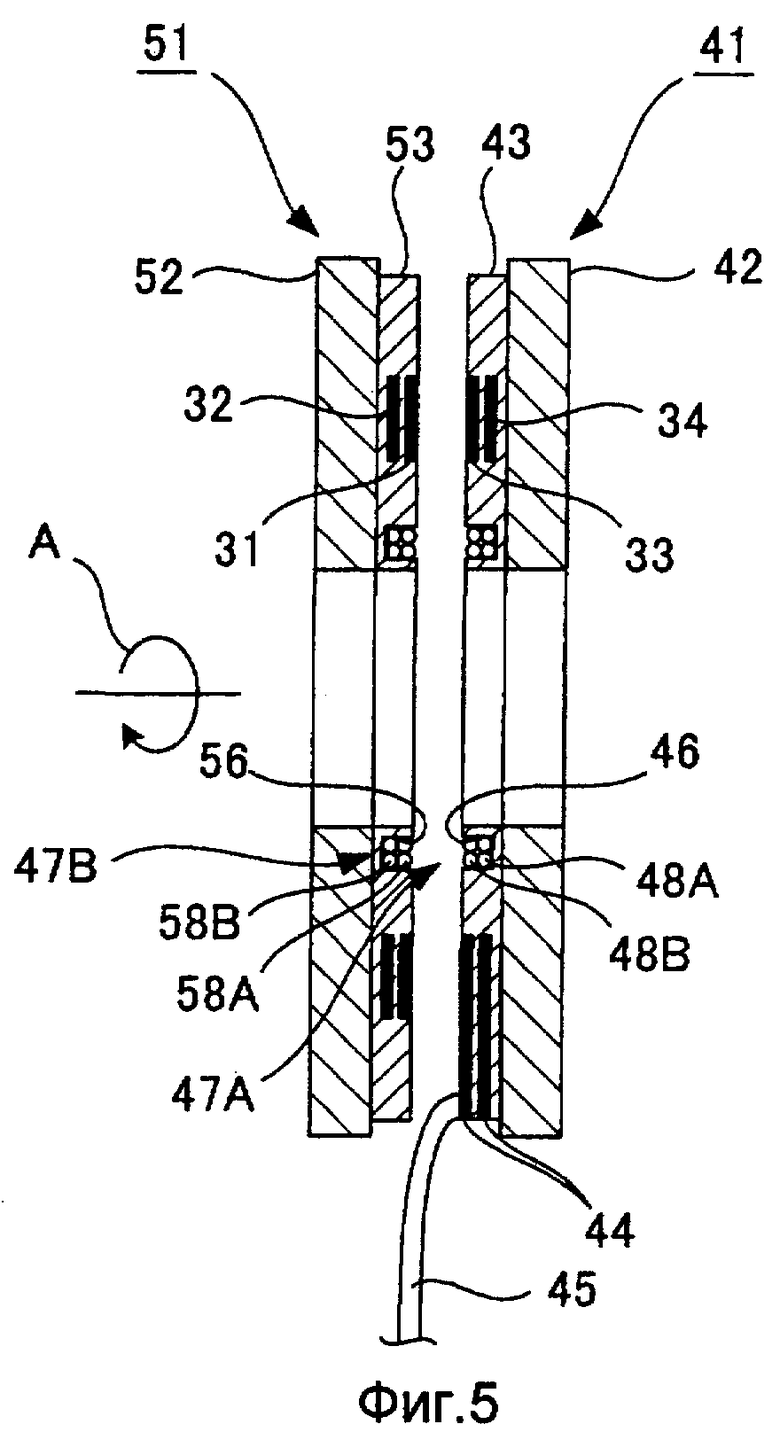
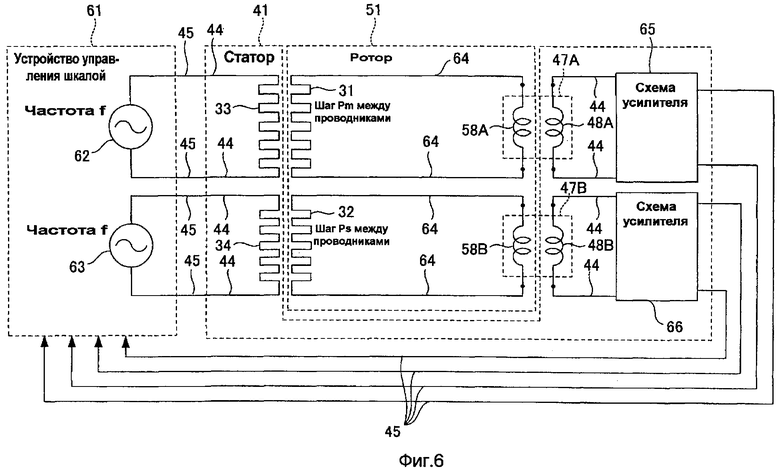
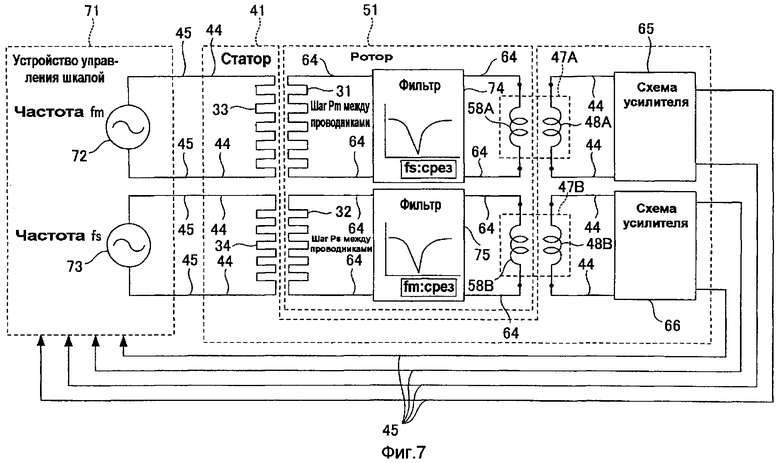

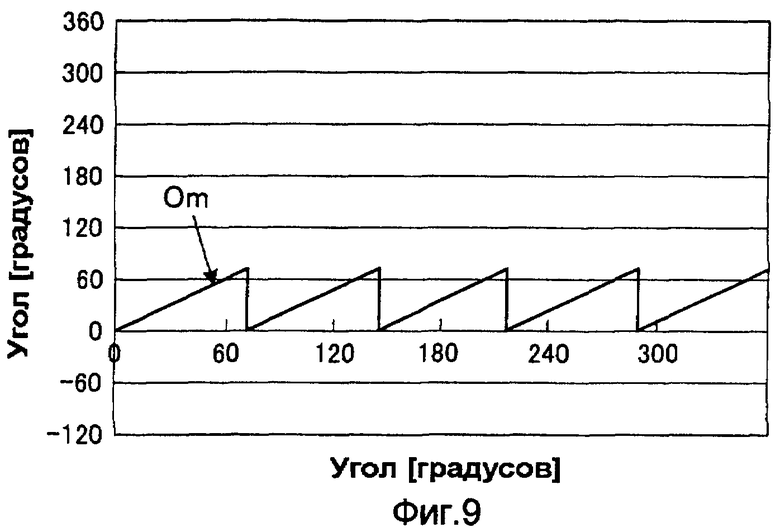
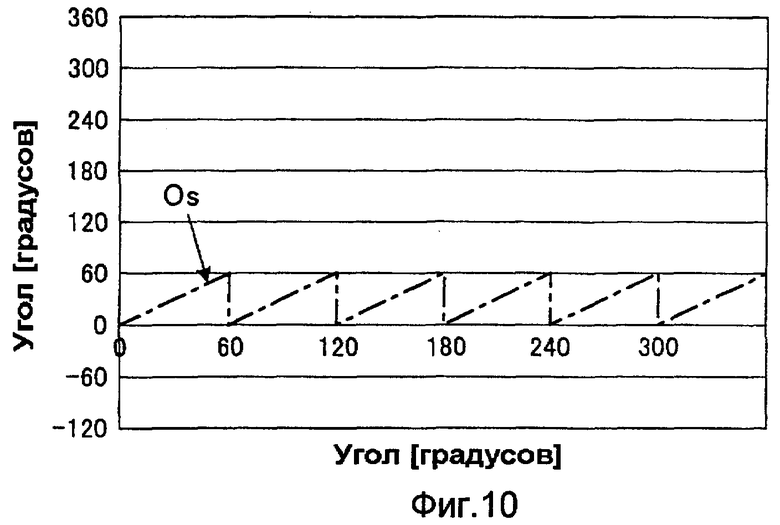
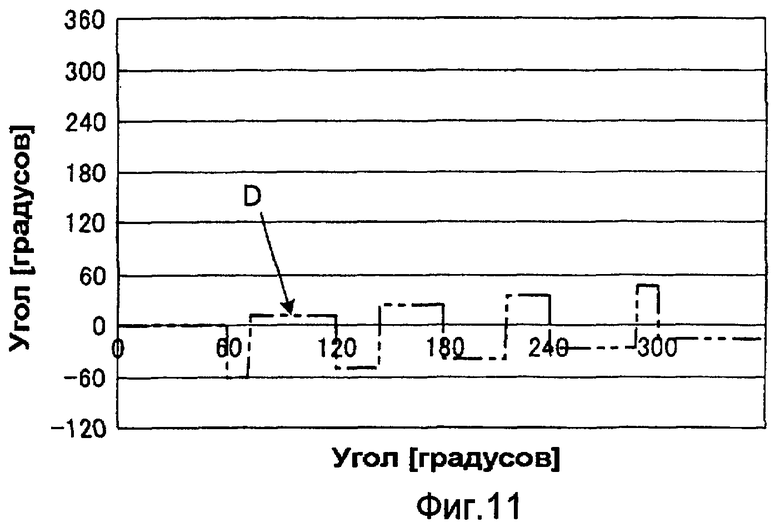
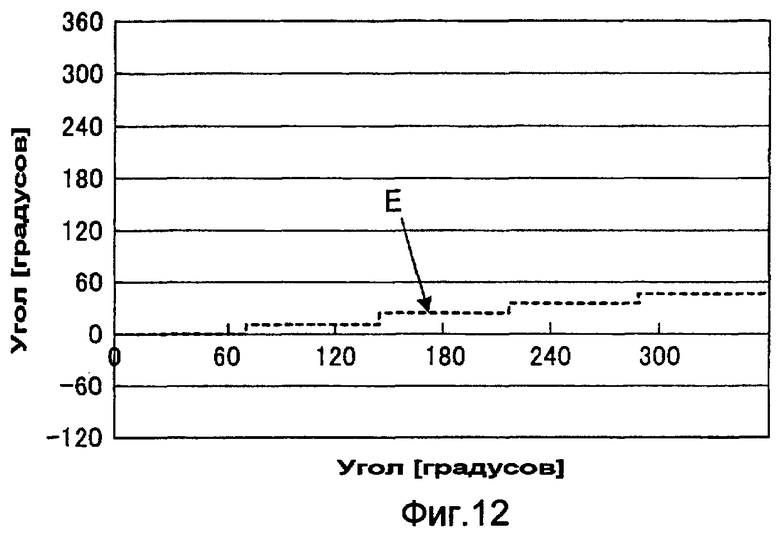
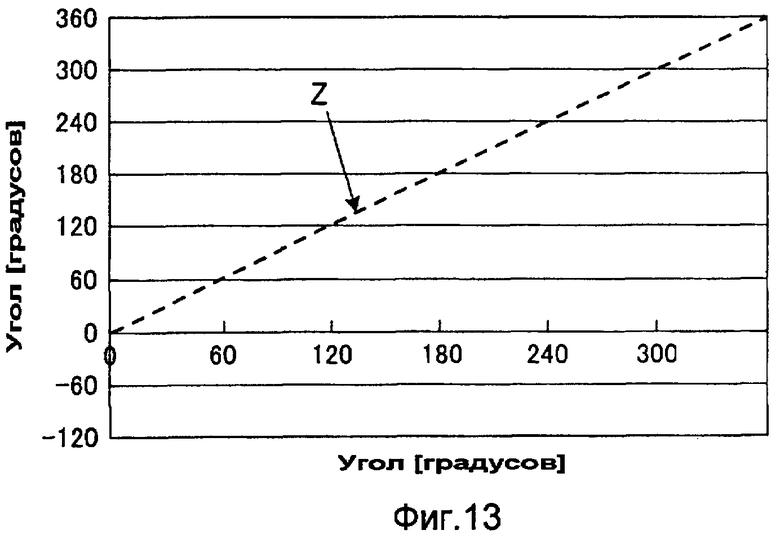
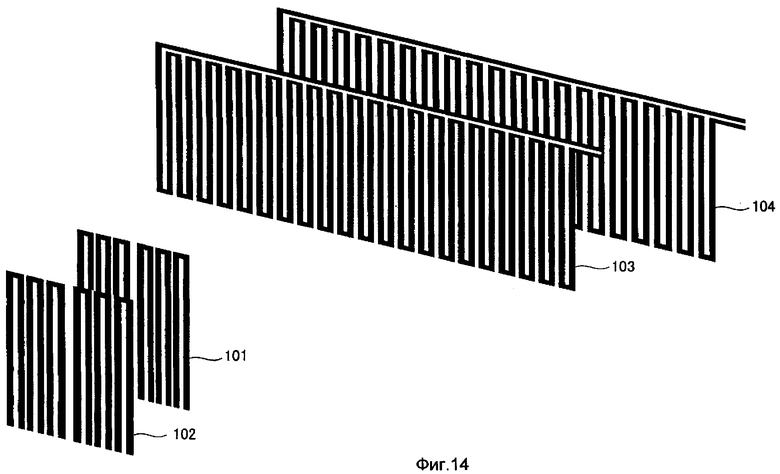

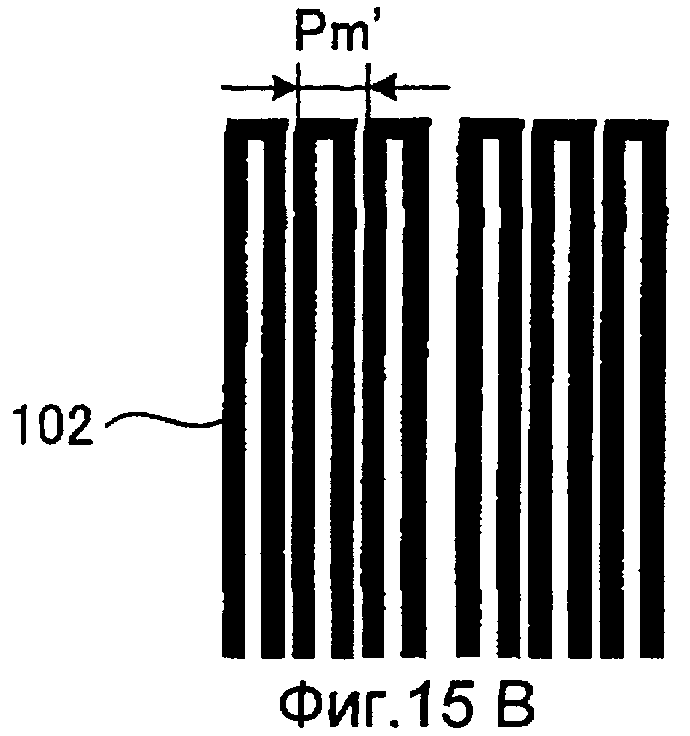
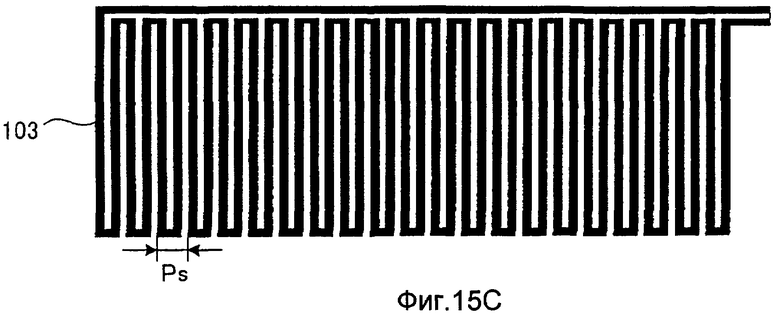
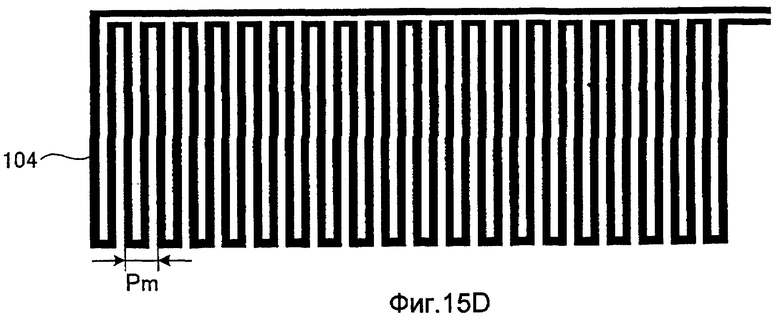

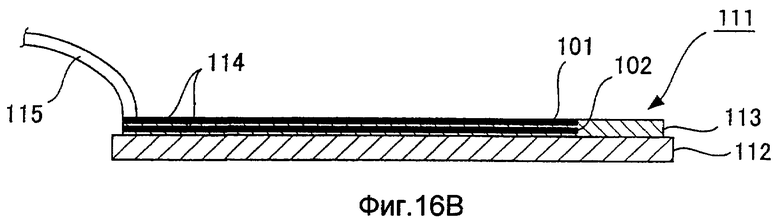
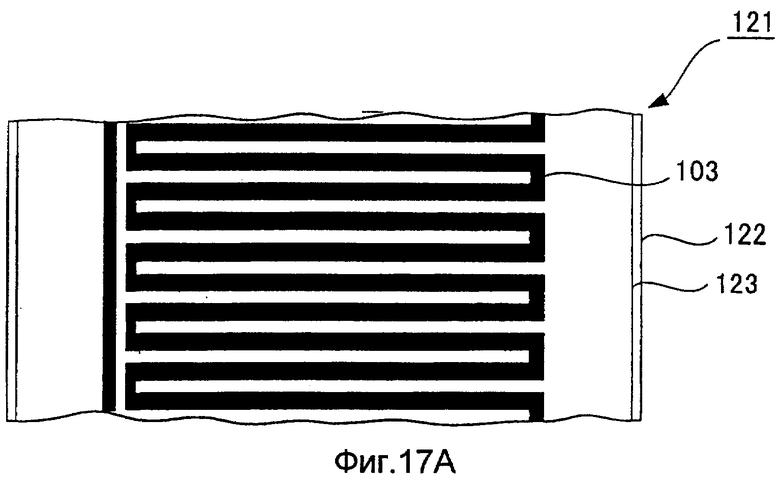

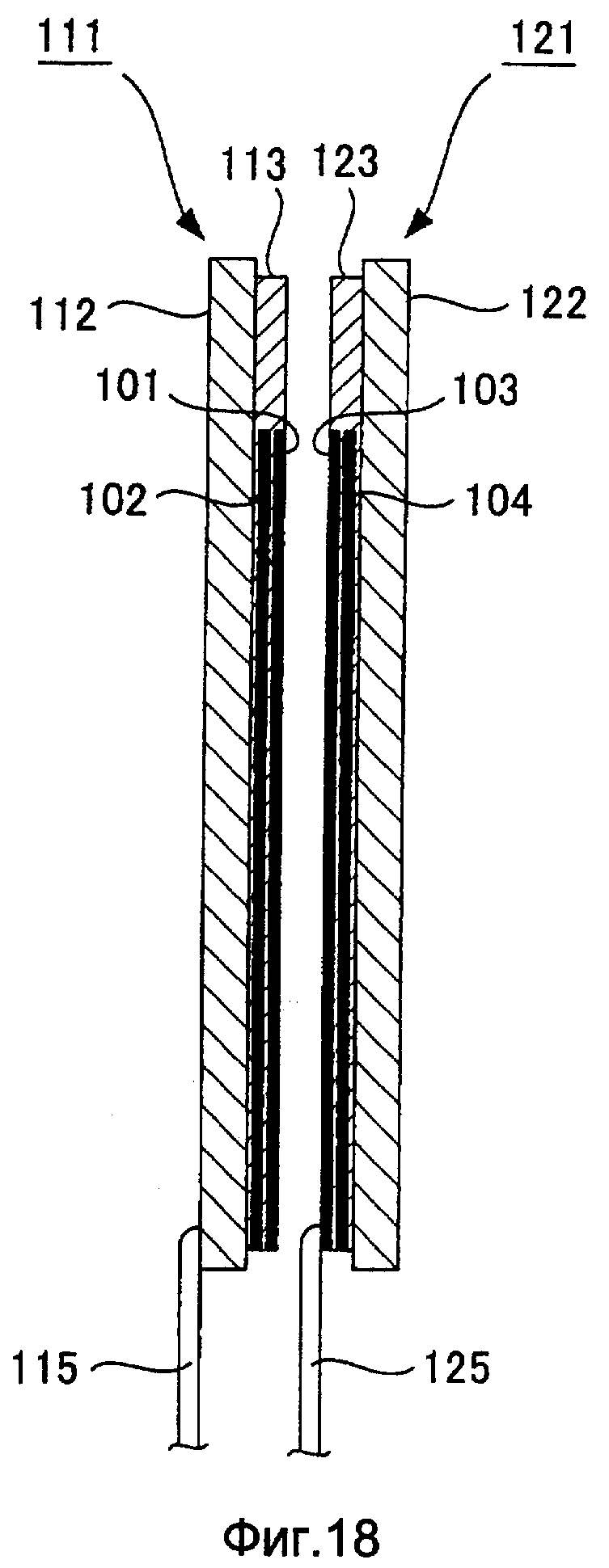
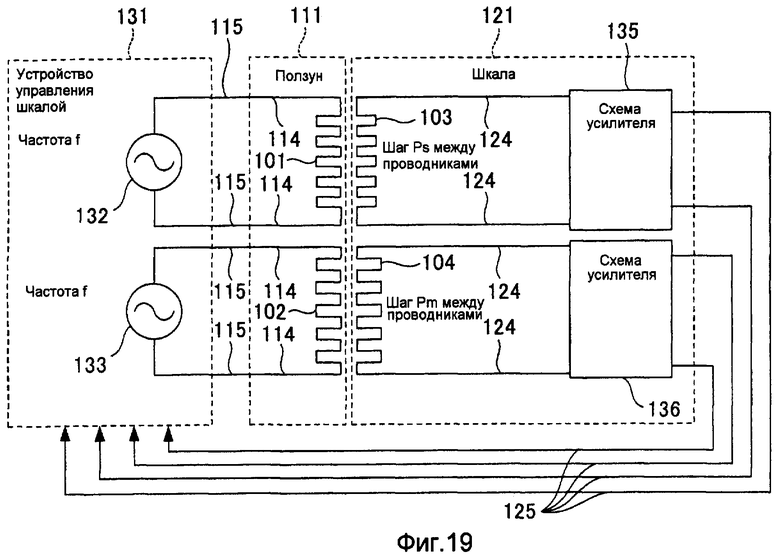

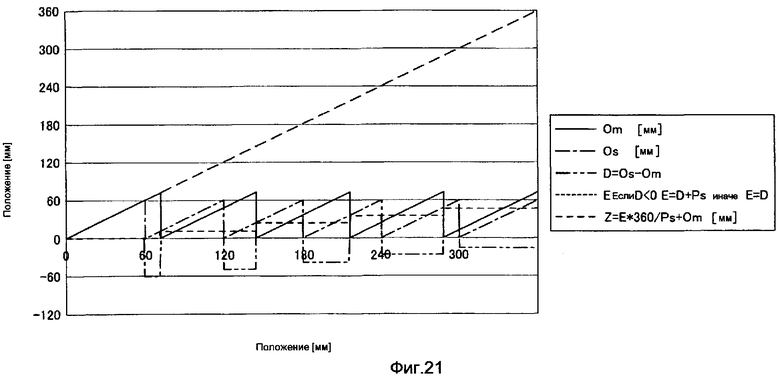
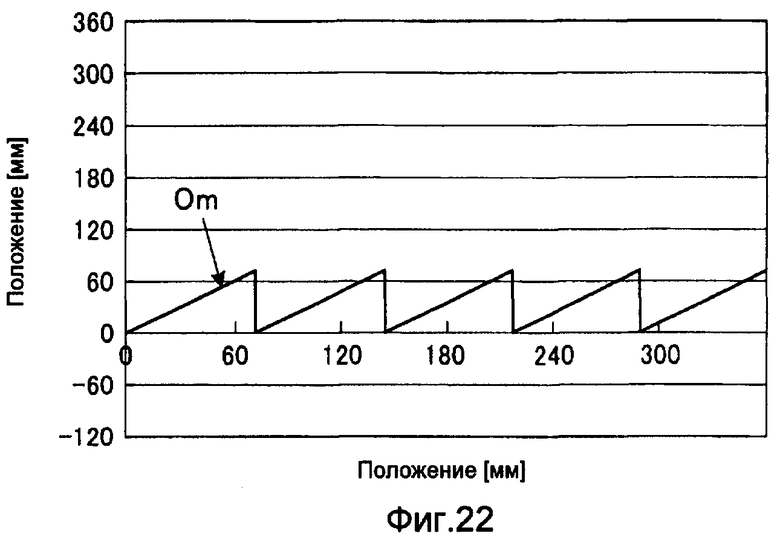
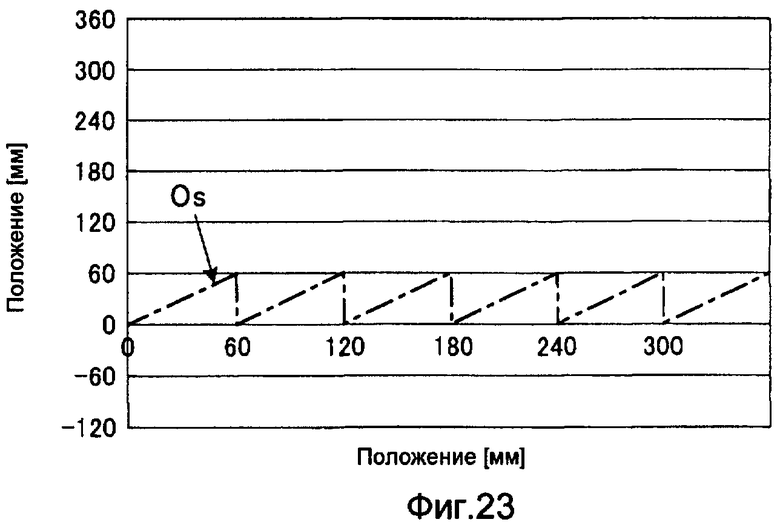

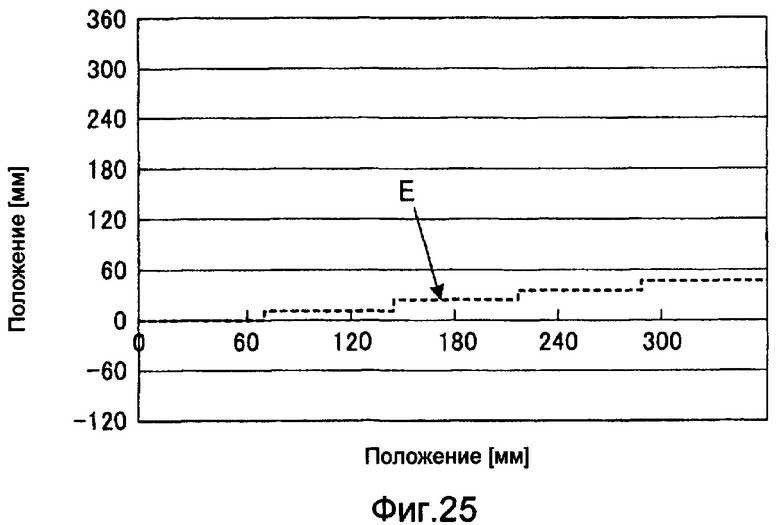
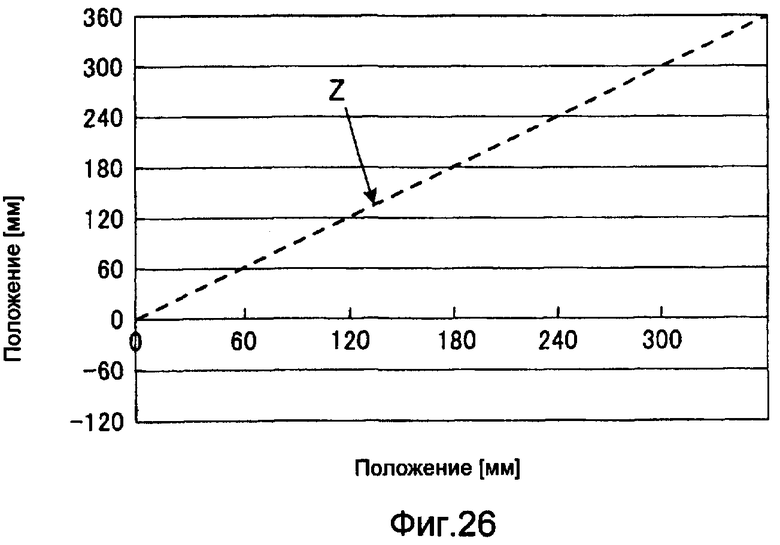

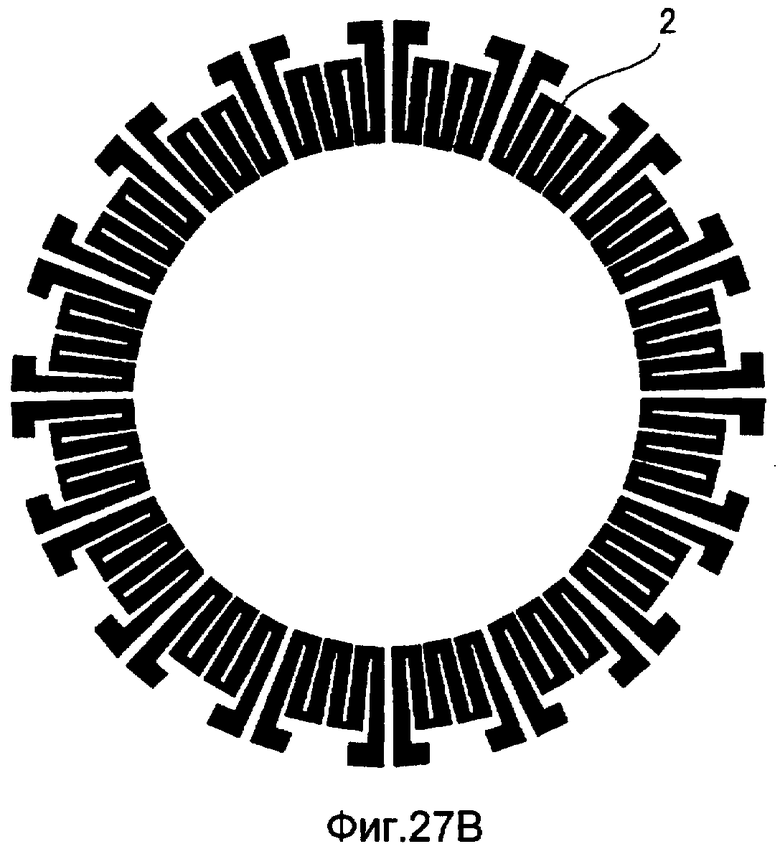
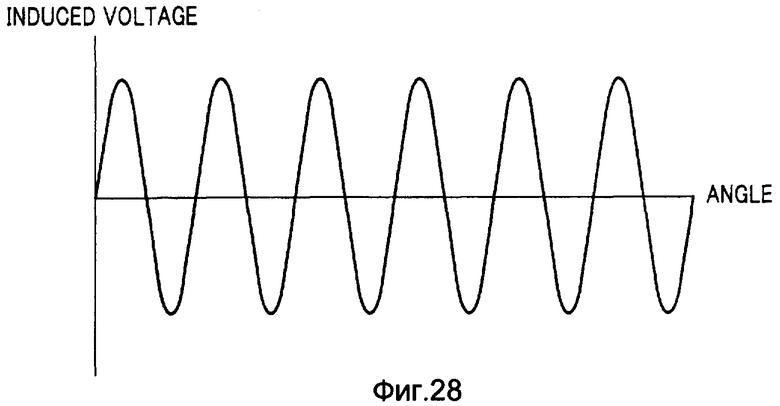

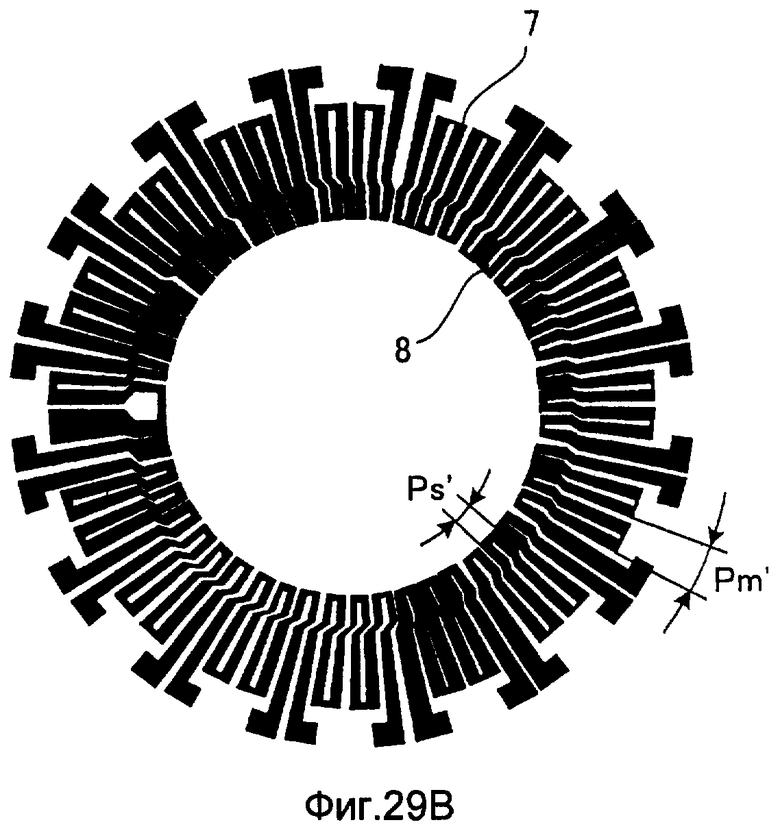

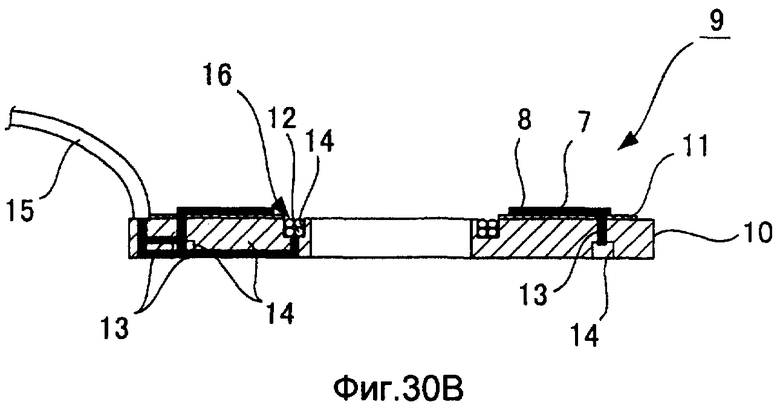
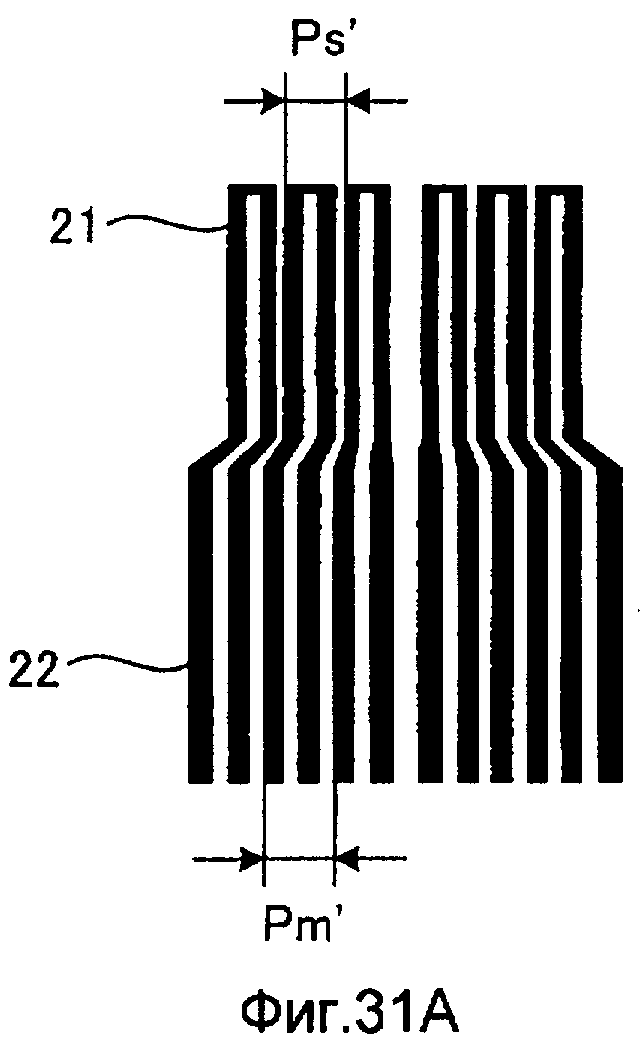
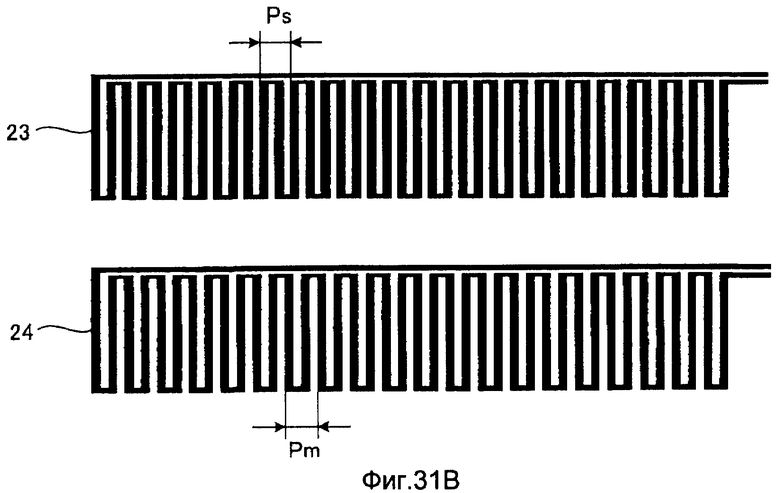
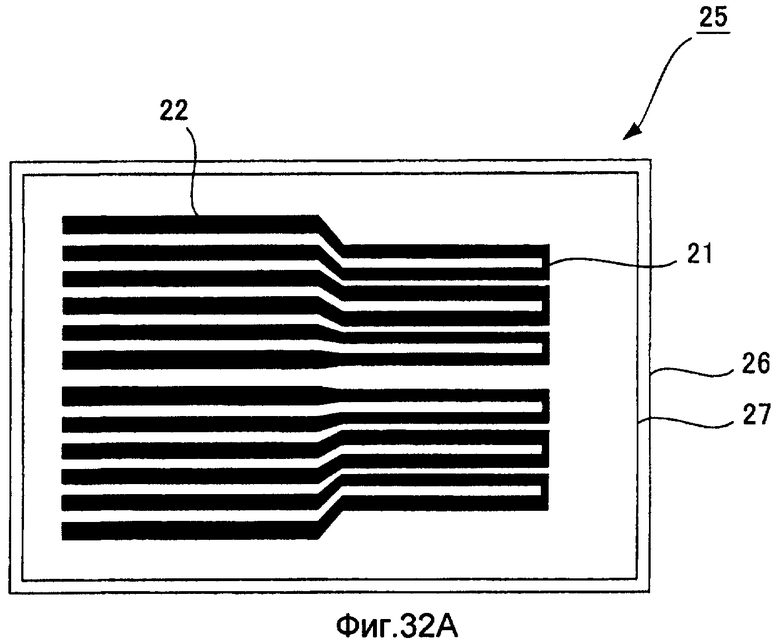

Изобретение относится к индуктосинному преобразователю угловых или линейных перемещений и способу определения абсолютных значений перемещений. Устройство содержит ротор или ползун, в котором два профиля обмотки стороны ротора или ползуна имеют разные шаги между проводниками и являются ламинированными, и статор, в котором два профиля обмотки стороны статора имеют разные шаги между проводниками и также являются ламинированными. Изобретение обеспечивает подавление неблагоприятного воздействия из-за технологического отклонения по точности детектирования абсолютных значений угловых и линейных перемещений. 3 н. и 7 з.п. ф-лы, 47 ил.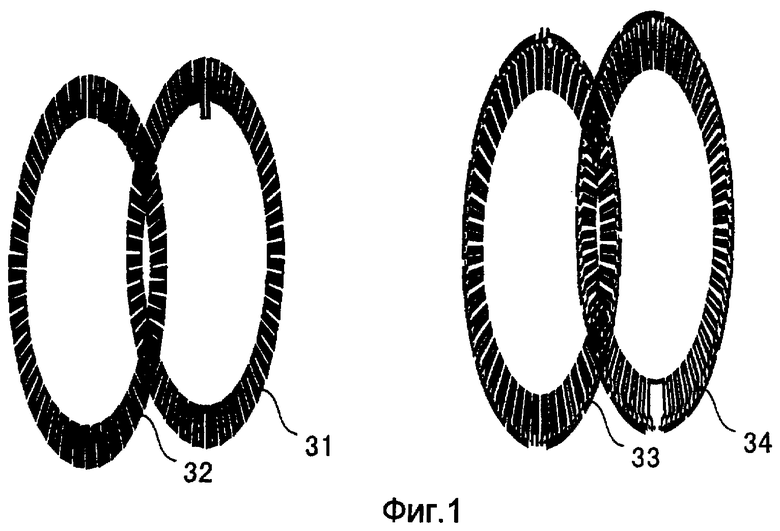
1. Устройство индуктосинного типа для определения значений величины линейного или углового перемещения, в котором в случае, когда устройство индуктосинного типа содержит ротор и используется для определения значений величины углового перемещения, оно содержит статор, содержащий множество профилей обмотки стороны статора, имеющий разный шаг между проводниками, ротор, содержащий множество профилей обмотки стороны ротора, имеющий разный шаг между проводниками, при этом статор и ротор расположены так, что обращены друг к другу, при этом множество профилей обмотки стороны статора и множество профилей обмотки стороны ротора обращены один к другому; множество профилей обмотки стороны статора являются ламинированными друг на друга, и множество профилей обмотки стороны ротора являются ламинированными друг на друга, а в случае, когда устройство индуктосинного типа содержит ползун и используется для определения значений величины линейного перемещения, оно содержит ползун, содержащий множество профилей обмотки стороны ползуна, имеющий разный шаг между проводниками, статор, содержащий множество профилей обмотки стороны статора, имеющий разный шаг между проводниками, при этом ползун и статор расположены так, что обращены друг к другу, при этом множество профилей обмотки стороны статора и множество профилей обмотки стороны ползуна обращены один к другому; множество профилей обмотки стороны ползуна являются ламинированными друг на друга, и множество профилей обмотки стороны статора являются ламинированными друг на друга.
2. Устройство по п.1, отличающееся тем, что в случае, когда устройство индуктосинного типа содержит ротор и используется для определения значений величины углового перемещения, оно дополнительно содержит средство питания для подачи переменных токов в профили обмотки стороны статора в соответствующие разные моменты времени, а в случае, когда устройство индуктосинного типа содержит ползун и используется для определения значений величины линейного перемещения, оно дополнительно содержит средство питания для подачи переменных токов в профили обмотки стороны ползуна в соответствующие разные моменты времени.
3. Устройство по п.1, отличающееся тем, что в случае, когда устройство индуктосинного типа содержит ротор и используется для определения значений величины углового перемещения, оно дополнительно содержит средство питания для подачи переменных токов, имеющих разные частоты, в соответствующие профили обмотки стороны статора, и фильтр, размещенный на выходном конце каждого из профилей обмотки стороны ротора и предназначенный для среза напряжения, имеющего частоту, отличную от частоты исходного наведенного напряжения в каждом профиле обмотки стороны ротора, а в случае, когда устройство индуктосинного типа содержит ползун и используется для определения значений величины линейного перемещения, оно дополнительно содержит средство питания для подачи переменных токов, имеющих разные частоты, в соответственные профили обмотки стороны ползуна, и фильтр, размещенный на выходном конце каждого из профилей обмотки стороны статора и предназначенный для среза напряжения, имеющего частоту, отличную от частоты исходного наведенного напряжения в каждом профиле обмотки стороны статора.
4. Устройство по п.3, отличающееся тем, что в случае, когда устройство индуктосинного типа содержит ротор и используется для определения значений величины углового перемещения, средство питания обеспечивает подачу переменных токов в профили обмотки стороны статора для статора в соответствующие разные моменты времени, а в случае, когда устройство индуктосинного типа содержит ползун и используется для определения значений величины линейного перемещения, средство питания обеспечивает подачу переменных токов в профили обмотки стороны ползуна для ползуна в соответствующие разные моменты времени.
5. Устройство по любому из пп.1-4, отличающееся тем, что в случае, когда устройство индуктосинного типа содержит ротор и используется для определения значений величины углового перемещения, оно дополнительно содержит средство определения значений углового перемещения, при этом ротор содержит первый профиль обмотки стороны ротора и второй профиль обмотки стороны ротора, которые имеют разный шаг между проводниками, статор содержит первый профиль обмотки стороны статора и второй профиль обмотки стороны статора, каждый из профилей имеет разный шаг между проводниками, соотношение между шагом Pm между проводниками первого профиля обмотки стороны ротора и шагом Ps между проводниками второго профиля обмотки стороны ротора удовлетворяет соотношению Ps=360/((360/Pm)+1), относительное положение первого и второго профилей обмотки стороны ротора и первого и второго профилей обмотки стороны статора установлено так, что оба из детектированного угла Om и детектированного угла Os равны 0°, когда абсолютный угол ротора равен 0°, при этом детектированный угол Оm определен на основе наведенного напряжения первого профиля обмотки стороны ротора, а детектированный угол Os определен на основе наведенного напряжения второго профиля обмотки стороны ротора, при этом средство определения значений углового перемещения предназначено для определения абсолютного угла Z ротора согласно уравнению Z=E·360/Ps+Om так, что детектированный угол Om определяется на основе наведенного напряжения первого профиля обмотки стороны ротора; детектированный угол Os определяется на основе наведенного напряжения второго профиля обмотки стороны ротора; значение D определяется согласно уравнению D=Os-Om; значение Е определяется согласно уравнению E=D+Ps, когда значение D является отрицательным значением; значение Е определяется согласно уравнению E=D, когда значение D является неотрицательным значением,
в случае, когда устройство индуктосинного типа содержит ползун и используется для определения значений величины линейного перемещения, оно дополнительно содержит средство определения значений линейного перемещения, при этом ползун содержит первый профиль обмотки стороны ползуна и второй профиль обмотки стороны ползуна, которые имеют разные шаги между проводниками, статор содержит первый профиль обмотки стороны статора и второй профиль обмотки стороны статора, каждый из профилей имеет разный шаг между проводниками, соотношение между шагом Pm между проводниками первого профиля обмотки стороны статора и шагом Ps между проводниками второго профиля обмотки стороны статора удовлетворяет соотношению Ps=L/((L/Pm)+1), где L - детектированная величина общего перемещения, относительное положение между первым и вторым профилями обмотки стороны ползуна и первым и вторым профилями обмотки стороны статора установлено из условия, что обе из детектированной величины перемещения Om и детектированной величины перемещения Os равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, при этом детектированная величина перемещения Om находится на основе наведенного напряжения первого профиля обмотки стороны статора, а детектированная величина перемещения Os находится на основе наведенного напряжения второго профиля обмотки стороны статора, при этом средство определения значений линейного перемещения предназначено для определения абсолютной величины перемещения Z ползуна согласно уравнению Z=E·L/Ps+Om так, что детектированная величина перемещения Om определяется на основании наведенного напряжения первого профиля обмотки стороны статора; детектированная величина перемещения Os определяется на основании наведенного напряжения второго профиля обмотки стороны статора; значение D определяется на основании формулы D=Os-Om; значение Е определяется согласно уравнению E=D+Ps, когда значение D является отрицательным значением; значение Е определяется согласно уравнению E=D, когда значение D является неотрицательным значением.
6. Устройство по п.5, отличающееся тем, что
в случае, когда устройство индуктосинного типа содержит ротор и используется для определения значений величины углового перемещения, средство определения значений углового перемещения обеспечивает коррекцию обоих из детектированных углов Om и Os, чтобы было равно 0°, когда абсолютный угол ротора равен 0°, согласно величинам отклонений детектированных углов Om и Os от 0°, причем детектированные углы получены предварительным экспериментом, когда абсолютный угол ротора равен 0°,
в случае, когда устройство индуктосинного типа содержит ползун и используется для определения значений величины линейного перемещения, средство определения значений линейного перемещения обеспечивает коррекцию обоих из детектированных величин перемещения Om и Os, чтобы были равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, согласно величинам отклонений детектированных величин перемещений Om и Os от 0 мм, причем детектированные величины получены предварительным экспериментом, когда абсолютная величина перемещения ползуна равна 0 мм.
7. Устройство индуктосинного типа для определения значений величины линейного или углового перемещения, в котором
в случае, когда устройство индуктосинного типа содержит ротор и используется для определения значений величины углового перемещения, оно содержит статор, содержащий первый профиль обмотки стороны статора, и второй профиль обмотки стороны статора, имеющие разный шаг между проводниками, ротор, содержащий первый профиль обмотки стороны ротора, и второй профиль обмотки стороны ротора, имеющие разный шаг между проводниками, при этом статор и ротор расположены так, что обращены друг к другу, при этом первый и второй профили обмотки стороны статора и первый и второй профили обмотки стороны ротора обращены один к другому; средство определения значений величины углового перемещения, при этом соотношение между шагом Pm между проводниками первого профиля обмотки стороны ротора и шагом Ps между проводниками второго профиля обмотки стороны ротора удовлетворяет соотношению Ps=360/((360/Pm)+1), относительное положение между первым и вторым профилями обмотки стороны ротора и первым и вторым профилями обмотки стороны статора установлено так, что оба из детектированного угла Om и детектированного угла Os были равны 0°, когда абсолютный угол ротора равен 0°, при этом детектированный угол Om определяется на основе наведенного напряжения первого профиля обмотки стороны ротора, а детектированный угол Os определяется на основе наведенного напряжения второго профиля обмотки стороны ротора, причем указанное средство определения значений величины углового перемещения предназначено для определения абсолютного утла Z ротора согласно формуле Z=E·360/Ps+Om так, что детектированный угол Om определяется на основе наведенного напряжения первого профиля обмотки стороны ротора; детектированный угол Os определяется на основе наведенного напряжения второго профиля обмотки стороны ротора; значение D определяется по формуле D=Os-Om; значение Е определяется по формуле E=D+Ps, когда значение D является отрицательным значением; и значение Е определяется по формуле E=D, когда значение D является неотрицательным значением,
в случае, когда устройство индуктосинного типа содержит ползун и используется для определения значений величины линейного перемещения, оно содержит ползун, содержащий первый профиль обмотки стороны ползуна, и второй профиль обмотки стороны ползуна, имеющие разный шаг между проводниками, статор, содержащий первый профиль обмотки стороны статора и второй профиль обмотки стороны статора, имеющие разный шаг между проводниками, при этом ползун и статор расположены так, что обращены друг к другу, при этом первый и второй профили обмотки стороны ползуна и первый и второй профили обмотки стороны статора обращены один к другому; средство определения значений величины линейного перемещения, при этом соотношение между шагом Pm между проводниками первого профиля обмотки стороны статора и шагом Ps между проводниками второго профиля обмотки стороны статора удовлетворяет соотношению Ps=L/((L/Pm)+1), где L - детектированная величина общего перемещения, относительное положение между первым и вторым профилями обмотки стороны ползуна и первым и вторым профилями обмотки стороны статора установлено так, что обе из детектированной величины перемещения Om и детектированной величины перемещения Os были равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, при этом детектированная величина перемещения Om определяется на основе наведенного напряжения первого профиля обмотки стороны статора, а детектированная величина перемещения Os определяется на основе наведенного напряжения второго профиля обмотки стороны статора, причем средство определения значений величины линейного перемещения предназначено для определения абсолютной величины перемещения Z ползуна согласно формуле Z=E·L/Ps+Om так, что детектированная величина перемещения Оm определяется на основе наведенного напряжения первого профиля обмотки стороны статора; детектированная величина перемещения Os определяется на основе наведенного напряжения второго профиля обмотки стороны статора; значение D определяется на основе формулы D=Os-Om; значение Е определяется по формуле E=D+Ps, когда значение D является отрицательным значением; и значение Е определяется по формуле E=D, когда значение D является неотрицательным значением.
8. Устройство по п.7, отличающееся тем, что в случае, когда устройство индуктосинного типа содержит ротор и используется для определения значений величины углового перемещения, средство определения значений величины углового перемещения предназначено для корректирования обоих из детектированных углов Om и Os, чтобы они были равны 0°, когда абсолютный угол ротора равен 0°, согласно величинам отклонений детектированных углов Om и Os от 0°, детектированные углы получены в предварительном эксперименте, когда абсолютный угол ротора равен 0°, в случае, когда устройство индуктосинного типа содержит ползун и используется для определения значений величины линейного перемещения, средство определения значений величины линейного перемещения предназначено для корректирования обеих из детектированных величин перемещения Om и Os до 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, согласно величинам отклонений детектированных величин перемещения Om и Os от 0 мм, причем детектированные величины получены предварительным экспериментом, когда абсолютная величина перемещения ползуна равна 0 мм.
9. Способ определения значений величины линейного или углового перемещения в устройстве индуктосинного типа,
в случае, когда устройство индуктосинного типа содержит ротор и используется для определения значений величины углового перемещения, оно содержит статор, содержащий первый профиль обмотки стороны статора, и второй профиль обмотки стороны статора, имеющие разный шаг между проводниками, ротор, содержащий первый профиль обмотки стороны ротора, и второй профиль обмотки стороны ротора, имеющие разный шаг между проводниками, при этом статор и ротор расположены так, что обращены друг к другу, при этом первый и второй профили обмотки стороны статора и первый и второй профили обмотки стороны ротора обращены один к другому; причем в указанном устройстве соотношение между шагом Pm между проводниками первого профиля обмотки стороны ротора и шагом Ps между проводниками второго профиля обмотки стороны ротора удовлетворяет соотношению Ps=360/((360/Pm)+1); и относительное положение между первым и вторым профилями обмотки стороны ротора и первым и вторым профилями обмотки стороны статора установлено из условия, что оба из детектированного угла Om и детектированного угла Os были равны 0°, когда абсолютный угол ротора равен 0°, детектированный угол Om определяется на основе наведенного напряжения первого профиля обмотки стороны ротора, а детектированный угол Os определяется на основе наведенного напряжения второго профиля обмотки стороны ротора;
способ заключается в том, что
определяют абсолютный угол Z ротора согласно формуле Z=E·360/Ps+Om, при этом детектированный угол Оm определяют на основе наведенного напряжения первого профиля обмотки стороны ротора; детектированный угол Os определяют на основе наведенного напряжения второго профиля обмотки стороны ротора; значение D определяют по формуле D=Os-Om; значение Е определяют по формуле E=D+Ps, когда значение D является отрицательным значением; значение Е определяют по формуле E=D, когда значение D является неотрицательным значением,
а в случае, когда устройство индуктосинного типа содержит ползун и используется для определения значений величины линейного перемещения, оно содержит ползун, содержащий первый профиль обмотки стороны ползуна, и второй профиль обмотки стороны ползуна, имеющие разный шаг между проводниками, статор, содержащий первый профиль обмотки стороны статора, и второй профиль обмотки стороны статора, имеющие разный шаг между проводниками, при этом ползун и статор расположены так, что обращены друг к другу, при этом первый и второй профили обмотки стороны ползуна и первый и второй профили обмотки стороны статора обращены один к другому;
при этом способ заключается в том, что
устанавливают соотношение между шагом Pm между проводниками первого профиля обмотки стороны статора и шагом Ps между проводниками второго профиля обмотки стороны статора так, что выполняется соотношение Ps=L/((L/Pm)+1), где L - детектированная величина общего перемещения, и устанавливают относительное положение между первым и вторым профилями обмотки стороны ползуна и первым и вторым профилями обмотки стороны статора так, что обе из детектированной величины перемещения Om и детектированной величины перемещения Os были равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, при этом детектированную величину перемещения Om определяют на основе наведенного напряжения первого профиля обмотки стороны статора, а детектированную величину перемещения Os определяют на основе наведенного напряжения второго профиля обмотки стороны статора, затем определяют абсолютную величину перемещения Z ползуна по формуле Z=E·L/Ps+Om, при этом детектированную величину перемещения Om определяют на основе наведенного напряжения первого профиля обмотки стороны статора; детектированную величину перемещения Os определяют на основе наведенного напряжения второго профиля обмотки стороны статора; значения D определяют по формуле D=Os-Om; значение Е определяют по формуле E=D+Ps, когда значение D является отрицательным значением; значение Е определяют по формуле E=D, когда значение D является неотрицательным значением.
10. Способ по п.9, отличающийся тем, что
в случае, когда устройство индуктосинного типа содержит ротор и используется для определения значений величины углового перемещения, корректируют оба из детектированных углов Om и Os, чтобы они были равны 0°, когда абсолютный угол ротора равен 0°, согласно величинам отклонений детектированных углов Om и Os от 0°, причем детектированные углы получают предварительным экспериментом, когда абсолютный угол ротора равен 0°,
а в случае, когда устройство индуктосинного типа содержит ползун и используется для определения значений величины линейного перемещения, корректируют обе из детектированных величин перемещения Om и Os, чтобы они были равны 0 мм, когда абсолютная величина перемещения ползуна равна 0 мм, согласно величинам отклонений детектированных величин перемещений Om и Os от 0 мм, причем детектированные величины получают предварительным экспериментом, когда абсолютная величина перемещения ползуна равна 0 мм.
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Индуктосин | 1988 |
|
SU1511822A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1784836A1 |
| Индуктосин | 1987 |
|
SU1429240A2 |

