(54) ДАТЧИК ПЕРЕМЕЩЕНИЯ - ИНДУКТОКОР



| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения - многоотсчетныйиНдуКТОКОР | 1977 |
|
SU817892A1 |
| Многофазный индукционный датчик положения | 1974 |
|
SU551500A1 |
| Датчик перемещения - "индуктокор | 1978 |
|
SU817894A1 |
| Датчик перемещений | 1978 |
|
SU817893A1 |
| Индуктосин | 1983 |
|
SU1136266A1 |
| Датчик перемещений | 1982 |
|
SU1019218A1 |
| Линейный индуктосин | 1975 |
|
SU581483A1 |
| Многоотсчетный датчик положенияи СпОСОб изМЕРЕНия пОлОжЕНия СпОМОщью дАТчиКА | 1976 |
|
SU817738A1 |
| Датчик перемещений | 1979 |
|
SU848985A1 |
| Датчик перемещений (его варианты) | 1980 |
|
SU994907A1 |

1
Изобретение относится к приборостроению и электротехнике и может быть использовано в устройствах измерения перемещений подвижных узлов станков, измерительных машин .и приборов .
В современном машиностроении и приборостроении для определения точного взаимного положения перемещаемых узлов станков, машин или приборов широко используются датчики с печатными обмотками, получившее название индуктосин 13 .
Недостатки данных датчиков состоят в малой надежности и сложности съема выходного сигнала с ротора из-за необходимости применения контактного токосъема.
Наиболее близким к предлагаемому является датчик перемещения, содержащий неподвижный и подвижный элементы с плоскими противолежащими поверхностями, снабженными печатными обмотками с равномерным шагом Т, на неподвижном элементе расположены две секционированные обмотки, сдвинутые одна относительно другой на угол, кратный 1/4 Т, а обмотка подвижного элемента образована из радиально .расположенных проводников. Съем
сигнала г; ротора осуществляется с помощью кольцевого воздушного трансформатора р.
Однако использование кольцевого трансформатора для съема сигнала уменьшает точность и надежность устройства. Точность данного датчика невелика также из-за наличия высших гармоник в кривой поля, из-за кон0турных токов в обмотках, а также из-за емкостной связи между обмотками различных элементов датчика.
Цель изобретения - повышение надежности и точности датчика.
Для реализации поставленной цели
5 неподвижный элемент снабжен дополнительной обмоткой с ш&гом Т, смещенной радиальной относительно основных обмоток и расположенной напротив обмотки подвижного элемента, которая выполнена короткозамкнутой.
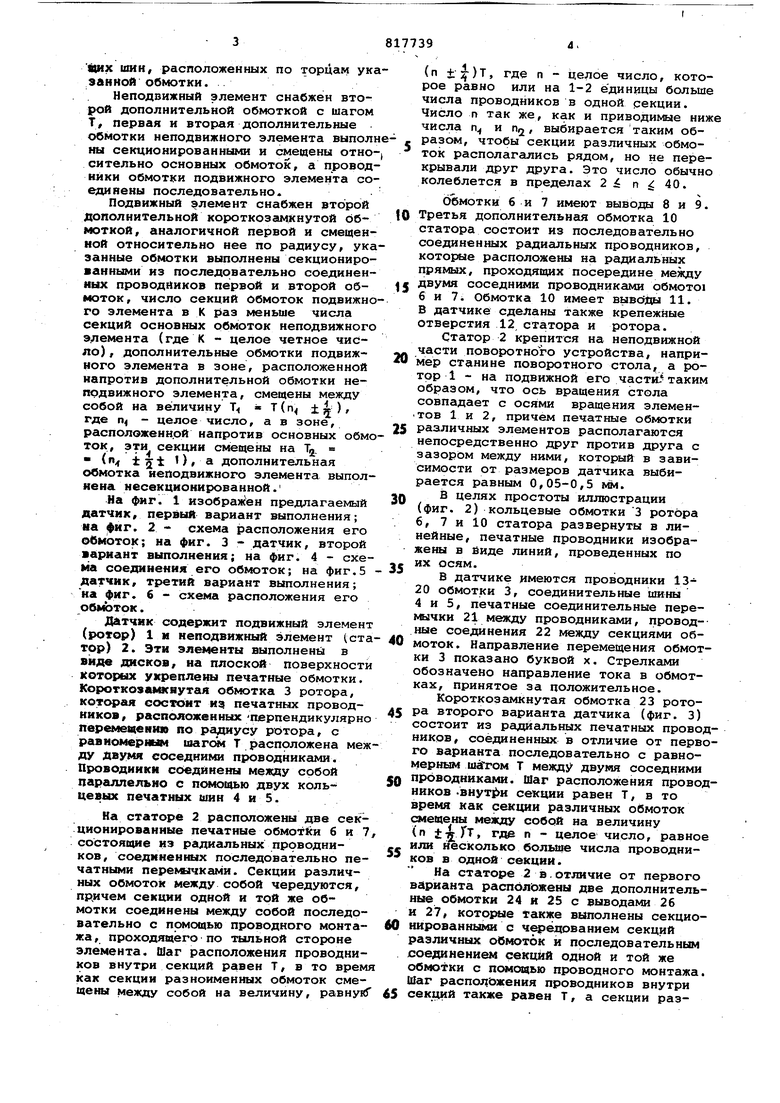
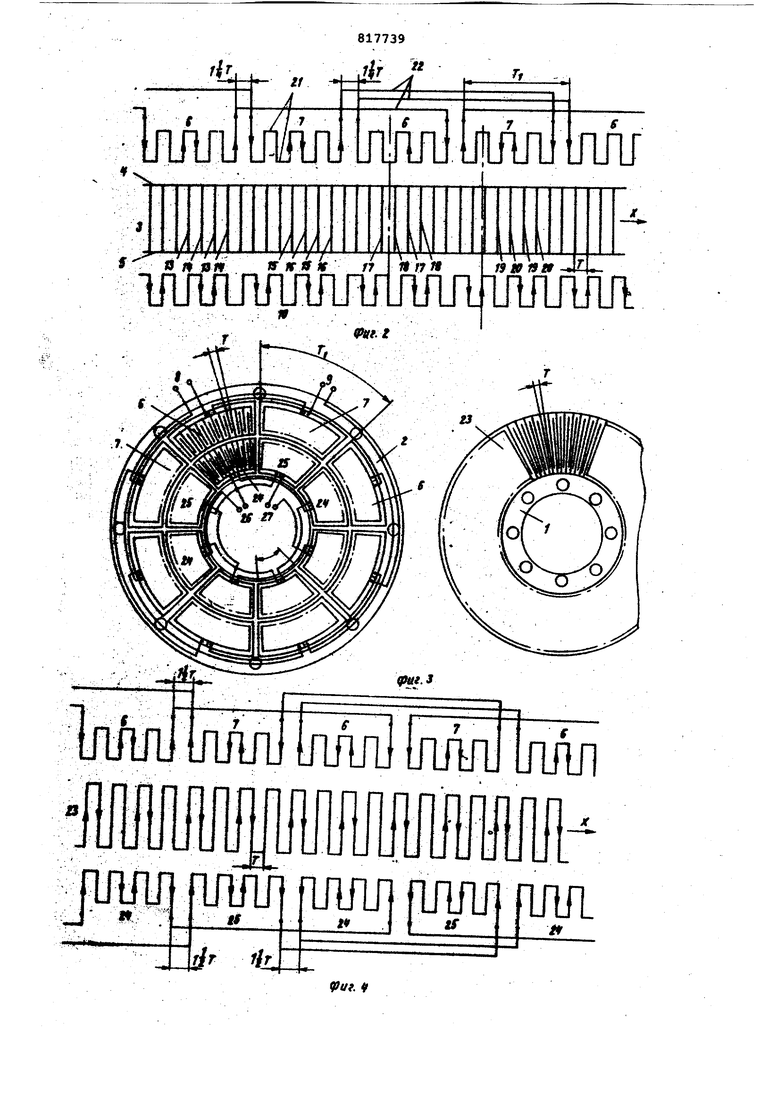
Дополнительная обмотка неподвижного элемента выполнена несекционированной, состоящей из последова5тельно соединенных радиальных проводников, которые сдвинуты на 1/4 Т относительно проводников основных обмоток, а проводники обмотки подвижного элемента соединены между собой 0 параллельно с помощью короткозамыкаюй|их шин, расположенных по торцам ука занной обмотки. Неподвижный элемент снабжен второй дополнительной обмоткой с шагом Т, первая и вторая дополнительные обмотки неподвижного элемента выпол ны секционированными и смешены отно сительно основных обмоток, а провод ники обмотки подвижного элемента со единены последовательно Подвижный элемент снабжен второй дополнительной короткозамкнутой обмоткой, аналогичной первой и смещенной относительно нее по радиусу, ука занные обмотки выполнены секционированными из последовательно соединенных проводников первой и второй обмоток, число секций обмоток подвижно го элемента в К раэ меньше числа секций основных обмоток неподвижного элемента (где К - целое четное число) , дополнительные обмотки подвижного элемента в зоне, расположенной напротив дополнительной обмотки неподвижного элемента, смещены между собой на величину Т Т (п ± ) где п - целое число, а в зоне, расположенн.ой напротив основных обмо ток, эти секции смещены на . (п ij ) дополнительная обмотка неподвижного элемента выполяеиа несекционированной. На фиг. 1 изображен предлагаемый датчик, первый вариант выполнения; на фиг. 2 - схема расположения его обмоток; на фиг. 3 - датчик, второй ариант выполнения; на фиг. 4 - схема соединения его обмоток; на фиг.5 датчик, третий вариант выполнения; на фиг, 6 - схема расположения его обмоток. Датчик содержит подвижный элемент (ротор) 1 и неподвижный элемент (ста тор) 2. Эти элементы выполнены в виде дисков, на плоской поверхности xoTOPtdX укреплены печатные обмотки. Короткоза 0снутая обмотка 3 ротора, состоит и печатных проводников, расположенных перпендикулярно перемемемню по радиусу ротора, с равиомерным шагсв Т распрложена меж ду двумя соседними проводниками. Проводники соединены между собой параллельно с помощью двух кольцевых печатных шин 4 и 5. На статоре 2 расположены две сек циоиированиые печатные обмотки 6 и 7 состоящие из радиальных проводников, соединенных последовательно печатными переквчками. Секции различных Обмоток между собой чередуются, причем секции одной и той же обмотки соединены между собой последовательно с помощью проводного монтажа , проходящего по тыльной стороне элемента. Шаг расположения проводников внутри секций равен Т, в то врем как секции разноименных обмоток смещены между собой на величину, равнук (п +:)Т, где п - целое число, которое равно или на 1-2 единицы больше числа проводников в одной рекции. Число п так же, как и приводимые ннже числа п и п, выбирается таким образом, чтобы секции различных обмоток располагались рядом, но не перекрывали друг друга. Это число обычно колеблется в пределах 2 i п 40. .. Обмотки 6 и 7 имеют выводы 8 и 9. Третья дополнительная обмотка 10 статора состоит из последовательно соединенных радиальных проводников, KOTOfftie расположены на радиальных прямых, проходящих посередине между двумя соседними проводниками обмото 6 и 7 Обмотка 10 имеет вывсгды 11. В датчике сделаны также крепежные отверстия 12 статора и ротора. Статор 2 крепится на неподвижной части поворотного устройства, например станине поворотного стола, а ротор 1 - на подвижной его части- таким образом, что ось вращения стола совпадает с осями вращения элементов 1 и 2, причем печатные обмотки различных элементов располагаются непосредственно друг против друга с зазором между ними, который в зависимости от размеров датчика выбирается равным 0,05-0,5 VM. В целях простоты иллюстрации (фиг. 2) кольцевые обмотки 3 ротора 6, 7 и 10 статора развернуты в линейные, печатные проводники изображены в ёиде линий, проведенных по их осям. В датчике имеются проводники 1320 обмотки 3, соединительные шины 4 и 5, печатные соединительные перемычки 21 между проводниками, проводные соединения 22 между секциями обмоток. Направление перемещения обмотки 3 показано буквой х. Стрелками обозначено направление тока в обмотках, принятое за положительное. Короткозамкнутая обмотка 23 ротора второго варианта датчика (фиг. 3) состоит из радиальных печатных проводников, соединенных в отличие от первого варианта последовательно с равноМерным шаТом Т между двумя соседними проводниками. Шаг расположения проводников -BHyTj H секции равен Т, в то время как секции различных обмоток смещены между собой на величину (п tw ГТ, где п - целое число, равное или несколько больше числа проводников в одной секции. На статоре 2 в.отличие от первого варианта расположены две дополнительные обмотки 24 и 25 с выводами 26 и 27, которые также выполнены секционированными с чередованием секций различных обмоток и последовательным соединением секций одной и той же обмотки с помсяцью проводного монтажа. Шаг расположения проводников внутри секций также равен Т, а секции различных обмоток смещены между собой на Т - ()T, где п - целое чис ло, равное или несколько больше числа проводников одной секции обМоток 24 или 25. Стрелками на обмотках (фиг. 4) обозначено направление тока, принятое за положйте:1ьное, а положительное направление переме& ения о(4 ягк1$ ротора покаэ1ано буквой х. Для третьего варианта датчик ша расположения,проводников внутри сек ций равен Т, однако в отличив от пе вого варианта секции различшм обмо .ток смещены между собой на Т -(п;) где п - целое число« равное или бол ше числа проводников в одной секции Третья обмотка статора, состоящая, как и в переем варианте, из ра диальных проводников, соедняенных последовательно, имеет равномершайшаг Т между соседними проводниками. В отличие от предыдущих вариантов на роторе 1 расположены две короткозамкнутые обмотки 28 и 29, KOTopi:ie выполнены секциоиированныкш с чередованием секций различных обмоток и шагом между соседними проводникам внутри секции. Капичество секций одной обмотки 28 или 29) в целое число раз меяьш1е числа секций одной из обмоток статора (данная обмотка ансшогична обмотке 6 или 7 на фигЛ В части обмоток 28 и 29, расположенной нгшротив третьей обмотки статора, секции различных обмоток 28 смещены между собой иа величину Т T(ryi), где п. - целое число, равное или больше числа проводников в одной секции, а в части обмоток 28 и 29, расположенной напротив секционироваиных обмоток статора, зти ceKiutK дополнительно смещены на Т, т.е. имеют смещение Т а (п ±ii 1) Секции одной и той же ббмотки соединены между собой последовательно с помощью проводного монтажа. Коэффициент взаимоиндукции М между системой проводншсов, аналогичной обмотке 10 или секциям обмо|ток 6 и 7, и проводником обмотки 3, находящимся в непосредствеиной связи с проводникагьш такой системы, может быть определен по формуле: I dk -«А I собт к n..v5f где Кц - коэффициент пропорциональности ; m - номер пространственной гармонии коэффициента взаимо- индукияя; зазор/между обмотками по осям проводников; текущее расстояние проводника обмотки 3 от проводника соответствующей обмотки, принятого начальньвм. Принимгиот в качестве начальных Проводники обмоток 6, 7 и 10 с током, направленным вверх, а в качестве начального положения обмотки 3 ее же положение (фиг. 2), Обозначают через Ирл коэффициент взаимоийдукЦии между обмотками 6 и 7 или 1.0 (р 6, 7 и 10) и проводниками 13-20 (q 13-20) обмотки 3. Согласно формуле (1) для первой гармоники М(т + } Иб.,а -V° 5 - Щ- . где Mj - амплитудное значение первой гармоники. Аналогичнбмогут быть записаны . выражения и для вэанмоиндуктивностей остальных проводников. Эапитывают обмотки б и 7 соответственно токами Зй -3fT siniu t; JY . t, где 3m акйшитудное значение тока. Находят ЭДС, наводимую в обмотке 10 током, щэотекающим в проводниках 13-20. Впровсщнике 13 наводится ЭДС . . - „ , . ; . Ч - -.«Мп. вследствие симметричности расположения секций обмоток 6 и 7, а также вследствие того, что в соседних проврли иках Обмотки 3 наводится ЭДС, противоположная по знаку, шины 4 и 5 находятся под одинаковым потенциалом, который принят за нулевой. По-этому в проводнике 13 протекает ток : .. где г - сопротивление проводника Под действием этого тока в обмотке 10 наводится ЭДС Е«,. -Н.„,. - SI п ,йу3 xcos stnwt«-y s I nuit. I TOT же результат получается при рассмотрении проводников 14, 17 и 18. В проводнике 15 наводится ЭДС to..ts .об|( )einu)T. в проводника 15 протекает ток Зд a,|L. , под действием которого в обмотке 10 наводится ЭДС (x-f)« Ю,,( (x4j)oosuyt| u) M oo5 oosu;t Этот же результат получаем при рассмотрении проводников 16, 19 и 20. .ЭДС, наводимгш в обмотке 10 токаравна:W (« 9Т- 3 -бП ТX eintut).(wt+). уммарная ЭДС, наводимая в обмотке 0 первой га{ юникой поля, равна: . 1 Wt + ,,(2) где N - количество проводников обмотки 3. Для высших гармоник поля ЭДС выводится аналогично, общая ЭДС, наво димая в обмотке 10, представляется виде: , где - амплитуда т-ой гармоники поля, которая согласно (U) равна: (М ЭДС для индуктосина с учетом выс ших гармоник поля представляется фо мулой, аналогичной (1), однако М &ХОДИТ в нее в первой степени. В Индуктосине отношение амплитуд составляющих ЭДС/ обусловленных вые шими гармониками поля, равно: ЕП тогда как в предлагаемом датчике согласно (3) это отношение равно: (, (01-) Е тв Исходя из формул (5) и (-6), в датчике.- высшие гармоники поля .ослаб ляются значительно интенсивнее че в индуктосИне, и для их подавления ие требуется Применения специальных мер. Известно, что в фазовых датчиках при измерении фазы сигнала вторичны преобразователем (фазометром).возни кает некоторая погрешность. Очевидно, что при одной и той же относите ной погрешности измерения а.бсолютна погрешность тем меньше, чем меньше период измерения фазы датчика. Учит вая формулу (2) при одном и том же шаге Т обмотКи шка1ты период изменения фазы сигнала датчика в 2 раза меньше, чем индуктосина, что приводит к уменьшению погрешности измере ния фазы во вторичном преобразователе. В первом варианте датчика меньше погрешностей, обусловленных контурными токами и емкостной составляющей поля, чем в индуктосине. Это объясняется тем, что контурные токи и токи от емкостной составляющей поля залвлкаются накоротко в кольцевых шингис 4 и 5 обмотки шкалы. Для второго варианта датчика по аналогии с первым суммарная ЭДС, наводимая в обмотке 24 током Л определяется ЧА - 03 с о S {(О t + ) ( 7) Аналогично находится ЭДС, наводимая током Заг в обмотке 25 Е.-. l UjVlS - - - « .in -j- cos(uJt + ) (8) f Для получения необходимого сигнала поворачивают один из сигналов (7) и (8) .на +90 и затем слагают полученную ЭДС с той, которая остается без изменения. Например, повернув на -90, получают N3 sin (lut 2ft r п cos Сложив полученный сигнал с Е„с-, получагот выходную ЭДС датчика, обусловленную первой гармоникой поля ИЗт, ,2. .Л . л ... 2ltx Е, i: 1 UJ М, Указанный поворот фазы сигнала одной из секционированных обмоток и суммирование с сигналом другой обмотки применяется в индуктосине. при его работе в фазовом режиме и питании со стороны обмотки шкалы. Полученный сигнал Е аналогичен сигналу для первого варианта датчика. Аналогичны также преимущества датчика перед индуктосином по составу высших пространственных гармбник и по точности измерения фазы сигнала вторичным преобразователем. ЭДС на выходе третьего варианта датчика бых. (a;t .). Таким образом, сигнал на выходе третьего варианта датчика аналогичен сигналам для первого и второго вариантов датчика. Аналогичны также преимущества третьего варианта по сравнению с индуктосином по составу высших пространственных гармоник и по точности измерения фазы вторичным преобразователем. в предлагаемом датчике съем сигнала осуществляется проще, чем в индуктосине, так как входные и выходные обмотки датчика расположены на неподвижном-элементе, статоре, а в подвижном элементе, роторе токоподвод отсутствует, что снимает необходимость применения контактных колец и щеток. Предложенный датчик также может выполнен не только в круговом, но и в линейном вариантах. Формула изобретения 1. Датчик перемещения - иидуктокор, содержащий неподвижный и подвижный элементы с плоскими противолежащими поверхностями, снабженными печатными обмотками d равномерным шагом Т, на неподвижном элементе расположены две секционированные обмотки, сдвинутые одна относительно другой на угол, кратный 1/4 Т, а обмотка подвижного элемента образована из радиально расположенных проводников, отличающийся тем, что, с целью повышения надежности и точности, неподвижный элемент снабжен дополнительной обмоткой с шагом Т, смещенной радиально относительно основных обмоток к расположенной напротив обмотки подвижного элемента, которая вьтолнена короткозамкнутой. 2.Датчик по П.1, о т л и ч аю щ и и с я тем, что дополнительная обмотка неподвижного элемента выполнена несекционированной, состоящей из .последовательно соединеных радигшьных проводников, которые сдвинуты на 1/4 Т относительно пров $пников основных обмоток, а проводники обмотки подвижного элемента соединены между собой параллельно с помощью короткозамлкающих шин, расположенных по торцам указанной обмотки. 3.Датчик по П.1, от л и ч а ющ и и с я тем, что неподвижный элемент снабжен второй дополнительной обмоткой с шагом т, первая и вторая дополнительные обмотки неподвижного элемента выполнены секционировайными и смещены относительно секций основных обмоток, а проводники обмот ки подвижного элемента соединены последовательно. 4.Датчик по П.1, отличающийся тем, что подвижнь1й элемент снабжен второй дополнительной.короткозамкнутой обмоткой, аналогичной первой и смещенной относительно нее по радиусу, указанные обмотки выполнены секционированными из последовательно соединенных проводников первой и второй обмоток, число секций обмоток подвижного элемента в К раз меньше числа секций основных обмоток неподвижного элехюнта (где К - целое четное число), дополнительные обмотки подвижного элемента в зоне, расположенной нгшроткв дополнительной обмотки непод ижиого элемента, смещены между собой на величину Т) - Т(п, +х ),где я - целое число, а в зоне, располояюнной напротив основных обмоток, эти секции смещены на bj - (п l), а дополнительная обмотка неподвижного элемента выполнена яесекционированной. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 392539, кл. G 08 С 9/04, 1971. 2.Авторское свидетельство СССР 155035, кл. G 08 С 9/04, 1961. тпллш1шш IfiAnJljm шлтял т nj ллл
Ш
Ш1ЛШ1Г
I If tf
ts
Ш1
Ш /i
28
