Изобретение относится, в общем, к гидравлическому управлению скважинными инструментами, в частности к способам и устройствам для определения положения/состояния таких гидроприводных средств.
Получение углеводородов из скважины требует применения глубинного эксплуатационного оборудования, регулирующего поток углеводородного флюида в насосно-компрессорную (лифтовую) трубу. Типовое оборудование для регулирования расхода может содержать узел золотникового клапана или узел другого клапана, в котором втулка перемещается между открытым и закрытым положениями для выборочного пропускания продукта в насосно-компрессорную трубу. Управление узлом клапана осуществляется с поверхности с использованием гидравлических линий управления или другими способами.
В простой системе золотниковый клапан может перемещаться только между двумя положениями или состояниями - полностью открытым и полностью закрытым. Применяются также более сложные системы, когда скважина проходит через несколько углеводородных зон и есть необходимость получать продукт из некоторых или из всех зон. В таком случае желательно иметь возможность измерять и регулировать величину потока из каждой из зон. Тогда часто желательно использовать устройства регулирования расхода, которые можно открывать постепенно дискретными положениями или состояниями, чтобы пропускать разный по величине поток из конкретной зоны. Известны несколько "интеллектуальных" гидравлических устройств, которые сохраняют информацию о состоянии устройства. В качестве примера таких устройств можно привести устройства, распространяемые на рынке под названиями НСМ-А In-Force™ Variable Choking Valve и In-Force™ Single Line Switch, каждое из которых поставляется фирмой Baker Oil Tools, г.Хьюстон, Техас. В эти устройства входит скользящая втулка, приводимая в движение парой гидравлических линий, перемещающих втулку в сбалансированной гидравлической камере. Для фиксации втулки в нескольких дискретных положениях используется храповой механизм с J-образными пазами, что позволяет изменять уровень потока флюида через устройство.
Так как эти устройства можно переводить в несколько состояний или положений, важно определение или мониторинг положения таких устройств. В настоящее время определение проводится путем измерения количества гидравлической текучей среды, перемещенной в линиях управления при движении устройства между соседними положениями. Измерение перемещения гидравлической текучей среды показывает конкретное состояние, в которое перешло средство регулирования, так как при каждом таком переходе перемещаются различные объемы текучей среды. Однако в некоторых случаях, таких как управление подводным оборудованием, возможность измерения объема текучей среды может отсутствовать. Кроме того, способ измерения объема текучей среды иногда может быть неточным по ряду причин, включая утечки в гидравлических линиях управления и в соединениях или уплотнениях, которые приводят к потерям текучей среды, что вызывает ошибки в определении положения. Гидравлические линии управления могут также расширяться под давлением (эффект накопления) или деформироваться под воздействием высоких температур в стволе скважины. В длинных линиях дополнительно накопленный объем за счет такого расширения или деформации может быть больше, чем обычно небольшая разница в объемах текучей среды, перемещаемых при различных переходах, и приводить к неточному определению положения.
Настоящее изобретение направлено на решение некоторых из этих проблем уровня техники.
В соответствии с одним из аспектов настоящего изобретения предлагается используемое в скважине устройство для регулирования расхода потока флюида из пласта в ствол скважины, содержащее клапанный элемент, выполненный с возможностью перемещения для регулирования потока при нахождении в стволе скважины. Имеется линия подачи рабочей текучей среды под давлением для перемещения клапанного элемента с обеспечением возможности прохождения флюида в ствол скважины. С линией подачи рабочей текучей среды связан скважинный датчик с возможностью указания положения клапанного элемента. Кроме того, имеется контроллер, способный получать сигналы от датчика и включающий предварительно запрограммированные команды для регистрации результатов измерений датчика и соответствующего промежутка времени перемещения клапанного элемента.
В частных вариантах осуществления клапанный элемент выполнен с возможностью перемещения в несколько положений. Устройство содержит первую и вторую камеры текучей среды, выполненные с возможностью совместного действия для ступенчатого перемещения клапанного элемента в несколько положений. Указанные несколько положений могут соответствовать нескольким J-образным пазам.
Датчик расположен в непосредственной близости от клапанного элемента и выбран из группы, включающей датчик давления и датчик расхода.
Контроллер обеспечивает определение на основе полученных от датчика сигналов положения клапанного элемента, причем в контроллер заложен сохраненный профиль давления, связанный с положением клапанного элемента, и контролер способен обеспечивать сравнение измеренного давления с этим сохраненным профилем давления для определения положения клапанного элемента. Контроллер может также обеспечивать определение положения клапанного элемента путем сравнения сигналов от датчика с предварительно заданной уставкой, занесенной в память, связанную с контроллером.
В соответствии с другим аспектом изобретения предлагается скважинное устройство для регулирования расхода, содержащее гидроприводной золотниковый клапан, действующий между первым положением, в котором он имеет первое положение по отношению к потоку флюида, и вторым положением, в котором он имеет второе положение по отношению к потоку флюида. Имеется гидравлическая линия управления, связанная в процессе работы с золотниковым клапаном с возможностью подачи гидравлической текучей среды для обеспечения перехода клапана между указанными положениями, и скважинный датчик давления, связанный в процессе работы с гидравлической линией управления с возможностью определения давления текучей среды в ней для указания положения золотникового клапана. Также имеется контроллер, способный получать сигналы от расположенного в скважине датчика давления и включающий предварительно запрограммированные команды для регистрации значений давления и соответствующего промежутка времени перемещения клапанного элемента.
В соответствии с другим аспектом изобретения предлагается способ определения положения скважинного средства регулирования расхода, который включает подачу текучей среды под давлением в средство регулирования расхода для перемещения регулирующего элемента этого средства в определенное положение. В скважине измеряется давление поданной текучей среды. Осуществляется регистрация измеренного давления и соответствующего промежутка времени перемещения указанного регулирующего расход элемента. Положение средства регулирования расхода определяется с использованием измеренного давления подаваемой текучей среды и указанного промежутка времени.
В частных вариантах осуществления используют расположенный на поверхности контроллер, определяющий положение средства регулирования расхода по измеренному давлению и указанному промежутку времени. Сохраняют в контроллере профиль давления, связанного с перемещением регулирующего элемента, и обеспечивают сравнение измеренного давления с этим профилем давления для определения положения средства регулирования расхода.
Элемент регулирования расхода выполнен с возможностью перемещения в несколько положений. Определение каждого из указанных нескольких положений осуществляют по профилю давления, связанному с каждым из этих состояний.
В соответствии с еще одним аспектом настоящего изобретения предлагается способ определения положения скважинного средства регулирования расхода, в котором связывают профиль давления с перемещением регулирующего средства. Осуществляют измерение в скважине расхода текучей среды в канале гидравлического питания, сообщающемся со средством регулирования расхода. Осуществляют регистрацию давления и соответствующего промежутка времени для перемещения средства регулирования расхода. И определяют положение средства регулирования расхода по измеренному расходу текучей среды и указанному профилю давления.
В частных вариантах осуществления расход текучей среды измеряют датчиком, выбранным из группы, включающей датчик давления и датчик расхода.
В предлагаемом способе также используют расположенный на поверхности контроллер, определяющий положение средства регулирования расхода по измеренному в скважине расходу текучей среды. Причем сохраняют в контроллере профиль давления, связанного с перемещением регулирующего элемента.
Упомянутое средство регулирования расхода может иметь несколько положений, характеризующихся профилем давления, связанным с каждым из этих состояний.
Для детального понимания настоящего изобретения ниже следует подробное описание предпочтительных вариантов его осуществления с прилагаемыми чертежами, на которых одним и тем же элементам присвоены одинаковые ссылочные номера и на которых:
на фиг.1 дано схематическое изображение скважинного комплекса, в котором показаны несколько углеводородных зон и места поступления флюида;
на фиг.2 дано схематическое изображение поперечного сечения приведенного в качестве примера узла золотникового клапана, включая систему датчика давления текучей среды, выполненного в соответствии с настоящим изобретением;
на фиг.3А схематически показаны храповой механизм с J-образными пазами и расположение зубцов, выполненных в соответствии с одним из вариантов настоящего изобретения;
на фиг.3Б схематически показаны альтернативные храповой механизм с J-образными пазами и расположение зубцов, выполненных в соответствии с одним из вариантов настоящего изобретения;
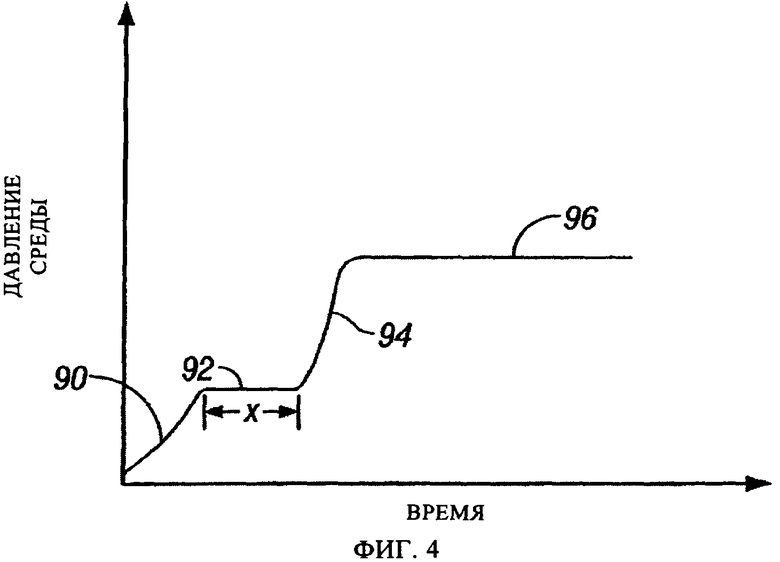
на фиг.4 дан график изменения давления текучей среды в зависимости от времени;
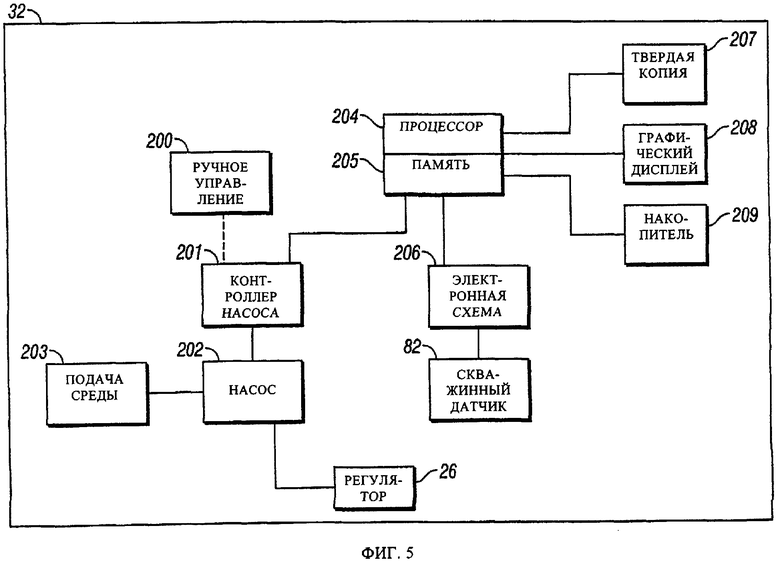
на фиг.5 дана блок-схема находящейся на поверхности системы мониторинга и управления, выполненной в соответствии с одним из вариантов настоящего изобретения.
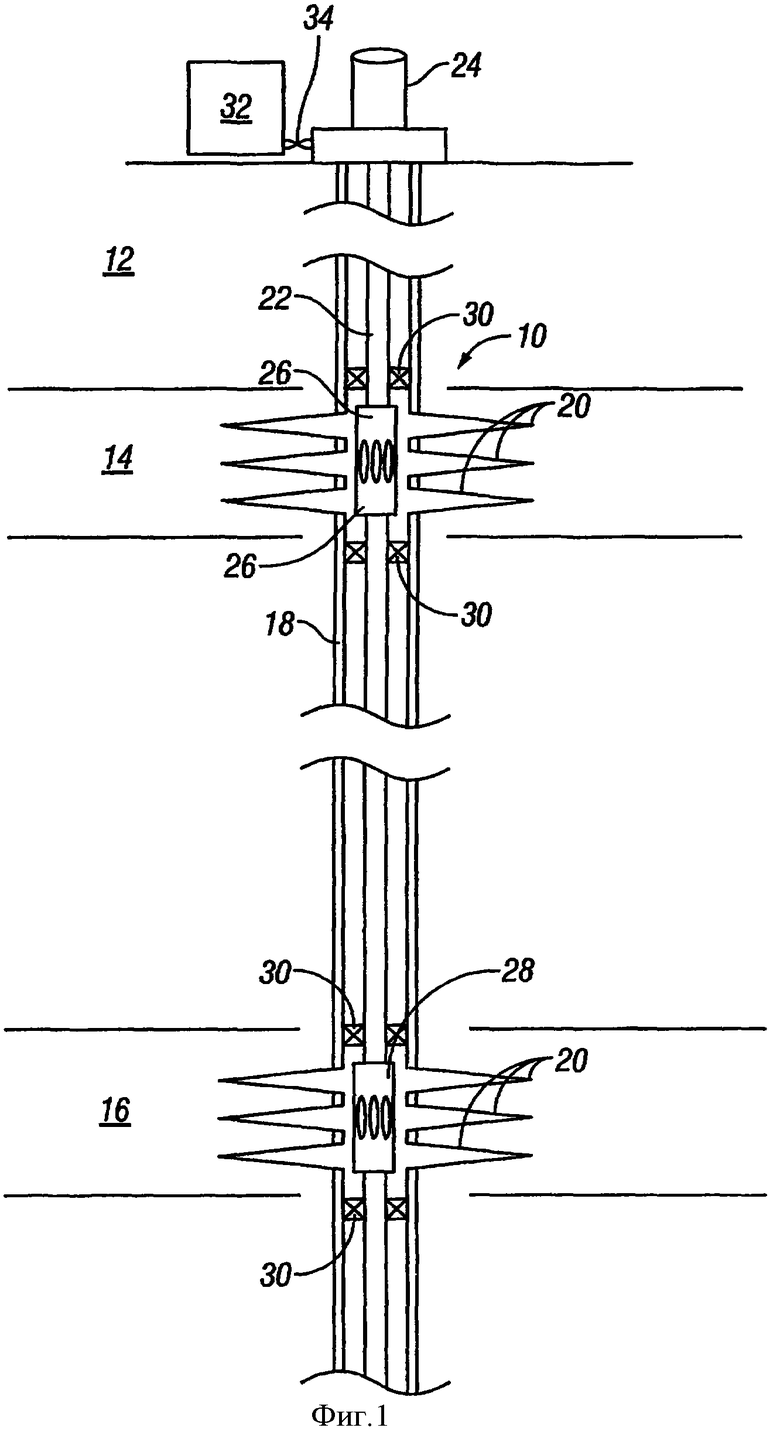
На фиг.1 в качестве примера представлена эксплуатационная скважина 10, проходящая через грунт 12 и несколько углеводородных зон, таких как зоны 14 и 16. Скважина 10 обсажена, и в обсадной колонне 18 непосредственно в каждой из зон 14, 16 выполнены перфорационные отверстия 20 для создания мест прохождения потока углеводородных флюидов из зон 14, 16 в скважину 10. Следует отметить, что хотя показан только один ствол скважины, на практике это может быть несколько многоствольных скважин, каждая из которых проходит через одну или более зон, таких как зоны 14, 16. Кроме того, хотя показаны только две зоны, для специалистов в данной области будет понятно, что таких зон может быть и больше.
Эксплуатационная насосно-компрессорная труба 22 проходит в скважине 10 от устья 24 скважины и содержит устройства (средства) 26, 28 для регулирования расхода, расположенные непосредственно в зонах 14, 16 соответственно. Пакеры 30 изолируют устройства 26, 28 для регулирования расхода в скважине 10. В одном из вариантов выполнения каждое из устройств 26, 28 для регулирования расхода представляет собой устройство золотникового типа, способное занимать более чем два рабочих положения, также называемых открытыми/закрытыми состояниями. В качестве примера таких устройств для регулирования расхода можно привести устройства, распространяемые на рынке под названиями НСМ-А In-Force™ Variable Choking Valve и In-Force™ Single Line Switch, каждое из которых поставляется фирмой Baker Oil Tools, г.Хьюстон, штат Техас, США.
Станция 32 мониторинга и управления расположена у устья 24 скважины и предназначена для оперативного управления устройствами 26, 28 для регулирования расхода. Гидравлические линии управления, в общем, обозначенные позицией 34, проходят от станции 32 мониторинга и управления вниз к устройствам 26, 28 для регулирования расхода. Станция 32 мониторинга и управления, известная в предшествующем уровне техники и предназначенная для управления скважинными гидравлическими устройствами для регулирования расхода, описана далее более подробно со ссылкой на фиг.5.
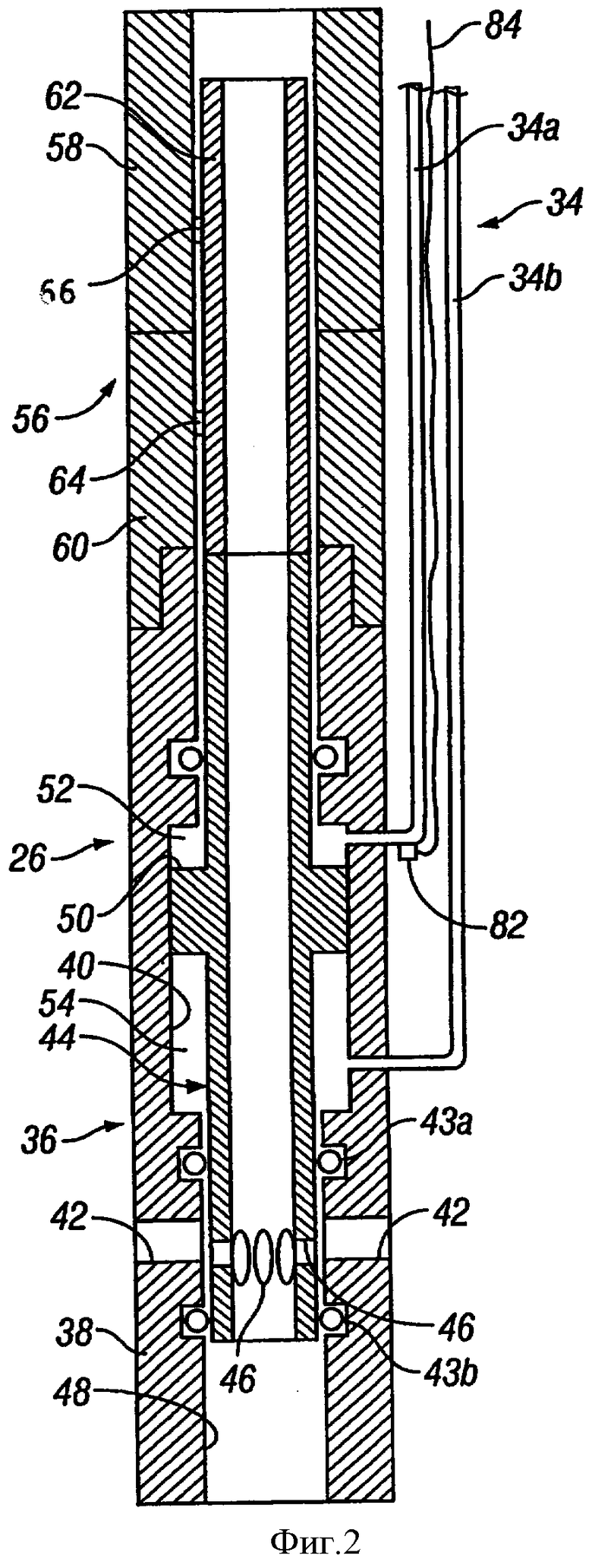
На фиг.2 показано в качестве примера отдельное устройство 26 для регулирования расхода и показана его взаимосвязь с приведенной в качестве примера схемой определения положения с датчиком давления. Для упрощения описания устройство 26 показано в упрощенном схематическом виде. Практически в качестве устройства 26 для регулирования расхода может выступать устройство для регулирования расхода типа НСМ-А In-Force™ Variable Choking Valve, поставляемое на рынок фирмой Baker Oil Tools, г.Хьюстон, Техас. Устройство 26 содержит переводник 36 узла скользящей втулки, имеющий цилиндрический наружный корпус 38, в котором сформирована камера 40 текучей среды. В корпусе 38 ниже камеры 40 выполнены отверстия 42, предназначенные для прохождения флюида. В корпусе 38 установлена скользящая втулка (золотник) 44, содержащая несколько радиально направленных через втулку каналов 46 флюида. Уплотнения 43а и 43b расположены в наружном корпусе 38 выше и ниже отверстий 42 флюида. Когда скользящая втулка 44 смещается по оси так, что поршень 50 находится близ низа камеры 40, каналы 46 оказываются ниже нижнего уплотнения 43b и поток в канал 48 корпуса 38 не проходит. В зависимости от положения по оси скользящей втулки 44 в корпусе 38 и в уплотнениях 43а,b каналы 46 втулки 44 могут быть выборочно установлены относительно отверстий 42 флюида, выполненных в корпусе 38, что позволяет изменять величину потока флюида в канал 48 корпуса 38, так как каналы 46 перекрывают отверстия 42 в различной степени. Скользящая втулка 44 содержит также расширенную наружную часть 50 поршня, находящуюся в камере 40 и разделяющую камеру 40 на верхнюю камеру 52 и нижнюю камеру 54. Уплотнение (не показано) на наружном диаметре поршня 50 гидравлически изолирует верхнюю камеру 52 от нижней камеры 54. Площадь поршня 50, обращенная в каждую из камер 52 и 54 в основном одинакова, так что равные давления в камерах 52 и 54 создают в основном равные противоположно направленные силы, действующие на поршень 50, то есть поршень 50 можно рассматривать как "сбалансированный". Для перемещения поршня 50 в одной из камер создается повышенное давление, и среда из другой камеры, находящейся под более низким давлением, выходит, в результате чего создается разбаланс сил, действующих на поршень 50, и поэтому поршень 50 перемещается в заданном направлении.
Гидравлические линии 34а и 34b управления в рабочем состоянии соединены с корпусом 38, так чтобы обеспечить подачу текучей среды в каждую из камер 52, 54 или отвод среды из них. Для специалистов в данной области будет понятно, что скользящую втулку 44 можно перемещать в корпусе 38 путем подачи гидравлической текучей среды в приемные камеры 52, 54 и отвода гидравлической текучей среды из них. Например, если задано движение втулки 44 вниз по отношению к корпусу 38, то гидравлическая среда закачивается через линию 34а управления только в верхнюю приемную камеру 52. Эта среда создает давление на верхнюю поверхность поршня 50, вынуждая втулку 44 перемещаться вниз. По мере движения втулки 44 вниз гидравлическая среда из нижней приемной камеры 54 выходит через линию управления 34b в направлении поверхностной части скважины 10. И наоборот, если задано перемещение втулки 44 вверх по отношению к корпусу 38, гидравлическая среда закачивается через линию управления 34b в нижнюю приемную камеру 54, создавая давление на нижнюю сторону части 50 поршня. По мере движения втулки 44 вверх гидравлическая среда через линию 34а управления выходит из приемной камеры 52.
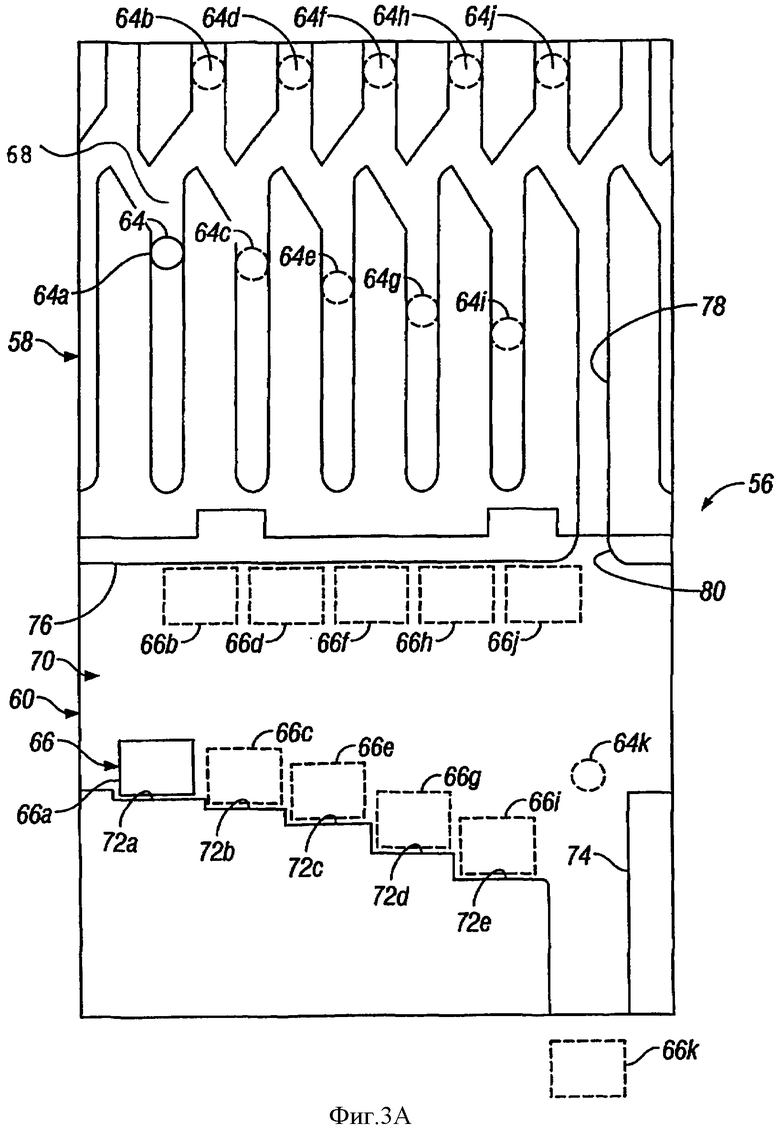
В одном из вариантов выполнения, представленном на фиг.3А, с верхним краем корпуса 38 золотникового клапана соединен переводник 56 узла храпового механизма с J-образными пазами. Переводник 56 узла храпового механизма служит для обеспечения нескольких заданных положений по оси или состояний скользящей втулки 44 в переводнике 36 узла втулки и обеспечения тем самым заданного уровня регулируемого расхода, связанного со степенью перекрытия в осевом направлении каналов 46 флюида с отверстиями 42 флюида. Переводник 56 узла храпового механизма содержит пару элементов 58, 60 наружного корпуса, соприкасающихся друг с другом и имеющих возможность проворачиваться относительно друг друга. В переводнике 56 удерживается зубчатая втулка 62, имеющая верхний и нижний выступающие наружу зубцы (выступы) 64, 66. Зубцы 64, 66 взаимодействуют с дорожками зубцов, углубленными во внутренние поверхности элементов 58, 60 корпуса. Эти дорожки показаны на фиг.3А, на которой изображены внутренние поверхности элементов 58, 60 наружного корпуса в "развернутом" виде. В верхнем элементе 58 наружного корпуса имеются углубленные извилистые дорожки 68, по которым перемещается верхний зубец 64. Нижний элемент 60 корпуса имеет углубленную область 70 перемещения зубца, в которой находится последовательность выступов 72а-72е, ограничивающих ход нижнего зубца и расположенных ступеньками. Ступенчатые выступы 72а-72е связаны со степенью перекрытия в осевом направлении каналов 46 флюида с отверстиями 42 флюида. Дорожка 74 нижнего зубца расположена у ограничивающего выступа 72е. Кроме того, в нижнем элементе 60 корпуса имеется верхний выступ 76, ограничивающий движение зубца. Дорожка 78 верхнего зубца выполнена в верхнем элементе 58 корпуса, и когда верхний и нижний элементы 58, 60 корпуса при повороте располагаются соответствующим образом, дорожка 78 верхнего зубца совпадает по направлению с пропускной дорожкой 80 зубца, так что верхний зубец 64 может перемещаться между двумя элементами 58, 60 корпуса.
Осевое перемещение скользящей втулки 44, вызываемое, как было описано выше, перемещением поршня 50, приводит к осевому перемещению сопрягающейся с ней зубчатой втулки 62 в переводнике 56 узла храпового механизма. В процессе этого верхний зубец 64 последовательно занимает позиции 64а, 64b, 64с, 64d, 64e, 64f, 64g, 64h, 64i и 64j. В конце концов, верхний зубец 64 приходит к своему заключительному положению 64k, соответствующему полностью закрытому положению или состоянию переводника 36 узла скользящей втулки. Кроме того, нижний зубец 66 движется последовательно между положениями 66а-66k. Когда зубец 66 находится у верхнего выступа 76, каналы 46 флюида совпадают по направлению с отверстиями 42 флюида, что создает положение полностью открытого прохода потока. Можно видеть, что опора нижнего зубца 66 на каждый следующий расположенный ниже выступ 72а, 72е приводит к постепенному понижению положения по оси зубчатой втулки 62 по отношению к элементам 58, 60 корпуса. Эти разные положения по оси приводят к разным с точки зрения регулирования расхода положениям или состояниям скользящей втулки 44 за счет изменения степени осевого перекрытия отверстий 42 флюида с каналами 46 флюида (см. фиг.2). Как показано на фиг.3А, проход для потока становится постепенно все меньше по мере перемещения нижнего зубца 66 от положения 66а до положения 66i и, в конечном счете, совсем перекрывается в положении 66k. При нахождении зубцов 64 и 66 в положениях 64k и 66k соответственно втулка 44 смещается вниз так, что каналы 46 флюида оказываются ниже уплотнения 43b и поток прерывается. За счет соответствующего выбора ступенчатого изменения между последовательными состояниями для перемещения скользящей втулки между этими последовательными состояниями может требоваться заранее известное количество рабочей текучей среды. В одном из вариантов выполнения изобретения величина перемещения и, следовательно, требуемое количество текучей среды подбирается таким образом, чтобы разница в перемещении между каждым из последовательных состояний была бы однозначной. При таком выборе количество текучей среды, требуемое для каждого перемещения, также однозначно, и тогда положение втулки может быть определено по количеству текучей среды, требуемой для перемещения втулки в это положение.
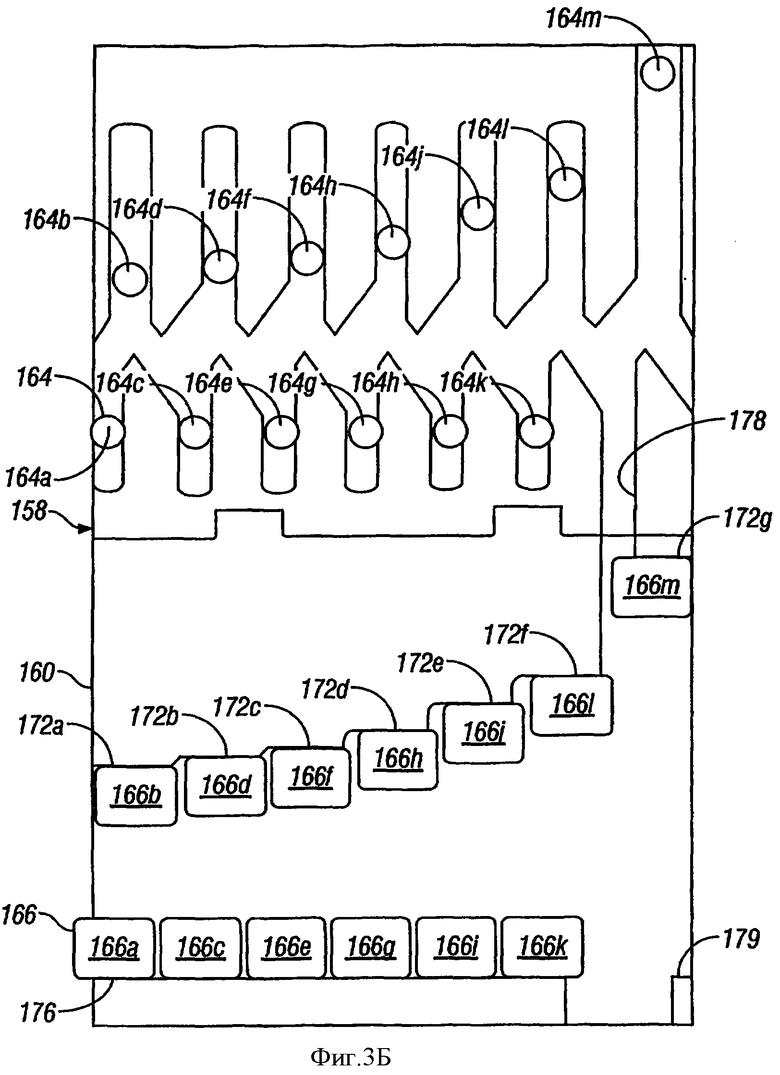
На фиг.3Б представлен другой вариант выполнения изобретения, в котором J-образные пазы ориентированы таким образом, что при работе устройства проход для потока постепенно увеличивается. Расположение J-образных пазов внутри корпусов 160 и 158 показано в "развернутом" виде. Как видно на фиг.3Б, верхний зубец 164 проходит через положения 164а-164m, в то время как нижний зубец 166 занимает положения 166а-166m соответственно. Нижний выступ 176 действует как ограничитель для нижнего зубца 166. Верхние выступы 172a-g образуют ступенчатую последовательность, связанную с величиной прохода для потока, формируемого взаимным расположением каналов 46 и отверстий 42 флюида во втулке 44, однако в отличие от фиг.3А, когда зубец 166 расположен у выступа 176, прямой путь для потока через отверстия 42 и каналы 46 флюида отсутствует, но каналы не находятся ниже уплотнения 43b. Поэтому имеется некоторая утечка в канал 48, обусловленная наличием зазоров между втулкой 44 и корпусом 38, что условно называют "диффузным положением". Как было показано в связи с фиг.3А, положение выступов 172a-g может быть выбрано таким образом, чтобы обеспечить однозначное определение положения втулки 44 в зависимости от количества текучей среды, требуемой для перемещения втулки 44 между последовательными положениями. Для перекрытия втулки 44 в конструкции, показанной на фиг.3Б, зубцы 164 и 166 передвигаются вниз по дорожкам 178 и 179 до тех пор, пока каналы 46 не окажутся ниже уплотнения 43b (см. фиг.2). Следует отметить, что в рамках настоящего изобретения могут быть использованы другие виды зубцов и храповых механизмов. На фиг.4 представлен график зависимости от времени давления, регистрируемого датчиком 82 давления. Ход графика отражает изменение давления текучей среды в линии 34а управления в процессе перемещения скользящей втулки 44. При приложении гидравлического давления к верхней приемной камере 52 давление текучей среды в линии 34а управления начнет повышаться, что отражено первым участком 90 графика. Давление текучей среды продолжит расти, пока силы сопротивления движению поршня, такие как внутреннее трение в устройстве, не будут преодолены. Как только трение будет преодолено, поршень 50 начнет двигаться и в результате выталкивать среду из нижней камеры 54. С этой точки втулка 44 движется вниз, рост давления в линии 34а управления прекращается, и оно остается в основном на постоянном уровне во время перемещения втулки. После перемещения втулки 44 в ее следующее положение или состояние, определяемое узлом 56 переводника храпового механизма, давление текучей среды в линии 34а снова начнет расти, так как втулка 44 больше не движется. Это отражено наклонным участком 94 графика на фиг.4. В конце концов, давление в линии 34а достигнет уровня, при котором давление насоса дойдет до уровня срыва работы насоса, или в альтернативе давление достигнет уровня его сброса в подающей линии.
За счет соответствующего выбора ступенчатых выступов на фиг.3А, ЗБ промежуток времени (x) для уровня давления, связанного с перемещением втулки (участок 92 на фиг.4), находится в определенном соотношении с конкретным перемещением между состояниями для устройства 26 для регулирования расхода. Например, перемещение устройства 26 из положения, при котором нижний зубец 66 находится в позиции 66b, в положение, при котором нижний зубец 66 находится в позиции 66c, займет меньше времени, чем если устройство перемещается из положения, при котором зубец 66 занимает позицию 66h, а затем перемещается в позицию 66i. Следовательно, измерение значения "x" отразит состояние, в которое перешло средство 26. В одном из вариантов выполнения изобретения величина "x" различна для каждого конкретного перемещения средства 26.
При рассмотрении фиг.2 и 5 следует отметить, что в процессе работы датчик 82 связан с линией управления 34а, через которую подается среда, для измерения уровня давления этой текучей среды в линии 34а. В одном из вариантов выполнения датчик 82 представляет собой датчик давления, физически помещенный на корпусе 38 устройства 26 для регулирования расхода или вблизи него с целью минимизации эффектов накопления текучей среды в линии 34а управления. В альтернативе датчик 82 может представлять собой датчик расхода, непосредственно измеряющий количество текучей среды, прошедшей через линию 34а управления в соответствующую камеру или из камеры устройства 26 для регулирования расхода. В одном из вариантов выполнения линия 84 включает электрический кабель и/или светопровод. Показания, регистрируемые датчиком 82, направляются через линию 84 передачи данных в станцию 32. В альтернативном варианте показания с датчика 82 могут предаваться беспроводным способом на поверхность с использованием, например, акустических и/или электромагнитных методов, известных в уровне техники. Хотя показано, что датчик соединен только с линией 34а управления, должно быть понятно, что датчики могут быть связаны или с линией 34а, или с линией 34b, или с ними обеими.
Станция 32 мониторинга и управления функционально включает гидравлическую систему для приведения в действие устройства для регулирования расхода и соответствующую электронную схему и компьютерное оборудование для питания скважинного датчика 82 и регистрации, обработки и отображения сигналов с него. В одном из вариантов выполнения в станции 32 мониторинга и управления осуществляется регулирование в системе подачи жидкости с использованием сигналов с датчика 82. Станция 32 мониторинга и регулирования содержит контроллер 201 насоса, регулирующий выход потока из насоса 202, на вход которого осуществляется подача текучей среды из источника 203. Текучая среда из насоса 202 приводит в действие скважинное средство 26. Кроме того, имеется процессор 204, обладающий памятью 205 и связанный с электронной схемой 206, обеспечивающей питание датчика 82 и интерфейсную связь с ним. Сигналы с датчика 82 воспринимаются электронной схемой 206 и затем передаются в процессор 204. Процессор 204 в соответствии с заложенной программой обеспечивает регистрацию и/или хранение данных об изменении давления во времени, получаемых с датчика 82, с использованием твердой копии 207, дисплея 208 и накопителя 209 (память большого объема). В одном из вариантов выполнения промежуток времени (x), связанный, как было описано ранее, с каждым перемещением втулки, может быть сохранен в памяти 205. Измеренный промежуток времени (x) сравнивается с занесенными в память уставками, и на основе этого сравнения определяется положение втулки. В другом варианте для каждого перемещения в память 205 заносится весь профиль изменения давления, и для определения положения втулки измеренный профиль сравнивается с ранее введенным в память. В альтернативном варианте гидравлической системой может управлять оператор через блок 200 ручного управления.
Хотя в описанном устройстве имеются сдвоенные гидравлические линии управления и сбалансированный поршень, для специалиста в данной области будет понятно, что настоящее устройство может охватывать и гидравлические системы с одной линией, в которых используются поршни с возможностью возвратного движения за счет пружины.
Для специалистов в данной области также будет понятно, что в приведенные в качестве примера устройства и варианты выполнения могут быть внесены многочисленные модификации и изменения и что рамки изобретения определяются только совокупностью признаков нижеследующей формулы изобретения и их любых эквивалентов.
Группа изобретений относится к гидравлическому управлению скважинными инструментами, в частности к способам и устройствам для определения положения/состояния таких гидроприводных средств. Скважинное устройство для регулирования расхода потока флюида из пласта в ствол скважины содержит клапанный элемент, выполненный с возможностью перемещения при нахождении в стволе скважины. Через линию текучей среды под давлением подается рабочая среда для перемещения клапанного элемента с возможностью пропускания флюида в ствол скважины. Скважинный датчик, связанный с линией текучей среды, обеспечивает определение положения клапанного элемента. Способ включает подачу текучей среды под давлением в средство регулирования расхода для перемещения регулирующего элемента этого средства в определенное состояние. Осуществляют измерение давления поданной текучей среды и соответствующий промежуток времени для перемещения средства регулирования расхода. Состояние устройства регулирования расхода определяется по измеренному давлению поданной текучей среды. Техническим результатом является повышение точности определения положения средства регулирования расхода. 4 н. и 16 з.п. ф-лы, 6 ил.
1. Скважинное устройство для регулирования расхода потока флюида из пласта в ствол скважины, содержащее клапанный элемент, выполненный с возможностью перемещения для регулирования потока при нахождении в стволе скважины, линию подачи рабочей текучей среды под давлением для перемещения клапанного элемента, скважинный датчик, связанный с линией подачи рабочей текучей среды, и контроллер, способный получать сигналы от датчика и включающий предварительно запрограммированные команды для регистрации результатов измерений датчика и соответствующего промежутка времени перемещения клапанного элемента.
2. Устройство по п.1, в котором клапанный элемент выполнен с возможностью перемещения в несколько положений.
3. Устройство по п.1, в котором датчик расположен в непосредственной близости от клапанного элемента и выбран из группы, включающей датчик давления и датчик расхода.
4. Устройство по п.1, в котором контроллер обеспечивает определение на основе полученных от датчика сигналов положения клапанного элемента.
5. Устройство по п.4, в котором в контроллер заложен сохраненный профиль давления, связанный с положением клапанного элемента, и контроллер обеспечивает сравнение измеренного давления с этим сохраненным профилем давления для определения положения клапанного элемента.
6. Устройство по п.2, содержащее первую и вторую камеры текучей среды, выполненные с возможностью совместного действия для ступенчатого перемещения клапанного элемента в несколько положений.
7. Устройство по п.2, в котором указанные несколько положений соответствуют нескольким J-образным пазам.
8. Устройство по п.4, в котором контроллер обеспечивает определение положения клапанного элемента путем сравнения сигналов от датчика с предварительно заданной уставкой, занесенной в память, связанную с контроллером.
9. Скважинное устройство для регулирования расхода, содержащее гидроприводной золотниковый клапан, действующий между первым положением, в котором он имеет первое состояние по отношению к потоку флюида, и вторым положением, в котором он имеет второе состояние по отношению к потоку флюида, гидравлическую линию управления, связанную в процессе работы с золотниковым клапаном с возможностью подачи гидравлической текучей среды для обеспечения перехода клапана между указанными состояниями, скважинный датчик давления, связанный в процессе работы с гидравлической линией управления с возможностью определения давления текучей среды в ней для указания положения золотникового клапана, и контроллер, способный получать сигналы от расположенного в скважине датчика давления и включающий предварительно запрограммированные команды для регистрации значений давления и соответствующего промежутка времени перемещения клапанного элемента.
10. Устройство по п.9, в котором датчик давления расположен в непосредственной близости от золотникового клапана.
11. Способ определения положения средства регулирования расхода внутри скважины, в котором осуществляют подачу текучей среды под давлением к средству регулирования расхода для перемещения регулирующего элемента этого средства в определенное состояние, измеряют давления подаваемой в скважину текучей среды, осуществляют регистрацию измеренного давления и соответствующего промежутка времени перемещения указанного регулирующего расход элемента и определяют положение средства регулирования расхода с использованием измеренного давления подаваемой текучей среды и указанного промежутка времени.
12. Способ по п.11, в котором используют расположенный на поверхности контроллер, определяющий положение средства регулирования расхода по измеренному давлению и указанному промежутку времени.
13. Способ по п.12, в котором сохраняют в контроллере профиль давления, связанного с перемещением регулирующего элемента, и обеспечивают сравнение измеренного давления с этим профилем давления для определения положения средства регулирования расхода.
14. Способ по п.11, в котором элемент регулирования расхода выполнен с возможностью перемещения в несколько положений.
15. Способ по п.14, в котором осуществляют определение каждого из указанных нескольких положений по профилю давления, связанному с каждым из этих положений.
16. Способ определения положения средства регулирования расхода внутри скважины, в котором связывают профиль давления с перемещением регулирующего средства, осуществляют измерение в скважине расхода текучей среды в канале гидравлического питания, сообщающемся со средством регулирования расхода, осуществляют регистрацию давления и соответствующего промежутка времени для перемещения средства регулирования расхода и определяют положение средства регулирования расхода по измеренному расходу текучей среды и указанному профилю давления.
17. Способ по п.16, в котором расход текучей среды измеряют датчиком, выбранным из группы, включающей датчик давления и датчик расхода.
18. Способ по п.16, в котором используют расположенный на поверхности контроллер, определяющий положение средства регулирования расхода по измеренному в скважине расходу текучей среды.
19. Способ по п.18, в котором сохраняют в контроллере профиль давления, связанного с перемещением регулирующего элемента.
20. Способ по п.16, в котором средство регулирования расхода имеет несколько положений, характеризующихся профилем давления, связанным с каждым из этих состояний.
| US 2003132006 A1, 17.07.2003 | |||
| Циркуляционный клапан | 1985 |
|
SU1266968A1 |
| ТРУБНЫЙ ИСПЫТАТЕЛЬНЫЙ КЛАПАН И СПОСОБ ИЗВЛЕЧЕНИЯ ИСПЫТАТЕЛЬНОЙ КОЛОННЫ ИЗ ПОСТОЯННОГО ПАКЕРА | 1992 |
|
RU2107806C1 |
| СИСТЕМА ДЛЯ ВВЕДЕНИЯ НАГНЕТАТЕЛЬНОЙ ТЕКУЧЕЙ СРЕДЫ В ПОТОК УГЛЕВОДОРОДНОЙ ЖИДКОСТИ | 1995 |
|
RU2130112C1 |
| УСТАНОВКА ДЛЯ ПЕРЕКАЧИВАНИЯ ГАЗОЖИДКОСТНОЙ СМЕСИ | 1999 |
|
RU2154199C1 |
| РЕГУЛЯТОР ПОТОКА ПРИ ДОБЫЧЕ НЕФТИ | 2001 |
|
RU2204701C2 |
| US 6199629 B1, 13.03.2001 | |||
| US 3993129 A, 23.11.1976. | |||

