Изобретение относится к радиотехнике, а именно к импульсной, электроизмерительной технике и к сетевым системам сбора данных, и служит для определения мест повреждения (ОМП) в сетях электропередачи и связи.
Известен локационный способ ОМП, который позволяет определять расстояние до повреждения в неразветвленной линии (см. международная заявка Soraghan J.J. Automatic fault location in cabling systems. Patent, IPN: WO 98/1370 (02.04.98); Шалыг Г.М. Способ определения расстояния до места повреждения линии электропередачи и связи. Патент №185405 (07.10.1966); патент RU 2269789 C1 (10.02.2006)). Постоянное совершенствование этого способа в течение нескольких десятилетий позволило выйти на точности, недостижимые другими методами. Локационный способ обеспечивает большой диапазон измеряемых расстояний низкую погрешность измерения. Но все это касается неразветвленных кабелей, проводов и т.д.
В сетях со сложной разветвленной топологией существует проблема, связанная с неоднозначностью определения повреждений, решение которой невозможно только на основе локационного импульсного зондирования с одного (ведущего) устройства.
Известен способ, который осуществляет мониторинг сети и использует данные рефлектометрии для определения наличия дефектов проводов и кабелей в сетях с разветвленной топологией (прототип изобретения, см. патент RU 2319972 C1 (20.03.2008), Карпов А.В., Закиров А.Н. Способ определения наличия дефектов проводов и кабелей в сегментах сетей с разветвленной топологией), и заключается в том, что ведущее оконечное оборудование осуществляет одновременно локационное зондирование и измерение фазы несущей, принятой от ведомого оконечного оборудования, данные заносят в память микроЭВМ, измеренное значение фазы и форму рефлектограммы сравнивают с предыдущими значениями и в случае изменения значения фазы или формы рефлектограммы определяют наличие или отсутствие повреждения в зондируемом сегменте. Недостатком этого способа является то, что:
- при измерении фазы несущей необходима точная синхронизация ведомых устройств с ведущим устройством;
- необходимы хранители времени, наличие которых приводит к необходимости их постоянного совмещения;
- измерение фазы сигнала с необходимой точностью из-за высокого уровня помех в сетях электропередачи очень затруднено.
Все вышеупомянутое неизбежно приведет к удорожанию всей системы диагностики электросети. Кроме того, описанный выше способ позволяет однозначно определить только наличие или отсутствие повреждения в зондируемом сегменте, но не конкретное местоположение повреждения в сети.
Задачей данного изобретения является определение местоположения повреждения в электрокабеле или проводе сети с разветвленной топологией за счет снятия неоднозначности при идентификации поврежденного сегмента. Задача решается тем, что ведущее устройство осуществляет предварительный сбор информации о целостности сегментов в контролируемом участке сети путем опроса ведомых устройств (сканирования сети), при этом ведущее устройство генерирует специализированный маркер (кадр СМ или сканирующий маркер) с пустым информационным полем близлежащему в сети ведомому устройству, которое в свою очередь предварительно меняет содержимое информационного поля кадра СМ уникальным для данного ведомого устройства кодом и передает его следующему в звене ведомому устройству, которое производит те же операции что и предыдущее ведомое устройство; описанный процесс передачи кадра СМ происходит вплоть до концевого в звене ведомого устройства n или до первого поврежденного сегмента, привязанного к определенному ведомому устройству i; далее, ведомые устройства n или i передают кадр СМ с образовавшимся к этому моменту информационным полем обратно ведущему устройству (так получается отражение кадра СМ) путем ретрансляции через те же промежуточные в звене ведомые устройства, а ведущее устройство принимает отраженный кадр СМ и заносит соответствующее информационное поле в память микроЭВМ, по которому определяют наличие или отсутствие повреждений в сегментах сети и расстояния до соответствующих сегментов (локализация мест повреждений) и в случае наличия повреждений ведущее устройство на основе данных сканирования осуществляет последовательное локационное зондирование поврежденных сегментов, принятые формы рефлектограмм заносят в память микроЭВМ и сравнивают с предыдущими значениями и в случае изменения формы рефлектограмм определяют конкретные местоположения повреждений в зондируемых сегментах сети.
Кроме того, перед передачей кадра СМ каждое ведомое устройство производит обновление содержимого информационного поля кадра СМ путем инкремента этого содержимого.
Ведущее устройство и ведомые устройства реализуют модемные функции с использованием 2-х каналов, при этом 1-й канал организуется в диапазоне частот F1 (канал «вниз») с произвольным методом модуляции, на которой реализуется передача кадра СМ и служебных данных от вышележащего ведомого устройства i-1 нижележащему i или от ведущего устройства L, а 2-й канал организуется в диапазоне частот F2 (канал «вверх»), не перекрывающийся с F1, с произвольным методом модуляции, на которой реализуется передача отраженного кадра СМ и служебных данных от нижележащего ведомого устройства i+1 вышележащему i или ведущему устройству. Канал «вверх» может быть организован в беспроводном канале, в этом случае отраженный кадр СМ передается непосредственно ведущему устройству, минуя ретрансляцию.
Собственные адреса ведомых устройств имеют длину в 2 бита и принимают одно из трех значений: 00, 01, 10 или 11 и, кроме того, в процессе конфигурации сети каждое ведомое устройство i приобретает номер маршрута k=1, 2..m, где m - общее количество маршрутов в контролируемой сети, или совокупность номеров k…k (для узлового ведомого устройства), где s количество присвоенных данному ведомому устройству маршрутов и k1<k2<…<kS при этом номер маршрута используется для обновления собственного адреса ведомого устройства. Передача кадра СМ узловыми ведомыми устройствами реализуется последовательно по всем маршрутам, начиная с маршрута, имеющего наименьший номер k1, при этом переход к опросу следующего маршрута происходит только после приема и сохранения соответствующего информационного поля отраженного кадра СМ, ретранслированного от соседнего нижележащего по соответствующему маршруту ведомого устройства, и после опроса всех соответствующих маршрутов узловое ведомое устройство формирует совокупное информационное поле отраженного кадра СМ, после чего сформированный отраженный кадр СМ ретранслируется соседнему вышележащему ведомому устройству.
Способ осуществляется на основе мониторинга сети, который производится циклически, с частотой 1 раз за большой интервал времени (например: минуту, час или сутки), или выборочно в любое время, в зависимости от вида запроса и/или при возникновении необходимости срочной передачи данных, что не будет влиять на выполнение основных функций сети. Цель сетевого мониторинга - локализация поврежденных сегментов в контролируемом участке сети. Сетевой мониторинг реализуется на основе принципа отражения от неоднородностей.
Система сетевого мониторинга состоит из трех основных элементов:
Ведущего устройства, Ведомого устройства, Маркера (фиг.1а, 1б, 2).
- Ведущее устройство предназначено для идентификации поврежденных сегментов в сети и определения конкретного местоположения повреждения в сети. Основные функции ведущего устройства:
а) модемная функция,
б) функция локатора,
в) функция генератора сканирующего маркера,
г) сбор, обработка и хранение информации относительно всех сегментов сети.
- Ведомые предназначены для решения задачи привязки к определенным сегментам сети, для определения факта наличия повреждения в соответствующих сегментах и, тем самым, локализации поврежденных сегментов для устранения неоднозначности результатов локационного зондирования. Основные функции ведомого устройства:
а) модемная функция,
б) функция ретранслятора сканирующего маркера,
в) функция отражателя сканирующего маркера,
г) функция идентификатора соответствующего привязанного сегмента сети.
- Сканирующий маркер является средством сканирования сети ведущим устройством. Основные свойства сканирующего маркера:
а) кадр с уникальной структурой, имеющий по крайне мере поле адреса, идентификационное поле, информационное поле, остальные поля могут быть добавлены при необходимости;
б) размер каждого поля при необходимости может быть от одного до нескольких бит;
в) в информационном поле формируются данные относительно наличия или отсутствия повреждений в сегментах сети посредством ведомых устройств, привязанных к соответствующим сегментам;
г) идентификационное поле необходимо для идентификации сканирующего маркера ведомыми устройствами;
д) поле адреса необходимо для осуществления адресации ведомых устройств в сети.
Совокупность ведомых устройств образует информационную сеть и находится в подчинении у одного ведущего устройства. Каждое ведомое устройство имеет свой уникальный адрес в сети. В сети с разветвленной топологией ведомые устройства располагаются друг за другом через известные для ведущего устройства расстояния, образуя разветвленные звенья, и связанные электрокабелем или проводом, являющийся каналом связи устройств, при этом отсутствуют кольцевые связи. Ведущее устройство связано электрокабелем или проводом с одним или более ведомыми устройствами при этом не образуются кольцевые связи.
В описанной выше системе сетевого мониторинга сегментом сети считается участок электрокабеля или провода между двумя близлежащими, связанными ведущим и ведомым или ведомыми устройствами.
Способ осуществляется следующим образом.
Для участка сети, не имеющей ответвления (фиг.1а), справедливо нижеследующее описание:
Ведущее устройство 1 (фиг.1a) генерирует сканирующий маркер (далее кадр СМ) с пустым информационным полем. Ведомое устройство 2 принимает кадр СМ от ведущего устройства и производит его адресацию соседнему нижележащему в звене ведомому устройству 3, которое в свою очередь адресует кадр СМ следующему соседнему нижележащему устройству и т.д. Перед адресацией каждое ведомое устройство меняет содержимое информационного поля кадра СМ уникальным для данного ведомого устройства кодом. Процесс адресации от вышележащего ведомого устройства нижележащему происходит вплоть до концевого в звене ведомого устройства n или до первого поврежденного сегмента, привязанного к определенному ведомому устройству i. Соответствующий сегмент будет считаться поврежденным, если будет отсутствовать надлежащая связь между ведомыми устройствами i и i+1. Решение о поврежденности соответствующего сегмента принимается вышележащим ведомым устройством i.
Далее, упомянутые выше ведомые устройства n или i передают кадр СМ с образовавшимся к этому моменту информационным полем обратно ведущему устройству 1 путем ретрансляции через промежуточные в звене ведомые устройства n-1…1 или i-1…1 соответственно. Таким образом, реализуется отражение кадра СМ от первого в звене поврежденного сегмента, если повреждения присутствуют или от конца линии, если повреждения отсутствуют. Теперь возможны две ситуации:
1) Ведущее устройство 1 принимает отраженный кадр СМ и по коду, содержащемся в его информационном поле определяет, что отражение кадра СМ произошло от концевого ведомого устройства n. В таком случае ведущее устройство 1 идентифицирует отсутствие поврежденных сегментов в сети и завершает цикл.
2) Ведущее устройство 1 принимает отраженный кадр СМ и по коду, содержащемся в его информационном поле определяет, что отражение кадра СМ произошло от промежуточного в звене ведомого устройства i. В таком случае ведущее устройство 1 идентифицирует наличие поврежденного сегмента в сети и по принятому коду определяет расстояние до соответствующего, привязанного к i, поврежденного сегмента, на основе которого производит локационное зондирование соответствующего поврежденного сегмента сети. Принятая рефлектограмма заносится в память микроЭВМ и сравнивается с предыдущими значениями. По результату сравнения определяется конкретное местоположение повреждения в поврежденном сегменте и на этом цикл завершается.
Перед передачей кадра СМ каждое ведомое устройство может производить обновление содержимого информационного поля кадра СМ путем простого инкремента этого содержимого. Таким образом, при помощи кадра СМ фактически осуществляться подсчет неповрежденных сегментов в линии, началом отсчета будет являться ведущее устройство 1. В таком случае порядковый номер, содержащийся в информационном поле отраженного кадра СМ, будет указывать на координату поврежденного сегмента.
Реализация модемных функций может быть организована с использованием 2-х каналов. 1-й канал организуется в диапазоне частот F1 с произвольным методом модуляции, на которой реализуется передача кадра СМ и служебных данных от вышележащего ведомого устройства i-1 нижележащему i или от ведущего устройства 1; 2-й канал организуется в диапазоне частот F2, не перекрывающейся с F1, с произвольным методом модуляции, на которой реализуется передача отраженного кадра СМ и служебных данных от нижележащего ведомого устройства i+1 вышележащему i или ведущему устройству 1. Диапазон частот F1 образует канал «вниз», диапазон частот F2 образует канал «вверх». Канал «вверх» может быть организован в беспроводном канале, тогда отраженный кадр СМ может передаваться непосредственно ведущему устройству 1, минуя ретрансляцию. В этом случае диапазоны частот F1 и F2 могут перекрываться.
Для упрощения адресации ведомых устройств в предлагаемой конфигурации сети изначально каждому ведомому устройству присваивается адрес, длиной в 2 бита и имеющий одно из трех значений: 1) 00, 2) 01, 3) 10 или 11. Если условно обозначить ведомое устройство, имеющее адрес 00 как 2, ведомое устройство, имеющее адрес 01 как 3, ведомое устройство, имеющее адрес 10 или 11 как 4, то расположение ведомых устройств в звене будет осуществляться как в примере на фиг.1б, где j, n=2, 3 или 4. Сущность метода адресации станет очевидным из следующих пунктов:
1) В памяти микроЭВМ ведомых устройств прописывается собственный адрес из ряда: 00, 01, 10 или 11 (в двоичном формате), на основе которых производится инициализация, конфигурация сети на этапе запуска.
2) При установке сети ведомые устройства располагаются строго в соответствии с собственными адресами в порядке возрастания адресов: 2-3-4-2 (фиг.1б). Началом отсчета считается ведущее устройство 1.
3) Адресное поле кадра СМ содержит только адрес источника и для примера на фиг.1б имеет длину в 2 бита, поэтому каждое ведомое устройство содержит в памяти микроЭВМ адреса соседнего вышележащего и нижележащего ведомого устройства, которые можно получить на основе собственного адреса ведомого устройства. С учетом введенного метода адресации в таблицу, приведенную ниже, сведены все возможные варианты адресации ведомых устройств в сети.
4) Ведомые устройства, имеющие одинаковые собственные адреса, устанавливаются на таком расстоянии друг от друга, чтобы уровень сигнала на входе приемника первого из упомянутых ведомых устройств при передаче сигнала от второго из упомянутых ведомых устройств оказывался ниже чувствительности приемника первого ведомого устройства. Это необходимо для исключения из процесса обмена данными между двумя соседними ведомыми устройствами всех остальных нижележащих и вышележащих ведомых устройств, в противном случае ухудшающих помеховую обстановку в канале.
Дальнейшее описание способа осуществляется с применением понятия маршрут. В данном случае маршрут k характеризует совокупность ведомых устройств, расположенных по одной линии. Началом линии считается ведущее устройство 1, концом - один из концевых ведомых устройств n в разветвленной сети (фиг.2).
Для участка сети, имеющей ответвления, справедливо нижеследующее описание.
В процессе конфигурации сети каждое ведомое устройство i, где i=2, 3 или 4, приобретает номер маршрута k=1, 2..m, где m - общее количество маршрутов в контролируемой сети, или совокупность номеров k1…kS, где s - количество присвоенных данному ведомому устройству маршрутов и k1<k2<…<kS.
Номер маршрута используется для обновления предыдущего собственного адреса. Новый собственный адрес может быть сформирован путем простого объединения приобретенного номера маршрута с предыдущим собственным адресом ведомого устройства и сохранен в памяти микроЭВМ ведомого устройства. Например, ведомое устройство 2 (фиг.2) будет иметь собственный адрес k10 или в двоичном формате при k1=2:1000.
Для реализации в сети с разветвленной топологией предлагаемого метода адресации в памяти микроЭВМ ведомых устройств хранится структура данных, представленная ниже в табличном виде для ведомого устройства 3 (фиг.2), все числа приведены в десятичном формате.
Количество строк в приведенной таблице маршрутов равно количеству маршрутов, присвоенных данному ведомому устройству. Ведомое устройство, содержащее более одного маршрута в таблице, является узловым элементом в сети и располагается в месте, где появляются ответвления, количество которых равно количеству маршрутов, пролегающих через данное ведомое устройство.
Первая колонка таблицы маршрутов содержит номера маршрутов, присвоенных данному ведомому устройству в процессе конфигурации. В колонке «адрес источника» хранятся адреса соседнего вышележащего (по каналу «вниз») и нижележащего (по каналу «вверх») ведомых устройств, расположенных по соответствующим маршрутам в сети. Данные в колонке «адрес источника» формируются путем объединения приобретенного номера маршрута с собственными адресами соседнего вышележащего и нижележащего ведомого устройства. В колонке «информация» хранятся информационные поля отраженного кадра СМ для соответствующих маршрутов.
Собственный адрес узлового ведомого устройства формируется из номера маршрута, имеющего наименьшее значение. Например, узловое ведомое устройство 3 (фиг.2) будет иметь собственный адрес k11.
Если ведомое устройство не является узловым и через него пролегает ряд маршрутов, имеющих номера k1…kS, то данному ведомому устройству присваивается номер маршрута, имеющего наименьшее значение. Примером является ведомое устройство 2 слева (фиг.2), его номер маршрута равен k1.
Адресация кадра СМ узловыми ведомыми устройствами реализуется последовательно по всем маршрутам из таблицы маршрутов, начиная с маршрута, имеющего наименьший номер k1, при этом переход к опросу следующего в таблице маршрута происходит только после приема и сохранения в соответствующей информационной ячейке информационного поля xk отраженного кадра СМ, ретранслированного от соседнего нижележащего по соответствующему маршруту ведомого устройства.
После заполнения информационной колонки таблицы маршрутов узловое ведомое устройство формирует совокупное информационное поле отраженного кадра СМ путем простого объединения содержимого всех информационных ячеек упомянутой таблицы маршрутов, т.е. xk1xk2…xk(S-1)xkS, после чего сформированный отраженный кадр СМ ретранслируется соседнему вышележащему ведомому устройству (ведомое устройство 2 слева на фиг.2).
Ведущее устройство 1 принимает и сохраняет в памяти микроЭВМ отраженный кадр СМ, информационное поле которого содержит значение х1…xk1xk2…xk(S-1)xkS…xm, где каждое х будет содержать координату поврежденного сегмента по определенному маршруту. Далее, ведущее устройство 1 производит разбиение принятого значения информационного поля на m частей так, чтобы 1-я часть содержала х1, 2-я часть содержала х2, …, m-я часть содержала xm, затем по коду, содержащемуся в каждой части, идентифицирует наличие или отсутствие поврежденного сегмента в каждом из m маршрутов и в случае наличия поврежденных сегментов по кодам х из соответствующих упомянутых частей вычисляет расстояния до поврежденных сегментов.
Ведущее устройство 1 на основе данных, принятых от отраженного кадра СМ, производит последовательное локационное зондирование поврежденных сегментов сети. Принятые рефлектограммы заносятся в память микроЭВМ и сравниваются с предыдущими значениями для соответствующих сегментов. По результатам сравнения определяется конкретное местоположение повреждения в поврежденных сегментах и на этом цикл завершается.
Таким образом, предложенный способ на основе описанного выше сетевого мониторинга позволяет предварительно устранить неоднозначность результатов локационного зондирования разветвленных сетей путем механизма локализации поврежденных сегментов, а затем однозначно определить конкретное местоположение повреждения в сети путем локационного зондирования локализованных ранее поврежденных сегментов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ ДЕФЕКТОВ ПРОВОДОВ И КАБЕЛЕЙ В СЕГМЕНТАХ СЕТЕЙ С РАЗВЕТВЛЕННОЙ ТОПОЛОГИЕЙ | 2006 |
|
RU2319972C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОВРЕЖДЕННОГО УЧАСТКА И ТИПА ПОВРЕЖДЕНИЯ В ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СЕТИ С РАЗВЕТВЛЕННОЙ ТОПОЛОГИЕЙ | 2011 |
|
RU2455654C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ С ДРЕВОВИДНОЙ СТРУКТУРОЙ | 2012 |
|
RU2511640C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОПОЛОГИИ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2017 |
|
RU2656004C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ РАЗВЕТВЛЕННОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ С НЕСКОЛЬКИМИ ИСТОЧНИКАМИ ПИТАНИЯ | 2010 |
|
RU2464582C2 |
| ЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ НА ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ С ОТПАЙКОЙ | 2022 |
|
RU2783502C1 |
| СПОСОБ РАБОТЫ ЛОКАЛЬНОЙ СЕТИ | 2008 |
|
RU2362206C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТ ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ РАСПРЕДЕЛИТЕЛЬНЫХ СЕТЕЙ | 2005 |
|
RU2292559C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2474831C1 |
| Способ определения расстояния до неоднородности или повреждения двухпроводной линии по ее рефлектограмме | 2017 |
|
RU2660222C1 |


Изобретение относится к электроизмерительной технике и предназначено для определения мест повреждения (ОМП) в сетях электропередачи и связи. Сущность: ведущее устройство осуществляет предварительный сбор информации о целостности сегментов в контролируемом участке сети путем опроса ведомых устройств (сканирования сети). Результаты сканирования заносят в память микроЭВМ, по которым определяют наличие или отсутствие повреждений в сегментах сети и расстояния до соответствующих сегментов (локализация мест повреждений). В случае наличия повреждений ведущее устройство осуществляет последовательное локационное зондирование поврежденных сегментов. Принятые формы рефлектограмм заносят в память микроЭВМ и сравнивают с предыдущими значениями. В случае изменения формы рефлектограмм определяют местоположения повреждений в зондируемых сегментах сети. Технический результат: снятие неоднозначности при идентификации поврежденного сегмента 6 з.п. ф-лы, 2 табл, 2 ил.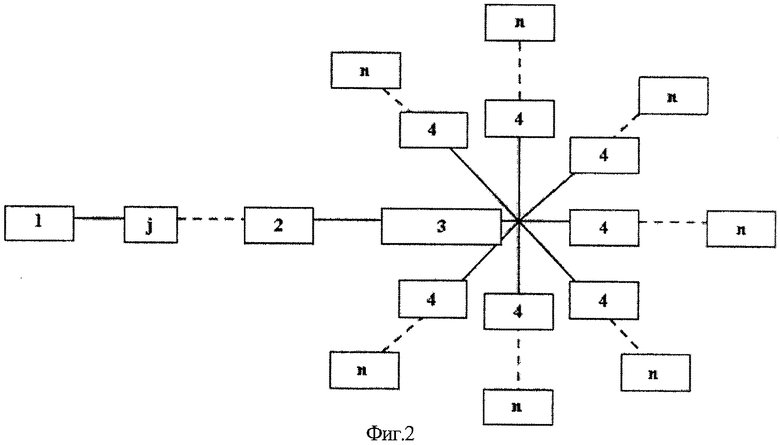
1. Способ определения местоположения повреждений в сетях с разветвленной топологией, основанный на мониторинге сети и использовании данных рефлектометрии, измеряемых ведущим устройством в сети, отличающийся тем, что ведущее устройство осуществляет предварительный сбор информации о целостности сегментов в контролируемом участке сети путем опроса ведомых устройств (сканирования сети), при этом ведущее устройство генерирует сканирующий маркер (кадр СМ) с пустым информационным полем близлежащему в сети ведомому устройству, которое в свою очередь предварительно меняет содержимое информационного поля кадра СМ уникальным для данного ведомого устройства кодом и передает его следующему в звене ведомому устройству, которое производит те же операции, что и предыдущее ведомое устройство; описанный процесс передачи кадра СМ происходит вплоть до концевого в звене ведомого устройства n или до первого поврежденного сегмента, привязанного к определенному ведомому устройству i; далее ведомые устройства n или i передают кадр СМ с образовавшимся к этому моменту информационным полем обратно ведущему устройству (отражение кадра СМ) путем ретрансляции через те же промежуточные в звене ведомые устройства, а ведущее устройство принимает отраженный кадр СМ и заносит соответствующее информационное поле в память микроЭВМ, по которому определяют наличие или отсутствие повреждений в сегментах сети и расстояния до соответствующих сегментов (локализация мест повреждений) и в случае наличия повреждений ведущее устройство на основе данных сканирования осуществляет последовательное локационное зондирование поврежденных сегментов, принятые формы рефлектограмм заносят в память микроЭВМ и сравнивают с предыдущими значениями и в случае изменения формы рефлектограмм определяют конкретные местоположения повреждений в зондируемых сегментах сети.
2. Способ по п.1, отличающийся тем, что перед передачей кадра СМ каждое ведомое устройство производит обновление содержимого информационного поля кадра СМ путем простого инкремента этого содержимого.
3. Способ по п.2, отличающийся тем, что ведущее устройство и ведомые устройства реализуют модемные функции с использованием 2-х каналов, при этом 1-й канал организуется в диапазоне частот F1 (канал «вниз») с произвольным методом модуляции, на которой реализуется передача кадра СМ и служебных данных от вышележащего ведомого устройства i-1 нижележащему i или от ведущего устройства, а 2-й канал организуется в диапазоне частот F2 (канал «вверх»), не перекрывающийся с F1, с произвольным методом модуляции, на которой реализуется передача отраженного кадра СМ и служебных данных от нижележащего ведомого устройства i+1 вышележащему i или ведущему устройству.
4. Способ по п.3, отличающийся тем, что канал «вверх» организуется в беспроводном канале и отраженный кадр СМ передается непосредственно ведущему устройству, минуя ретрансляцию.
5. Способ по п.3, отличающийся тем, что изначально каждому ведомому устройству присваивается собственный адрес длиной в 2 бита и имеющий одно из трех значений: 00, 01, 10 или 11.
6. Способ по п.5, отличающийся тем, что в процессе конфигурации сети каждое ведомое устройство i приобретает номер маршрута k=1, 2…m, где m - общее количество маршрутов в контролируемой сети, или совокупность номеров k1…ks для узлового ведомого устройства, где s - количество присвоенных данному ведомому устройству маршрутов и k1<k2<…<ks, при этом номер маршрута используется для обновления предыдущего собственного адреса ведомого устройства.
7. Способ по п.6, отличающийся тем, что передача кадра СМ узловыми ведомыми устройствами реализуется последовательно по всем маршрутам, начиная с маршрута, имеющего наименьший номер, при этом переход к опросу следующего маршрута происходит только после приема и сохранения соответствующего информационного поля отраженного кадра СМ, ретранслированного от соседнего нижележащего по соответствующему маршруту ведомого устройства, и после опроса всех соответствующих маршрутов узловое ведомое устройство формирует совокупное информационное поле отраженного кадра СМ, после чего сформированный отраженный кадр СМ ретранслируется соседнему вышележащему ведомому устройству.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ ДЕФЕКТОВ ПРОВОДОВ И КАБЕЛЕЙ В СЕГМЕНТАХ СЕТЕЙ С РАЗВЕТВЛЕННОЙ ТОПОЛОГИЕЙ | 2006 |
|
RU2319972C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТ ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ РАСПРЕДЕЛИТЕЛЬНЫХ СЕТЕЙ | 2005 |
|
RU2292559C1 |
| US 7362714 B2, 22.04.2008 | |||
| US 7283480 В1, 16.10.2007. | |||

