Группа изобретений относится к электроизмерительной технике и средствам диагностирования и может быть применена для определения расстояния до мест повреждения линий электропередачи и связи, в частности для разветвленных силовых кабельных линий произвольной конфигурации.
Для повышения качества обслуживания потребителя особое значение приобретает быстрота, точность и однозначность определения места повреждения, особенно в том случае, когда визуальный контроль линий затруднителен или невозможен, например при подземной дислокации кабелей связи или электропередачи.
Известен способ определения расстояния до места повреждения в распределительных силовых сетях [1], который основан на измерении времени между моментом посылки в линию зондирующего электрического импульса и моментом прихода в начало линии импульса, отраженного от места повреждения. Послав в линию импульс, измеряют интервал Δt - время двойного пробега этого импульса до места повреждения. Расстояние до места повреждения находят как L=V·Δt/2, где V - скорость распространения импульса по линии. (Для обеспечения целостности изложения в дальнейшем тексте приняты следующие обозначения: L - длина линии, длина участка линии, Lx - расстояние до места повреждения, Δt - интервал времени между посылкой зондирующего сигнала и возвратом отраженного, τ - длительность зондирующего сигнала, V - скорость распространения электромагнитной волны в данном участке линии, δ - ошибка измерения, q - отношение сигнал/шум, Тз - время задержки сигнала, А - амплитуда.)
В настоящее время локационный способ определения места повреждения линий электропередачи и связи является наиболее распространенным [2]. Постоянное совершенствование в течение нескольких десятилетий этого способа, применительно к обособленным линиям, позволило достичь точности локации, недостижимой другими методами (см., например, патенты RU 2269789 C1, RU 2398244 С2, кл. G01R 31/11). Недостатками этих способов является то, что они применимы только к неразветвленным линиям; для разветвленных линий сложной топологии точность этих способов оказывается недостаточной.
Для таких линий определение места повреждения существенно усложняется. В этом случае простая локация не дает однозначного указания на ответвление, в котором находится поврежденный участок (локализация места повреждений), так как все отклики на зондирующее воздействие формируются на единой временной (или частотной) оси без разделения по ответвлениям. Для таких линий применяют модификации локационного способа, позволяющие с некоторой достоверностью судить о месте локализации повреждения.
Известен способ определения наличия повреждений кабельных систем с разветвленной топологией, основанный на использовании данных рефлектометрии (см. Soraghan J.J. et al., Automatic fault location in cabling systems. Patent US No.: 6385561 Bl, Int. Cl6: G01M 11/00, G01R 31/11; Date 07.05.2002).
В этом способе осуществляется сравнение составного, отраженного от неоднородностей, сигнала в неповрежденном кабеле с аналогичным сигналом в поврежденном. Точность интерпретации данных рефлектометрии повышается за счет использования априорной информации о топологии сети и откликах в неповрежденном состоянии. На основе этих априорных данных осуществляется адаптивная фильтрация и последовательное сравнение составного отраженного сигнала.
Недостатком этого способа является то, что только по изменениям откликов на зондирующие сигналы невозможно устранить неоднозначность локализации в линиях с произвольной топологией и, вследствие этого - точность способа будет невысока в случаях постоянного переключения нагрузок и ответвлений.
Известен также способ определения местоположения повреждений в сетях с разветвленной топологией (Патент RU 2386974 С1; кл. G01R 31/11; опубл. 20.04.2010 г.), в котором ведущее устройство осуществляет предварительный сбор информации о целостности участков контролируемой сети, посылая ведомым устройствам по той же сети кодированное информационное сообщение (сканирующий маркер или "кадр СМ"), которые, в свою очередь, меняют определенным образом содержимое информационного поля кадра СМ, и передает его следующему в звене ведомому устройству, вплоть до концевого в звене ведомого устройства или до первого поврежденного участка сети. На основании информации, полученной ведущим устройством после возврата в него кадра СМ, делается вывод об исправности или неисправности того или иного участка сети и осуществляется ее импульсное зондирование. По полученным данным делается вывод о локализации участка неисправности и производится расчет расстояния до места повреждения.
Этот способ применим к сети с однородными, идеально согласованными по границам участками, длины которых L существенно больше, чем половина произведения длительности τ передаваемого информационного сообщения (СМ) на скорость его распространения V по участку:

причем то же самое ограничение распространяется и на расстояние до ближайшей к передатчику неоднородности участка линии.
Если это условие будет нарушено, то отраженный от любой неоднородности, или от границ участка, кадр информационного сообщения на входе в приемное устройство может сложиться сам с собой, что приведет к искажению информации, передаваемой в информационном сообщении, вплоть до полного ее уничтожения. От искажения передаваемой информации, возникающего в результате сложения двух (или более) идентичных кадров, при произвольном временном сдвиге последних, не защищают даже усовершенствованные методы модуляции сигнала и способы его входной фильтрации.
Реальная линия распределительной сети состоит из множества различного типа воздушных и/или кабельных секций (участков), то есть существенно неоднородна, причем длины участков сети могут быть и меньше, чем в указанном ограничении. Распространяющийся по линиям сигнал сильно искажается на неоднородностях, связанных с отводами и нагрузками линий, а также наличием по трассе соединительных муфт. При этом каждая неоднородность порождает многократные отражения посланного информационного сообщения, что делает дешифровку этого сообщения сомнительной, а порой и совсем невозможной.
Таким образом, к недостаткам данного способа следует отнести то, что применительно к реальным линиям произвольной конфигурации, этот способ может привести к неверной идентификации поврежденного участка или не идентифицировать его вообще.
Наиболее близок по технической сути к заявляемому решению известный способ определения мест повреждений линий электропередачи и связи и устройство для его осуществления (Патент RU 2400765 С2, кл. G01R 31/11, публ. 27.09.2010 г.), принятый в данной заявке за прототип.
Способ заключается в посылке в линию зондирующих импульсов напряжения с время-частотной модуляцией, приеме отраженных импульсов и измерениях временных задержек отраженных импульсов относительно зондирующих. При этом фиксируют массив демодулированных отраженных сигналов, полученных с неповрежденной линии, в виде электронного образа линии. Проводят автокорреляционную обработку, спектральный анализ и определяют частоты, соответствующие импульсам, отраженным от естественных неоднородностей. Записывают значения частот и соответствующих им расстояний до естественных неоднородностей в виде реперных точек. Для обнаружения повреждения отраженные демодулированные импульсы от естественных неоднородностей и неоднородности, возникшей при повреждении линии, вычитают из зафиксированных в электронном образе линии. Вывод о повреждении линии делают при наличии разностных сигналов. Подвергают разностный сигнал автокорреляционной обработке и спектральному анализу и определяют частоту, соответствующую координате повреждения, а расстояние до места повреждения определяют по этой частоте и реперным точкам. Измерения временных задержек отраженных сигналов осуществляется на основе частотного сдвига отраженного сигнала относительно опорного. В способе предусмотрена передача информации о повреждении и расстоянии до него в диспетчерский центр.
Основным достоинством данного способа, что и предопределило его выбор в качестве прототипа, является наличие операций циклического зондирования неповрежденной линии, хранения и постоянного обновления образов линии, а также сравнения полученного образа с хранимым с последующим выявлением на этой основе существенных отличий при возникновении повреждений. Передача полученных данных на диспетчерский пункт предполагает возможность их последующего анализа на ЭВМ пункта и оперативного вмешательства для восстановления работоспособности линии.
К основным недостаткам этого способа, так же, как и ранее рассмотренных, относятся трудности в однозначном определении поврежденного участка разветвленной линии при наличии в ней параллельных участков, то есть точность локализации неисправности и определения расстояния до повреждения применительно к разветвленным линиям в данном способе недостаточна. (Авторы способа используют в описании термин "разветвленные линии", но этот термин употребляется ими в смысле линий с ответвлениями, причем неисправности самих ответвлений из рассмотрения полностью исключены.)
К другим недостаткам этого способа относятся:
Ограниченность применения (как и способа по патенту RU 2386974) там, где удвоенное время прохождения по участку с неоднородностями посылаемого сигнала соизмерима с его длительностью. Применение линейной время-частотной модуляции предполагает использование зондирующего импульса значительной длительности и поэтому на несогласованных участках длиною меньшей, чем указано в ограничении (1), теряется однозначность в определении расстояния до возникшего повреждения.
Проиллюстрируем это утверждение. Временной интервал между зондирующим и отраженным сигналом в этом способе определяется опосредовано через измерение их частотного сдвига. При нарушении условия (1) на входе приемника будут одновременно присутствовать сигналы, отраженные, по крайней мере, от двух неоднородностей - от существующей естественной и от возникшей в результате повреждения линии. При этом разностные частоты будут возникать не только при взаимодействии отражений с опорным сигналом, но и за счет взаимодействия отраженных сигналов между собой, то есть на коротком участке с неоднородностями при возникновении повреждения возникает не одна дополнительная разностная частота, а целый спектр этих частот. Причем дополнительные частоты, в зависимости от взаимоположения естественной и возникшей неоднородностей, могут располагаться на частотной характеристике участка как дальше, так и ближе к началу координат, чем частота, соответствующая повреждению. Значения дополнительных частот являются разностной функцией расстояний до повреждения и до реперных точек и поэтому заранее неизвестны. А так как образ участка строится на основе амплитудно-частотных характеристик и в нем в явной форме отсутствует временной параметр, то судить о том, какой из сигналов пришел раньше, в этом случае представляется затруднительным. Поэтому разностная частота, являющаяся результатом взаимодействия двух отражений и расположенная, например, ближе к началу координат по частотной оси, может быть принята за частоту повреждения.
Таким образом, при нарушении указанного условия, возможна ситуация когда расстояние до повреждения по способу-прототипу будет определено неточно, что ограничивает его применение в неоднородных линиях с участками небольшой длины, к которым, как уже упоминалось, относятся и распределительные силовые кабельные линии.
К тому же, линии этого рода обладают сравнительно узкой полосой пропускания (порядка 2 МГц), что также серьезно ограничивает возможность применения сигнала с время-частотной модуляцией.
Существует еще одна проблема, решение которой затруднительно при использовании время-частотной модуляции зондирующего сигнала. При проведении зондирования "горячей" (то есть находящейся под напряжением) поврежденной линии не исключена ситуация возникновения в месте повреждения дугового разряда, который, совместно с реактивностями самой линии, может генерировать частоты из диапазона того же зондирующего сигнала [3]. Эти частоты непредсказуемы по спектру. Достигнув приемника, они "смажут" всю спектральную картину участка линии, не соответствуя ранее записанному частотному образу неповрежденной линии, располагаясь на частотной оси не только после, но и до действительного расположения частоты места повреждения. Это приведет к неправильному анализу и непредсказуемому результату при расчете расстояния до места повреждения линии.
Другими словами, использование данного способа для линий, находящихся под рабочим напряжением, сужает возможности в определении некоторых типов повреждений, ограничивая или совсем исключая повреждения в виде коротких замыканий, что негативно влияет на точность определения места повреждения линии.
Известно устройство для реализации известного способа (Патент RU 2269789 С1, кл. G01R 31/11, публ. 2006 г.), которое содержит соединенные между собой генератор зондирующих импульсов, вычислительный блок, приемник и блок индикации. При этом генератор зондирующих импульсов имеет блок памяти, цифроаналоговый преобразователь (ЦАП) и усилитель мощности, а приемник содержит смеситель, фильтр нижних частот, аналого-цифровой преобразователь.
Это устройство имеет недостаточную однозначность и точность определения места повреждения разветвленных линий сложной топологии.
Известно также устройство для осуществления известного способа определения мест повреждений линий электропередачи и связи (патент RU 2400765 С2, кл. G01R 31/11, публ. 27.09.2010 г.), которое содержит генератор зондирующих импульсов, вычислительный блок, имеющий в своем составе процессор, приемник, снабженный аналого-цифровым преобразователем, коммутатор, направленный ответвитель и блок передачи информации, вход которого соединен с выходом вычислительного блока.
Его основным недостатком является отсутствие синхронизации и возможности управления устройством из диспетчерского пункта, являющегося центром анализа и обработки поступающей информации о работе линии и смежных с ней систем. Этот недостаток приводит к автономной работе устройства, дистанционно повлиять на которую в нештатной ситуации невозможно. Поэтому снижается оперативность и достоверность получаемых данных о повреждении, вплоть до длительного игнорирования факта его возникновения, если заданная устройству периодичность зондирования линии окажется недостаточной.
Отсутствие синхронизации из единого центра не дает возможности использования двух или многостороннего зондирования, которое в условиях разветвленных линий сложной конфигурации повышает степень однозначности локализации места повреждения и увеличивает точность определения расстояния до него. При отсутствии синхронизации процессоры автономных устройств разойдутся во времени, что может привести к одновременной посылке в линию двух зондирующих импульсов с разных сторон и получению неточных и недостоверных результатов.
Кроме того, на диспетчерском пункте хранится информация не только о работе контролируемой линии, но и о состоянии системы в целом. Поэтому при возникновении первых признаков нештатной работы системы (таких, например, как перенапряжения сети или сбои в работе соседних устройств) наличие возможности оперативного управления устройством (например, команда на изменение периодичности зондирования) может способствовать положительному развитию ситуации. В этом случае многократное дублирование измерений и их сопоставление зачастую позволяет увидеть процесс в динамике и дает возможность достаточно точно установить еще развивающееся повреждение, незаметное при однократном измерении.
Существуют и другие недостатки данного устройства, связанные в основном с время-частотным характером модуляции сигнала. Некоторые из них проявляются на длинах участков линий, соизмеримых с временем прохождения по ним зондирующего импульса, остальные - при зондировании линии в "горячем режиме". Так, в первом случае наложение отражений сигнала самих на себя существенно снижает точность и однозначность определения места возникновения повреждения, во втором случае, в результате возникновения дугового разряда, сильно искажается спектральный состав отраженного сигнала.
Кроме того, при время-частотной модуляции входные фильтры приемника должны пропускать широкополосный сигнал, что затрудняет применение эффективной фильтрации шумов и снижает достоверность локализации и точность определения места повреждения.
Приведенный анализ уровня техники свидетельствует о том, что вышеперечисленные способы и устройства, включая способ и устройство по патенту RU 2400765, не обеспечивают необходимой точности в локализации места и определении расстояния до повреждений разветвленной линии произвольной конфигурации.
Задачей данной группы изобретений является повышение точности локализации поврежденного участка и определения расстояния до места повреждения применительно к неоднородным разветвленным линиям электропередачи и связи произвольной конфигурации, в частности к распределительным силовым линиям.
Технический результат, который может быть получен при реализации заявленной группы изобретений, заключается в достижении высокой точности измерения расстояния до места повреждения сложных неоднородных разветвленных линий произвольной конфигурации, а также в возможности автоматизации процесса диагностирования таких линий и сокращении времени обнаружения и устранения их неисправностей.
Поставленная задача решается тем, что в предлагаемом способе определения мест повреждений линий электропередачи и связи в линию посылают зондирующие импульсы напряжения, принимают отраженные импульсы с последующей их фильтрацией, анализом и измерениями временных задержек отраженных импульсов относительно зондирующих, на основании которых определяют расстояния до неоднородностей, фиксируют массив отраженных сигналов, полученных с неповрежденной линии в виде электронного образа линии, производят автокорреляционную обработку, расстояния до естественных неоднородностей записывают в виде реперных точек, передают эту информацию в единый центр и при обнаружении повреждения линии рассчитывают расстояние до места повреждения, процесс посылки зондирующих импульсов напряжения и приема отраженных импульсов осуществляют с двух противоположных концов участков линии поочередно. Массив отраженных сигналов фиксируют для участков линии, причем расстояния до неоднородностей записывают для участков линии в виде цифровой информации, которую снабжают метками, уникальными для каждого из возможных источников этой информации, и поочередно передают в единый центр, где ее хранят по крайней мере до получения обновленной информации из того же источника, а для обнаружения поврежденного участка полученную информацию о расстоянии до естественных неоднородностей и до неоднородности, возникшей при повреждении участка линии, подвергают автокорреляционному сравнению с предыдущей информацией из того же источника. При наличии некоррелирующих расстояний определяют поврежденный участок и предварительные расстояния до места повреждения Lx1 и Lx2, определенные с двух концов этого участка, причем уточненное расстояние до места повреждения Lx'K от любого из концов, К=1÷2, участка рассчитывают по формуле:
 ,
,
где L известная полная длина этого участка линии, м, а очередность процесса посылки и приема импульсов с концов участков линии и передачи информации в единый центр синхронизируют по синхропакетам, которые принимают из этого центра.
Преимущество способа заключается в использовании двусторонней локации участков линии и передаче результатов, снабженных метками источника информации, в единый центр обработки, где и производится анализ состояния контролируемой линии. Для устранения взаимного наложения сигналов от разных источников для них устанавливается определенная очередность процесса посылки зондирующих импульсов и передачи информации, которая синхронизируется из единого центра.
Такой способ зондирования линии полностью устраняет неоднозначность локализации повреждения, так как по информации, полученной с двух концов поврежденного участка, этот участок однозначно идентифицируется, в т.ч. для разветвленных неоднородных линий с закольцовкой. Предложенный способ также повышает точность определения расстояния до места повреждения.
Ошибка определения дальности при локации места повреждения зависит от ошибок измерения скорости распространения сигнала и времени его запаздывания, поэтому повышение точности измерения расстояния непосредственно связано с устранением влияния неточности в определении фазовой скорости волны в линии и уменьшением ошибок измерения времени запаздывания.
Предположим, что точное значение фазовой скорости распространения электромагнитной волны в данном участке, в данный период, нам неизвестно и поэтому предварительные расстояния до места повреждения, полученные с двух противоположных концов поврежденного участка Lx1 и Lx2, измерены с ошибками - δLx1 и δLx2 соответственно. Отметим, что в силу равенства скоростей распространения волны в двух ветвях участка линии (участок, как правило, не выполняют из проводников с разными характеристиками) ошибки измерения длины будут пропорциональны самому истинному значению этой длины  . To есть эти ошибки можно представить как
. To есть эти ошибки можно представить как  и
и  , полагая δ погонной ошибкой измерения, связанной с неточным определением скорости распространения. Подставляя предварительные, ошибочные значения длин
, полагая δ погонной ошибкой измерения, связанной с неточным определением скорости распространения. Подставляя предварительные, ошибочные значения длин  и
и  в приведенную выше формулу, после группировки и сокращения получим:
в приведенную выше формулу, после группировки и сокращения получим:
 .
.
Учитывая, что  , после сокращения получаем тождество, которое доказывает, что даже при большой неточности определения скорости распространения волны в данном участке линии, в случае использования предложенного способа, можно получить точное расстояние до места повреждения. Обобщая, заметим, что при использовании данного способа вообще нет необходимости в определении скоростей распространения зондирующего импульса в участках контролируемой линии, а предварительные длины до места повреждения могут быть определены в любых (но одинаковых) единицах измерения.
, после сокращения получаем тождество, которое доказывает, что даже при большой неточности определения скорости распространения волны в данном участке линии, в случае использования предложенного способа, можно получить точное расстояние до места повреждения. Обобщая, заметим, что при использовании данного способа вообще нет необходимости в определении скоростей распространения зондирующего импульса в участках контролируемой линии, а предварительные длины до места повреждения могут быть определены в любых (но одинаковых) единицах измерения.
Распространяя приведенные выше рассуждения на все систематические ошибки измерений (например, на ошибки измерения временных интервалов), можно констатировать, что ошибки, пропорциональные самой измеряемой величине (например, неточность используемых эталонных единиц времени), никак не влияют на точность получаемых результатов. Единственное, что может оказать негативное влияние на точность проводимых измерений, это несистематические ошибки, присущие каждому мерительному инструменту индивидуально. Но при использовании единой методики, одинаковой аппаратуры и при проведении измерений с незначительным интервалом (доли миллисекунд) трудно ожидать, что параметры линии и аппаратуры изменятся сколь-нибудь существенно. Поэтому при исправности аппаратуры мы вправе предполагать незначительность влияния несистематических ошибок на получаемый результат и их несоизмеримость с ошибками, рассмотренными ранее.
То есть можно утверждать, что использование предложенного способа существенно снижает уровень ошибок измерения, повышая тем самым точность определения расстояния до места повреждения неоднородных линий сложной и разветвленной топологии.
Повышение точности определения расстояния до места повреждения и однозначности локализации участка неоднородных линий произвольной конфигурации достигается и тем, что в указанном способе массив отраженных сигналов для участков линии подвергают амплитудному ограничению снизу по уровню, который предустанавливают с превышением среднего уровня шумов в участке линии, но ниже минимального уровня отражений от естественных неоднородностей, затем массив переводят в пакет униполярных импульсов фиксированной амплитуды, а расстояния до естественных неоднородностей и предварительные расстояния до места повреждения определяют на основании интервалов времени от посылки зондирующего импульса и до прихода переднего фронта очередного импульса пакета.
Сущность этого дополнения к основному способу сводится к тому, что для линий с относительно короткими участками, по вышеуказанным причинам, недопустимо использование протяженных зондирующих импульсов, время прохождения которых по участку (или до его неоднородностей) соизмеримо с длительностью самого импульса (см. ограничение (1)).
Среднеквадратичная ошибка измерения времени запаздывания δ, согласно [4], связана с длительностью зондирующего импульса τ и отношением сигнал/шум q:
 .
.
Уменьшение ошибки в этом случае связано с уменьшением длительности зондирующего импульса. Поэтому в линиях с относительно короткими участками следует стремиться к уменьшению длительности импульса до предела, определяемого возможностями аппаратуры и пропускной способностью линии (тем более, что при локации участков малой протяженности нет необходимости в применении мощных зондирующих импульсов). То есть для линий такой конфигурации достижение заявленного в способе результата исключает возможность применения время-частотной модуляции зондирующего сигнала и предполагает использование немодулированных импульсов малой длительности. Последнее требует альтернативных действий при обработке отраженных сигналов и измерении времени запаздывания, которые и описаны в дополнении к предлагаемому способу.
Кроме того, как следует из приведенного выражения, увеличение точности определения расстояния до неисправности связано с увеличением отношения сигнал/шум в приемном устройстве. Для участков линии средней зашумленности это увеличение может быть получено за счет ограничения массива отражений снизу, еще до его перевода в пакет униполярных импульсов, так, чтобы отраженный от неоднородностей и повреждений сигнал после ограничения был по большей части избавлен от шумов. Для каждого участка линии уровень ограничения может быть установлен индивидуально на основе тестовых измерений. Кроме этого, при зондировании немодулированным импульсом возможно применение входной узкополосной фильтрации сигнала, что также содействует увеличению упомянутого отношения.
Как следует из вышеизложенного, применение время-частотной модуляции ограничивает точность измерения расстояния до повреждения и при проведении зондирования линии, находящейся под напряжением. Возникающая дуга может исказить частотные характеристики массива отражений и привести к недостоверным результатам измерения расстояний в такой линии. Предпочтение в этом случае следует отдавать зондированию участка линии коротким немодулированным импульсом. Вероятность возникновения в дуговом разряде броска, аналогичного зондирующему импульсу, сравнительно мала, а все остальные проявления дуги в принимаемом сигнале могут быть уменьшены полосовой фильтрацией.
Таким образом, для линий с короткими участками и линий, находящихся под напряжением, применение этого дополнения к заявляемому способу ведет к повышению точности определения места повреждения линии, что соответствует поставленной задаче.
Повышению однозначности локализации и точности определения места повреждения способствует то, что в заявленном способе в один процесс посылки зондирующих импульсов посылают не менее двух импульсов, разделяя их посылку интервалом времени Тз, заведомо большим, чем удвоенное время прохождения зондирующего импульса по самому длинному участку линии, осуществляют прием отраженных сигналов от каждого из посланных n зондирующих импульсов, считая началом каждого из массивов время посылки очередного зондирующего импульса 1≤i≤n, а принятые массивы отраженных сигналов ограничивают снизу по предустановленному уровню и переводят в пакеты униполярных импульсов фиксированной амплитуды, причем пакеты задерживают в зависимости от номера зондирующего импульса i, отражениями которого они являются, на время Tзi, определяемое согласно выражению:
Тзi=(n-i)·Тз,
все пакеты суммируют по амплитуде в один пакет, который ограничивают снизу на величину, вычисляемую согласно формуле
Ао=А·(n-0.9),
где А фиксированная амплитуда исходных пакетов импульсов, а расстояния до неоднородностей и предварительные расстояния до места повреждения определяют на основании интервалов времени от посылки последнего из зондирующих импульсов до переднего фронта очередного импульса суммарного пакета.
Для линий высокой степени зашумленности использование только упомянутого выше ограничения снизу массива отраженных сигналов по предустановленному уровню может не дать достаточной степени отстройки от шумов линии. В этом случае посылка последовательно двух или более зондирующих импульсов, с последующим сложением принятых пакетов отражений, дает возможность практически полностью избавиться от любой шумовой или другой нерегулярной составляющей поступающих сигналов. Для правильного сложения из массивов отраженных сигналов сначала вырезают основную часть шумов, а результат переводят в пакеты униполярных импульсов одинаковой амплитуды. Затем пакеты задерживают так, чтобы при сложении совпали их начала. Учитывая статичность естественных неоднородностей и повреждений, можно ожидать, что их отражения сложатся, дав в сумме амплитуду сигнала равную произведению амплитуды пакетов на их количество. Но шумы, в силу своей нерегулярности, в разных пакетах будут размещены по-разному, поэтому в суммарном сигнале их амплитуда будет меньше, чем амплитуды статичных неоднородностей. Обрезая снизу полученный суммарный сигнал на величину Ао=А·(n-0.9), в результате получаем только импульсы, отраженные от статичных неоднородностей (коэффициент 0.9 вместо единицы предотвращает попадание случайных флуктуации в итоговый сигнал). Необходимое количество зондирующих импульсов в одном пакете зависит от интенсивности и плотности шумовой составляющей линии. Так как снижение уровня шума в сигнале влечет за собой повышение точности локации, можно утверждать, что предлагаемое дополнение способа содействует повышению точности определения расстояния до места повреждения сильно зашумленной линии.
На решение задачи изобретения направлено и уточнение к двум предыдущим дополнениям заявленного способа. В предлагаемом способе зондирующий импульс инвертируют, трансформируют по амплитуде и одновременно с исходным зондирующим импульсом из линии подают на приемное устройство, где эти импульсы суммируют по амплитуде, причем трансформируют инвертированный импульс так, чтобы сумма этих импульсов в приемном устройстве по амплитуде была меньше, чем импульсы, отраженные от неоднородностей.
Сущность предложения заключается в компенсации зондирующего импульса в приемном устройстве таким образом, чтобы он не "мешал" идентификации отражений от ближайших неоднородностей. Обычно используемый прием полного блокирования приемника на длительности зондирующего импульса приводит к тому, что отражения от близких к началу линии неоднородностей также будут заблокированы, что уменьшает вероятность обнаружения повреждений, попадающих в эту зону. Для линий небольшой длины, к которым, например, относятся распределительные силовые сети, последнее ведет к снижению достоверности и точности определения места повреждения. Предлагаемый способ позволяет снизить уровень всплеска напряжения на время прохождения зондирующего импульса по цепям приемника, не прибегая при этом к полному блокированию его входа. На фоне остаточного сигнала отражения от близких неоднородностей становятся разрешимыми, что увеличивает точность способа применительно к участкам линии небольшой длины.
Таким образом, применение предложенного способа обеспечивает решение поставленной задачи для всех оговоренных выше разновидностей линий электропередачи и связи.
Предлагаемый способ может быть реализован при помощи устройства, включающего генератор зондирующих импульсов, имеющий вход и два выхода, приемник, содержащий аналого-цифровой преобразователь и снабженный двумя входами и выходом, вычислительный блок, содержащий процессор и снабженный, по крайней мере, двумя выходами и входом, блок передачи информации, снабженный входом, причем один из входов приемника соединен с линией, а второй со вторым выходом генератора, вход блока передачи информации соединен с одним из выходов вычислительного блока, а выход приемника является выходом аналого-цифрового преобразователя. Вычислительный блок устройства снабжен субблоком дешифровки синхропакетов, выход которого соединен с дополнительным вторым входом процессора, а вход является вторым входом вычислительного блока, при этом блок передачи информации выполнен с возможностью приема синхропакетов и снабжен выходом, соединенным со вторым входом вычислительного блока.
Отмеченный выше основной недостаток прототипа - отсутствие синхронизации и возможности дистанционно управлять работой устройства - устраняется в заявляемом изобретении тем, что блок передачи информации устройства снабжен дополнительной функцией приема синхропакетов из единого центра, которым, как правило, является диспетчерский пункт. Вычислительный блок заявляемого устройства снабжен субблоком дешифровки синхропакетов, задачей которого является расшифровка информационных сообщений, передаваемых в этих синхропакетах. Кроме основной задачи - синхронизации работы вычислительного блока (а с ним и всего устройства) по единому графику, формируемому в центре, - субблок дешифровки расшифровывает и передает вычислительному блоку команды управления, которые могут содержаться в синхропакетах. Таким образом, становятся возможными синхронизация всех устройств контролируемой линии и дистанционное управление ими, что позволяет повысить точность определения места повреждения линии и устранить неоднозначность в его локализации.
Предлагаемый способ с дополнениями может быть реализован при помощи устройства, в котором приемник устройства содержит полосовой фильтр, усилитель-инвертор, каждый из которых включает вход и выход соответственно, блок задержки сигнала, снабженный двумя входами и m выходами, первый сумматор, включающий два входа и выход, второй сумматор, включающий m входов и выход, и два компаратора, каждый из которых содержит вход, соединенный с выходом соответствующего сумматора, и выход. Входы полосового фильтра и усилителя-инвертора являются первым и вторым входами приемника соответственно, а выходы полосового фильтра и усилителя-инвертора являются первым и вторым входами первого сумматора, второй вход блока задержки сигнала является третьим дополнительным входом приемника, который соединен с дополнительным выходом вычислительного блока, а m выходов блока задержки сигнала являются m входами второго сумматора, который через второй компаратор соединен с входом аналого-цифрового преобразователя приемника.
Как показал проведенный анализ прототипа, для линий с относительно короткими участками, а также для линий, находящихся под напряжением и сильно зашумленных линий, использование время-частотной модуляции зондирующего импульса не является оптимальным решением и влечет за собой снижение точности определения места повреждения. Последнее связано с противоречием между длительностью импульса с время-частотным заполнением и длинами зондируемых участков, между спектральными составами зондирующего сигнала и шумового заполнения поврежденной линии.
Отмеченное выше техническое противоречие устраняется в предлагаемом устройстве, все блоки которого оптимизированы для работы с короткими зондирующими импульсами и оснащены модулями, снижающими уровень шумов в итоговом сигнале, что полностью соответствует задаче изобретения.
Способ и устройство, согласно настоящей группе изобретений, поясняется на примере предпочтительного варианта их осуществления со ссылками на сопровождающие чертежи.
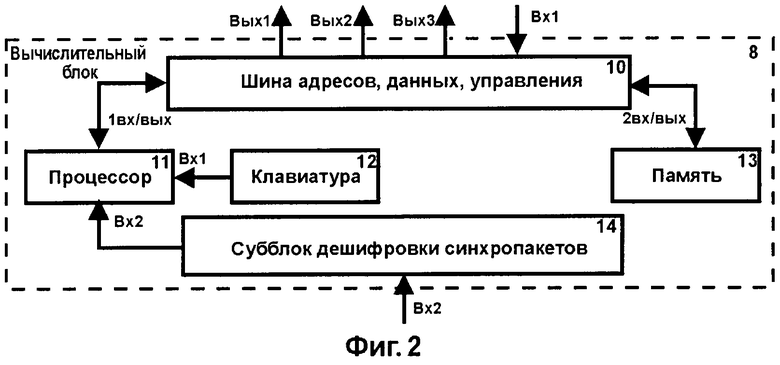
На фиг.1 представлено устройство, осуществляющее предложенный способ; на фиг.2 представлен пример исполнения вычислительного блока; на фиг.3 представлен вариант исполнения устройства, на фиг.4 представлен пример реализации приемника по варианту исполнения устройства; на фиг.5 приведен фрагмент схемы городской распределительной силовой сети, фиг.6-9 поясняют работу предлагаемого устройства.
Устройство (фиг.1) включает генератор зондирующих импульсов 1 (состоящий из блока памяти 2, цифроаналогового преобразователя 3 и усилителя мощности 4), направленный ответвитель (НО) 5, коммутатор 6, приемник 7, вычислительный блок 8 (например, микроЭВМ), блок приема-передачи информации 9.
Первый вход приемника 7 через направленный ответвитель 5 и коммутатор 6 связан с контролируемой линией, второй вход приемника 7 связан со вторым выходом генератора 1, а выход приемника 7 соединен с входом вычислительного блока 8.
Вычислительный блок 8 (фиг.2), в общем случае, может представлять собой микроЭВМ, содержащую шину адресов, данных, управления 10, процессор 11, устройство управления клавиатурой 12, модуль памяти 13 и субблок дешифровки синхропакетов 14, выход которого соединен с вторым входом процессора 11, а вход, являющийся вторым входом вычислительного блока 8, соединен с выходом блока приема-передачи информации 9.
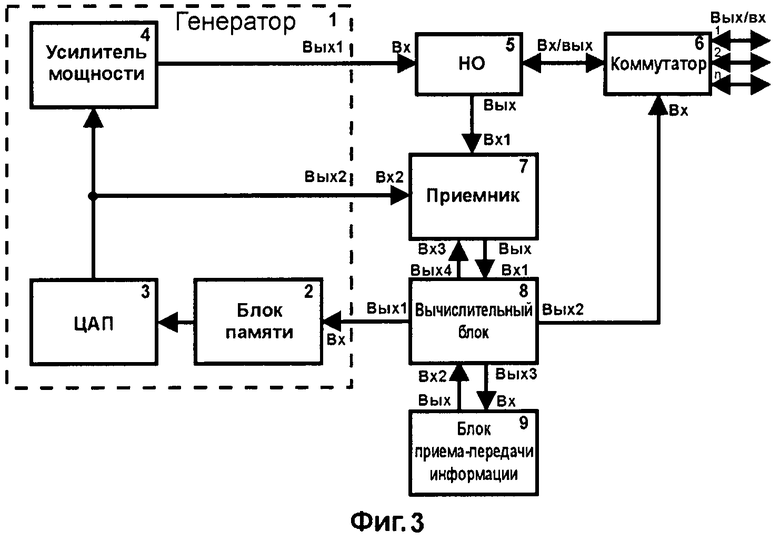
Вариант исполнения устройства (фиг.3) включает все перечисленные выше блоки, но в нем приемник 7 снабжен дополнительным третьим входом, соединенным с дополнительным выходом вычислительного блока 8. По этому варианту приемник 7 содержит (фиг.4) полосовой фильтр 15, усилитель-инвертор 16, первый сумматор 17, первый компаратор 18, блок задержки сигнала 19, второй сумматор 20, второй компаратор 21 и аналого-цифровой преобразователь (АЦП) 22.
Вход полосового фильтра 15 и вход усилителя-инвертора 16 является, соответственно, первым и вторым входами приемника 7, а выходы полосового фильтра 15 и усилителя-инвертора 16 соединены с двумя входами первого сумматора 17, выход которого, через первый компаратор 18, соединен с первым входом блока задержки сигнала 19, второй вход которого является третьим дополнительным входом приемника 7, соединенным с дополнительным выходом вычислительного блока 8.
Блок задержки сигнала 19, в общем случае, может представлять собой набор из m искусственных линий задержки, выполненных с возможностью переключения по команде вычислительного блока 8. Каждый из m выходов блока задержки сигнала 19, являющийся одновременно выходом одноименной линии задержки, соединен с соответствующим входом второго сумматора 20, выход которого через второй компаратор 21 соединен с аналого-цифровым преобразователем 22. Выход АЦП 22 является выходом приемника 7.
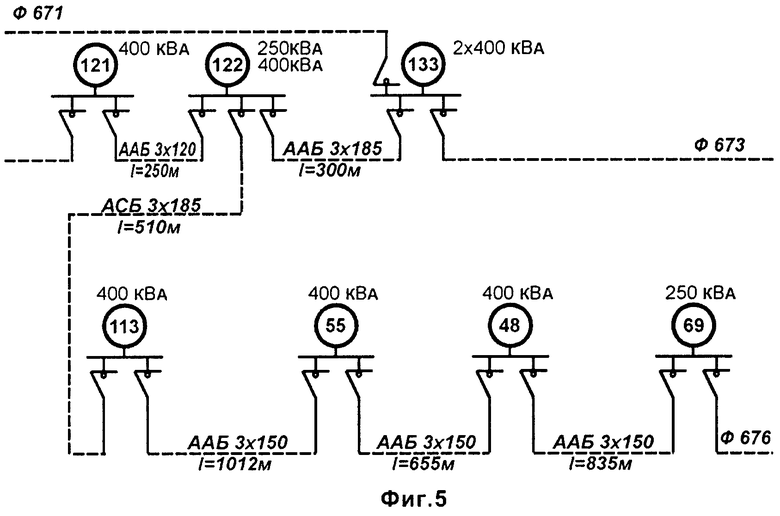
Заявляемый способ реализуется в работе предлагаемого устройства, которую рассмотрим на примере его воплощения для линии электропередачи городской силовой распределительной сети 6.3 кВ (фрагмент схемы сети распределительной подстанции РП-7 Энгельского филиала Облкоммунэнерго приведен на фиг.5) при моделировании возникающего повреждения участка подземной кабельной линии. Вся совокупность устройств этого куста сети размещается на трансформаторных подстанциях (ТП), являющихся границами участков контролируемой линии (на фиг.5 ТП обозначены кружками, внутри которых размещены номера ТП). Подземные силовые кабели на схеме обозначены штриховыми линиями, рядом с которыми помещены данные о типе кабеля и длине участка. Совокупность всех зондирующих устройств контролируемой линии образует информационную сеть и находится в подчинении у единого центра обработки информации, которым в данном случае является диспетчерский пункт. Такая информационная сеть может функционировать как самостоятельно, так и в составе системы мониторинга распределительной сети (например, такой как в источнике [5]).
Зондирование линий может проводиться непрерывно, в том числе и для линий под напряжением, так как спектр сигналов зондирования (0.4-1 МГц) совершенно не совпадает с частотой силовой сети. Передача и прием информации могут быть организованы в беспроводном канале. В этом случае информация от всех устройств сети передается непосредственно на диспетчерский пункт.
Устройствам данного куста сети предварительно (то есть до начала работы) присваивается индивидуальный номер и устанавливается очередность и периодичность (например, раз в 10 с) их связи с центром и зондирования линии (по команде центра, в критической ситуации, периодичность может быть существенно уменьшена). Усилителем мощности 4 генератора зондирующих импульсов 1 (фиг.3) каждого устройства куста сети предустанавливают уровень зондирующего импульса так, чтобы минимальный уровень отражений от естественных неоднородностей превышал средний уровень шумов тестируемого участка линии. Желательным является также установка для каждого из устройств куста своего разрешенного временного интервала (кванта времени), определяющего в какую часть текущей секунды данное устройство может осуществлять внешние операции (зондирование, передача данных). Положение кванта внутри секунды определяется принятой очередностью и расчетным временем активности устройства. Время активности (не более 0.015 с) включает процесс зондирования, приема и передачи данных от одного устройства. Установка квантов времени не позволяет устройствам одного куста влиять на работу друг друга даже в экстремальных условиях. На куст сети приходится 12-17 участков, то есть суммарное время активности устройств одного куста не выходит за пределы 0.3 с.
Для отсечки основного объема шумовой составляющей сигнала на всех устройствах также предварительно устанавливают уровень ограничения массива отраженных сигналов (на основании тестовых испытаний). Основываясь на величинах плотности и амплитуды шумовой составляющей данного участка линии, для устройств устанавливают количество зондирующих импульсов "n" в одном процессе (при изменении зашумленности это количество может быть откорректировано).
Для определенности рассмотрим работу устройств, ограничивающих участок кабельной линии длиной 655 м, пролегающей между ТП-55 и ТП-48 (фиг.5). Смежные с этим участки линии имеют длины 1012 м (для участка справа) и 835 м (слева) и выполнены кабелем того же типа. Предположим, что предустановленный уровень ограничения шумов в устройствах равен 17 В, отсчитывая от нижнего среза усиленного и выпрямленного сигнала, и для данных устройств оптимальна посылка 2 зондирующих импульсов в одном процессе. Этот куст силовой сети не содержит участков длиннее 1.5 км, поэтому для его устройств достаточным интервалом задержки является Тз=100 мкс, что в 1.4 раза больше, чем двойное время прохождения импульса по самому длинному участку кабеля данного типа.
В штатном режиме работы сети устройство подстанции ТП55 в свой квант времени с заданной периодичностью производит зондирование линии. Под воздействием управляющих сигналов вычислительного блока 8 (собранного на базе микроконтроллера ATmega128) ЦАП 3 генератора 1 формирует зондирующий импульс заданной формы, который усиливается усилителем мощности 4 и посылается в зондируемую линию (фиг.3). Информация о форме зондирующего сигнала хранится в блоке памяти 2 генератора 1. Одновременно с посылкой в линию зондирующего импульса на второй вход приемника 7 со второго выхода генератора 1 подается опорный импульс. Опорный импульс проходит через усилитель инвертор 16 (фиг.4), где трансформируется по амплитуде и инвертируется, а затем поступает на первый сумматор 17. На первый вход сумматора 17, одновременно с опорным, поступает зондирующий импульс.
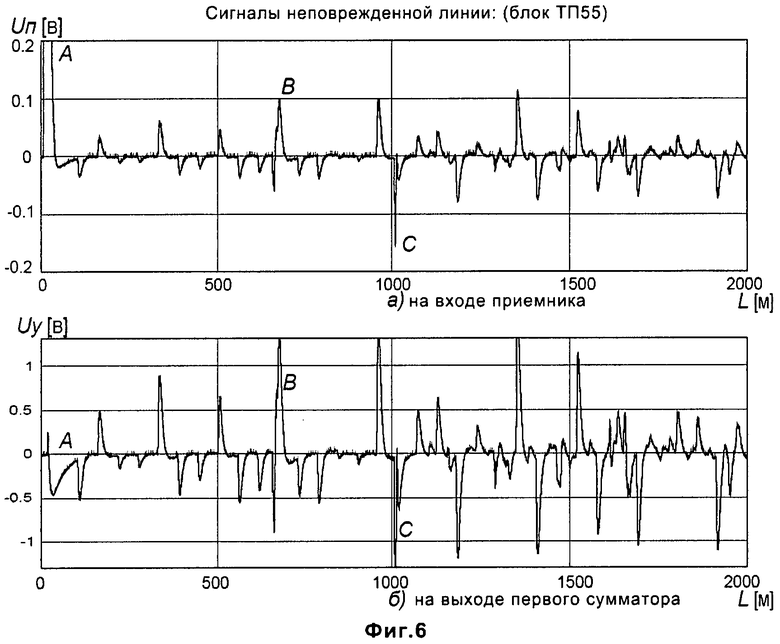
Диаграмма на фиг.6 "а" демонстрирует форму сигнала на первом входе приемника 7. Литерой "А" на ней обозначен зондирующий импульс, поступивший на вход приемника. Как видно из диаграммы, несмотря на наличие в цепях приемника 7 и генератора 1 (фиг.3) развязывающих устройств в виде направленного ответвителя 5, зондирующий импульс, тем не менее, проходит на вход приемника. Однако после суммирования и усиления сигнал приобретает вид, показанный на диаграмме "б" (фиг.6), где заметно, что разность зондирующего и опорного импульсов (литера "А") уже не мешает идентификации других отражений.
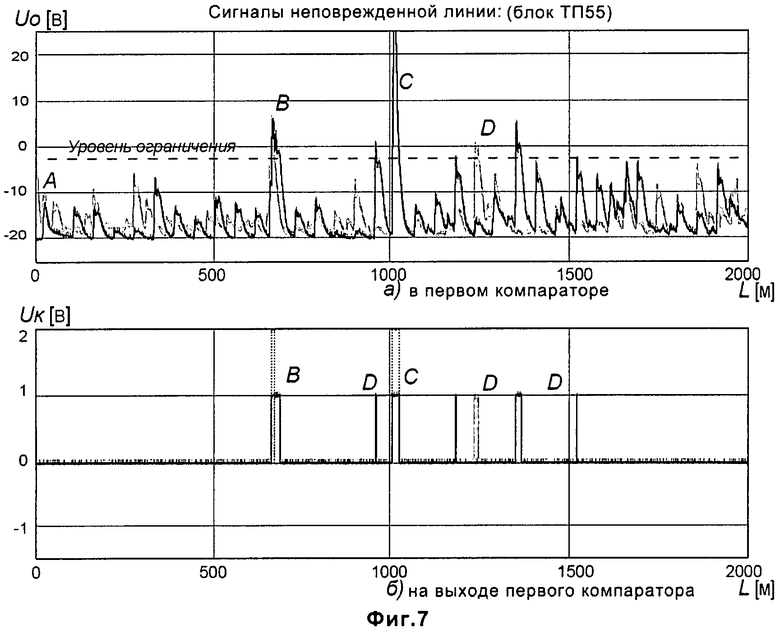
Зашумленный сигнал, отраженный от неоднородностей линии, проходит узкополосный фильтр 15 (активный полосовой фильтр Баттерворта 4 порядка на базе LM6172IM), существенно уменьшающий уровень и ограничивающий спектральный состав шумов, через сумматор 17 поступает на вход первого компаратора 18, где он усиливается, выпрямляется, проходит ограничение по уровню отсечки сигнала и превращается в пакет униполярных импульсов, амплитудой в 1 В. Последовательные стадии обработки сигнала показаны на диаграммах фиг.6, 7 "а" и "б", где литерами "В" обозначено отражение от противоположного конца тестируемого участка, литерами "С" - отражение от смежного участка, находящегося между ТП55 и ТП113 (фиг.5), а литерой "D" - шумы, оставшиеся после ограничения сигнала (для удобства восприятия все диаграммы масштабированы в единицах расстояния). По выходе из первого компаратора 18 сигнал поступает на вход блока задержки сигнала 19 (собранного на основе набора искусственных линий задержки М-типа, входы которых переключаются по команде вычислительного блока 8). Первый поступивший пакет униполярных импульсов в блоке 19 задерживается на время Tз=100 мкс. (Блок задержки сигнала, в зависимости от требуемой величины задержки, может быть выполнен на основе управляемых цифровых линий (например, микросхем TDA4665) или с применением бытовых ультразвуковых линий (например, УЛЗ64-8 или УЛЗ128-2Б). В последнем случае принятое для устройства время задержки должно быть кратно величинам 64 или 128 мкс.) По окончании задержки генератор посылает в линию второй зондирующий импульс, отражения которого проходят ту же обработку, что и первого, за исключением того, что второй пакет униполярных импульсов не задерживается, а сразу поступает на второй вход второго сумматора 20 (фиг.4). Для наглядности на диаграммах фиг.7 "а" и "б" отражения второго зондирующего импульса и результирующий пакет униполярных импульсов показаны более светлым тоном.
С запуском второго зондирующего импульса на первый вход второго сумматора 20 поступает задержанный пакет, а на второй вход - второй пакет отражений. Отражения от естественных неоднородностей (в частности, от противоположных концов смежных участков) при этом складываются и суммарный сигнал становится равным 2 В (сигнал на выходе второго сумматора 20 условно показан на фиг.7 "б" пунктиром), а шумы, в силу их нерегулярности, не совпадают во времени, их амплитуды не складываются, поэтому остаются равными 1 В. С выхода второго сумматора 20 сигнал подается на вход второго компаратора 21, где он проходит второе ограничение снизу по уровню Ao=1·(2-0.9)=1.1 В.
Результат ограничения превращается в пакет импульсов амплитудой 1 В. Этот пакет содержит информацию о размещении статичных неоднородностей двух смежных участков линии (как видно из диаграммы на фиг.7 "б", одна из отметок отстоит от ТП55 на расстоянии примерно 650 м; эта отметка является отражением противоположного конца тестируемого участка, а вторая отметка удалена на расстояние ~ 1010 м и является отражением конца левого смежного участка).
В виде импульсов амплитудой в 1 В (передний фронт которых содержит информацию о расстоянии до неоднородности) пакет поступает на вход АЦП 22 (например, микросхема типа PCF8591P), где он оцифровывается и поступает на вход вычислительного блока 8 (фиг.3).
Вычислительный блок 8 при помощи внутреннего быстрого счетчика (кварцевый генератор с тактовой частотой 20 МГц) измеряет интервалы времени от посылки второго импульса до прихода единиц, соответствующих передним фронтам импульсов отражений. Полученные для всего пакета данные запоминаются в модуле памяти 13 процессора 11 (фиг.2). Из них процессор 11 формирует кадр информации, к которому прибавляется уникальный номер устройства и CRC.
Через шину данных 10 сформированная информация в соответствующий момент времени передается в блок приема-передачи 9 (фиг.3), откуда она переправляется на диспетчерский пункт.
ЭВМ диспетчерского пункта имеют мощный вычислительный ресурс, несравнимый с ограниченными возможностями микроконтроллеров, поэтому диспетчерский пункт имеет возможность в режиме реального времени проводить анализ и сравнение полученных данных с предыдущими, полученными от того же устройства в предшествующем цикле зондирования. Кроме того, ЭВМ диспетчерского пункта могут запоминать и хранить информацию многих циклов зондирования сети, что дает возможность анализировать динамику изменений и, в какой-то степени, прогнозировать наступление нештатной ситуации. При работе совместно с системой мониторинга сети ЭВМ диспетчерского пункта могут обнаружить повреждение другими методами (или повреждения смежных систем) и могут дать устройствам команду на изменение режима работы. Можно показать, что с помощью предложенного способа и устройства могут быть классифицированы и определены повреждения любого типа, а с использованием коммутатора 6 (фиг.3) и повреждения отдельных фазных проводов многофазной линии электропередачи.
Если различия вновь полученных и хранимых данных находятся в допустимом пределе, машины диспетчерского пункта замещают предыдущую информацию вновь полученной и продолжают штатную работу. Признаком штатной работы для устройств служит передаваемый с диспетчерского пункта запускающий синхропакет, начинающий новый цикл зондирования линии.
Синхропакеты, поступающие от диспетчерского пункта, могут быть двух типов: широковещательные и адресные. Широковещательные синхропакеты адресованы всем устройствам куста сети. Как правило, они содержат команду синхронизации устройств по таймеру машин диспетчерского пункта (запускающий синхропакет), но могут содержать и другие общие для устройств данного куста команды. По команде синхронизации внутренние счетчики всех устройств обнуляются. Команда синхронизации подается в начале каждого из циклов зондирования линии данного куста сети, поэтому кварцованные счетчики процессоров не могут разойтись более чем на один такт (0.1 мкс), что обеспечивает синхронную и точную работу всех устройств куста.
Адресная команда может относиться к одному из устройств куста сети и, кроме кодового номера центра, содержит кодовый номер адресата, команду и CRC. Блок приема-передачи информации устройства 9 (фиг.3) все время, кроме самого момента передачи данных с этого устройства, находится в режиме прослушивания канала связи. Принятые сообщения из блока приема-передачи информации 9 передаются на субблок дешифратора синхропакетов 14 (фиг.2), который после их расшифровки (от кого получено сообщение, к какому типу принадлежит, кому адресовано, какую команду содержит и т.д.) передает соответствующую команду процессору 11, который воплощает эту команду, управляя работой устройства.
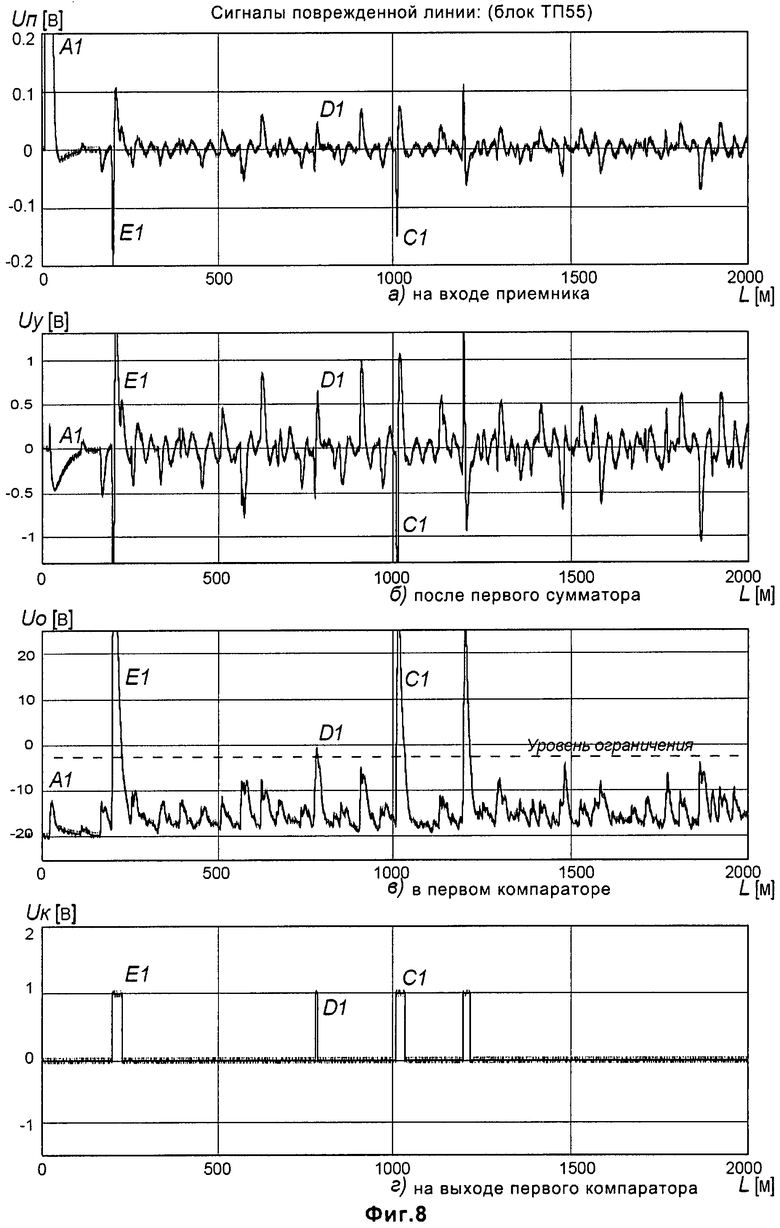
Работу устройства в режиме обнаружения повреждений рассмотрим на примере того же участка распределительной силовой сети (фиг.5), в котором повреждение в виде обрыва линии было смоделировано путем размыкания двух фаз на соединительной муфте, расположенной на расстоянии 190 м от ТП55.
Вся последовательность работы устройства ТП55 при повреждении сети полностью идентична описанной выше. Диаграммы полученного сигнала на разных стадиях его обработки показаны на фиг.8. Визуально сравнивая одинаковые стадии обработки сигнала на фиг.8 и на фиг.6, 7 можно отметить следующее:
- увеличилась плотность шумовой составляющей принимаемого сигнала;
- появился дополнительный выброс (литера "Е1", фиг.8), расположенный примерно на расстоянии 200 м от ТП55;
- исчез выброс (литера "В", фиг.6, 7), соответствующий отражению от противоположного конца тестируемого участка (точнее не совсем исчез, а резко уменьшился по амплитуде и вышел за пределы идентификации, что при обрыве двух фаз вполне закономерно);
- остался на прежнем месте выброс напряжения, соответствующий отражению от конца смежного участка (литеры "С" на фиг.6, 7 и литеры "С1" на фиг.8).
После прохождения всех стадий обработки данные передаются на диспетчерский пункт, где их сравнение с ранее полученными данными от устройства ТП55 показывает наличие между ними существенной разницы.
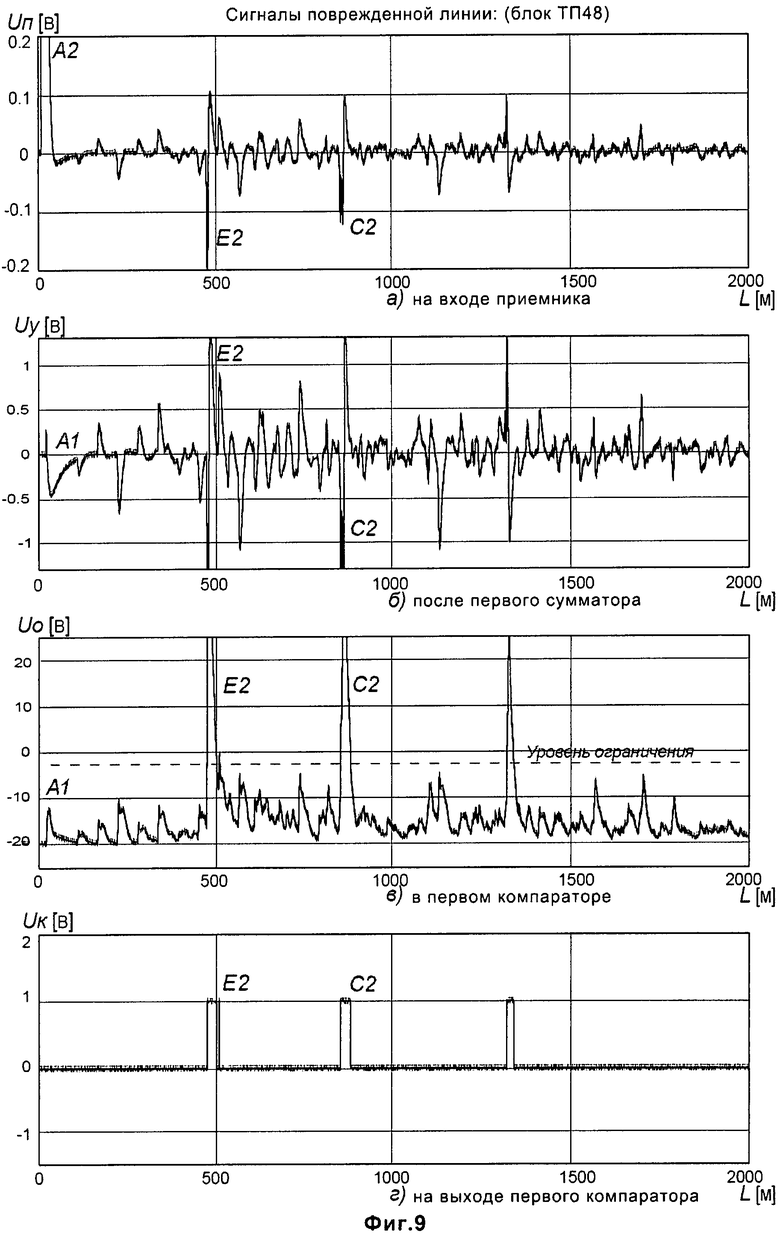
Работа устройства ТП48 идентична работе устройства ТП55, поэтому описывать ее отдельно нет необходимости. Отличия, подобные вышеописанным, могут быть найдены при сравнении диаграмм поврежденной (фиг.9) с диаграммами неповрежденной линии, полученными устройством ТП48. Разница заключается только в расстоянии до вновь появившегося выброса (литера "Е2", фиг.9), которое составляет примерно 470 м, и в месте положения оставшегося репера (литера "С2"), являющегося отражением от конца правого смежного участка длиной 835 м. В свою очередь, устройство ТП48 пересылает полученные данные на диспетчерский пункт, где аналогично первому случаю регистрируется разница с предшествующим состоянием. Разница данных со всех остальных устройств куста сети не выходит за пределы допустимого различия, поэтому на основании автокорреляционного сравнения однозначно идентифицируется поврежденный участок линии, заключенный между ТП55 и ТП48.
По данным, полученным от устройств ограничивающих поврежденный участок, на диспетчерском пункте методом исключения выделяют некоррелирующие расстояния, то есть определяют предварительные расстояния до места повреждения Lx55 и Lx48 (в каких бы единицах они не были представлены). В рассматриваемом случае эти расстояния представлены в тактах внутренних счетчиков двух устройств и равны соответственно Lx55=44 тактам, Lx48=107 тактам. Подставив предварительные расстояния в приведенную ранее формулу, можно получить:

Таким образом, расчетное расстояние от ТП55 до места моделируемого повреждения равно 190.86 м, что менее чем на 0.5% отличается от его истинного значения. (Приведенная выше ошибка в основном связана с дискретностью счета. С увеличением измеряемых длин относительная ошибка будет уменьшаться, но для подземных кабельных линий дальнейшее повышение точности, видимо, не имеет смысла, так как размеры вскрышных работ все равно превышают абсолютную величину ошибки.)
Приведенный пример реализации показал эффективность и перспективность применения заявляемого устройства и способа для определения места повреждения линий электропередачи и связи произвольной конфигурации, в том числе и линий, находящихся под нагрузкой, в частности кабельных линий городской силовой распределительной сети 6.3 кВ.
Применение предложенного способа и реализующего его устройства в распределительных сетях дает возможность автоматически, дистанционно и оперативно определять местоположение повреждения кабельных линий подземного залегания, что по сравнению с существующим уровнем техники значительно сокращает время обнаружения и устранения неисправности. Согласно ПУЭ [6] место повреждения должно быть обнаружено в течение двух часов. Однако практически, даже при хорошей организации, место повреждения удается обнаружить в течение 6-10 часов. Особые трудности отыскания места повреждения появляются в поземных кабельных линиях с изолированной нейтралью. Визуальный контроль их затруднен и определение места повреждения занимает подчас несколько суток, причем вследствие значительных смещений нейтрали, возникающих при коротких замыканиях, такие линии должны быть отключены и должны пребывать в отключенном положении до обнаружения и устранения повреждения. При существующем уровне техники обнаружение конкретного местоположения повреждения производится, как правило, переносным оборудованием вручную, причем на участках линий полностью отключенных от всех соединений, что также влечет за собой немалые временные затраты. За относительно короткое время (4-6 часов), при наличии достаточного количества переносной аппаратуры, место повреждения может быть определено лишь при одновременной работе нескольких бригад. Время отыскания и устранения повреждения и количество бригад, принимающих в этом участие, можно значительно сократить, если предварительно и с достаточной точностью установить участок и расстояние до места повреждения подземной кабельной линии. Именно такой технический результат достигается применением предлагаемого изобретения.
Источники информации
1. Измерение расстояний до мест повреждений на воздушных и кабельных линиях электропередачи и связи/ В.Л. Бакиновский, А.П. Осадчий, Н.И. Сосфенов, В.К. Спиридонов. - ЦНИЭЛ, 1954, вып.2.
2. Шалыт Г.М. Определение мест повреждения в электрических сетях. - М.: Энергоиздат, 1982, 312 с.
3. SONG, Y.H., AGGARWAL, R.К. and JOHNS, А.Т., "Digital simulation off fault arcs on long-distance compensated transmission systems with particular reference to adaptive autoreclosure", European Trans. on Electrical Power Engineering, Vol.5, No.5, pp.315-324 (September/October 1995).
4. Теоретические основы радиолокации. Под ред. Ширмана Я.Д. Учебное пособие для ВУЗов. - М.: Советское радио, 1970, стр.192.
5. Кадомская К.П., Качесов В.Е., Лавров Ю.А., Овсянников А.Г., Сахно В.А. Диагностика и мониторинг кабельных сетей средних классов напряжения // Электротехника, 11, 2000.
6. Правила устройства электроустановок. М.: Энергоатомиздат, 1985. - 640 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2437110C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269789C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2013 |
|
RU2552388C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТ ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ РАСПРЕДЕЛИТЕЛЬНЫХ СЕТЕЙ | 2008 |
|
RU2368912C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2400765C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ С ДРЕВОВИДНОЙ СТРУКТУРОЙ | 2012 |
|
RU2511640C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТ ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ РАСПРЕДЕЛИТЕЛЬНЫХ СЕТЕЙ | 2005 |
|
RU2292559C1 |
| Способ автоматического повторного включения кабельно-воздушной линии электропередачи | 2017 |
|
RU2658673C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2330298C2 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376612C1 |

Группа изобретений относится к электроизмерительной технике и средствам диагностирования и может быть применена для определения расстояния до мест повреждения линий электропередачи и связи. Сущность: способ заключается в посылке в линию зондирующих импульсов напряжения, приеме отраженных сигналов и определении расстояния до неоднородностей и мест повреждения линии по временным задержкам отраженных импульсов относительно зондирующих. Зондирование осуществляют с двух противоположных концов участков линии поочередно. Информацию о расстояниях до неоднородностей передают в единый центр. Поврежденный участок определяют путем сравнения полученной и хранимой информации из одного источника. Уточненное расстояние до места повреждения участка рассчитывают на основании данных, полученных с двух его концов. Очередность посылки и приема импульсов, а также передачи информации в единый центр синхронизируют по синхропакетам, принимаемым из этого центра. Для этого устройство оснащено субблоком дешифровки синхропакетов. Технический результат: однозначность и высокая точность определения мест повреждения неоднородных разветвленных линий произвольной конфигурации, автоматизация процесса диагностики линий, сокращение времени обнаружения повреждения. 2 н. и 4 з.п. ф-лы, 9 ил.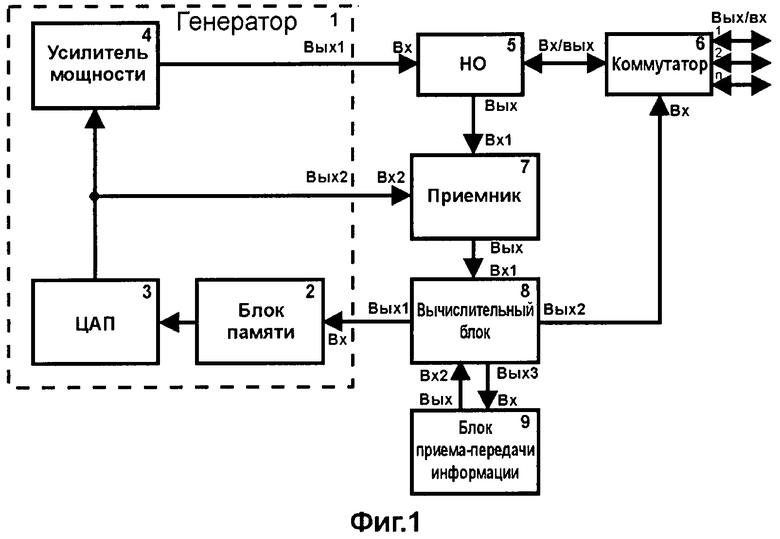
1. Способ определения места повреждения линий электропередачи и связи, в котором в линию посылают зондирующие импульсы напряжения, принимают отраженные импульсы с последующей их фильтрацией, анализом и измерениями временных задержек отраженных импульсов относительно зондирующих, на основании которых определяют расстояния до неоднородностей, фиксируют массив отраженных сигналов, полученных с неповрежденной линии в виде электронного образа линии, производят автокорреляционную обработку, расстояния до естественных неоднородностей записывают в виде реперных точек, передают эту информацию в единый центр и при обнаружении повреждения линии рассчитывают расстояние до места повреждения, отличающийся тем, что для линий, в том числе и разветвленных, состоящих из множества участков, осуществляют процесс посылки зондирующих импульсов напряжения и приема отраженных импульсов с двух противоположных концов участков линии поочередно, массив отраженных сигналов фиксируют для участков линии, причем расстояния до неоднородностей записывают для участков линии в виде цифровой информации, которую снабжают метками, уникальными для каждого из возможных источников этой информации, и поочередно передают в единый центр, где ее хранят, по крайней мере, до получения обновленной информации из того же источника, а для обнаружения поврежденного участка полученную информацию о расстоянии до естественных неоднородностей и до неоднородности, возникшей при повреждении участка линии, подвергают автокорреляционному сравнению с предыдущей информацией из того же источника и при наличии некоррелирующих расстояний определяют поврежденный участок и предварительные расстояния до места повреждения Lx1 и Lx2, определенные с двух концов этого участка, причем уточненное расстояние до места повреждения  от любого из концов K=1÷2 участка рассчитывают по формуле:
от любого из концов K=1÷2 участка рассчитывают по формуле:
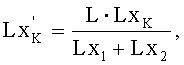
где L - известная полная длина этого участка линии, м,
а очередность процесса посылки и приема импульсов с концов участков линии и передачи информации в единый центр синхронизируют по синхропакетам, которые принимают из этого центра.
2. Способ по п.1, отличающийся тем, что массив отраженных сигналов для участков линии подвергают амплитудному ограничению снизу по уровню, который предустанавливают с превышением среднего уровня шумов в участке линии, но ниже минимального уровня отражений от естественных неоднородностей, затем массив переводят в пакет униполярных импульсов фиксированной амплитуды, а расстояния до естественных неоднородностей и предварительные расстояния до места повреждения определяют на основании интервалов времени от посылки зондирующего импульса и до прихода переднего фронта очередного импульса пакета.
3. Способ по п.1, отличающийся тем, что в один процесс посылки зондирующих импульсов посылают не менее двух импульсов, разделяя их посылку интервалом времени Тз, заведомо большим, чем удвоенное время прохождения зондирующего импульса по самому длинному участку линии, осуществляют прием отраженных сигналов от каждого из посланных n зондирующих импульсов, считая началом каждого из массивов время посылки очередного зондирующего импульса 1≤i≤n, а принятые массивы отраженных сигналов ограничивают снизу по предустановленному уровню и переводят в пакеты униполярных импульсов фиксированной амплитуды, причем пакеты задерживают в зависимости от номера зондирующего импульса i, отражениями которого они являются, на время Tзi, определяемое согласно выражению:
Tзi=(n-i)·Tз,
все пакеты суммируют по амплитуде в один пакет, который ограничивают снизу на величину, вычисляемую согласно формуле:
Ао=А·(n-0.9),
где А - фиксированная амплитуда исходных пакетов импульсов, а расстояния до неоднородностей и предварительные расстояния до места повреждения определяют на основании интервалов времени от посылки последнего из зондирующих импульсов до переднего фронта очередного импульса суммарного пакета.
4. Способ по п.2 или 3, отличающийся тем, что зондирующий импульс инвертируют, трансформируют по амплитуде и одновременно с исходным зондирующим импульсом из линии подают на приемное устройство, где эти импульсы суммируют по амплитуде, причем трансформируют инвертированный импульс так, чтобы сумма этих импульсов в приемном устройстве по амплитуде была меньше, чем импульсы, отраженные от неоднородностей.
5. Устройство для определения места повреждения линий электропередачи и связи, включающее генератор зондирующих импульсов, имеющий вход и два выхода, приемник, содержащий аналого-цифровой преобразователь и снабженный двумя входами и выходом, вычислительный блок, содержащий процессор и снабженный, по крайней мере, двумя выходами и входом, блок передачи информации, снабженный входом, причем один из входов приемника соединен с линией, а второй - со вторым выходом генератора, вход блока передачи информации соединен с одним из выходов вычислительного блока, а выход приемника является выходом аналого-цифрового преобразователя, отличающееся тем, что вычислительный блок устройства снабжен субблоком дешифровки синхропакетов, выход которого соединен с дополнительным вторым входом процессора, а вход является вторым входом вычислительного блока, при этом блок передачи информации выполнен с возможностью приема синхропакетов и снабжен выходом, соединенным со вторым входом вычислительного блока.
6. Устройство по п.5, отличающееся тем, что приемник устройства содержит полосовой фильтр, усилитель-инвертор, каждый из которых включает вход и выход соответственно, блок задержки сигнала, снабженный двумя входами и m выходами, первый сумматор, включающий два входа и выход, второй сумматор, включающий m входов и выход, и два компаратора, каждый из которых содержит вход, соединенный с выходом соответствующего сумматора, и выход, при этом входы полосового фильтра и усилителя-инвертора являются первым и вторым входами приемника соответственно, а выходы полосового фильтра и усилителя-инвертора являются первым и вторым входами первого сумматора, второй вход блока задержки сигнала является третьим дополнительным входом приемника, который соединен с дополнительным выходом вычислительного блока, a m выходов блока задержки сигнала являются m входами второго сумматора, который через второй компаратор соединен со входом аналого-цифрового преобразователя приемника.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2400765C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОВРЕЖДЕНИЙ В СЕТЯХ С РАЗВЕТВЛЕННОЙ ТОПОЛОГИЕЙ | 2008 |
|
RU2386974C1 |
| Способ определения расстояния до места повреждения линий электропередачи и связи | 1984 |
|
SU1219988A1 |
| Устройство для измерения расстояния до места повреждения проводов и кабелей | 1982 |
|
SU1081571A1 |
| US 6385561 В1, 07.05.2002 | |||
| US 6534997 В1, 18.03.1984 | |||
| US 20040036478 А1, 26.02.2004 | |||
| JP 7128389 А, 19.05.1995. | |||

