Изобретение относится к железнодорожному транспорту и может быть использовано в автоматизированных цифровых системах диспетчерского управления железнодорожным транспортом.
Известна централизованная диспетчерская система с распределенными контрольными пунктами, содержащая центральный пункт управления с рабочим местом поездного диспетчера и распределенные контролируемые пункты, объединенные магистральной линией связи. Резервированный центральный блок управления каждого распределенного контролируемого пункта управления состоит из основного комплекта, резервного комплекта и модуля диагностики, которые связаны между собой. Каждый из упомянутых модулей состоит из модуля управления и модуля связи. Модуль управления содержит ЭВМ, запоминающие устройства, устройства индикации, устройство сброса, устройство отображения, буфер ввода-вывода, устройство ввода, устройство согласования с локальной сетью, датчик температуры, счетчик времени, устройство преобразования интерфейса, устройство управления упомянутым комплектом и преобразователь напряжения (RU 2240245 C1, B61L 27/04, 07.02.03).
Недостатком этой системы является ограничение в эффективности управления движением, обусловленное недостаточным обменом с поездами информацией, необходимой для оптимального регулирования движения, в особенности, при отклонениях в поездной обстановке от предусмотренной запланированным графиком движения.
Известны система автоматизированного управления и автоматизированного ведения поездов, которые используются на поездах, обращающихся, в частности, на участках с диспетчерской централизацией, содержащие на локомотиве блок автоведения, входом соединенный с пультом ручного задания параметров, полученных от диспетчера по радиоканалу через бортовой радиомодем с антенной. Выходы блока автоведения соединены с системами разгона и торможения поезда, а также с входами блоков индикации и речевой информации (RU 2320498, B60L 15/40, 27.03.08).
Система автоматизированного ведения обеспечивает управление движением поезда, включая пуск и разгон, выбор режима ведения поезда на перегонах, подтормаживание при выполнении ограничений скорости, точное торможение под сигналы, требующие проезда с ограниченной скоростью, а также отображение информации о текущей и рациональной динамике движения. При этом используется информация, хранящаяся в бортовой базе данных.
База данных, находящаяся в памяти устройства автоведения поезда, создается с помощью специального автоматизированного рабочего места после проведения тяговых расчетов по определению оптимальных траекторий движения поездов по критерию минимизации энергии расхода на их тягу. База данных включает в себя время хода по зоне обращения поезда, расстояние между остановками, координаты объектов (светофоры, переезды, ПОНАБ, токоразделы и др.), постоянные ограничения скорости, названия остановочных пунктов, расчетные значения коэффициентов тяги для расчета на борту скорости отключения и подключения тяги для каждого перегона, варианты тормозной кривой для разных способов торможения (под ограничение скорости или остановку под красный сигнал светофора), номера поездов, служебное расписание, профиль пути участков обращения поезда, приказные постоянные ограничения скорости.
Известна система предупреждения аварии состава, обращающегося на участке с диспетчерской централизацией, в котором на локомотивах, вовлеченных в систему управления, установлена система автоведения состава, включающая в себя бортовую ЭВМ, соединенную с визуализатором обстановки, силовой установкой локомотива и устройством автоматической локомотивной сигнализации с автостопом, а также установлены подключенные к бортовой ЭВМ бортовые радиомодемы цифрового радиоканала связи, соединенные с бортовыми антенными блоками.
На центральном пункте управления и распределенных контролируемых пунктах размещены стационарные радиомодемы цифрового радиоканала связи, соединенные со стационарными антенными блоками (RU 2307040, B61L 9/04, 27.09.07).
Недостатками этих двух приведенных выше локомотивных систем является ограниченная эффективность устройств автоведения, которая объясняется следующими причинами:
- условия движения поезда в реальном времени, с учетом реально сложившейся поездной обстановки, машинист выбирает на свое усмотрение, а также с учетом указаний от диспетчера, которые вырабатываются без учета данных, которыми располагает система автоведения на каждом конкретном поезде, что ограничивает эффективность устройств автоведения, в особенности, при отклонениях поездной обстановки от запланированной графиком движения;
- для повышения эффективности, система в целом требует, чтобы диспетчеру была доступна информация о текущих параметрах движения, которые использует система автоведения на каждом из поездов в зоне диспетчерского управления.
При этом важно, чтобы вся необходимая информация для оптимального функционирования системы в целом, поступала без задержек и ошибок, производимых человеком-оператором. Поездной диспетчер, по сравнению с машинистами поездов, с одной стороны, владеет всей первичной информацией о реально сложившейся поездной обстановке на участке, а с другой стороны, имеет возможность интеллектуальной поддержки от оптимизационных программ своего автоматизированного рабочего места.
Наиболее близкой по технической сущности является система управления движением поездов при диспетчерской централизации, содержащая центральный пункт управления и распределенные контролируемые пункты, с размещенными на них устройствами постов ЭЦ и связанными с ними устройствами телеуправления и телесигнализации диспетчерской централизации, объединенные магистральной линией связи. На центральном пункте управления размещена стационарная ЭВМ автоматизированного рабочего места поездного диспетчера, соединенная через первый интерфейсный модуль с устройствами телеуправления и телесигнализации диспетчерской централизации и, через второй интерфейсный модуль, связанная с автоматизированной системой оперативного управления перевозками (АСОУП). (Кравцов Ю.А. «Системы железнодорожной автоматики и телемеханики», М.: Транспорт, 1996, с.255, рис.8.1, с.304, рис.8.25).
Недостатком этой системы также являются ограничения в эффективности управления движением, обусловленные недостаточным обменом с поездами информацией, необходимой для оптимального регулирования движения.
Технический результат предлагаемого изобретения заключается в повышении эффективности диспетчерского управления, за счет повышения точности выполнения графика движения поездов, повышении пропускной и провозной способности перегонов и станций, снижении расхода электроэнергии на тягу, снижении психофизиологической нагрузки на машинистов и диспетчеров.
Технический результат достигается тем, что в системе управления движением поездов при диспетчерской централизации, содержащей центральный пункт управления и распределенные контролируемые пункты, с размещенными на них устройствами постов ЭЦ и связанными с ними устройствами телеуправления и телесигнализации диспетчерской централизации, объединенные магистральной линией связи, и в которой на центральном пункте управления размещена стационарная ЭВМ автоматизированного рабочего места поездного диспетчера, соединенная, через первый интерфейсный модуль, с устройствами телеуправления и телесигнализации диспетчерской централизации и, через второй интерфейсный модуль, связанная с автоматизированной системой оперативного управления перевозками, причем на локомотивах, вовлеченных в систему управления, установлена система автоведения состава, включающая в себя бортовую ЭВМ, соединенную с визуализатором обстановки, силовой установкой локомотива и устройством автоматической локомотивной сигнализации с автостопом, а также установлены подключенные к бортовой ЭВМ бортовые радиомодемы цифрового радиоканала связи, соединенные с бортовыми антенными блоками, а на центральном пункте управления и распределенных контролируемых пунктах размещены стационарные радиомодемы цифрового радиоканала связи, соединенные со стационарными антенными блоками, согласно изобретению на центральном пункте управления и распределенных контролируемых пунктах, введены контроллеры связи, которые своими первыми портами, через модемы, подключены к линии связи, а вторыми портами соединены со стационарными радиомодемами цифрового радиоканала связи, при этом на центральном пункте управления контроллер связи соединен со стационарной ЭВМ автоматизированного рабочего места поездного диспетчера, к отдельному порту которой подключен блок управления режимами оптимизации параметров организации движения поездов.
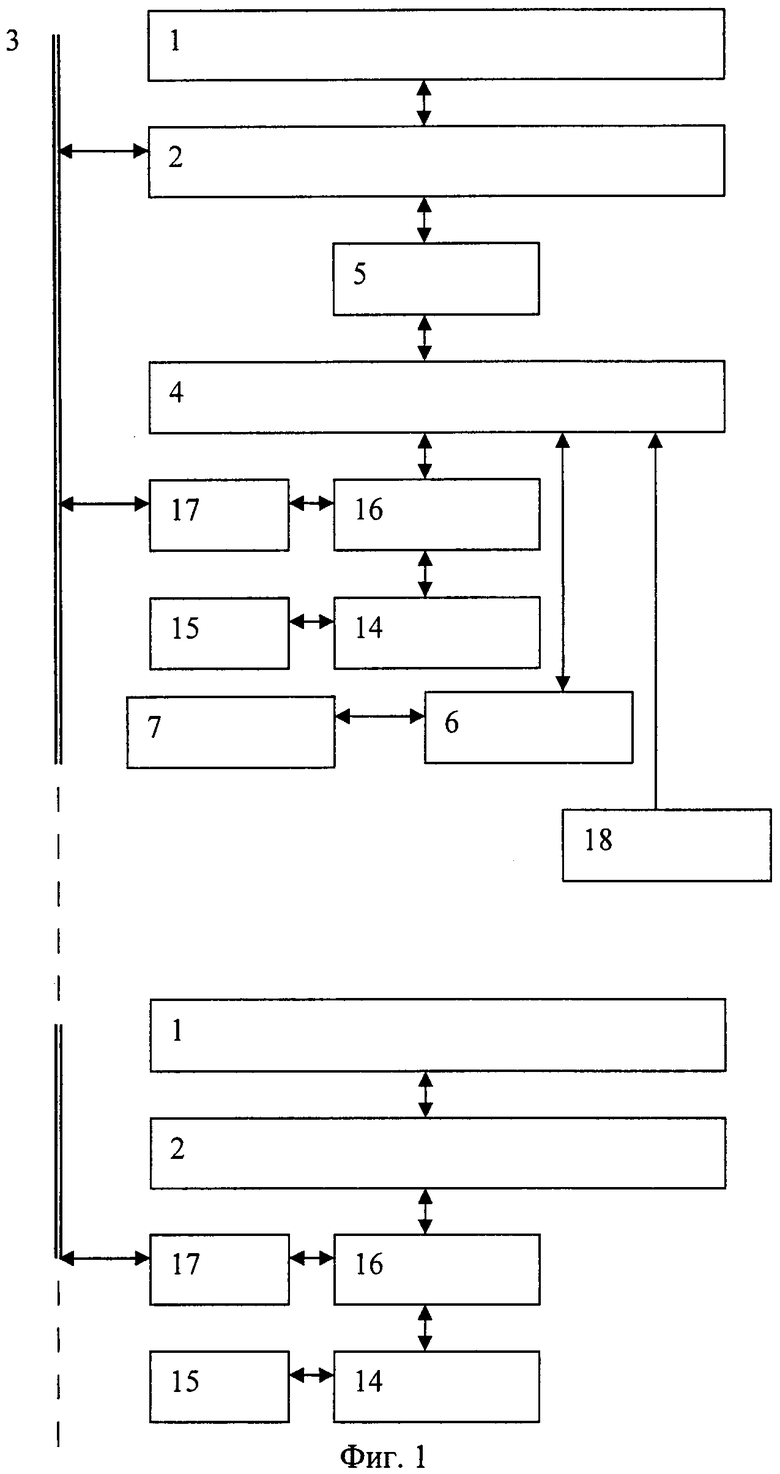
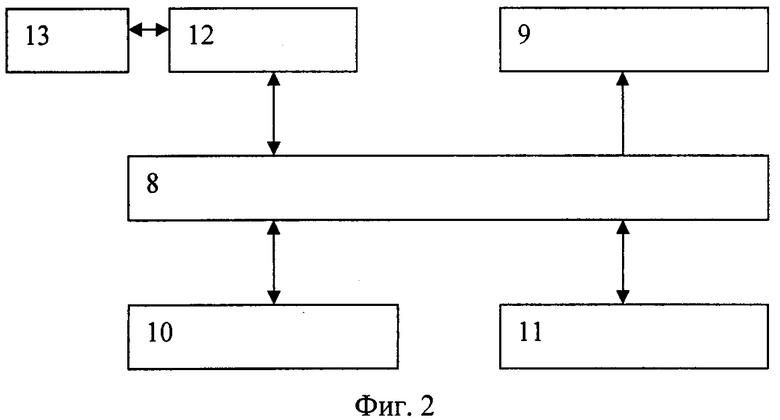
На Фиг.1 приведена структурная схема устройств центрального пункта управления и распределенных контролируемых пунктов (Стационарные устройства системы), а на Фиг.2 - структурная схема бортовых локомотивных устройств, вовлеченных в систему поездов (Локомотивные устройства системы).
Система управления движением поездов при диспетчерской централизации содержит центральный пункт управления и распределенные контролируемые пункты, с размещенными на них устройствами 1 постов ЭЦ и связанными с ними устройствами 2 телеуправления и телесигнализации диспетчерской централизации, объединенные магистральной линией связи 3, при этом на центральном пункте управления размещена стационарная ЭВМ 4 автоматизированного рабочего места поездного диспетчера (АРМ-ДНЦ), соединенная через первый интерфейсный модуль 5 с устройствами 2 телеуправления и телесигнализации диспетчерской централизации и, через второй интерфейсный модуль 6, связанная с автоматизированной системой оперативного управления перевозками 7 (АСОУП), причем на локомотивах, вовлеченных в систему управления, установлена система автоведения состава, включающая в себя бортовую ЭВМ 8, соединенную с визуализатором обстановки 9, силовой установкой локомотива 10 и устройством автоматической локомотивной сигнализации с автостопом 11, а также установлены подключенные к бортовой ЭВМ 8 бортовые радиомодемы 12 цифрового радиоканала связи, соединенные с бортовыми антенными блоками 13, а на центральном пункте управления и распределенных контролируемых пунктах размещены стационарные радиомодемы 14 цифрового радиоканала связи, соединенные со стационарными антенными блоками 15. Также на центральном пункте управления и распределенных контролируемых пунктах размещены контроллеры 16 связи, которые своими первыми портами, через модемы 17, подключены к магистральной линии связи 3, а вторыми портами соединены со стационарными радиомодемами 14 цифрового радиоканала связи, при этом на центральном пункте управления, контроллер 16 связи соединен со стационарной ЭВМ 4 автоматизированного рабочего места поездного диспетчера (АРМ-ДНЦ), к отдельному порту которой подключен блок 18 управления режимами оптимизации параметров организации движения поездов.
Система функционирует следующим образом.
Поездной диспетчер (ДНЦ) управляет диспетчерским кругом протяженностью 100-150 километров, обеспечивая движение поездов по графику, а в случае нарушения графика, - ввод опоздавших поездов в график. Для этого ДНЦ, например, уменьшает продолжительность стоянки поездов на промежуточных станциях и разъездах, изменяет порядок и пункты скрещения и обгона поездов, отправляет поезда по неправильному пути на двухпутных вставках. Диспетчерская централизация позволяет ДНЦ с центрального пункта управления, со своего автоматизированного рабочего места АРМ-ДНЦ, управлять стрелками и сигналами всех линейных пунктов, входящих в диспетчерский круг. При этом сигналы управления объектами устройств СЦБ поступают от ЭВМ 4 АРМ-ДНЦ, через контроллер 16 связи, модем 17, магистральную линию связи 3 и устройства 2 телеуправления и телесигнализации диспетчерской централизации на посты 1 ЭЦ.
По этому же пути, в обратном направлении, к ДНЦ идут информационные сигналы о состоянии объектов устройств СЦБ. В результате ДНЦ имеет возможность управлять из одного пункта стрелками и светофорами распределенных пунктов диспетчерского круга. Он также имеет информацию о положении и занятости стрелок, занятости перегонов и путей на станциях, показаниях светофоров и др. Кроме этого ДНЦ имеет возможность перевода станций на резервное управление и автоматической записи графика исполненного движения поездов, а также возможность изменения направления движения или пропуска поездов по одному пути, при двухпутной автоблокировке, в случае выполнения ремонтно-путевых работ на двухпутных железнодорожных участках.
При производстве ремонтно-путевых работ в условиях непрекращающегося движения грузовых и пассажирских поездов, для их обеспечения, в графике движения предусматриваются «окна» большой продолжительности (6 часов и более). При закрытии одного из двух главных путей на перегоне, по второму организуется пропуск поездов встречных направлений, т.е. перегон функционирует, как однопутная линия. Естественно, что при больших размерах движения (для которых и предусматривается двухпутная линия), пропуск поездов по однопутному перегону вызывает существенный рост эксплуатационных расходов, связанных с временными потерями из-за ограничения скоростей движения грузовых и пассажирских поездов по участку производства ремонтно-путевых работ, а также необходимостью скрещения поездов встречных направлений и обгоном грузовых поездов пассажирскими, ростом энергетических затрат, вызванным разгоном и торможением скрещиваемых и обгоняемых поездов.
Для выработки эффективного управления ДНЦ использует связь с автоматизированной системой оперативного управления перевозками АСОУП, которая выполняет комплекс оптимизационных алгоритмов организации движения поездов, например, для выбора очередности пропуска грузовых и пассажирских поездов через участок производства ремонтных работ или режимов энергосбережения. При этом основными режимами оптимизации являются:
- обеспечение минимальных совокупных расходов, связанных с задержками поездов всех или отдельных категорий, с учетом энергетических затрат на разгон и торможение;
- обеспечение минимальных задержек в движении поездов, без учета энергетических затрат на разгон и торможение;
- обеспечение минимальных энергетических затрат на разгон и торможение, без учета задержек в движении поездов;
- обеспечение минимальных задержек поездов при приеме на станцию прибытия.
В предлагаемой системе, для наилучшего управления, (в частности, учета энергетических затрат) в АРМ-ДНЦ, а также в АСОУП, поступает информация от систем автоведения составов. Эта информация проходит от бортовых ЭВМ 8, через бортовые радиомодемы 12 цифрового радиоканала связи, бортовые антенные блоки 13, цифровой радиоканал связи (не показан), стационарные антенные блоки 15, стационарные радиомодемы 14 цифрового радиоканала связи, в контроллеры 16 связи. Контроллеры 16 связи накапливают информацию, поступающую от поездов, находящихся в пределах устойчивой радиосвязи с данным пунктом.
Имеющийся в настоящее время на железнодорожном транспорте канал диапазона 160MHz обеспечивает возможность цифровой связи в пределах до 20 километров. Информация, накопленная в контроллерах 16 связи распределенных контролируемых пунктов, далее преобразуется контроллерами 16 и передается через модемы 17 и магистральную линию связи 3, в контроллер 16 связи центрального пункта управления. Контроллер 16 связи центрального пункта управления принимает также и информацию от близко расположенных поездов непосредственно, через свои стационарные антенный блок 15 и стационарный радиомодем 14 цифрового радиоканала связи.
Далее, от контроллера 16 связи центрального пункта, информация о параметрах движения поездов поступает в ЭВМ 4 АРМ-ДНЦ. От ЭВМ 4, через второй интерфейсный модуль 6, информация передается в АСОУП 7, где она может использоваться в оптимизационных алгоритмах.
В обратном направлении на поезда от АСОУП 7 и ЭВМ 4 АРМ-ДНЦ передается информация о рекомендуемых временах прибытия на соседнюю станцию, рекомендуемом времени отправления, рекомендуемой скорости движения и др. Эта информация позволяет системам автоведения и машинистам составов дополнительно повысить эффективность ведения состава.
Поездной диспетчер, в зависимости от ситуации, сложившейся в процессе пропуска поездов, воздействует на блок 18 управления режимами оптимизации параметров организации движения поездов и устанавливает соответствующий режим оптимизации. Блок 18 обеспечивает фиксацию выбранного режима, для исключения самопроизвольной смены режимов при помехах и сбоях, за счет построения на энергонезависимых элементах памяти (в частном случае это может быть механический переключатель на несколько направлений).
Блок 18 воздействует на стационарную ЭВМ 4 АРМ-ДНЦ, которая с установленной периодичностью запрашивает у АСОУП необходимые параметры, индивидуально для каждого поезда. Информация, передаваемая от ДНЦ по рассмотренным выше каналам связи в устройства автоведения, позволяет машинисту оптимальнее вести поезд, как в автоматическом, так и в ручном режиме. В ручном режиме ведения поезда, параметры движения, передаваемые системой от ДНЦ и отображаемые визуализатором обстановки 9, носят рекомендательный характер.
Система в целом обеспечивает, значительное, по сравнению с известными аналогами, повышение эффективности диспетчерского управления, за счет повышения точности выполнения графика движения поездов, повышения пропускной и провозной способности перегонов и станций, снижения расхода электроэнергии на тягу и снижения психофизиологической нагрузки на машинистов и диспетчеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2008 |
|
RU2388637C1 |
| СИСТЕМА ДЛЯ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2008 |
|
RU2390456C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2519601C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2013 |
|
RU2541585C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2015 |
|
RU2582431C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2009 |
|
RU2422316C1 |
| Система автоматизированного управления движением поездов | 2022 |
|
RU2784101C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2492090C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2012 |
|
RU2511197C1 |
| Система для управления движением поездов | 2020 |
|
RU2737813C1 |
Изобретение относится к железнодорожному транспорту и может быть использовано в автоматизированных цифровых системах диспетчерского управления железнодорожным транспортом. Система содержит центральный пункт управления и распределенные контролируемые пункты, с размещенными на них устройствами постов ЭЦ и устройствами телеуправления и телесигнализации диспетчерской централизации. На центральном пункте размещена стационарная ЭВМ автоматизированного рабочего места, соединенная через первый интерфейсный модуль с устройствами телеуправления и телесигнализации диспетчерской централизации и через второй интерфейсный модуль связанная с системой управления перевозками. На локомотивах установлена система автоведения состава, включающая в себя ЭВМ, соединенную с визуализатором, силовой установкой локомотива и устройством автоматической локомотивной сигнализации. На локомотиве также установлены подключенные к бортовой ЭВМ бортовые радиомодемы, соединенные с антенными блоками. На центральном пункте управления и на контролируемых пунктах размещены стационарные радиомодемы, соединенные со стационарными антенными блоками, и контроллеры связи, которые своими первыми портами, через модемы, подключены к магистральной линии связи, а вторыми портами соединены со стационарными радиомодемами. На центральном пункте управления контроллер связи соединен со стационарной ЭВМ рабочего места, к отдельному порту которой подключен блок управления режимами оптимизации параметров организации движения поездов. Технический результат заключается в повышении эффективности диспетчерского управления, пропускной и провозной способности перегонов и станций, снижении расхода электроэнергии на тягу и снижении психофизиологической нагрузки на машинистов и диспетчеров. 2 ил.
Система управления движением поездов при диспетчерской централизации, содержащая центральный пункт управления и распределенные контролируемые пункты с размещенными на них устройствами постов ЭЦ и связанными с ними устройствами телеуправления и телесигнализации диспетчерской централизации, объединенные магистральной линией связи, при этом на центральном пункте управления размещена стационарная ЭВМ автоматизированного рабочего места поездного диспетчера, соединенная через первый интерфейсный модуль с устройствами телеуправления и телесигнализации диспетчерской централизации и через второй интерфейсный модуль связанная с автоматизированной системой оперативного управления перевозками, причем на локомотивах, вовлеченных в систему управления, установлена система автоведения состава, включающая в себя бортовую ЭВМ, соединенную с визуализатором обстановки, силовой установкой локомотива и устройством автоматической локомотивной сигнализации с автостопом, а также установлены подключенные к бортовой ЭВМ бортовые радиомодемы цифрового радиоканала связи, соединенные с бортовыми антенными блоками, а на центральном пункте управления и распределенных контролируемых пунктах размещены стационарные радиомодемы цифрового радиоканала связи, соединенные со стационарными антенными блоками, отличающаяся тем, что на центральном пункте управления и распределенных контролируемых пунктах введены контроллеры связи с функциями накопления и преобразования информации, которые своими первыми портами через модемы подключены к магистральной линии связи, а вторыми портами соединены со стационарными радиомодемами цифрового радиоканала связи, при этом на центральном пункте управления контроллер связи с функциями накопления и преобразования информации соединен со стационарной ЭВМ автоматизированного рабочего места поездного диспетчера, к отдельному порту которой подключен блок управления режимами оптимизации параметров организации движения поездов с функцией фиксации выбранного режима энергонезависимыми элементами памяти.
| Кравцов Ю.А | |||
| и др | |||
| Системы железнодорожной автоматики и телемеханики | |||
| - М.: Транспорт, 1996, с.255, рис.8.1, рис.8.1, с.304, рис.8.25 | |||
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| US 6799097 В2, 28.09.2004 | |||
| US 2004172175 A1, 02.09.2004 | |||
| ЗАЩЕЛКИВАЮЩАЯСЯ МЕТАЛЛИЧЕСКАЯ ПУГОВИЦА | 1935 |
|
SU47123A1 |

