Изобретение относится к устройствам и способам определения на борту космического объекта (КО) координат места пробоя высокоскоростными микрометеороидными или техногенными частицами гермооболочки КО.
Известно устройство для определения места течи в трубопроводе [1], содержащее два акустических датчика, один из которых присоединен к трубопроводу и акустически экранирован от акустических волн в окружающей среде, а второй акустический датчик располагается вне оболочки трубопровода для приема акустических волн только в окружающей среде. Невозможность использования технического решения [1] на борту КО обусловлена размещением второго акустического датчика в окружающей среде вне оболочки КО, т.е. в вакууме, по которому, как известно, акустические волны не распространяются. Таким образом, техническое решение [1] не может быть использовано на КО.
Известны и широко применяются на борту КО системы измерения давления, состоящие из одного и более датчиков давления, размещенных в гермообъеме КО [2], предназначенные для определения факта пробоя за счет измерения постоянной составляющей давления газа, заполняющего внутренний объем КО. Датчики давления обеспечивают надежную регистрацию падения давления при внезапной разгерметизации гермооболочки КО. Устройство внедрено на борту Служебного модуля (СМ) Международной космической станции (МКС).
К недостаткам этого технического решения следует отнести невозможность определения координат места пробоя.
Известны применяемые на борту КО течеискатели [3], состоящие из ультразвукового датчика давления и преобразователя высокочастотных колебаний в звуковой диапазон, слышимый для слуха человека. Течеискатели обеспечивают обнаружение места пробоя за счет выявления повышенных уровней ультразвуковых колебаний вблизи пробойного отверстия. Это техническое решение [3] принято авторами за прототип.
Устройство внедрено на борту Служебного модуля МКС. К недостаткам этого решения относится отсутствие оперативности обнаружения места пробоя, т.к. необходимо обследовать всю поверхность гермооболочки КО.
Известен способ определения координат места пробоя гермооболочки КО за счет выявления повышенных уровней ультразвуковых колебаний вблизи пробойного отверстия [3].
К недостаткам этого технического решения относится отсутствие оперативности обнаружения места пробоя из-за необходимости обследования всей поверхности гермооболочки КО.
Прототипа предлагаемого способа определения координат места пробоя не обнаружено.
Задачей изобретения является оперативное, в темпе пробоя, определение координат места пробоя гермооболочки пилотируемого КО высокоскоростными микрометеороидными или техногенными частицами и минимизация погрешности определения координат места пробоя за счет оптимального расположения датчиков давления без загромождения гермообъема КО.
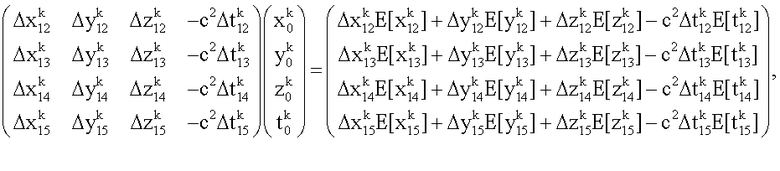
Задача решается таким образом, что в устройство, содержащее датчик давления, введены дополнительно пять датчиков давления, которые размещены в гермообъеме КО, так что любые четыре из шести датчиков давления располагаются попарно вблизи наиболее удаленных друг от друга стенок гермообъема, причем отрезки линий, соединяющие каждую упомянутую пару датчиков, скрещиваются, а сами датчики внутри этих пар разнесены друг от друга на максимально возможное расстояние, при этом оставшиеся два датчика давления размещаются каждый вблизи противоположных стенок гермообъема КО на наименьшем расстоянии от центра гермообъема, так что координаты места пробоя определяются из соотношений:

где с - скорость звука;
 - искомые координаты точки пробоя;
- искомые координаты точки пробоя;
 - искомое время испускания звуковой волны;
- искомое время испускания звуковой волны;




где:
 - координаты i-того датчика из k-той пятерки датчиков;
- координаты i-того датчика из k-той пятерки датчиков;
 - время прихода волны к i-тому датчику из k-той пятерки датчиков;
- время прихода волны к i-тому датчику из k-той пятерки датчиков;
 ;
;  ;
;  ;
;  ;
;
i - целые; i=1,…,5; k - целые; k=1,…,6,
где:
mod(i+k, 6) - остаток от целочисленного деления (i+k) на 6;
xj, yj, zj - координаты j-того датчика;
tj - время прихода волны к j-тому датчику;
j - целые;
j=1…,6.
||Аk||→max,
где ||Аk|| - модуль определителя системы линейных уравнений, составленной для k-той пятерки датчиков давления;
k - целые; k=1…6.
Задача решается также способом для определения координат места пробоя гермооболочки пилотируемого КО космическими частицами, в котором определяют и запоминают координаты шести датчиков давления в заданной системе координат, фиксируют времена прихода звуковой волны к каждому (j-тому) датчику, а координаты места пробоя определяют из соотношений:
где с - скорость звука;
 - искомые координаты точки пробоя;
- искомые координаты точки пробоя;
- искомое время испускания звуковой волны;
где:
 - координаты i-того датчика из k-той пятерки датчиков;
- координаты i-того датчика из k-той пятерки датчиков;
- время прихода волны к i-тому датчику из k-той пятерки датчиков;
; ; ; ;
i - целые; i=1,…,5; k - целые; k=1,…,6,
где:
mod(i+k, 6) - остаток от целочисленного деления (i+k) на 6;
xj, уj, zj - координаты j-того датчика;
tj - время прихода волны к j-тому датчику;
j - целые; j=1,…,6.
||Аk||→max,
где ||Аk|| - модуль определителя системы линейных уравнений, составленной для k-той пятерки датчиков давления;
k - целые; k- 1…6.
Техническими результатами изобретения являются:
- оперативное, в темпе пробоя, определение координат места пробоя;
- оптимальное расположение датчиков для минимизации погрешности определения координат места пробоя без загромождения гермообъема КО.
Сущность изобретения иллюстрируется следующими чертежами:
на фиг.1 приведена схема размещения датчиков давления в гермообъеме космического объекта;
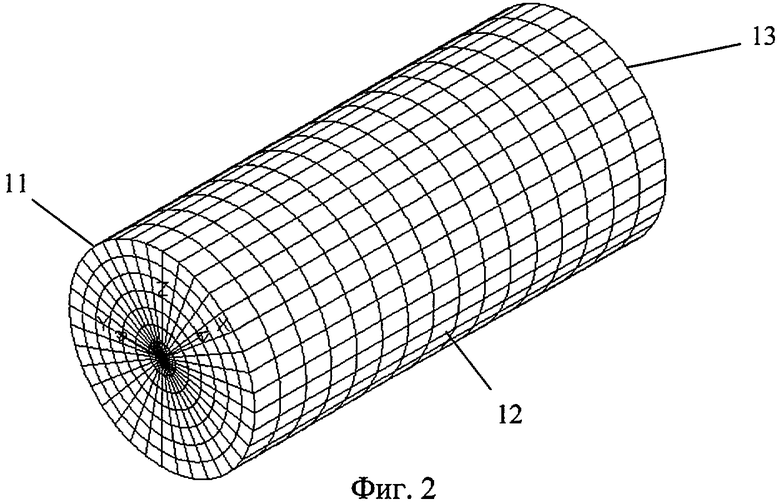
на фиг.2 приведена структура расчетной сетки по теоретически возможным местам пробоя на цилиндрической модели КО;
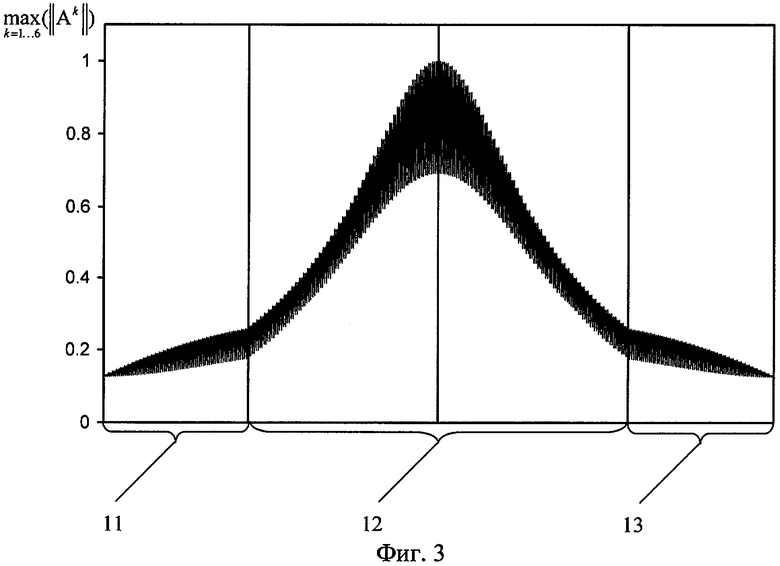
на фиг.3 приведены максимальные по всем сочетаниям пяти из шести датчиков давления приведенной на фиг.1 схемы их расположения нормированные модули определителей систем линейных уравнений, составленных по теоретически возможным местам пробоя, расположенным в узлах расчетной сетки цилиндрической модели КО;
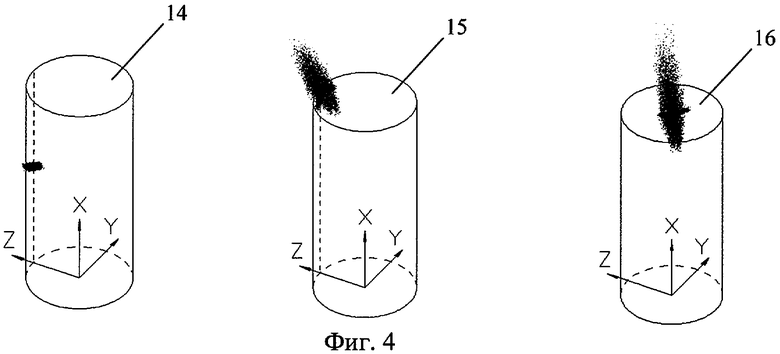
на фиг.4 представлены расчеты погрешностей определения положения теоретически возможных мест пробоя на цилиндрической модели методом Монте-Карло;
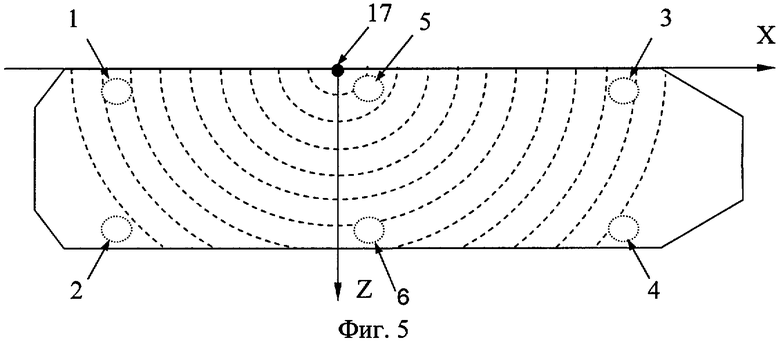
на фиг.5 показано расположение датчиков на экспериментальной установке по определению координат места пробоя высокоскоростной частицей стенки, моделирующей гермооболочку КО;
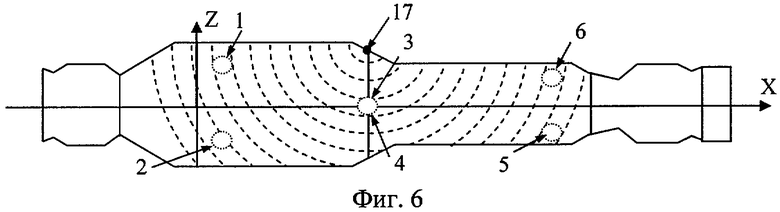
на фиг.6 показано расположение датчиков в проведенном на комплексном стенде Служебного модуля эксперименте по определению координат места пробоя с использованием имитатора пробоя;
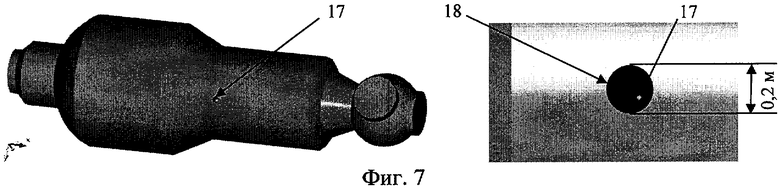
на фиг.7 показана погрешность определения координат места пробоя в центральной области Служебного модуля,
где:
1, 2, 3, 4, 5, 6 - датчики давления;
7 - центр гермообъема космического объекта;
8 - стенки гермообъема космического объекта;
9 - скрещивающиеся прямые;
10 - декартова система координат;
11 - передний торец цилиндрической модели КО;
12 - цилиндрическая поверхность цилиндрической модели КО;
13 - задний торец цилиндрической модели КО;
14 - цилиндрическая модель КО с теоретически возможным местом пробоя на цилиндрической поверхности;
15 - цилиндрическая модель КО с теоретически возможным местом пробоя на кромке торца;
16 - цилиндрическая модель КО с теоретически возможным местом пробоя в центре торца;
17 - место пробоя;
18 - погрешность определения координат места пробоя.
При пробое либо соударении высокоскоростной микрометеороидной или техногенной частицы с гермооболочкой КО в воздушной среде гермообъема в месте пробоя возникает ударная волна, которая на некотором расстоянии от этого места, зависящем от энергии взаимодействия частицы с преградой, вырождается в звуковую волну и распространяется далее с известной скоростью звука.
В гермообъеме КО согласно схеме устройства, приведенной на фиг.1, датчики давления 1, 2, 3, 4 устанавливаются попарно вблизи наиболее удаленных друг от друга стенок 8 гермообъема КО на скрещивающихся прямых 9 так, чтобы расстояния между датчиками в парах были максимальными. Датчики 5 и 6 устанавливаются вблизи противоположных стенок 8 гермообъема КО на наименьшем расстоянии от центра гермообъема 7. Согласно способу определяют и запоминают координаты xj, yj, zj каждого (j-того) датчика в декартовой системе координат 10, связанной с космическим объектом (j=1,…,6).
В момент времени прохождения фронта звуковой волны датчик реагирует заметным повышением амплитуды сигнала на выходе усилителя по сравнению с фоновым шумом работающего на борту КО оборудования. Сигналы с датчиков опрашиваются с помощью многоканальной аналого-цифровой платы (АЦП), подсоединенной к персональному компьютеру (ПК). Согласно способу времена прихода волны tj к каждому (j-тому) датчику фиксируются на ПК в моменты времени превышений сигналами заранее заданных пороговых уровней по каждому (j-тому) каналу АЦП.
При реакции шести датчиков на прохождение фронта звуковой волны за определенный промежуток времени, равный максимально возможному времени распространения звуковой волны внутри гермообъема КО, производится расчет на ПК координат места пробоя по формуле:
где с - скорость звука;
 - искомые координаты точки пробоя;
- искомые координаты точки пробоя;
- искомое время испускания звуковой волны;
где:
 - координаты i-того датчика из k-той пятерки датчиков;
- координаты i-того датчика из k-той пятерки датчиков;
- время прихода волны к i-тому датчику из k-той пятерки датчиков;
; ; ; ;
i - целые, i=1…,5; k - целые; k=1,…,6,
где:
mod(i+k, 6) - остаток от целочисленного деления (i+k) на 6;
xj, yj, zj - координаты j-того датчика;
tj - время прихода волны k j-тому датчику;
j - целые; j=1,…,6.
||Аk||→max,
где ||Аk|| - модуль определителя системы линейных уравнений, составленной для k-той пятерки датчиков давления;
k - целые; k - 1…6.
Согласно предложенному устройству и способу из шести датчиков давления формируется сочетаниями шесть пятерок датчиков, для каждой (k-той) из которых составляется своя (k-тая) система линейных уравнений. Определяемые интегрально с наименьшей погрешностью координаты места пробоя  будут соответствовать k-той системе линейных уравнений, модуль определителя ||Аk||которой является максимальным.
будут соответствовать k-той системе линейных уравнений, модуль определителя ||Аk||которой является максимальным.
Схема расположения датчиков давления согласно устройству (фиг.1) обеспечивает интегрально определение с наименьшей погрешностью координат теоретически возможных мест пробоя, равновероятно распределенных на всей поверхности гермооболочки модуля, по отношению к другим возможным положениям датчиков давления.
Численные расчеты по оптимальному расположению датчиков проводились на цилиндрической модели космического объекта. Выбранные размеры цилиндрической модели приблизительно соответствуют реальным геометрическим размерам космических объектов, используемых на практике (например, Служебный модуль МКС). Длина цилиндра составляет 9 м, диаметр - 4,1 м. Данная цилиндрическая модель была покрыта сеткой с максимальным шагом ~0,1 м.
На фиг.2 приведена структура сетки. В узлах сетки были размещены теоретически возможные места пробоя, для каждого из которых рассчитывались времена прихода звуковой волны к датчикам давления при условии прямолинейного беспрепятственного распространения волны от источника к приемникам.
Чтобы не загромождать гермообъем, датчики размещались вблизи стенок вписанного в цилиндрическую модель параллелепипеда, стороны которого моделируют стенки гермообъема реального КО (тот же пример Служебного модуля МКС).
Согласно предложенному устройству и способу координаты теоретически возможных мест пробоя определяются из решения системы линейных уравнений. В реальных условиях исходные данные, подставляемые в систему, имеют погрешности, которые приводят к погрешности определения координат места пробоя. Необходимо максимизировать устойчивость системы линейных уравнений за счет размещения датчиков давления. Известно, что близкий к нулю определитель соответствует неустойчивой системе линейных уравнений, поэтому в качестве критерия устойчивости системы линейных уравнений был выбран модуль определителя ||A||. Максимизация модулей определителей ||A|| систем линейных уравнений, составленных по всем теоретически возможным местам пробоя на гермооболочке космического объекта, была выбрана в качестве критерия оптимальности размещения датчиков давления в гермообъеме.
Как уже было упомянуто выше, шесть датчиков давления сочетается в шесть пятерок датчиков, для каждой из которых составляется своя система линейных уравнений. Координаты места пробоя ,определяемые интегрально с наименьшей погрешностью, соответствуют системе линейных уравнений, составленной по k-той пятерке датчиков давления, модуль определителя ||Ak|| которой является максимальным. Таким образом, необходимо за счет размещения датчиков максимизировать максимальные определители ||Ak|| систем линейных уравнений, составленных по всем теоретически возможным местам пробоя на гермооболочке космического объекта.
На фиг.3 приведены максимальные нормированные модули определителей ||Ak|| систем линейных уравнений, составленных по теоретически возможным местам пробоя, равномерно распределенным на цилиндрической поверхности модуля, для оптимальной схемы размещения 6 датчиков, показанной на фиг.1. По оси абсцисс на фиг.3 отложена циклическая развертка теоретически возможных мест пробоя по узлам расчетной сетки фиг.2, начиная с центра переднего торца 11 цилиндрической модели и кончая центром заднего торца 13.
На фиг.4 представлены расчеты по определению координат теоретически возможных мест пробоя в центральной 14 и торцевых 15, 16 областях цилиндрической модели космического объекта с внесением случайных погрешностей в исходные данные (метод Монте-Карло).
Как видно из фиг.4, в центральной области цилиндрической модели 14, где модули определителей максимальны (см. 12 на фиг.3), наблюдается наибольшая устойчивость расчетной схемы к вносимым в исходные данные случайным погрешностям, что подтверждает верность выбранного критерия максимизации модулей определителей систем линейных уравнений.
Интервалы равномерно распределенных случайных погрешностей, вносившихся в исходные данные по методу Монте-Карло, составляют:
- для скорости звука - ±3 м/с;
- для координат датчиков - ±0,1 м;
- для моментов времени прохождения фронта звуковой волны - ±2·10-5 с.
Проведены предварительные испытания на экспериментальной установке, размеры гермообъема которой сопоставимы со Служебным модулем МКС, с осуществлением реального пробоя стенки, моделирующей гермооболочку КО, высокоскоростной частицей (V ~ 5 км/с). На фиг.5 приведена схема экспериментальной установки, на которой показано в проекциях расположение 5 датчиков в гермообъеме установки и приведено положение точки пробоя 17.
В итоге в испытаниях с реальным пробоем стенки, моделирующей гермооболочку КО, координаты места пробоя определялись в темпе пробоя в течение менее 1 с после пробоя, а погрешность определения координат места пробоя составила ~ 0,1 м, что является приемлемым для практического применения устройства и способа оперативного определения координат точки пробоя на борту пилотируемых космических объектов.
Также проведены предварительные испытания на борту комплексного стенда Служебного модуля МКС с использованием имитатора импульсной звуковой волны пробоя. На фиг.6 приведена схема расположения 6 датчиков в гермообъеме модуля Служебного модуля МКС.
Как и ожидалось, во время испытаний наилучшие результаты получены в центральной области СМ, где погрешность определения координат места пробоя не превышает 0,1 м. На фиг.7 на трехмерной модели СМ показана погрешность 18 определения координат места пробоя 17.
В итоге удалось обеспечить погрешность определения координат точки пробоя, не превышающую 0,5 м в периферийной части СМ и порядка 0,1 м в его центральной части, что является вполне приемлемым для практического применения разработанной методики обнаружения точки пробоя на борту Служебного модуля МКС с целью оперативного устранения последствий столкновения модуля с высокоскоростной частицей. Оперативность определения координат места пробоя осталась как и в испытаниях с реальным пробоем ~ 1 с, так как геометрические размеры гермообъемов в обоих типах испытаний были схожими.
Литература
1. Патент RU 25943, МПК G01M 3/24.
2. В.Истомин, «Хроника полета экипажа МКС-1», 6 февраля, 99-е сутки, «Новости космонавтики», 2001 г.
3. В.В.Борисов и др. Перспективы применения дистанционных средств для обнаружения мест негерметичности конструкции Международной космической станции и контроля ее состояния. - Космонавтика и ракетостроение, №4(49), 2007 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТА ПРОБОЯ ГЕРМООБОЛОЧКИ НЕПИЛОТИРУЕМОГО КОСМИЧЕСКОГО ОБЪЕКТА КОСМИЧЕСКИМИ ЧАСТИЦАМИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТА ПРОБОЯ | 2008 |
|
RU2387965C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТА ПРОБОЯ КОРПУСА ГЕРМООТСЕКА КОСМИЧЕСКОГО ОБЪЕКТА ЧАСТИЦЕЙ ПРИРОДНОГО ИЛИ ТЕХНОГЕННОГО ПРОИСХОЖДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2583251C2 |
| СПОСОБ ОПЕРАТИВНОЙ ГЕРМЕТИЗАЦИИ ПРОБОЙНОГО ОТВЕРСТИЯ В КОРПУСЕ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2568514C1 |
| Устройство для оперативной герметизации пробойного отверстия в корпусе космического аппарата | 2019 |
|
RU2706670C1 |
| Устройство герметизации дефектов оболочек космических аппаратов | 2019 |
|
RU2721360C1 |
| УСТРОЙСТВО ЗАЩИТЫ ОБИТАЕМЫХ ОБЪЕКТОВ ОТ УДАРНОГО ВОЗДЕЙСТВИЯ ЧАСТИЦ КОСМИЧЕСКОЙ СРЕДЫ | 2023 |
|
RU2819145C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ МЕСТА УТЕЧКИ ВОЗДУХА ИЗ МОДУЛЕЙ КОСМИЧЕСКОГО АППАРАТА | 2000 |
|
RU2189074C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ С КОСМИЧЕСКОГО АППАРАТА КООРДИНАТ ИСТОЧНИКА КОЛЬЦЕВЫХ ВОЛН НА ВОДНОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2640944C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ ИЛИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2620288C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ ИЛИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2620448C1 |
Изобретение относится к области космической техники и предназначено для определения на борту космического объекта координат места пробоя высокоскоростной микрометеороидной или техногенной частицей гермооболочки модуля космического объекта. Техническим результатом изобретения является оперативное, в темпе пробоя, определение координат места пробоя и минимизация погрешности определения координат места пробоя за счет оптимального расположения датчиков давления внутри гермообъема пилотируемого космического объекта без загромождения гермообъема. Этот результат обеспечивается за счет того, что размещают шесть датчиков давления внутри гермообъема пилотируемого космического объекта, координируют их в системе координат космического объекта и фиксируют моменты времени прохождения фронта звуковой волны датчиками давления, а место пробоя определяют из приведенных в формуле изобретения соотношений. 2 н.п. ф-лы, 7 ил.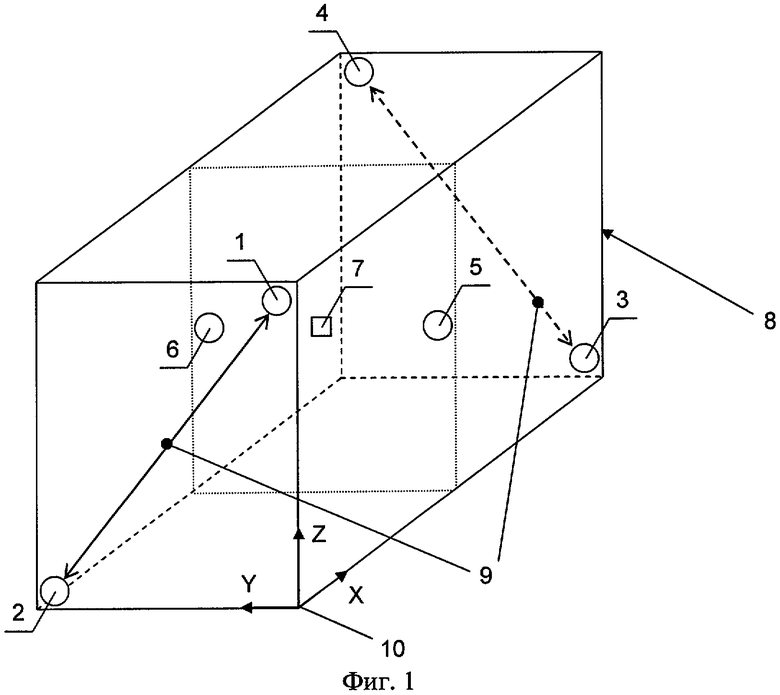
1. Устройство определения координат места пробоя гермооболочки пилотируемого космического объекта космическими частицами, содержащее датчик давления, отличающееся тем, что введены дополнительно пять датчиков давления, которые размещены в гермообъеме космического объекта так, что любые четыре из шести датчиков давления располагаются попарно вблизи наиболее удаленных друг от друга стенок гермообъема, причем отрезки линий, соединяющие каждую упомянутую пару датчиков, скрещиваются, а сами датчики внутри этих пар разнесены друг от друга на максимально возможное расстояние, при этом оставшиеся два датчика давления размещаются каждый вблизи противоположных стенок гермообъема космического объекта на наименьшем расстоянии от центра гермообъема, так что координаты места пробоя определяются из соотношений
где с - скорость звука;
 ,
,  ,
,  - искомые координаты точки пробоя;
- искомые координаты точки пробоя;
 - искомое время испускания звуковой волны;
- искомое время испускания звуковой волны;




где 

 - координаты i-го датчика из k-й пятерки датчиков;
- координаты i-го датчика из k-й пятерки датчиков;
 - время прихода волны к i-му датчику из k-й пятерки датчиков;
- время прихода волны к i-му датчику из k-й пятерки датчиков;
i=…, 5; k=1, …, 6, целые;
где mod(1i+k, 6) - остаток от целочисленного деления (i+k) на 6;
xj, yj, zj - координаты j-го датчика;
tj - время прихода волны к j-му датчику;
j=1,…,6; целые;
||Ak||→max
где ||Ak|| - модуль определителя системы линейных уравнений, составленной для k-й пятерки датчиков давления.
2. Способ определения координат места пробоя гермооболочки пилотируемого космического объекта космическими частицами, отличающийся тем, что определяют и запоминают координаты шести датчиков давления в заданной системе координат, фиксируют времена прихода звуковой волны i каждому (i-му) датчику, а место пробоя определяют из соотношения
где с - скорость звука;
, , - искомые координаты точки пробоя;
- искомое время испускания звуковой волны;




где 

 - координаты i-го датчика из k-й пятерки датчиков;
- координаты i-го датчика из k-й пятерки датчиков;
 - время прихода волны к i-му датчику из k-й пятерки датчиков;
- время прихода волны к i-му датчику из k-й пятерки датчиков;
i=1,…, 5; целые; k=1,…, 6, целые;
где mod(i-k, 6) - остаток от целочисленного деления (i+k) на 6;
xj, yj, zj. - координаты j-го датчика;
tj - время прихода волны к j-му датчику;
j=1,…, 6; целые;
||Ak||→max
где ||Ak|| - модуль определителя системы линейных уравнений, составленной для k-й пятерки датчиков давления;
k=1…6, целые.
| БОРИСОВ В.В.и др | |||
| Перспективы применения дистанционных средств для обнаружения мест негерметичности конструкции международной космической станции и контроля ее состояния | |||
| - Космонавтика и ракетостроение | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| RU 2004108125 A, 27.03.2005 | |||
| JP 6242083 A, 02.09.1994 | |||
| JP 4297400 A, 21.10.1992. | |||

