Изобретение относится к космической технике и может быть использовано при определении координат источника кольцевых волн на водной поверхности с космического аппарата (КА).
Космические съемки играют все возрастающую роль в различных научных и прикладных областях. Для использования получаемых снимков необходимо уметь опознавать изображенные на них объекты. Чаще всего фотографирование осуществляется съемочными системами, жестко закрепленными на борту КА. Современные КА могут наводиться на заданные районы наблюдения с точностью десятков угловых секунд [1], А.И.Бакланов «Анализ состояния и тенденции развития систем наблюдения высокого и сверхвысокого разрешения. // Вестник Самарского государственного аэрокосмического университета, №2, 2010 г.
Положение КА на орбите определяется с помощью спутниковых навигационных систем с точностью 10-15 метров [2], Б.Б. Серапинас. Глобальные системы позиционирования: Учеб. Изд. – М.: ИКФ «Каталог», 2002 г. Это позволяет определить с высокой точностью фотографируемый район и затем с помощью карты опознать сфотографированные объекты.
В ряде случаев данный способ определения координат фотографируемых объектов не может быть применен. Например, при низкой точности ориентации КА или низкой точности знания углового положения съемочной системы относительно осей КА. Это может возникнуть при появлении нештатной ситуации на автоматическом КА или при выполнении съемки ручными камерами космонавтами с пилотируемого корабля или орбитальной станции.
При съемке ручными камерами ориентация съемочной системы не известна. Это затрудняет опознавание не только фотографируемых объектов, но и даже фотографируемых районов. Вместе с тем съемка ручными камерами широко используется космонавтами, особенно в длительных полетах на орбитальных станциях [3], В.В.Лебедев. Материалы научных исследований бортинженера «Союз Т-5» - «Салют-7» - «Прогресс». М., «Наука, 2001 г., 347 с.
Известен способ определения координат фотографируемых с космического аппарата объектов на Земле, включающий регистрацию объекта на снимке и идентификацию характерного объекта [3], В.В.Лебедев. Материалы научных исследований бортинженера «Союз Т-5» - «Салют-7» - «Прогресс». М., «Наука, 2001 г., 347 с. Этот способ выбран в качестве прототипа. Этот способ может использоваться и для регистрации кольцевых волн, однако определение их координат вызывает при этом трудности.
В качестве характерных объектов обычно выбирается крутой излом реки, характерный излом берега озера и т.п. Если опознаваемый объект сам имеет характерные черты, то это облегчает процесс его идентификации. После опознавания фотографируемого объекта определяют с использованием карты его координаты. Отсутствие характерных черт на фотографируемом объекте делает затруднительным, а иногда и невозможным решение этой задачи способом - прототипом.
Особенно сложным является определение координат фотографируемых объектов на водной поверхности. Одна из таких задач заключается в определении с КА координат источника кольцевых волн, образующихся на водной поверхности. Как показывает многолетняя практика наблюдений с КА поверхности морей и океанов, кольцевые волны нередко возникают на водной поверхности. Их источником могут быть как искусственные (техногенные), так и естественные (вулканы, землетрясения и т.д.) воздействия. При появлении на водной поверхности кольцевых волн возникает задача определения координат источника их образования.
Задачей, на решение которой направлено настоящее изобретение, является надежное и точное определение с КА координат источника кольцевых волн на водной поверхности при неизвестной ориентации съемочной системы.
Технический результат предлагаемого изобретения заключается в оперативном, надежном и точном определении с КА координат источника кольцевых волн на водной поверхности даже при неизвестной ориентации съемочной системы.
Технический результат достигается тем, что в способе определения с космического аппарата координат источника кольцевых волн на водной поверхности, включающем регистрацию кольцевых волн на снимке, регистрируют на снимке одновременно с кольцевыми волнами часть суши, выбирают и идентифицируют на снимке не менее четырех характерных объектов, расположенных на суше и не лежащих на одной прямой, производят ортотрансформирование снимка, фиксируют на ортотрансформированном снимке не менее трех точек, лежащих на изображении кольцевой волны, определяют по ортотрансформированному снимку координаты фиксированных точек и определяют координаты источника кольцевых волн х0, у0 по формуле

где 
х1, у1; х2, у2; х3, у3 - координаты точек на изображении кольцевой волны, определяющих вершины треугольника максимальной площади.
За счет выполнения предлагаемых действий определение с КА источника кольцевых волн на водной поверхности осуществляется оперативно, надежно и точно даже при неизвестной ориентации съемочной системы.
Первоначально осуществляется ортотрансформирование снимка.
Суть предлагаемого изобретения поясняют фиг. 1, фиг. 2 и фиг. 3.
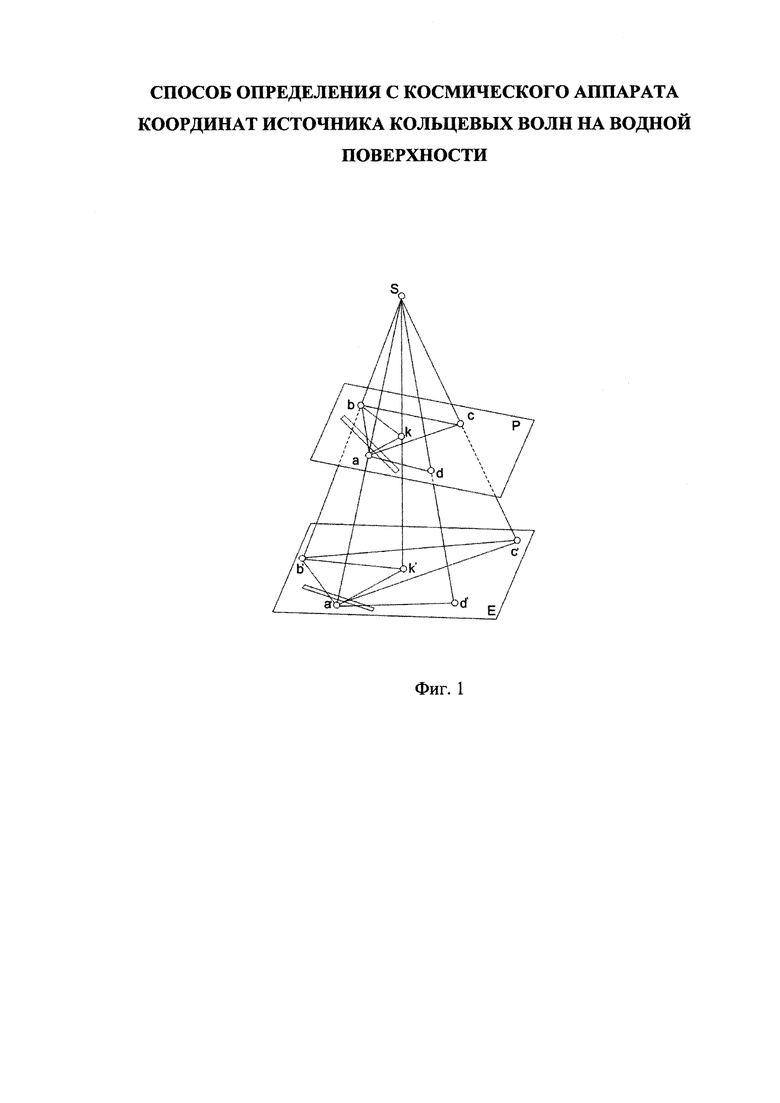
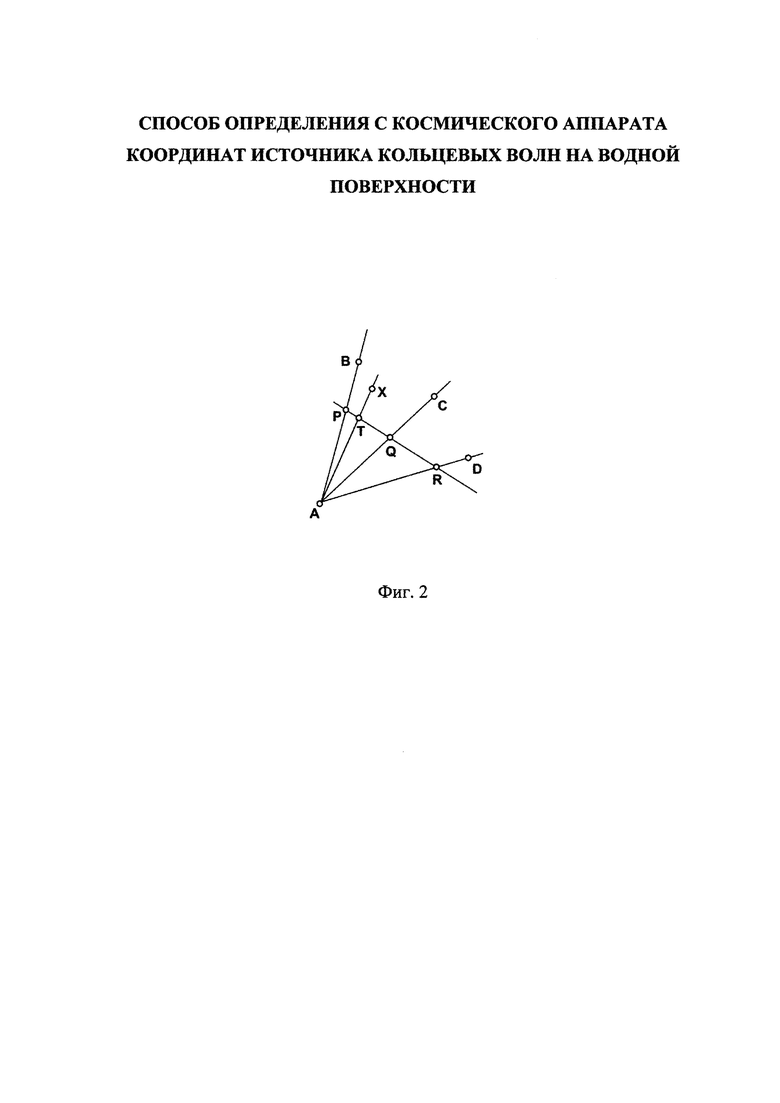
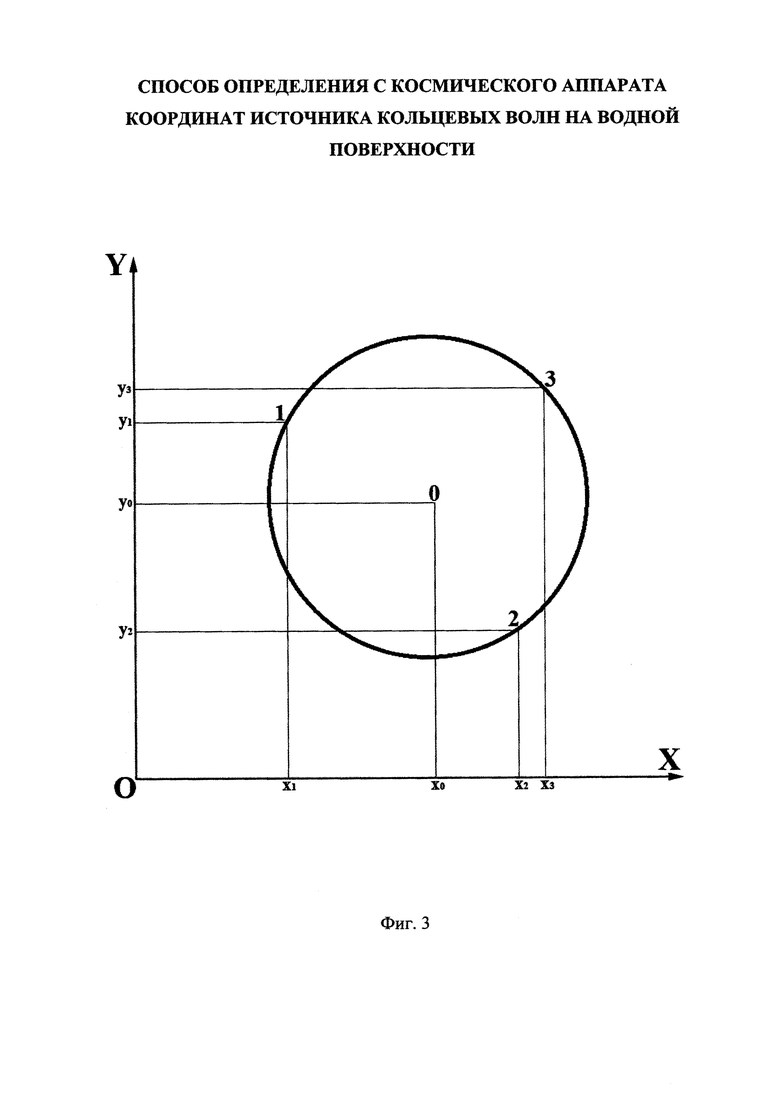
Фиг. 1 и Фиг. 2 поясняют процедуру ортотрансформирования снимка. Фиг. 3 поясняет процедуру нахождения координат источника кольцевых волн.
На фиг. 1 обозначено:
S - точка, из которой выполняется съемка;
Р - плоскость снимка;
Е - плоскость ортофотоплана;
а, в, с, d и  - общие (гомологичные) точки на снимке и ортофотоплане соответственно, соответствующие выбранным и идентифицированным объектам, расположенным на части суши,
- общие (гомологичные) точки на снимке и ортофотоплане соответственно, соответствующие выбранным и идентифицированным объектам, расположенным на части суши,
к - точка на снимке, соответствующая любому опознаваемому фотографируемому объекту;
 - точка на ортофотоплане, соответствующая опознаваемому фотографируемому объекту.
- точка на ортофотоплане, соответствующая опознаваемому фотографируемому объекту.
На фиг. 2 обозначено:
X - искомая точка, соответствующая опознаваемому фотографируемому объекту;
А, В, С, D - опорные точки, соответствующие выбранным и идентифицированным объектам.
Считаем, что снимок представляет собой изображение земной поверхности в центральной проекции, а ортофотоплан - в ортогональной проекции, при этом сам снимок и план представляют собой двумерные массивы числовых значений цвета и яркости каждой точки. Для цифрового снимка - это зафиксированное значение каждой точки матрицы с постоянной зарядовой связью.
Положение всех остальных точек снимка на ортофотоплане определяется исходя из изложенных ниже следующих положений.
Примем одну из заданных гомологичных точек, например точку а, за полюс и построим из нее веер лучей на точки b, с, d и k в плоскости Р. Также построим веер лучей из точки а' на заданные точки b', с' d' в плоскости Е. Эти два веера взаимно перспективны, так как для четырех заданных точек, определяющих соответственные лучи вееров, в том числе и для полюсов а и а' взаимная перспективность восстановлена.
Тогда, используя свойство постоянства двойного отношения в перспективных веерах, найдем в плоскости Е направление а'k', взаимно перспективное направлению аk плоскости Р.
Примем теперь за полюс точку b и проведем из нее веер лучей на точки а, d, k, с. Соединив точку b' с заданными точками а', d', с', получим вторую пару взаимно перспективных вееров в плоскостях Р и Е. Перенесем направление bk на плоскость Е. Полученное направление b'k' пересечет направление а'k' в искомой точке k'.
Точка k' будет взаимно перспективна точке k, и обе эти точки будут лежать на одном проектирующем луче Skk'. Действительно, поскольку лучи аk и а'k', а также bk и b'k' взаимно перспективны, то они лежат соответственно в проектирующих плоскостях Saa'kk' и Sbb'kk', пересекающихся по прямой Skk', которая и является проектирующим лучом точки k.
Применяя данный способ ко всем точкам исходного снимка, можно определить координаты всех точек снимка (включая центральную и угловые точки снимка) на ортофотоплане, а также «наложить» снимок на ортофотоплан, размещая каждую точку (пиксель) снимка на «своем» месте на ортофотоплане, т.е. заменяя числовые значения данной точки числовым значением точки снимка. При этом снимок будет автоматически приведен к масштабу ортофотоплана и сориентирован по системе его координат. Тем самым будет выполнено ортотрансформирование снимка.
Определение координат произвольной заданной точки снимка X на ортофотоплане производится с помощью построения и на снимке, и на ортофотоплане луча из любой опорной точки, например АХ (фиг. 2, здесь обозначены 4 опорные точки А, В, С, D и искомая точка X). Затем аналогичные построения выполняются относительно другой опорной точки, например, В. Тогда координаты искомой точки X на ортофотоплане можно получить как координаты точки пересечения лучей АХ и ВХ, т.е. решением системы двух линейных уравнений с двумя неизвестными. Луч АХ на ортофотоплане определяется нахождением положения точки Т на произвольной секущей PR, при этом положение самой секущей PR на ортофотоплане и снимке однозначно определяется изначально задаваемыми величинами отрезков PQ и QR как L1 и L2. Как следует из изложенного выше, при одинаковых построениях соотношение отрезков РТ к TR будет одинаково и для снимка, и для ортофотоплана. Для поиска трех неизвестных составляется система трех нелинейных уравнений исходя из следующих условий:
Поскольку точки Р, Q, R лежат на одной прямой, то

Поскольку расстояние между точками Р и Q задано равным L1+L2, то

Поскольку расстояние между точками Р и R равно L1, расстояние между Q и R равно L2, то

Для определения положения секущей PR на снимке и ортофотоплане по сути достаточно найти только координаты Хр, Xq, Хr, так как при этом соответствующие координаты Yp, Yq, Yr определяются, исходя из того, что они лежат на известных и на снимке, и ортофотоплане лучах АВ, AC, AD.
В результате решения этой системы уравнений (например, в частных производных) становятся известны Хр, Yp, Xq, Yq, Xr, Yr.
Координаты точки Т на снимке определяются как координаты точки пересечения полученной прямой PR и известного луча АХ. После этого становится возможным определить и соответствующее положение точки Т на ортофотоплане, так как отношение отрезков РТ к TR становится известно. Получив положение точки T на ортофотоплане (тем самым, определив направление луча АХ), все вычисления повторяются для другой опорной точки, и определяется направление второго луча на искомую точку X, координаты которой на ортофотоплане вычисляются как координаты точки пересечения этих двух лучей.
Применив последовательно описанные действия к другим выбранным и идентифицированным объектам, получим новые значения координат опознаваемого фотографируемого объекта. Понятно, что они будут близки уже найденным, однако вследствие неизбежных ошибок (съемочной системы и выполняемых действий способа) будут немного отличаться при выборе каждых последующих четырех выбранных и идентифицированных объектов. После перебора всех выбранных и идентифицированных объектов координаты опознаваемого фотографируемого объекта снимка определяются как среднее значение найденных таким образом координат.
С помощью описанных действий получается ортотрансформированный снимок. Координаты любой точки на ортотрансформированном снимке известны.
На фиг. 3 обозначено:
1, 2, 3 - фиксируемые на ортотрансформированном снимке точки, лежащие на изображении кольцевой волны;
х1, у1; х2, у2; х3, у3 - координаты фиксированных точек 1, 2, 3;
х0, у0 - искомые координаты источника кольцевых волн.
Координаты х0, у0 определяются в соответствии с фиг. 1 из соотношений: 
Откуда получаем:

где
Точки 1, 2, 3 выбираются таким образом, чтобы треугольник, образованный ими, имел максимальную площадь. Это обеспечит максимальную точность и надежность при определении координат источника кольцевых волн (понятно, что если три точки лежат на одной прямой, то задача не решается; если три точки расположены вблизи прямой, то влияние ошибок будет максимальным и получаемая точность низкой).
В настоящее время технически все готово для реализации предложенного способа, например, на Международной космической станции МКС. На МКС имеется большой выбор ручных съемочных систем, позволяющих через иллюминатор станции получать снимки разрешением до 2÷3 м. Меняя фокусное расстояние съемочной системы и направление визирования, можно обеспечить попадание в кадр части суши с характерными объектами. На МКС в распоряжении космонавтов имеются вычислительные средства, персональные компьютеры. Эти компьютеры оснащены всевозможным математическим обеспечением, набором карт земной поверхности и т.д. Используемые съемочные системы соединяются с компьютером с помощью необходимых интерфейсов. Указанные средства позволяют на борту станции фотографировать объекты и осуществлять их регистрацию; идентифицировать характерные объекты, выбирать характерные объекты, фиксировать направления на объекты из выбранного объекта на снимке и карте на остальные выбранные объекты и опознаваемый фотографируемый объект. Указанные средства позволяют также фиксировать пересечения направлений из выбранных объектов на опознаваемый фотографируемый объект на карте и определять координаты опознаваемого фотографируемого объекта снимка как среднее значение координат пересечения на карте фиксированных направлений на опознаваемый фотографируемый объект.
Предлагаемый способ позволяет, за счет выполнения отличительных действий, определение координат источника кольцевых волн на водной поверхности осуществлять оперативно (даже на борту МКС космонавтами), надежно и точно даже при неизвестной ориентации съемочной системы, находящейся в руках космонавта. Поэтому, в случае возникновения техногенных (авария и взрыв подводной лодки и т.д.) или природных (извержение вулкана, землетрясение и др.) катастроф в океане, космонавт сможет, выполнив снимок волн на водной поверхности, определить координаты источника волн. Эти координаты могут быть сообщены соответствующим службам и использоваться также для планирования наблюдений с КА.
ЛИТЕРАТУРА
1. А.И. Бакланов «Анализ состояния и тенденции развития систем наблюдения высокого и сверхвысокого разрешения. // Вестник Самарского государственного аэрокосмического университета, №2, 2010 г.
2. Б.Б. Серапинас. Глобальные системы позиционирования: Учеб. Изд. - М.: ИКФ «Каталог», 2002 г., 106 с.
3. В.В. Лебедев. Материалы научных исследований бортинженера «Союз Т-5» - «Салют-7» - «Прогресс». М., «Наука, 2001 г., 347 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ФОТОГРАФИРУЕМЫХ С КОСМИЧЕСКОГО АППАРАТА ЗЕМНЫХ ОБЪЕКТОВ | 2014 |
|
RU2587539C2 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711775C1 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2712781C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЁМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711834C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЕМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2709978C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНЫХ ОБЪЕКТОВ ПРИ ФОТОСЪЁМКЕ С БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2726902C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕМЕННОЙ ПРИВЯЗКИ ПРОИЗВОДИМЫХ С КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ЗЕМНОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2654883C2 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ИЗГОТОВЛЕНИЯ ЦИФРОВЫХ ПЛАНОВ И КАРТ | 2007 |
|
RU2371768C2 |
Изобретение относится к методам наблюдения планеты из космоса и обработки результатов этого наблюдения. Способ включает регистрацию на снимке кольцевых волн, одновременно с которыми регистрируют часть суши, выбирая и идентифицируя на ней не менее четырех характерных объектов, не лежащих на одной прямой. Затем производят ортотрансформирование снимка (преобразование изображения от центральной к ортогональной проекции). Фиксируют на полученном снимке (ортофотоплане) не менее трех точек, лежащих на изображении кольцевой волны, и определяют по этому снимку координаты данных точек. Координаты источника кольцевых волн определяют по конечным формулам, полученным с использованием геометрических свойств ортофотоплана. Технический результат изобретения заключается в повышении оперативности, надежности и точности определения координат источника кольцевых волн на водной поверхности при неизвестной заранее ориентации съемочной системы. 3 ил.
Способ определения с космического аппарата координат источника кольцевых волн на водной поверхности, включающий регистрацию кольцевых волн на снимке, отличающийся тем, что регистрируют на снимке одновременно с кольцевыми волнами часть суши, выбирают и идентифицируют на снимке не менее четырех характерных объектов, расположенных на суше и не лежащих на одной прямой, производят ортотрансформирование снимка, фиксируют на ортотрансформированном снимке не менее трех точек, лежащих на изображении кольцевой волны, определяют по ортотрансформированному снимку координаты фиксированных точек и определяют координаты источника кольцевых волн x0, y0 по формуле

где a1=х1-х2; a2=у1-y2;
a 3=х1-x3; a4=у1-у3;
a 5=a1(x1+x2)+a2(y1+y2);
a 6=a3(x1+x3)+a4(у1+y3),
x1, y1; x2, y2; x3, y3 - координаты точек на изображении кольцевой волны, определяющих вершины треугольника максимальной площади.
| US 20140119639 A1, 01.05.2014 | |||
| СПОСОБ ПРОВЕДЕНИЯ СЪЕМКИ ЗЕМНОЙ ПОВЕРХНОСТИ ИЗ КОСМОСА | 2002 |
|
RU2227900C2 |
| Способ предотвращения образования сульфатвосстанавливающих бактерий в пластовых водах | 1985 |
|
SU1279970A1 |
| US 20140341423 A1, 20.11.2014 | |||
| US 4656867 A1, 14.04.1987 | |||
| US 8284072 B1, 09.10.2012. | |||

