Настоящее изобретение относится к электрическому соединителю.
Электрические соединители находят широкое применение в разных назначениях, например, для соединения двух электронных устройств. Для некоторых случаев применения электрические соединители имеют герметичные покрытия по поверхности раздела в местах нахождения электрических контактов, которые призваны обеспечить герметичность между частями штепсельного соединения. Эти герметичные покрытия по поверхности раздела обладают эффективностью только при их достаточном сжатии. Иногда для соединения требуется значительное усилие их сжатия, что делает необходимым применение специальных инструментов.
Кроме того, диапазоны производственного допуска могут вызвать наличие люфта между частями штепсельного соединения, что может нарушить запирание и/или соединение частей штепсельного соединения, а также герметичность по поверхности раздела.
Целью настоящего изобретения является создание электрического соединителя, в котором устраняются, по меньшей мере, некоторые из указанных недостатков, который позволяет несмотря на диапазоны допуска гарантировать герметичность соединения по поверхности раздела, само соединение и запирание и для которого не требуется инструмента для выполнения операций по соединению и разъединению.
Поэтому объектом изобретения является электрический соединитель, содержащий первую часть штепсельного соединения или штепсельное гнездо и вторую часть штепсельного соединения или штепсель, которые могут быть электрически соединены своим относительным смещением по оси соединения, отличающийся тем, что первая часть штепсельного соединения содержит первые направляющие средства, которые могут взаимодействовать со вторыми направляющими средствами соединительного элемента второй части штепсельного соединения для обеспечения смещения соединительного элемента относительно первой части штепсельного соединения на участке между свободным положением, в котором соединительный элемент остается свободным по отношению к первой части штепсельного соединения, и положением запирания, в котором соединительный элемент жестко связан с первой частью штепсельного соединения по оси соединения, причем вторая часть штепсельного соединения содержит корпус с третьими направляющими средствами, которые могут взаимодействовать с соединительным элементом для перемещения соединительного элемента относительно корпуса по оси соединения, при этом вторая часть штепсельного соединения содержит эластичные средства, расположенные между корпусом и соединительным элементом и способные, при нахождении соединительного элемента в положении запирания, вызывать движение корпуса относительно соединительного элемента, при котором корпус смещается в направлении к первой части штепсельного соединения по оси соединения.
Предпочтительно, чтобы корпус имел в целом форму прямоугольного параллелепипеда, причем соединительный элемент выполнен по существу U-образной формы, причем центральный участок соединительного элемента расположен поперечно вдоль верхней стенки корпуса, при этом оба боковых участка соединительного элемента расположены поперечно вдоль двух боковых, противоположных стенок корпуса.
Согласно варианту выполнения изобретения первая часть штепсельного соединения имеет в целом форму прямоугольного параллелепипеда, при этом вторые направляющие средства содержат на каждом боковом участке соединительного элемента утолщение, выступающее в направлении ко второму боковому участку, причем первые направляющие средства содержат на обеих противоположных стенках первой части штепсельного соединения выемку, образующую на одном из своих краев направляющую наклонную плоскость, при этом каждое утолщение может входить в соответствующую выемку и перемещаться внутри нее по направляющей наклонной плоскости.
Предпочтительно, чтобы выемка образовывала вместе с концом соответствующей направляющей наклонной плоскости гнездо, в котором утолщение удерживается в положении запирания.
Предпочтительно, чтобы вторые направляющие средства содержали на каждом боковом участке соединительного элемента два утолщения, выступающие в направлении к другому боковому участку, причем оба утолщения расположены по прямой линии по оси, существенно перпендикулярной к оси соединения, причем первые направляющие средства содержат на обеих боковых противоположных стенках первой части штепсельного соединения две выемки, каждая из которых образует на одном из своих краев направляющую наклонную плоскость, причем каждое утолщение может входить в соответствующую выемку и перемещаться в ней по направляющей наклонной плоскости.
Согласно варианту выполнения изобретения третьи направляющие средства содержат направляющую наклонную плоскость, выступающую над верхней стенкой корпуса, при этом край центрального участка опирается на эту направляющую наклонную плоскость, а центральный участок выполнен с возможностью перемещения по направляющей наклонной плоскости.
Предпочтительно, чтобы направляющая наклонная плоскость обеспечивала движение соединительного элемента относительно корпуса по оси соединения для запирания соединительного элемента в первой части штепсельного соединения до окончания операции по соединению первой части штепсельного соединения с ее второй частью, что позволяет уменьшить усилие, необходимое для соединения.
Предпочтительно, чтобы третьи направляющие средства содержали на каждой боковой стенке направляющую наклонную плоскость, причем угол каждого бокового участка опирается на соответствующую направляющую наклонную плоскость и каждый боковой участок может перемещаться по соответствующей направляющей наклонной плоскости.
Согласно варианту выполнения изобретения каждый боковой участок соединительного элемента содержит направляющую канавку, расположенную по оси по существу перпендикулярно оси соединения, при этом каждая боковая стенка корпуса содержит закраину, которая может заходить в соответствующую направляющую канавку с зазором по оси соединения, причем пластина, образующая пружину, находится в каждой направляющей канавке и приводит в движение соединительный элемент относительно корпуса по оси соединения.
Предпочтительно, чтобы после запирания соединительного элемента в первой части штепсельного соединения пластины, образующие пружины, обеспечивали относительное движение между корпусом и первой частью штепсельного соединения для устранения люфта по оси соединения.
Согласно варианту выполнения изобретения каждый боковой участок содержит гнездо для размещения конца геликоидальной пружины, при этом другой конец геликоидальной пружины находится в гнезде соответствующей боковой стенки, причем пружина расположена по оси по существу перпендикулярно оси соединения для обеспечения относительного движения по оси, перпендикулярной оси соединения соединительного элемента и корпуса, таким образом, чтобы утолщение сместилось в гнездо и удерживалось в нем для обеспечения запирания.
Другие цели, детали, признаки и преимущества изобретения поясняются в приводимом ниже подробном описании варианта выполнения, приведенного исключительно в порядке иллюстрации и не являющегося ограничительным, со ссылками на приложенные схематические чертежи, на которых изображено:
фиг.1 - электрический соединитель, содержащий штепсель и штепсельное гнездо, согласно варианту выполнения изобретения, схематический упрощенный вид в перспективе с разрезом;
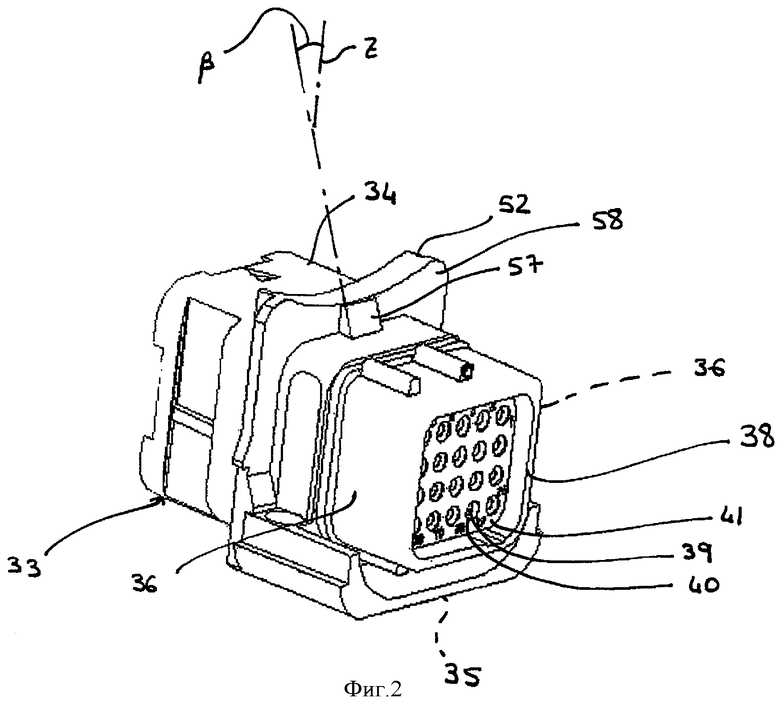
фиг.2 - схематический упрощенный вид в перспективе на корпус и электрические контакты штепселя на фиг.1;
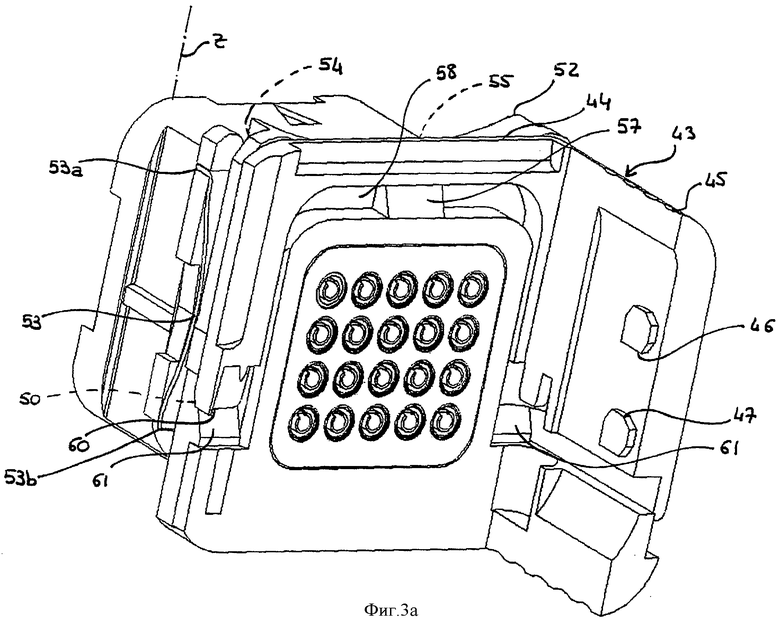
фиг.3а - частичный схематический упрощенный вид в перспективе на боковой участок обоймы и направляющие наклонные плоскости штепселя на фиг.1;
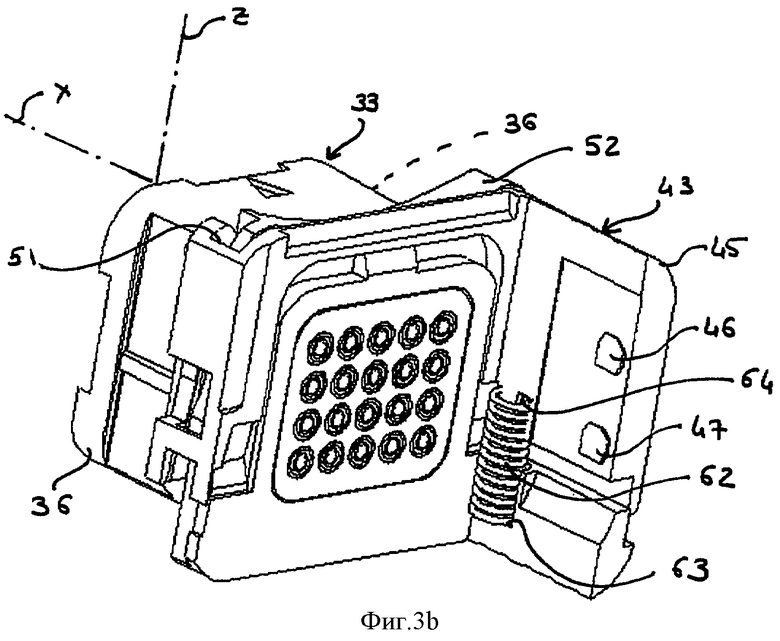
фиг.3b - направляющая канавка обоймы, вид, аналогичный виду на фиг.3а;
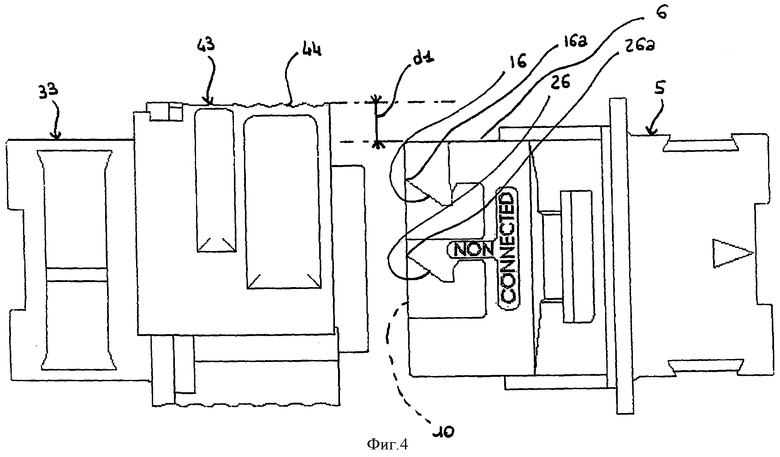
фиг.4 - схематический упрощенный боковой вид на штепсель и штепсельное гнездо на фиг.1 в положении разъединения;
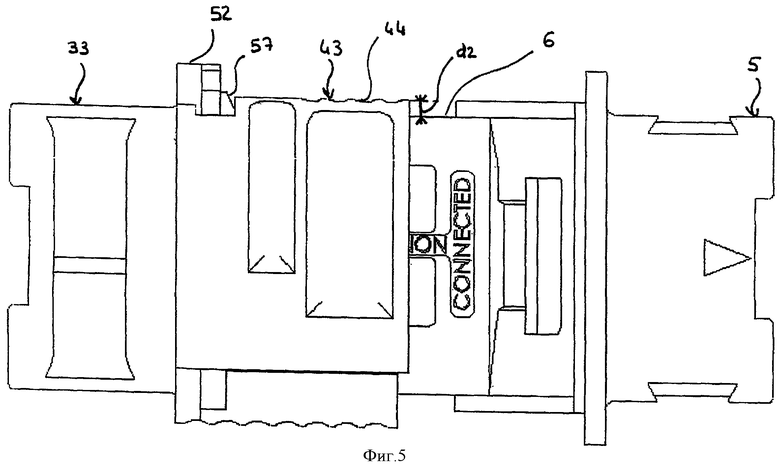
фиг.5 - промежуточное положение при операции соединения штепселя и его гнезда, вид, аналогичный виду на фиг.4;
фиг.6 - штепсель и штепсельное гнездо в положении соединения, вид, аналогичный виду на фиг.4.
Как показано на фиг.1, соединитель 1 содержит первую часть штепсельного соединения, называемую штепсельным гнездом 2, и вторую часть штепсельного соединения, называемую штепселем 3. Штепсельное гнездо 2 соединено, например, с электронным устройством (не показано), интегрированным в конструкцию самолета (не показан). Штепсельное гнездо 2 выполнено неподвижным относительно конструкции. Штепсель 3 соединен, например, с оснасткой, обеспечивающей связь двух электронных устройства (не показаны). Штепсельное гнездо 2 и штепсель 3 соединяются друг с другом движением штепселя 3 по отношению к штепсельному гнезду 2 в направлении Х соединения.
Штепсельное гнездо 2 содержит корпус 5, например, из литой пластмассы или металла. Корпус 5 имеет общую форму в виде прямоугольного параллелепипеда и содержит верхнюю стенку 6, нижнюю стенку 7 и две боковых стенки 8. Передняя поверхность 10 корпуса 5 выполнена открытой для доступа к электрическим контактам 11, расположенным в четыре ряда в изображенном примере осуществления, при этом количество таких рядов является не ограниченным. Электрические контакты 11 выступают над герметичным покрытием по поверхности раздела (на фиг.1 не показано), расположенным в поперечной плоскости корпуса 5. Герметичное покрытие по поверхности раздела выполнено из герметичного и деформируемого материала, например силикона. Каждый электрический контакт 11 окружен утолщением (на фиг.1 не показан) герметичного покрытия по поверхности раздела в основном в виде труки, выступающей в направлении к передней поверхности 10. Известным образом электрические контакты 11 соединены своей задней частью с кабелем (не показан) или электрической схемой.
Каждая боковая стенка 8 корпуса 5 содержит выемку 13, боковой край 14 которой лежит в плоскости передней поверхности 10, а верхний край образует направляющую наклонную плоскость 16. Конец 16а направляющей наклонной плоскости 16 лежит в плоскости передней поверхности 10. Направляющая наклонная плоскость 16 наклонена вниз, в направлении, противоположном передней поверхности 10, под углом α по отношению к оси X. Например, угол α составляет по существу 45°. Противоположный конец 16b направляющей наклонной плоскости 16 входит в гнездо 20, предназначенное для размещения зажима обоймы, подробно описываемого ниже.
Каждая боковая стенка 8 корпуса 5 содержит вторую выемку 23, аналогичную выемке 13. Боковой край 24 выемки 23, расположенный в плоскости передней поверхности 10, смещен по оси Z, перпендикулярной оси Х и параллельной плоскости передней поверхности 10, по отношению к боковому краю 14. Верхний край 25 выемки 23 образует направляющую наклонную плоскость 26, схожую с направляющей наклонной плоскостью 16. Направляющая наклонная плоскость 26 заходит в гнездо 30, предназначенное для размещения второго зажима обоймы.
Как показано на фиг.1, 2, 3а и 3b, штепсель 3 содержит корпус 33, например, из литой пластмассы или металла. Корпус 33 имеет общую форму прямоугольного параллелепипеда, сечение которого приведено в соответствии с сечением корпуса 5 штепсельного гнезда таким образом, что корпус 33 штепселя 3 может входить в корпус 5 штепсельного гнезда 2. Корпус 33 содержит верхнюю стенку 34, нижнюю стенку 35 и две боковых стенки 36.
Передняя поверхность 38 (фиг.2) корпуса 33 выполнена открытой для доступа к электрическим контактам 39, взаимодействующим с электрическими контактами 11. Электрические контакты 39 расположены в выемках 40, имеющих в основном коническую форму и выполненных в покрытии 41, расположенном в поперечной плоскости корпуса 33. Покрытие 41 состоит, например, из пластмассы. Известным образом электрические контакты 30 соединены в их задней части с кабелем или электрической схемой (не показана).
Штепсель 3 содержит соединительный элемент, называемый обоймой 43 (фиг.1). Обойма 43 имеет в целом U-образную форму. Центральный участок 44 U-образной формы расположен по существу поперечно вдоль верхней стенки 34 корпуса 33. Боковые участки 45 U-образной формы расположены поперечно вдоль боковых стенок 36 корпуса 33.
Каждый участок 45 содержит два зажима 46, 47 (фиг.3а, 3b), которые выступают в направлении к другому участку 45 и могут входить в гнездо 20, 30 соответственной боковой стенки 8. Для большей наглядности показан только один участок 45 на фиг.3а и 3b.
Каждый участок 45 содержит направляющую 51, расположенную по существу по оси Z. Закраина 52 корпуса 33, выступающая радиально в поперечной плоскости корпуса 33, заходит в направляющую 51 с обеспечением люфта таким образом, что соединение направляющей 51 с закраиной 52 обеспечивает движение по оси Х обоймы 43 по отношению к корпусу 33. Пластина 53 в основном параболической формы, образующая пружину и выполненная, например, из металла, расположена в направляющей 51. Конец 53а пластины 53 закреплен на стенке направляющей 51. Конец 53b пластины 53 расположен практически параллельно стенке направляющей 51 и может скользить по отношению к стенке направляющей. Центральная часть пластины 53 опирается на заднюю поверхность 54 закраины 52. Форма пластин 53 обеспечивает подъем обоймы 43, которая более подробно описана ниже.
Задний край 55 центрального участка 44 обоймы 43 опирается на направляющую наклонную плоскость 57 передней поверхности 58 закраины 52 и может смещаться по направляющей наклонной плоскости 57 при движении обоймы 43 относительно корпуса 33. Направляющая наклонная плоскость 57 наклонена под углом β (фиг.2) по отношению к оси Z таким образом, что в том случае, когда обойма 43 совершает движение по оси Z в направлении, противоположном корпусу 33, обойма 43 движется одновременно по оси Х в направлении, противоположном передней поверхности 10 корпуса 33.
Нижний угол 60 заднего края 50 каждого участка 45 опирается на направляющую наклонную плоскость 61 на передней поверхности 58 закраины 52 и может смещаться по направляющей наклонной плоскости 61 при движении обоймы 43 относительно корпуса 33. Направляющая наклонная плоскость 61 наклонена по отношению к оси Z под углом β.
Конец геликоидальной пружины 62 располагается в гнезде 63 каждой боковой стенки 36 корпуса 33, при этом противоположный конец пружины 62 находится в гнезде 64 соответствующего участка 45 обоймы 43. Пружина 63 стремится отжать обойму 43 от корпуса 33 по оси Z.
Ниже описывается операция по соединению штепсельного гнезда 2 со штепселем 3 согласно варианту выполнения.
В свободном положении, т.е. в том случае, когда зажимы 46, 47 не входят в направляющие наклонные плоскости 16, 26, возвратные пружины 62 толкают обойму 43 по оси Z в направлении, противоположном корпусу 33, а пластины 53 толкают обойму 43 по оси Х в направлении, противоположном передней поверхности 38 корпуса 33. Обойма 43 занимает верхнее положение, т.е. она опирается на верхние участки направляющих наклонных плоскостей 57, 61.
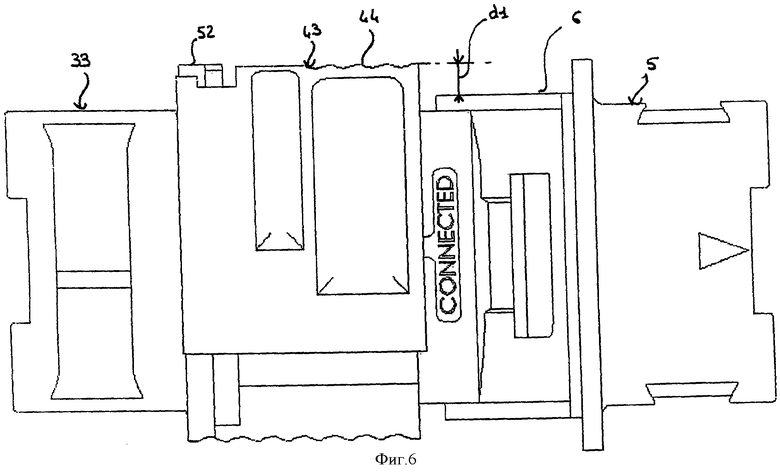
В том случае, когда из этого положения пользователь располагает переднюю поверхность 38 корпуса 33 штепселя 3 под прямым углом к передней поверхности 10 корпуса 5 штепсельного гнезда 2 так, чтобы зажимы 46, 47 располагались на уровне концов 16а, 26а направляющих наклонных плоскостей 16, 26, то расстояние d1 (фиг.4) между верхней стенкой 6 корпуса 5 штепсельного гнезда 2 и участком 44 обоймы 43 является максимальным и это соответствует верхнему положению обоймы 43.
В том случае, когда из указанного положения пользователь перемещает штепсель 3 в направлении к штепсельному гнезду 2 по оси X, то зажимы 46, 47 заходят на направляющие наклонные плоскости 16, 26 и перемещаются по ним, сжимая пружины 62. Расстояние между верхней стенкой 6 корпуса 5 штепсельного гнезда и участком 44 обоймы 43 уменьшается. Следует отметить, что направляющие наклонные плоскости 16, 26 обеспечивают расположение по прямой линии и устойчивость штепселя 3 и его гнезда 2 во время их соединения.
Одновременно с этим обойма 43 перемещается по наклонным плоскостям 57, 61. Другими словами, обойма 43 совершает по отношению к корпусу 33 движения с двумя степенями свободы, т.е. движение по оси Х и движение по оси Z. Это приводит к увеличению свеса обоймы 43, т.е. смещение корпуса 33 по отношению к корпусу 5 меньше смещения обоймы 43 по отношению к корпусу 5. Таким образом ограничивается глубина проникания утолщений герметичного покрытия в выемки 40 покрытия 41, что уменьшает усилие, которое должен приложить пользователь. Другими словами, положение запирания достигается без сверхсжатия герметичного покрытия. Это позволяет уменьшить усилие, необходимое для соединения. Пластины 53 сжимаются и, следовательно, приобретают потенциальную энергию для соединительного узла системы, необходимую для последующего сжатия герметичного покрытия по поверхности раздела штепсельного гнезда 2 и покрытия 41, о котором подробно речь пойдет ниже.
В том случае, когда из указанного положения пользователь продолжает перемещать штепсель 3 в направлении к штепсельному гнезду 2 по оси X, зажимы 46, 47 смещаются до концов 16b, 26b наклонных плоскостей 16, 26. Это положение является критическим положением при запирании, в котором пружины 62 и пластины 53 максимально нагружены. Концы 16b, 26b представляют собой твердые точки. Расстояние d2 между центральным участком 44 и верхней стенкой 6 корпуса 5 является минимальным. Обойма 43 находится в нижнем положении (фиг.5).
После того, как зажимы 46, 47 минуют концы 16b, 26b, образующие твердые точки, пружины 62 ослабляются, вызывая движение обоймы 43 относительно штепсельного гнезда 2 по оси Z. Зажимы 46, 47 заходят в гнезда 20, 30. Обойма 43 занимает положение запирания, в котором она жестко связана с корпусом штепсельного гнезда 2. Обойма 43 располагается в верхнем положении (фиг.6).
В этом положении пластины 52 ослабляются, в результате чего возникает сила, направленная по оси Х и вызывающая смещение корпуса 33 относительно обоймы 43 по оси X. Корпус 33 смещается по отношению к корпусу 5 по оси Х в направлении к нему.
Во время соединения утолщения герметичного покрытия по поверхности раздела штепсельного гнезда 2 заходят с деформацией в конические выемки 40. Потенциальная энергия, накопленная пластинами 53, обеспечивает соединение и минимальное сжатие герметичного покрытия по поверхности раздела. Возвратное усилие пластин 53 уравновешивается с усилиями заведения электрических контактов 11, 39 и усилием сжатия герметичного покрытия по поверхности раздела. Возврат пластин 53 в равновесное состояние позволяет произвести соединение штепсельного гнезда 2 со штепселем 3 и обеспечивает сжатие герметичного покрытия по поверхности раздела.
Следовательно, усилие сжатия по поверхности раздела контролируется во время запирания. Это гарантирует минимальное сжатие герметичного покрытия по поверхности раздела. Минимальное сжатие - это сжатие, которое необходимо для обеспечения герметичности по поверхности раздела. Сжатие должно обеспечивать достаточную глубину проникания утолщений герметичного покрытия по поверхности раздела штепсельного гнезда 2 в конические выемки 40. Минимальная глубина проникания составляет, например, порядка одной десятой миллиметра.
Пластины 53 позволяют исключить люфт, который может присутствовать между разными деталями по оси X. Операция соединения гарантирует также герметичность по поверхности раздела, электрическое подключение и запирание с осуществлением контроля за усилиями с учетом интервалов допусков, в частности, производственных, которые могут достигать, например, порядка одного миллиметра. Такой механизм обеспечивает минимальное сжатие покрытия по поверхности раздела несмотря на люфт, который может присутствовать между разными деталями.
Далее приводится описание операции по разъединению штепсельного гнезда 2 и штепселя 3 согласно варианту выполнения.
В том случае, когда пользователь в положении запирания надавливает на обойму 43 для перевода ее в нижнее положение, зажимы 46, 47 выходят из гнезд 20, 30. В этом положении штепсель 3 и штепсельное гнездо 2 более не связаны жестко, и при движении по оси Х происходит разъединение. В том случае, когда пользователь ослабляет обойму 43, последняя возвращается в свободное положение.
Операции по соединению и разъединению проводятся вручную и не требуют применения инструмента.
Также возможны другие варианты.
Соединитель может быть электрическим соединителем любого типа и применяться в разных назначениях. В частности, форма корпуса штепсельного гнезда может быть произвольной, при этом форма корпуса штепселя согласуется для обеспечения соединения штепсельного гнезда и штепселя. Размеры корпусов могут быть любыми. Электрические контакты штепсельного гнезда могут быть охватываемыми или охватывающими, причем электрические контакты штепселя приведены в соответствии для обеспечения соединения штепсельного гнезда и штепселя.
Операция по соединению может проводиться нажатием на обойму 43. В этом случае пользователь устанавливает переднюю поверхность 38 корпуса 33 под прямым углом к передней поверхности 10 корпуса 5 и нажимает на обойму 43. Когда зажимы 46, 47 примут положение под прямым углом к гнездам 20, 30, пользователь отпускает обойму 43 и зажимы заходят в гнезда 20, 30. Следует отметить, что при таком варианте операции соединения зажимы 46, 47 не обязательно переместятся по наклонным плоскостям 16, 26.
Наклон плоскостей 16, 26 может быть разным. Например, наклонные плоскости 16, 26 могут быть ориентированы вверх.
Штепсельное гнездо 2 не обязательно может быть неподвижным по отношению к конструкции и операции, связанные с соединением и разъединением, могут выполняться в зависимости от отдельного случая путем перемещения одной из частей штепсельного соединения, т.е. штепселя или штепсельного гнезда, относительно другой части штепсельного соединения, т.е. соответственно штепсельного гнезда или штепселя, или же одновременным перемещением обеих частей штепсельного соединения.
Форма корпусов, количество электрических контактов и их расположение могут быть любыми.
Визуальная метка (показана на фиг.4-6) позволяет пользователю легко определять нахождение обоймы 43 в положении запирания. Визуальная метка может располагаться на корпусе 5 и представлять собой слово НЕТ, расположенное по оси Z, и слово СОЕДИНЕНО, расположенное по оси X. Когда обойма 43 перемещается по оси Х в направлении к корпусу 5, она постепенно закрывает слово НЕТ. Когда обойма находится в положении запирания или, по меньшей мере, под прямым углом к гнездам 20, 30, слово НЕТ оказывается полностью закрытым, а слово СОЕДИНЕНО остается видимым. Визуальная метка позволяет пользователю, не являющемуся специалистом, в частности, упростить операцию соединения. Визуальная метка может помочь пользователю определить момент, когда он должен ослабить обойму, если соединение производится путем нажатия на обойму.
Хотя изобретение описано в связи с отдельным вариантом своего выполнения, однако совершенно очевидно, что оно им не ограничивается и включает в себя все технические эквиваленты описанных средств, а также их сочетания, если они не выходят за рамки изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ АДАПТЕР | 2002 |
|
RU2288492C2 |
| СОЕДИНИТЕЛЬНАЯ КОРОБКА ДЛЯ ЭКРАНИРОВАННОГО КАБЕЛЯ, В ЧАСТНОСТИ ДЛЯ КАБЕЛЯ ПЕРЕДАЧИ ДАННЫХ | 1993 |
|
RU2089985C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ СОЕДИНИТЕЛЬ (ВАРИАНТЫ) | 1994 |
|
RU2128852C1 |
| СОЕДИНИТЕЛЬНАЯ СИСТЕМА ДЛЯ ПРИСОЕДИНЕНИЯ ПИТАЮЩИХ ЛИНИЙ | 2007 |
|
RU2418690C2 |
| СВЕТОДИОДНОЕ ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО | 2017 |
|
RU2657864C1 |
| Точка электрического соединения | 2019 |
|
RU2801389C2 |
| ЭЛЕКТРИЧЕСКИЙ РАЗЪЕМ | 2008 |
|
RU2457590C2 |
| РАЗЪЕМНОЕ СОЕДИНЕНИЕ ДЛЯ ПЕРЕДАЧИ ЭЛЕКТРОЭНЕРГИИ | 2011 |
|
RU2557072C2 |
| ШТЕПСЕЛЬНАЯ РОЗЕТКА | 2020 |
|
RU2817299C2 |
| СОЕДИНИТЕЛЬНАЯ КЛЕММА | 2013 |
|
RU2638152C2 |
Электрический соединитель содержит первую часть штепсельного соединения или штепсельное гнездо (2) и вторую часть штепсельного соединения или штепсель (3), предназначенные для электрического соединения относительным перемещением частей (2, 3) штепсельного соединения по оси соединения (X). Первая часть (2) штепсельного соединения содержит первые направляющие средства (16, 26), взаимодействующие со вторыми направляющими средствами соединительного элемента (43) второй части (3) штепсельного соединения для обеспечения перемещения соединительного элемента относительно первой части штепсельного соединения. Вторая часть (3) штепсельного соединения содержит корпус (33) с третьими направляющими средствами, взаимодействующими с соединительным элементом (43) для перемещения соединительного элемента относительно корпуса по оси соединения (X), и эластичными средствами, вызывающими движение соединительного элемента относительно корпуса. Технический результат - обеспечение возможности, несмотря на диапазоны допуска, гарантировать герметичность соединения по поверхности раздела соединителя, выполнение операций по соединению и разъединению которого не требует инструмента. 10 з.п. ф-лы, 7 ил.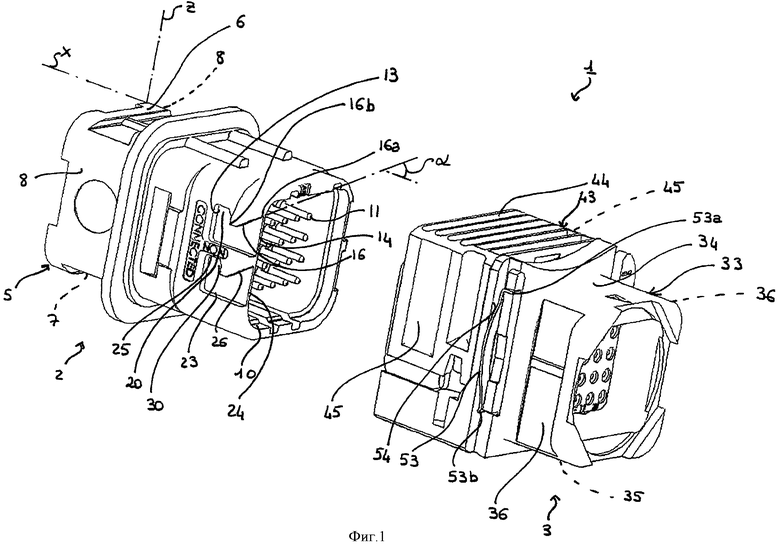
1. Электрический соединитель, содержащий первую часть штепсельного соединения или штепсельное гнездо (2) и вторую часть штепсельного соединения или штепсель (3), предназначенные для электрического соединения относительным перемещением частей (2, 3) штепсельного соединения по оси соединения (X), отличающийся тем, что первая часть (2) штепсельного соединения содержит первые направляющие средства (16, 26), взаимодействующие со вторыми направляющими средствами (46, 47) соединительного элемента (43) второй части (3) штепсельного соединения для обеспечения перемещения соединительного элемента (43) относительно первой части (2) штепсельного соединения между свободной позицией, в которой соединительный элемент (43) остается свободным относительно первой части штепсельного соединения, и позицией запирания, в которой соединительный элемент (43) жестко связан с первой частью (2) штепсельного соединения по оси соединения (X), при этом вторая часть (3) штепсельного соединения содержит корпус (33) с третьими направляющими средствами (57, 61), взаимодействующими с соединительным элементом (43) для обеспечения перемещения соединительного элемента (43) относительно корпуса (33) по оси соединения (X), причем вторая часть (3) штепсельного соединения содержит эластичные средства (53) между корпусом (33) и соединительным элементом (43), способные при нахождении соединительного элемента (43) в положении запирания вызывать движение корпуса (33) относительно соединительного элемента (43), при котором корпус перемещается в направлении к первой части (2) штепсельного соединения по оси соединения (X).
2. Соединитель по п.1, отличающийся тем, что корпус (33) имеет в целом вид прямоугольного параллелепипеда, при этом соединительный элемент (43) выполнен в основном U-образного вида, причем центральный участок (44) соединительного элемента (43) расположен поперечно вдоль верхней стенки (34) корпуса (33), а оба боковых участка (45) соединительного элемента (43) расположены поперечно вдоль обеих противоположных боковых стенок (36) корпуса (33).
3. Соединитель по п.2, отличающийся тем, что первая часть (2) штепсельного соединения имеет в целом вид прямоугольного параллелепипеда, при этом вторые направляющие средства содержат на каждом боковом участке (45) соединительного элемента (43) утолщение (46), выступающее в направлении ко второму боковому участку (45), причем первые направляющие средства содержат на обеих противоположных боковых стенках (8) первой части (2) штепсельного соединения выемку (13), образующую на одном из своих краев направляющую наклонную плоскость (16), при этом каждое утолщение (46) может заходить в соответствующую выемку (13) и перемещаться в ней по направляющей наклонной плоскости.
4. Соединитель по п.3, отличающийся тем, что выемка (13) образует вместе с концом (16b) соответствующей направляющей наклонной плоскости (16) гнездо (20), при этом утолщение (46) удерживается в этом гнезде (20) в положении запирания.
5. Соединитель по п.3, отличающийся тем, что вторые направляющие средства содержат на каждом боковом участке (45) соединительного элемента (43) два утолщения (46, 47), выступающие в направлении к другому боковому участку (45), при этом оба утолщения (46, 47) расположены по прямой линии по оси (Z), по существу, перпендикулярно к оси соединения (X), причем первые направляющие средства содержат на обеих противоположных боковых стенках (8) первой части (2) штепсельного соединения две выемки (13, 23), каждая из которых образует на одном из своих краев направляющую наклонную плоскость (16, 26), при этом каждое утолщение (46, 47) может входить в соответствующую выемку (13, 23) и перемещаться в ней по направляющей наклонной плоскости.
6. Соединитель по п.2, отличающийся тем, что третьи направляющие средства содержат направляющую наклонную плоскость (57), выступающую над верхней стенкой (34) корпуса (33), при этом край центрального участка (44) опирается на направляющую наклонную плоскость (57), а центральный участок (44) может перемещаться по направляющей наклонной плоскости (57).
7. Соединитель по п.6, отличающийся тем, что направляющая наклонная плоскость (57) обеспечивает движение соединительного элемента (43) относительно корпуса (33) по оси соединения (X) для запирания соединительного элемента (43) в первой части (2) штепсельного соединения до окончания операции соединения первой части (2) штепсельного соединения со второй частью (3) штепсельного соединения, что уменьшает усилие, необходимое для соединения.
8. Соединитель по п.2, отличающийся тем, что третьи направляющие средства содержат на каждой боковой стенке (36) направляющую наклонную плоскость (61), при этом угол (60) каждой боковой стенки (45) опирается на соответствующую направляющую наклонную плоскость (61) и каждый боковой участок (45) может перемещаться по соответствующей направляющей наклонной плоскости (61).
9. Соединитель по п.2, отличающийся тем, что каждый боковой участок (45) соединительного элемента (43) содержит направляющую канавку (51), расположенную по оси (Z), по существу, перпендикулярно оси соединения (X), при этом каждая боковая стенка (36) корпуса (33) содержит закраину (52), которая может входить в соответствующую направляющую канавку (51) с зазором по оси соединения (X), причем пластина (53) образует пружину, расположенную в каждой направляющей канавке (51) и приводящую в движение соединительный элемент (43) относительно корпуса (33) по оси соединения (X).
10. Соединитель по п.8, отличающийся тем, что после запирания соединительного элемента (43) в первой части (2) штепсельного соединения пластины (53), образующие пружину, обеспечивают относительное движение между корпусом (33) и первой частью (2) штепсельного соединения для исключения зазора по оси соединения (X).
11. Соединитель по п.2, отличающийся тем, что каждый боковой участок (45) содержит гнездо (63) для размещения конца геликоидальной пружины (62), при этом другой конец геликоидальной пружины (62) заведен в гнездо (64) соответствующей боковой стенки (36), причем пружина (62) расположена по оси (Z) в основном перпендикулярно оси соединения (X) для обеспечения относительного движения по оси (Z) в основном перпендикулярно к оси соединения (X) соединительного элемента (43) корпуса (33) таким образом, чтобы происходило смещение и удержание утолщения (46) в гнезде (20) при запирании.
| US 6386898 B1, 14.05.2002 | |||
| ЗАЩЕЛКИВАЮЩИЙСЯ НАДЕЖНЫЙ СОЕДИНИТЕЛЬ ПРИБОРОВ ДЛЯ ОПРЕДЕЛЕНИЯ МЕДИЦИНСКИХ ПАРАМЕТРОВ ПАЦИЕНТОВ И СПОСОБ | 2004 |
|
RU2345457C2 |
| EP 1156557 A, 21.11.2001 | |||
| US 6065991 A, 23.05.2000 | |||
| US 4915648 A, 10.04.1990. | |||

