Изобретение относится к медицине, в частности, к электронным устройствам ввода координат, и может быть использовано для людей с параличами верхних и нижних конечностей, а также для людей, род занятий которых ограничивает использование рук.
Люди с тетраплегией (параличом верхних и нижних конечностей) не могут выполнять никаких действий руками. При высоком поражении спинного мозга полностью нарушается осознанное управление скелетными мышцами. Функционируют лишь группы челюстно-лицевых мышц и языка, так как они иннервируются черепными нервами. Кроме того, при работе с компьютером в некоторых случаях использование рук или затруднительно, или невозможно, или недостаточно, например, когда руки заняты другой работой, находятся в защитных перчатках, когда традиционные средства ввода недоступны или при одновременной подаче нескольких команд. В этих случаях устройство ввода размещают во рту и управляют с помощью языка.
Известны устройства дистанционного управления компьютером для человека с ограниченными физическими возможностями, содержащие координатное приспособление с возможностью размещения последнего в ротовой полости человека, и блок обработки сигналов, электрически связанный с координатным приспособлением (US 5460186 А, 24.10.1995 и WO 03/013402 A1, 20.02.2003).
Известные устройства позволяют дистанционно управлять компьютером путем действия мышц языка на джойстик, однако координатное приспособление в этих конструкциях выполнено без учета особенностей управления языком, а блок обработки сигналов размещают вне ротовой полости. Кроме того, устройства выполнены без учета индивидуальных особенностей ротовой полости пациента и особенностей управления языком. При этом передние зубы не могут участвовать в работе, поскольку зубы удерживают внешнюю конструкцию (блок обработки сигналов), а челюстно-лицевые мышцы постоянно напряжены. Наряду с этим, устройство сложно в изготовлении из-за множества рабочих элементов, связанных друг с другом кинематически.
Известно также устройство для управления внешними средствами, содержащее координатное приспособление и блок обработки сигналов, электрически связанный с координатным приспособлением (RU 2245692 С2, 10.02.2005).
Устройство по патенту RU 2245692, хотя и обеспечивает эффективное управление компьютером с помощью челюстно-лицевых мышц, мышц языка и зубов, технологичнее и более удобно в эксплуатации, чем известные из US 5460186 и WO 03/013402, поскольку выполнено с возможностью размещения его в ротовой полости целиком, однако оно выполнено строго с учетом индивидуальных особенностей строения ротовой полости конкретного человека.
Известно устройство ввода координат для дистанционного управления компьютером для людей с ограниченными физическими возможностями (прототип), содержащее электрически связанные блок питания, задающее координаты и управляющее курсором компьютера координатное приспособление, выполненное с возможностью его размещения в ротовой полости, блок обработки сигналов, передатчик, по меньшей мере две функциональные контактные кнопки для выполнения функций кнопок «мыши» и по меньшей мере одну кнопку переключения рода работ, электрически связывающие координатное приспособление с блоком обработки сигналов (RU 2269325 С1, 10.02.2006).
В устройстве, известном из патента RU 2269325, электронный модуль обработки сигналов, координатное приспособление, функциональные контактные кнопки дистанционного управления компьютером и соединительные провода расположены в едином корпусе, который, в свою очередь, фиксируется на базисе, изготовленном по слепку челюсти конкретного пользователя. Следовательно, для другого пользователя необходимо изготавливать другое устройство, которое будет соответствовать его антропометрическим параметрам. Штучное производство ограничивает круг пользователей и делает устройство дорогостоящим, сложным в эксплуатации и не технологичным. Кроме того, базис и размещенный на нем корпус устройства препятствует контакту языка с чувствительными рецепторами слизистой твердого неба, что затрудняет ориентацию последнего в ротовой полости и делает невозможным точное позиционирование языка на органах управления устройства, что, в свою очередь, приводит к выработке ложных команд. Это ухудшает эксплуатационные характеристики и усложняет технологию для массового производства такого устройства. К недостаткам этого технического решения можно также отнести следующее: не учитываются реакции слизистой оболочки на нахождение в ротовой полости инородного тела (устройства), что вызывает обильное слюноотделение. При механическом раздражении слизистой оболочки неба и языка вырабатывается густая слизь, которая препятствует жесткому сцеплению языка с поверхностью манипулятора, что делает управление языком весьма затруднительным и утомительным для пользователя. Известное устройство нетехнологично, поскольку имеет мелкие металлические детали и трудоемко в сборке, недолговечно и ненадежно, т.к. происходит интенсивный механический износ трущихся деталей. Кроме того, в процессе использования известного устройства на его поверхности образуются микроорганизмы, которые инфицируют ротовую полость - это приводит к воспалительным заболеваниям органов ротовой полости.
Таким образом, основным недостатком прототипа является то, что его конструкция выполнена без учета анатомических и физиологических особенностей строения и функционирования языка и ротовой полости. Кроме того, ограниченность пространства ротовой полости не позволят увеличить размер устройства и тем самым достичь приемлемых эксплуатационных характеристик.
Суть проблемы заключается в том что, для ввода координат (например, для перемещения курсора) устройство, размещаемое во рту, должно быть герметичным, легко управляться при помощи языка и точно реагировать на подаваемые команды. Управлять курсором необходимо точно с заданной скоростью и в точно в заданном направлении. Неточное, некорректное выполнение команд требует повторного их введения, что приводит к утомляемости пользователя и стрессу. Парализованный человек (тетраплегик) не может самостоятельно, без посторонней помощи, заменить некорректно работающее или вышедшее из строя устройство и лишается связи с внешним миром.
Следовательно, актуальной задачей является разработка устройства, которое свободно размещается в ротовой полости и при этом имеет высокие эксплуатационные показатели, т.е. четко и корректно откликается на подаваемые команды, правильно интерпретирует их, при этом легко управляется с помощью языка при наличии слизи в ротовой полости. Важным техническим требованием к устройству ввода координат является широкий диапазон скоростей перемещения курсора и точное позиционирование его на мелких объектах, а именно возможность работы (захват перемещение, редактирование) с объектами, размер которых 1 пиксель. При этом должна присутствовать функция быстрого перемещения курсора (через весь экран монитора -не более чем за 1 секунду).
Точность позиционирования, корректность перемещения курсора зависит от количества концентрических токопроводящих дорожек (чем гуще, плотнее сеть дорожек, тем корректнее точнее позиционирование курсора).
Ширина диапазона скорости перемещения курсора зависит от разницы электрического сопротивления в центральной и периферической частях резистивного диска. В центральной части резистивного диска сопротивление резистивного слоя должно быть высоким (для максимально медленного перемещения курсора). На периферической части резистивного диска сопротивление резистивного слоя должно быть низким (для максимально быстрого перемещения курсора).
Таким образом, технический результат, на который направлено предлагаемое изобретение, заключается в улучшении эксплуатационных характеристик устройства.
Указанный технический результат достигается тем, что в устройстве ввода координат для дистанционного управления компьютером человеком с ограниченными физическими возможностями, содержащем электрически связанные блок питания, задающее координаты и управляющее курсором компьютера координатное приспособление, выполненное с возможностью его размещения в ротовой полости, блок обработки сигналов, передатчик, по меньшей мере, две функциональные контактные кнопки для выполнения функций кнопок «мыши» и, по меньшей мере, одну кнопку переключения рода работ, согласно изобретению, координатное приспособление выполнено в форме полого диска с закругленной по радиусу внешней кромкой, полость которого образована первым и вторым слоями гибкой полимерной пленки, соединенными по внешнему контуру и в центральной части полого диска с образованием центральной перемычки. При этом первый слой имеет форму полусферы, вогнутой внутрь полости диска, а второй - плоскую форму, на внутренней поверхности которого нанесены токопроводящие концентрические дорожки, сгруппированные в четыре взаимно перпендикулярных сектора. При этом токопроводящие концентрические дорожки соседних секторов разделены друг от друга общей токопроводящей дорожкой, а расстояние между токопроводящими концентрическими дорожками уменьшается от центра диска к периферии. На вогнутой внутренней поверхности первого слоя нанесен резистивный слой, выполненный в виде радиальных резистивных отрезков, образующих концентрические кольца, так что каждое кольцо расположено над соответствующими токопроводящими концентрическими дорожками. Ширина концентрических колец и длина резистивных отрезков равна расстоянию между соответствующими токопроводящими концентрическими дорожками. Координатное приспособление снабжено отгибным выступом и шлейфом токопроводящих дорожек, образованными скрепленными по их плоской поверхности первым и вторым слоями полимерной пленки и соединенными с кромкой диска. При этом шлейф токопроводящих дорожек снабжен микроконтроллером и электрическим разъемом на конце для соединения с блоком обработки сигналов, а в отгибном выступе размещены функциональные контактные кнопки и кнопка переключения рода работ, токопроводящие концентрические дорожки и концентрические кольца резистивного слоя. При этом функциональные контактные кнопки, по меньшей мере, одна кнопка переключения рода работ и микроконтроллер через соответствующие токопроводящие дорожки шлейфа и разъем электрически связаны с блоком обработки сигналов.
Кроме того, радиальные резистивные отрезки соседних колец могут быть соединены друг с другом общей резистивной дорожкой.
Предусмотрено, что поверхность токопроводящих концентрических дорожек может быть выполнена зернистой.
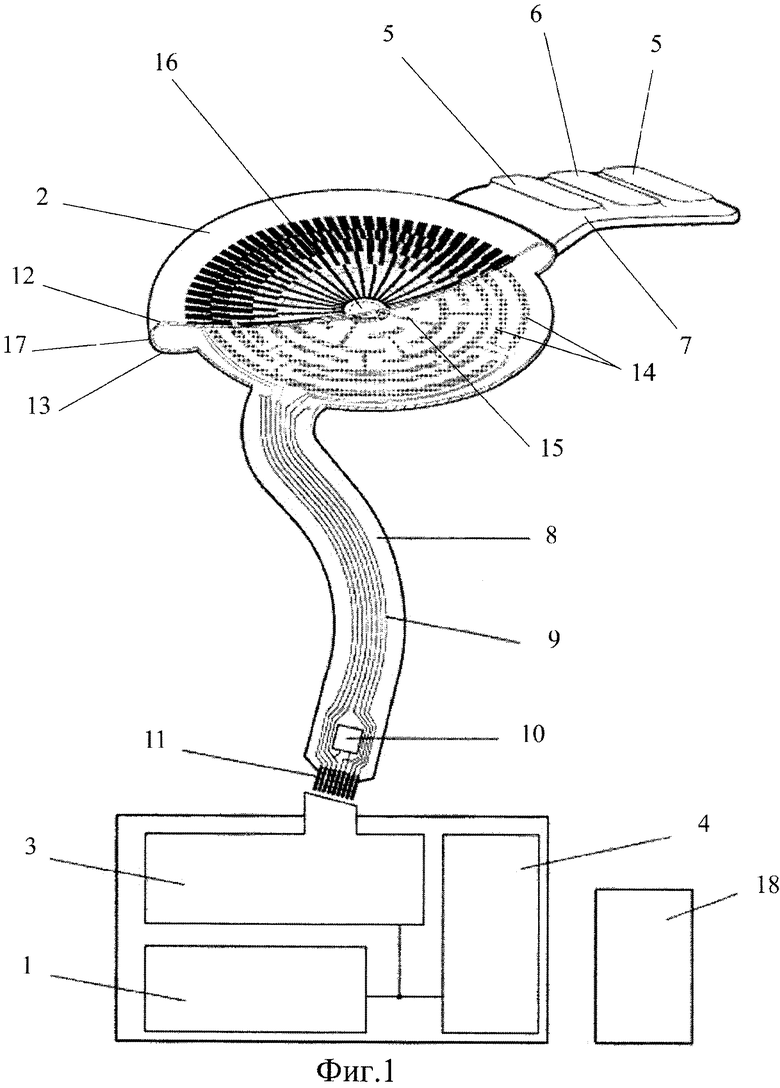
На фиг.1 представлена конструктивная схема устройства ввода координат для дистанционного управления компьютером.
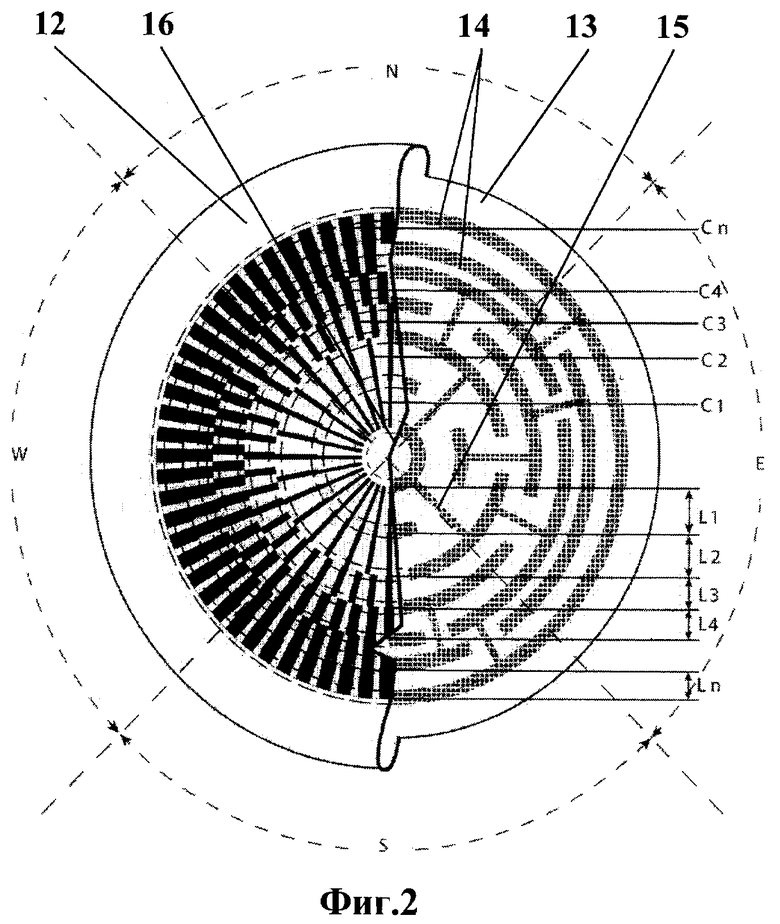
На фиг.2 показано координатное приспособление.
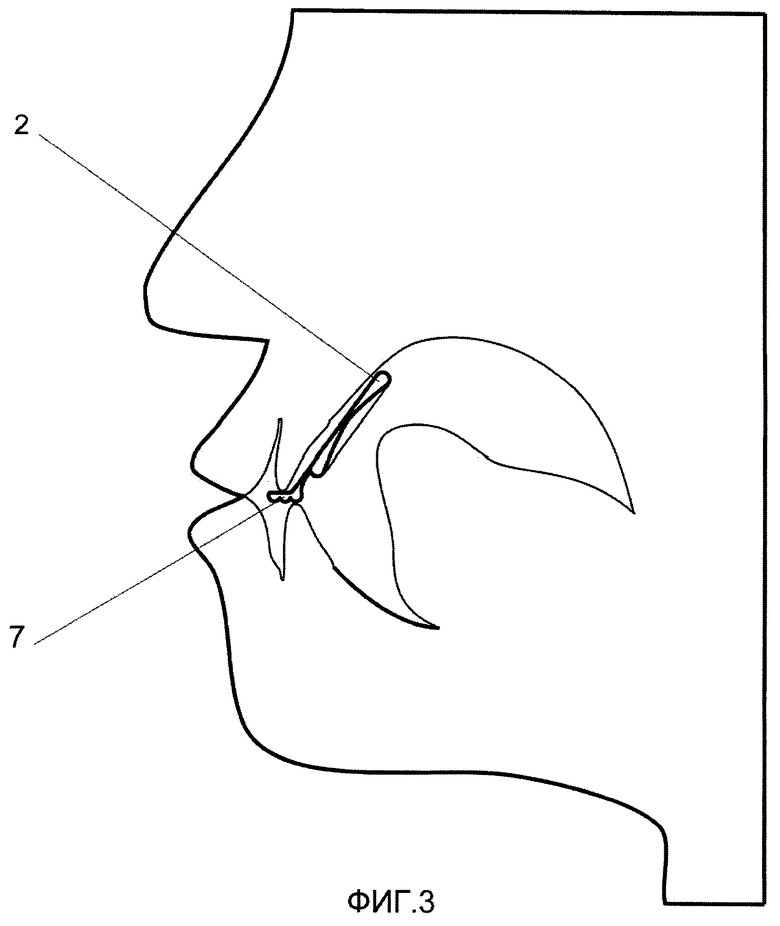
На фиг.3 показано размещение и фиксация в ротовой полости человека координатного приспособления.
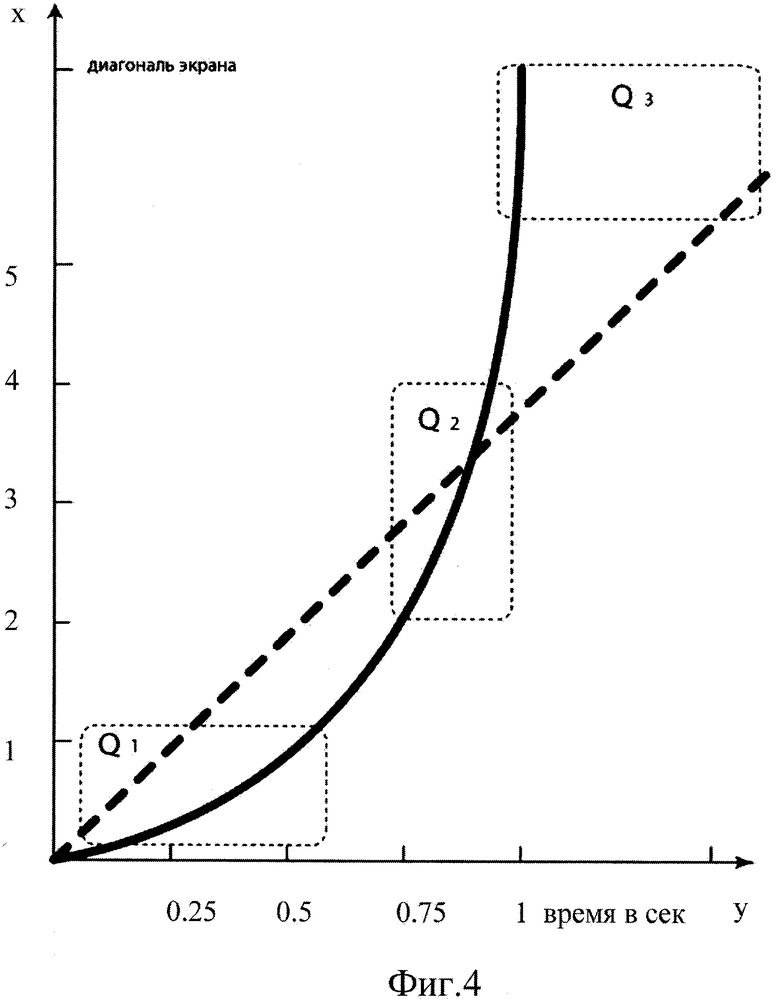
На фиг.4 представлены сравнительные характеристики работы устройств для ввода координат при одинаковой степени воздействия (силе нажатия) на него, где ось Х - расстояние перемещения курсора, ось Y- время перемещения курсора, Q1 - зона работы с мелкими объектами, где требуется медленное и точное перемещение курсора, Q2 - зона работы со средними объектами, где требуется средняя скорость и относительно невысокая точность перемещение курсора, Q3 - зона быстрого перемещения, здесь необходима высокая скорость перемещения курсора в заданном направлении.
Устройство ввода координат для дистанционного управления компьютером человеком с ограниченными физическими возможностями содержит электрически связанные блок питания (1), задающее координаты и управляющее курсором компьютера координатное приспособление (2), выполненное с возможностью его размещения в ротовой полости, блок обработки сигналов (3), передатчик (4), по меньшей мере, две функциональные контактные кнопки (5) для выполнения функций кнопок «мыши» и, по меньшей мере, одну кнопку переключения рода работ (6). Координатное приспособление (2) выполнено в форме полого диска с закругленной по радиусу внешней кромкой (фиг.1). Полость диска образована первым (12) и вторым (13) слоями гибкой полимерной пленки, соединенными по внешнему контуру и в центральной части полого диска с образованием центральной перемычки (16). При этом первый слой имеет форму полусферы, вогнутой внутрь полости диска, а второй - плоскую форму, на внутренней поверхности которого нанесены токопроводящие концентрические дорожки (14), сгруппированные в четыре взаимно перпендикулярных сектора N, E, S, W (фиг.2). При этом токопроводящие концентрические дорожки соседних секторов разделены друг от друга общей токопроводящей дорожкой (15). Расстояние между токопроводящими концентрическими дорожками уменьшается от центра диска к периферии. На вогнутой внутренней поверхности первого слоя нанесен резистивный слой, выполненный в виде радиальных резистивных отрезков L1, L2, L3…Ln, образующих концентрические кольца C1, C2, С3…Cn, так что каждое кольцо С расположено над соответствующими токопроводящими концентрическими дорожками (14). Ширина концентрических колец С и длина радиальных резистивных отрезков L равна расстоянию между соответствующими токопроводящими концентрическими дорожками. Координатное приспособление (2) снабжено отгибным выступом (7) и шлейфом (8) токопроводящих дорожек (9), образованными скрепленными по их плоской поверхности первым и вторым слоями полимерной пленки и соединенными с кромкой диска. При этом шлейф токопроводящих дорожек снабжен микроконтроллером (10) и электрическим разъемом (11) на конце для соединения с блоком обработки сигналов. В отгибном выступе (7) размещены функциональные контактные кнопки (5) и кнопка переключения рода работ (6), токопроводящие концентрические дорожки и концентрические кольца резистивного слоя. При этом функциональные контактные кнопки, по меньшей мере, одна кнопка переключения рода работ и микроконтроллер через соответствующие токопроводящие дорожки шлейфа и разъем электрически связаны с блоком обработки сигналов. Радиальные резистивные отрезки соседних колец могут быть соединены друг с другом общей резистивной дорожкой. Поверхность токопроводящих концентрических дорожек (14) может быть выполнена зернистой. Радиальные резистивные отрезки L1 концентрического кольца C1 выполнены тоньше и длиннее радиальных резистивных отрезков L2 концентрического кольца С2. Соответственно радиальные резистивные отрезки L2 концентрического кольца С2 выполнены тоньше и длиннее резистивных отрезков L3 концентрического кольца С3, а резистивные отрезки концентрического кольца С3 - тоньше и длиннее радиальных резистивных отрезков концентрического кольца Cn. Поскольку от толщины и длины резистивных отрезков зависит их сопротивление, то соответственно сопротивление резистивных отрезков L1 концентрического кольца С1 больше сопротивления резистивных отрезков концентрического кольца С2. Соответственно сопротивление резистивных отрезков концентрического кольца С2 больше сопротивления резистивных отрезков концентрического кольца С3, а сопротивление резистивных отрезков концентрического кольца С3 больше сопротивления резистивных отрезков концентрического кольца Cn (фиг.2).
Устройство работает следующим образом:
Устройство размещают в ротовой полости вторым слоем (13) полого диска к твердому небу (фиг.3). В исходном положении полусфера полого диска удерживается центральной перемычкой (16) в центральном положении (фиг.1 и 2), при котором токопроводящие концентрические дорожки (14) и общая токопроводящая дорожка (15) не замыкаются радиальными резистивными отрезками L ни в одном из секторов N, E, S, W (фиг.1). В этом случае электрический сигнал не поступает и курсор не перемещается.
Пользователь в зависимости от выбранного направления перемещения курсора кончиком языка прижимает край полусферы от центра вверх, вниз, влево, вправо или по сложной траектории. При этом резистивные отрезки L замыкают токопроводящие концентрические дорожки (14) с общей токопроводящей дорожкой (15) либо в верхнем секторе N, либо нижнем секторе S, либо левом О, либо правом W, или в комбинации смежных секторов, например секторы N-W, N-E, S-E, S-W. Курсор перемещается в зависимости от того, в каком из секторов замыкают токопроводящие концентрические дорожки (14) с общей токопроводящей дорожкой (15). Вместе с тем, вогнутая конструкция полусферы не позволяет выполнять некорректные действия, как-то одновременно замыкать концентрические токопроводящие дорожки и общую токопроводящую дорожку противоположных секторов (например, N-S, W-E).
Также пользователь может выбирать скорость перемещения курсора. Для этого он (пользователь) увеличивает или уменьшает степень нажатия языком на край полусферы.
Для медленного перемещения курсора выполняют легкое нажатие языком на край полусферы. При этом полусфера наклоняется в сторону нажатия и радиальный резистивный отрезок L1 концентрического кольца С1 замыкает ближайшую к центру токопроводящую концентрическую дорожку одного из секторов N, E, S, W (фиг.2) или ближайшие к центру токопроводящие концентрические дорожки (14) смежных секторов N-W, N-E, S-E, S-W с общей токопроводящей дорожкой (15). Скорость перемещения курсора при этом зависит от сопротивления радиальных резистивных дорожек L.
Для медленного перемещения и точного позиционирования курсора радиальные резистивные отрезки L1 концентрического кольца С1 выполнены более тонкими и более длинными (соответственно имеют более высокое сопротивление, чем радиальные резистивные отрезки L2, L3… концентрических колец С2, С3…) (фиг.2).
Кроме того, зернистая поверхность токопроводящих концентрических дорожек уменьшает площадь контакта с радиальным резистивными отрезками, что также замедляет скорость перемещения курсора. Данное конструктивное решение позволяет при использовании одного резистивного материала достичь различного сопротивления на разных уровнях управления, что, в свою очередь, позволяет использовать различные скоростные режимы перемещения курсора - от очень медленного 1 пиксель в секунду до очень быстрого (перемещение курсора через весь экран монитора не более чем за 0.5 секунды). Устройство корректно работает при нажатии языком на край полусферы с усилием от 0.5 г/см2 до 15 г/см2. При усилии менее 0.5 г/см2 возможны случайные нажатия, а при усилии более 15 г/см2 у пользователя возникает утомляемость.
Для увеличения скорости перемещения курсора усиливают нажатие языком на край полусферы. При этом наклон полусферы в сторону нажатия увеличивается и происходит замыкание радиальными резистивными отрезками L1 и L2 соответственно концентрических колец С1 и С2 концентрических токопроводящих дорожек (14) с общей токопроводящей дорожкой (15), что дает возможность подбора скорости перемещения курсора в широком диапазоне, при этом не теряя в точности позиционирования. Для моментального перемещения курсора (например, из одной части экрана в другую) резко и до упора производят нажатие языком на край полусферы в предполагаемом направлении. При этом радиальные резистивные отрезки L полусферы замыкают все токопроводящие концентрические дорожки одного из секторов N, E, S, W (фиг.2) или все токопроводящие концентрические дорожки смежных секторов N-W, N-E, S-E, S-W с общей токопроводящей дорожкой (15). При этом сопротивление в цепи становится минимальным, соответственно курсор моментально перемещается в выбранном направлении.
Как видно из графика (фиг.4), кривая (сплошная) предлагаемого устройства во всех зонах работы имеет (большую область) больший рабочий диапазон как во времени, так и в расстоянии.
В электрическую цепь устройства включен микроконтроллер (10), который анализирует корректность проходящих в цепи сигналов, а также контролирует длительность эксплуатации устройства. При достижении определенного времени эксплуатации микроконтроллер посылает на компьютер предупреждение о необходимости замены устройства. Кроме того, микроконтроллер осуществляет контроль зарядки элемента питания устройства и предупреждение о необходимости своевременной подзарядки его или замены.
При прохождении через электрическую цепь некорректных сигналов, например, при замыкании противоположных секторов N-S W-E, противоположных смежных секторов, а также при отсутствии перемещения курсора в случае замыкания токопроводящей концентрической дорожки (14) одного из секторов N, E, S, W с общей токопроводящей дорожкой (15), микроконтроллер (10) информирует пользователя о поломке устройства и осуществляет активизацию программы компьютера по автодозвону в предустановленную службу экстренной помощи.
При необходимости использовать левую или правую кнопки условной мыши передними зубами верхней и нижней челюстей нажимают на функциональные контактные кнопки (5), выполняющие функции кнопок «мыши» (фиг.1). Для переключения рода работ, например для работы устройства как аналогового джойстика, нажимают на управляющую контактную кнопку переключения рода работ (6) и выбирают нужную функцию, представленную в меню. При замыкании токопроводящих концентрических дорожек резистивным слоем и при нажатии контактов кнопок (5) и (6) ток, возникающий в цепи, через микроконтроллер (10) и далее через токопроводящие дорожки (9) шлейфа (8) поступает на разъем (11), который в свою очередь соединен с блоком обработки сигналов (3), в котором сигнал обрабатывается и оцифровывается. Затем сигнал поступает в передатчик (4) и по каналу связи передается на внешний приемник радиосигналов (18), подключенный к компьютеру.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВВОДА КООРДИНАТ ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ БЕЗ ПОМОЩИ РУК | 2008 |
|
RU2372880C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ ДЛЯ ЧЕЛОВЕКА С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2007 |
|
RU2362519C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ ДЛЯ ЧЕЛОВЕКА С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2006 |
|
RU2312639C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ ДЛЯ ЧЕЛОВЕКА С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2004 |
|
RU2269325C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ БЕЗ ПОМОЩИ РУК | 2007 |
|
RU2355365C2 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ В РОТОВОЙ ПОЛОСТИ ЧЕЛОВЕКА ПРИБОРА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ | 2007 |
|
RU2331388C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ БЕЗ ПОМОЩИ РУК (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ БЕЗ ПОМОЩИ РУК | 2008 |
|
RU2373902C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВНЕШНИМИ СРЕДСТВАМИ (ВАРИАНТЫ) | 2003 |
|
RU2245692C2 |
| МАНИПУЛЯТОР ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ УСТРОЙСТВАМИ/КОМПЬЮТЕРОМ | 2013 |
|
RU2542369C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПРОСТРАНСТВЕННОЙ ДЕЗОРИЕНТАЦИИ У ЧЕЛОВЕКА | 2010 |
|
RU2425667C1 |
Изобретение относится к медицине и может быть использовано для людей с параличами верхних и нижних конечностей. Устройство содержит электрически связанные блок питания, задающее координаты и управляющее курсором компьютера координатное приспособление, выполненное с возможностью его размещения в ротовой полости, блок обработки сигналов, передатчик, две функциональные контактные кнопки для выполнения функций кнопок «мыши» и одну кнопку переключения рода работ. Координатное приспособление снабжено отгибным выступом, шлейфом токопроводящих дорожек, микроконтроллером, размещенным в шлейфе и включенным в цепь токопроводящих дорожек, и электрическим разъемом, установленным на конце шлейфа токопроводящих дорожек с возможностью его электрического соединения с блоком обработки сигналов. Координатное приспособление выполнено в форме полого диска с закругленной по радиусу внешней кромкой. Внутренняя полость диска образована первым слоем и вторым слоем гибкой полимерной пленки, соединенных по внешнему контуру. Первый слой полого диска имеет форму полусферы, вогнутой внутрь полости диска. Второй слой полого диска имеет плоскую форму, на внутренней поверхности которого нанесены токопроводящие концентрические дорожки, сгруппированные в четыре взаимно перпендикулярных сектора. При этом токопроводящие концентрические дорожки соседних секторов разделены друг от друга общей токопроводящей дорожкой, а расстояние между токопроводящими концентрическими дорожками уменьшается от центра диска к периферии. На внутренней поверхности вогнутой полусферы диска нанесен резистивный слой, который выполнен в виде радиальных резистивных отрезков, расположенных в виде концентрических колец. Каждое кольцо расположено над соответствующими токопроводящими концентрическими дорожками, ширина концентрических колец, как и длина резистивных отрезков, равна расстоянию между соответствующими токопроводящими концентрическими дорожками. Первый и второй слои полимерной пленки соединены друг с другом в центральной части полого диска с образованием центральной перемычки. Отгибной выступ и шлейф токопроводящих дорожек образованы первым и вторым слоями полимерной пленки, скрепленными по их плоской поверхности. Отгибной выступ и шлейф соединены с кромкой диска. Функциональные контактные кнопки и кнопка переключения рода работ размещены в отгибном выступе Технический результат заключается в улучшении эксплуатационных характеристик. 2 з.п. ф-лы, 4 ил.
1. Устройство ввода координат для дистанционного управления компьютером человеком с ограниченными физическими возможностями, содержащее электрически связанные блок питания, задающее координаты и управляющее курсором компьютера координатное приспособление, выполненное с возможностью его размещения в ротовой полости, блок обработки сигналов, передатчик, по меньшей мере две функциональные контактные кнопки для выполнения функций кнопок «мыши», и по меньшей мере, одну кнопку переключения рода работ, отличающееся тем, что координатное приспособление выполнено в форме полого диска с закругленной по радиусу внешней кромкой, полость которого образована первым и вторым слоями гибкой полимерной пленки, соединенными по внешнему контуру и в центральной части полого диска с образованием центральной перемычки, при этом первый слой имеет форму полусферы, вогнутой внутрь полости диска, а второй - плоскую форму, на внутренней поверхности которого нанесены токопроводящие концентрические дорожки, сгруппированные в четыре взаимно перпендикулярных сектора, при этом токопроводящие концентрические дорожки соседних секторов разделены друг от друга общей токопроводящей дорожкой, а расстояние между токопроводящими концентрическими дорожками уменьшается от центра диска к периферии, на вогнутой внутренней поверхности первого слоя нанесен резистивный слой, выполненный в виде радиальных резистивных отрезков, образующих концентрические кольца так, что каждое кольцо расположено над соответствующими токопроводящими концентрическими дорожками, ширина концентрических колец и длина резистивных отрезков равна расстоянию между соответствующими токопроводящими концентрическими дорожками, координатное приспособление снабжено отгибным выступом и шлейфом токопроводящих дорожек образованными скрепленными по их плоской поверхности первым и вторым слоями полимерной пленки и соединенными с кромкой диска, при этом шлейф токопроводящих дорожек снабжен микроконтроллером и электрическим разъемом на конце для соединения с блоком обработки сигналов, а в отгибном выступе размещены функциональные контактные кнопки и кнопка переключения рода работ, токопроводящие концентрические дорожки и концентрические кольца резистивного слоя, при этом функциональные контактные кнопки, по меньшей мере, одна кнопка переключения рода работ и микроконтроллер через соответствующие токопроводящие дорожки шлейфа и разъем электрически связаны с блоком обработки сигналов.
2. Устройство по п.1, отличающееся тем, что радиальные резистивные отрезки соседних колец соединены друг с другом общей резистивной дорожкой.
3. Устройство по п.1 или 2, отличающееся тем, что поверхность токопроводящих концентрических дорожек выполнена зернистой.
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ ДЛЯ ЧЕЛОВЕКА С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2004 |
|
RU2269325C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ ДЛЯ ЧЕЛОВЕКА С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2006 |
|
RU2312639C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВНЕШНИМИ СРЕДСТВАМИ (ВАРИАНТЫ) | 2003 |
|
RU2245692C2 |
| RU 95110648 А, 27.05.1997 | |||
| US 5460186 А, 24.10.1995 | |||
| JP 10124243 15.05.1998 | |||
| US 6222524 24.04.2001 | |||
| WO 03013402 20.02.2003. | |||

