Изобретение относится к координатным устройствам (манипуляторам) для управления человека компьютером или другими электронными устройствами.
Из патента RU 2269325 C1, опубл. 10.02.2006 г., известно устройство управления компьютером (манипулятор) для человека с ограниченными физическими возможностями, которое содержит электрически связанные блок питания, координатное приспособление, блок обработки сигналов и передатчик с антенной. Координатное приспособление состоит из непроводящей электрический ток пластины прямоугольной формы, каретки, подвижной относительно продольной оси пластины, спаренного контакта, электрически связанного через проводник с блоком обработки сигналов и установленного на каретке с возможностью перемещения спаренного контакта по каретке и из управляющей клавиши, жестко закрепленной на спаренном контакте. Устройство размещают в ротовой полости человека и обращают управляющей клавишей к кончику языка. Поверхность управляющей клавиши выполнена рельефной. Поверхность пластины имеет два резистивных поля. Каждое поле разделено на равные части непроводящей электрический ток полосой. Первое резистивное поле имеет по краям проводящие электрический ток вертикальные контактные площадки. Второе резистивное поле имеет по краям проводящие электрический ток горизонтальные контактные площадки. Все контактные площадки через проводники соединены с блоком обработки сигналов.
Недостатками этого известного устройства являются:
- механическая сложность, влекущая пониженную надежность,
- проблемы с изоляцией элементов датчиков от слюны, попадание которой как электролита на элементы датчиков приведет к потере работоспособности устройства,
- невозможность обеспечить движение по поверхности резистивной площадки без использования соответствующих направляющих и прижимных устройств, что увеличивает габариты устройства и создает чрезмерные нагрузки на язык,
- заполнение координатным устройством и проводами большого объема полости рта,
- сложность установки.
Известно устройство для дистанционного управления компьютером для человека с ограниченными физическими возможностями, которое содержит координатное приспособление, размещенное в ротовой полости, и блок обработки сигналов, электрически связанный с координатным приспособлением (US 5460186 A, 24.10.1995). Это устройство выбрано нами в качестве ближайшего аналога.
Данное устройство позволяет управлять компьютером путем воздействия языка на рычаг-джойстик. Однако координатное приспособление выполнено без учета особенностей управления языком, оно громоздкое и занимает значительную часть ротовой полости. Удлиненный рычаг-джойстик оттесняет язык, и для управления рычагом-джойстиком требуется напряжение мышц, отводящих язык в заднем направлении. Это вызывает быструю усталость, точность выполнения движений снижается. В то же время наиболее удобной, физиологичной, эффективной, точно координируемой и наименее утомительной для мышц языка зоной является задняя поверхность передних зубов и передняя треть твердого неба. В данном известном устройстве используется другая зона управления.
Технический результат заявляемого технического решения в том, что применение интегральных датчиков линейных или угловых ускорений (акселерометр/гироскоп) существенно снижает нагрузку на язык, перемещение курсора компьютера по любой произвольной траектории становится более точным, уменьшаются размеры помещаемого во рту манипулятора, повышается надежность за счет отсутствия механических датчиков, облегчается задача полной герметизации устройства, уменьшается энергопотребление. Кроме того, обеспечивается управление также поворотами и другими движениями головы, что дает дополнительные возможности управления, увеличивая размерность пространства управления.
Заявляется манипулятор для управления компьютером или другим электронным устройством, включающий корпус манипулятора, располагаемый в полости рта, джойстик, размещенный одним концом на корпусе с возможностью перемещения языком другого его конца, датчики положения джойстика относительно корпуса, блок обработки сигналов, источник питания, канал связи с управляемым устройством, отличающийся тем, что в качестве датчика положения джойстика относительно корпуса манипулятора используются пара интегральных акселерометров и/или гироскопов, один из которых размещен на джойстике, а другой - на корпусе, блок обработки сигналов по измерениям этих акселерометров/гироскопов вычисляет покоординатную разность этих измерений, характеризующую положение джойстика относительно корпуса, являющуюся выходом манипулятора, блок обработки сигналов и источник питания расположены в корпусе манипулятора, корпус выполнен дугообразным для размещения в преддверии полости рта между губами и передними зубами.
Возможно выполнение манипулятора таким, что показания размещенных на корпусе акселерометров/гироскопов, обработанные блоком обработки сигналов, тоже будут являться выходом устройства.
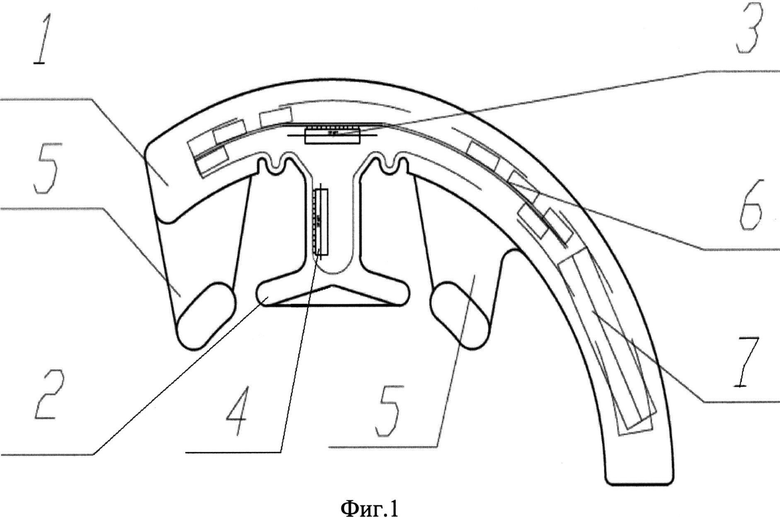
На фиг.1 показано схематическое устройство варианта реализации заявляемого устройства, где:
1 - корпус устройства;
2 - грибок джойстика;
3 - акселерометр/гироскоп корпуса координатного приспособления;
4 - акселерометр/гироскоп джойстика координатного приспособления;
5 - ограничители;
6 - процессор и модуль связи с компьютером;
7 - источник питания.
Пример реализации заявляемого устройства
Предлагается индивидуальное устройство для управления компьютером или любым другим исполнительным механизмом без использования рук. Устройство представляет собой герметичный пластиковый корпус 1, который целиком берется в рот так, что дугообразная часть корпуса 1 оказывается в преддверии полости рта - между губами и передними зубами, а грибок джойстика координатного приспособления 2 - перед кончиком языка пользователя. Грибок джойстика координатного приспособления 2 можно перемещать языком по любой произвольной желаемой траектории. Акселерометр/гироскоп 3 корпуса координатного приспособления жестко связан с корпусом устройства 1 и определяет его положение в пространстве. Акселерометр/гироскоп 4 жестко связан с джойстиком и определяет его положение в пространстве. В дугообразной части устройства расположена плата процессора и модуля связи с управляемым устройством 6, а также источник питания 7. Блок обработки сигналов - это процессор со специальным программным обеспечением. Программное обеспечение позволяет преобразовать пространственное положение акселерометров/гироскопов 3 и 4 в перемещение курсора и другие сигналы типа "клик" или "двойной клик" на экране компьютера или перемещение исполнительного механизма и т.п. Блок обработки сигналов по измерениям этих акселерометров/гироскопов вычисляет покоординатную разность этих измерений, характеризующую положение джойстика относительно корпуса, являющуюся выходом манипулятора. В качестве источника питания может быть использована литиевая батарея или аккумулятор.
Устройство берется в рот так, что дуга оказывается в преддверии ротовой полости между губами и передними зубами. В полости рта находятся только грибок джойстика 2 и два ограничителя 5, являющиеся опорой для передних зубов и служащие для надежной фиксации устройства во время работы, а также для создания зазора между передними зубами, необходимого для перемещений джойстика. Грибок джойстика 2 можно перемещать языком (вверх, вниз, влево, вправо, по любой произвольной траектории, вперед).
Прототип устройства был изготовлен на основе крупносерийно выпускаемых интегральных акселерометров/гироскопов, характеристики которых полностью соответствуют требуемым для заявляемого устройства (см. информацию на сайте http://www.st.com). Использование акселерометров/гироскопов позволяет полностью отказаться от контактных устройств (кнопок) и разного рода направляющих, проводов и плат в полости рта, а также значительно снизить нагрузку на язык.
За счет того, что выходом устройства являются не только выдаваемые блоком обработки сигналов координаты джойстика относительно корпуса манипулятора, но и координаты корпуса манипулятора в пространстве, становится возможным использовать положение корпуса манипулятора (то есть головы при установленном во рту манипуляторе) в качестве дополнительного фактора управления компьютером или другим электронным устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ ДЛЯ ЧЕЛОВЕКА С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2004 |
|
RU2269325C1 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ БЕЗ ПОМОЩИ РУК | 2008 |
|
RU2372880C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ ДЛЯ ЧЕЛОВЕКА С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2007 |
|
RU2362519C1 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ ЧЕЛОВЕКОМ С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2008 |
|
RU2388434C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ ДЛЯ ЧЕЛОВЕКА С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2006 |
|
RU2312639C1 |
| СПОСОБ ОСОБО ТОЧНОЙ ОБРАБОТКИ ЗУБОВ И ПОРТАТИВНАЯ УСТАНОВКА С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ МАЛОГАБАРИТНОГО УСТРОЙСТВА ДЛЯ ОБРАБОТКИ ЗУБОВ | 2010 |
|
RU2443396C1 |
| СТОМАТОЛОГИЧЕСКИЙ ПРИБОР "ВЕСТИБУЛОТОНОМЕТР" ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ВОЗДЕЙСТВИЯ МЫШЦ, ОКРУЖАЮЩИХ РОТОВУЮ ЩЕЛЬ, НА ЗУБЫ И ЧЕЛЮСТИ | 2007 |
|
RU2355357C2 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ | 2016 |
|
RU2669084C2 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ | 2017 |
|
RU2669093C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВНЕШНИМИ СРЕДСТВАМИ (ВАРИАНТЫ) | 2003 |
|
RU2245692C2 |
Изобретение относится к манипуляторам для управления человека компьютером или другими электронными устройствами. Манипулятор включает корпус, располагаемый в полости рта, джойстик, размещенный одним концом на корпусе с возможностью перемещения языком другого его конца, датчики положения джойстика относительно корпуса, блок обработки сигналов, источник питания, канал связи с управляемым устройством. В качестве датчика положения джойстика относительно корпуса используются пара интегральных акселерометров и/или гироскопов, один из которых размещен на джойстике, а другой - на корпусе, блок обработки сигналов по измерениям этих акселерометров/гироскопов вычисляет покоординатную разность этих измерений, характеризующую положение джойстика относительно корпуса, являющуюся выходом манипулятора, блок обработки сигналов и источник питания расположены в корпусе манипулятора, корпус выполнен дугообразным для размещения в преддверии полости рта между губами и передними зубами. Показания размещенных на корпусе акселерометров/гироскопов, обработанные блоком обработки сигналов, также являются выходом устройства. Использование изобретения позволяет существенно снизить нагрузку на язык, обеспечить большую точность при перемещении курсора компьютера по любой произвольной траектории, повысить надежность за счет отсутствия механических датчиков. Кроме того, облегчается задача полной герметизации устройства, уменьшаются энергопотребление и размеры помещаемого во рту манипулятора, обеспечивается управление также поворотами и другими движениями головы, что дает дополнительные возможности управления, увеличивая размерность пространства управления. 1 з.п. ф-лы, 1 ил.
1. Манипулятор для управления компьютером или другим электронным устройством, включающий корпус манипулятора, располагаемый в полости рта, джойстик, размещенный одним концом на корпусе с возможностью перемещения языком другого его конца, датчики положения джойстика относительно корпуса, блок обработки сигналов, источник питания, канал связи с управляемым устройством, отличающийся тем, что в качестве датчика положения джойстика относительно корпуса используются пара интегральных акселерометров и/или гироскопов, один из которых размещен на джойстике, а другой - на корпусе, блок обработки сигналов по измерениям этих акселерометров/гироскопов вычисляет покоординатную разность этих измерений, характеризующую положение джойстика относительно корпуса, являющуюся выходом манипулятора, блок обработки сигналов и источник питания расположены в корпусе манипулятора, корпус выполнен дугообразным для размещения в преддверии полости рта между губами и передними зубами.
2. Манипулятор по п.1, отличающийся тем, что показания размещенных на корпусе акселерометров/гироскопов, обработанные блоком обработки сигналов, тоже являются выходом устройства.
| WO2004084775 A1; 07.10.2004 | |||
| US6222524 B1; 24.04.2001 | |||
| CN102553231 A; 11.07.2012 | |||
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ ДЛЯ ЧЕЛОВЕКА С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2004 |
|
RU2269325C1 |
| US8115657 B2; 14.02.2012 | |||

