Область техники, к которой относится изобретение
Изобретение относится к области медицины и медицинской техники, в частности, к устройствам для эндоскопических малоинвазивных оперативных вмешательств.
Уровень техники
Известны ригидные и фиброэндоскопы для наблюдения операционного поля при проведении диагностических процедур и малоинвазивных операций в различных областях медицины. Эти устройства содержат наружную трубку, жестко соединенную с корпусом, внутри наружной трубки расположена внутренняя трубка с оптической системой, передающей изображение операционного поля через окуляр, закрепленный в корпусе, для визуального наблюдения. На наружной трубке закреплен световой разъем, в котором закреплено световодное волокно, расположенное в пространстве между трубками и передающее световой поток для освещения операционного поля.
К таким устройствам относятся ригидные и фиброэндоскопы, применяемые для визуального наблюдения за объектами операционного поля при проведении диагностических и хирургических процедур.
Недостатком вышеуказанных эндоскопов является невозможность получения объемного изображения.
Известно устройство со стереоскопическим эффектом - стереомикроскоп Грену (Беккер) (Л.Мартин. Техническая оптика. Издательство Физ.-мат. Литература, Москва, 1960), состоящий из двух оптических трубок с линзовой оптикой, имеющих идентичные оптические параметры. Оптические системы стереомикроскопа выполнены в виде двух оптических трубок, оптические оси которых образуют угол 15 градусов. Окулярная часть стереомикроскопа позволяет привести расстояние между осями оптических систем в соответствие с межзрачковым расстоянием глаз.
Недостатком этого устройства является невозможность использования при малоинвазивных операциях.
Наиболее близким техническим решением является «Пара оптических систем для стереоэндоскопической системы» патент США №6898022 (прототип), содержащее правый и левый оптические каналы, каждый из которых содержит трубку с оптической системой, ось которой соединена с передней осью раздвигающей призмы, задняя ось которой совпадает с оптической осью выходного объектива, строящего изображение на датчике и приемный датчик изображения.
Недостатком данного устройства является то, что при приближении или удалении объектов операционного поля относительно дистального конца эндоскопа и одновременной осевой фокусировке происходит разностороннее поперечное смещение изображений на приемных датчиках.
Раскрытие изобретения
Задачей изобретения является создание стереоэндоскопа для проведения малоинвазивных эндоскопических операций, получение объемного изображения объекта операции, что позволит улучшить качество хирургической помощи.
Согласно изобретению стереоэндоскоп содержит правый и левый каналы, каждый из которых содержит трубку с оптической системой, призму, входной и выходной объективы, при этом ось оптической системы трубки соосна с передней осью призмы, задняя оптическая ось которой соосна с оптической осью входного объектива, а выходной объектив оптически связан с датчиком изображения, между входным и выходным объективами введен промежуточный объектив, оптические оси которого не соосны - по входу с оптической осью оптической системы входного объектива, а по выходу с оптической осью оптической системы выходного объектива, при этом выходной объектив соединен с устройством перемещения.
Технический результат состоит в получении стереоизображения объектов операционного поля, позволяющего повысить качество хирургической помощи.
Предпочтительно в каждом канале оптическая прямая, проходящая через задний фокус входного объектива и передний фокус промежуточного объектива, расположена под углом по отношению к оптическим осям указанных объективов, величина которого определяется, как
α=arctg(m/2F1), где m - расстояние между осями оптических систем трубок;
F1 - фокусное расстояние, определяемое на выходе входного объектива.
Технический результат оптического соединения заднего фокуса оптической системы канала и переднего фокуса оптической системы промежуточного объектива связан с обеспечением сдвига дистального конца стереоэндоскопа относительно объектов операционного поля.
Расстояние между осями оптических систем промежуточного и выходного объективов может определяться как
d=F2 tg α,
где F2 - заднее фокусное расстояние промежуточного объектива.
Технический результат несоосности оптических осей промежуточного объектива и выходного объектива связан с передачей изображения объектов операционного поля на всю плоскость датчика изображения.
Краткое описание чертежей
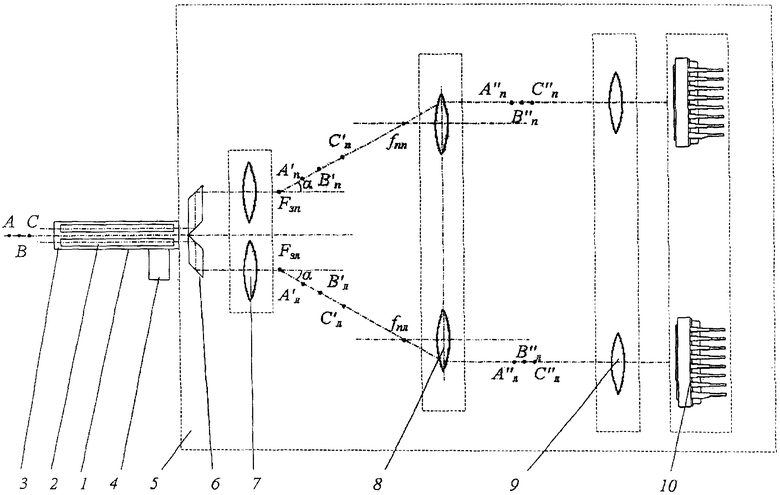
На чертеже представлена структурная схема стереоэндоскопа.
Осуществление изобретения
Стереоэндоскоп содержит наружную трубку 1, внутри которой расположены две внутренние трубки 2 с идентичными оптическими системами, в пространстве между наружной и внутренними трубками расположено световодное волокно 3, выходящее проксимальным концом в световодный разъем 4, корпус стереоэндоскопа 5, к которому присоединены внутренние трубки 2, а выходы их оптических осей сосны входным оптическим осям двух призм 6, выходные оси которых соосны с оптическими осями идентичных входных объективов 7, промежуточные объективы 8, выходные объективы 9, связанные с устройством перемещения и оптически соединенные с блоком 10 преобразования изображения, внутри которого расположены датчики изображения. А, В, С - объекты операционного поля, А'п, В'п, С'п, А'л, В'л, С'л - соответственно изображения объектов операционного поля на выходе входных объективов правого и левого канала, Fзп, Fзл - задние фокусы соответственно правого и левого каналов, fпп, fпл - передние фокусы промежуточного объектива для правого и левого каналов соответственно, А"п, В”п, С”п, А”л, В”л, С”л - изображение объектов операционного поля на выходе промежуточных объективов правого и левого каналов, α - угол, образованный между оптической прямой, соединяющей фокусы Fзп и fпп и осью входного объектива.
Работа стереоэндоскопа осуществляется следующим образом
Поскольку правый и левый канал идентичны, работа стереоэндоскопа может быть рассмотрена на примере одного из каналов, например правого канала. Правый канал образуют оптическая система, расположенная во внутренней трубке 2, расположенной справа относительно дистального конца стереоэндоскопа со стороны наблюдения, призма 6, входной объектив 7, промежуточный объектив 8, выходной объектив 9 и блок 10 преобразования изображения. Пусть перед дистальным концом наружной трубки 1 эндоскопа расположены объекты А, В, С, освещаемые внешним источником света через световодный разъем 4 и световодное волокно 3. Оптическая трубка 2 обладает определенным углом поля зрения, поэтому изображение этих объектов будет передано по правому каналу и таким образом оптическое изображение объектов А, В, С сформируется на выходе оптической системы входного объектива 7. Из-за несоосности оптических осей входного и промежуточного объективов изображение объектов А'п, В'п, С'п будет расположено на оптической прямой, соединяющей их соответствующие фокусы Fзп и fпп. При горизонтальном движении дистального конца стереоэндоскопа вправо и влево смещение изображений А'п, В'п, С'п будет происходить вдоль этой оптической прямой, расположенной таким образом, что угол, образованный между ней и осью входного объектива, определяется как:
α=arctg(m/2F1), где m - расстояние между осями оптических систем трубок;
F1 - фокусное расстояние, определяемое на выходе входного объектива.
Пройдя оптическую систему промежуточного объектива 8, изображение указанных объектов А"п, В"п, С"п будет сформировано на выходе объектива 8 правого канала и будет передано на оптическую систему выходного объектива 9. Величина несоосности этих оптических систем определяется как:
d=F2tg α,
где F2 - заднее фокусное расстояние промежуточного объектива.
Сформированное изображение на выходе оптической системы выходного объектива 9 фокусируется на датчике изображения, расположенном в блоке 10 преобразования изображения. Для получения резкого изображения выходной объектив 9 соединен с устройством перемещения.
Левый канал осуществляет аналогичную передачу изображения объектов операционного поля.
В итоге, при совмещении передаваемых изображений правым и левым каналами и преобразования изображения блоком 10 преобразования, на стереомонитор передается объемное изображение операционного поля.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИДЕОЭНДОСКОП | 2009 |
|
RU2420222C2 |
| ЭНДОСКОП-МИКРОСКОП | 2004 |
|
RU2267978C1 |
| ВИДЕОЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2009 |
|
RU2390305C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ ВВЕДЕНИЯ ГИБКИХ ТРУБОК | 2015 |
|
RU2578802C1 |
| ВИДЕОЭНДОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2014 |
|
RU2664163C2 |
| СПОСОБ ПОЛУЧЕНИЯ СТЕРЕОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ОДНОГО ПРИЕМНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433435C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2013 |
|
RU2548379C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2003 |
|
RU2239179C1 |
| Устройство для записи киноизображения на кинопленку | 1982 |
|
SU1026110A1 |
| ЛАЗЕРНЫЙ БИНОКЛЬ-ДАЛЬНОМЕР | 2010 |
|
RU2443976C1 |
Изобретение относится к области медицины и медицинской техники, в частности, к устройствам для эндоскопических малоинвазивных оперативных вмешательств. Стереоэндоскоп содержит правый и левый каналы. Каждый из каналов содержит трубку с оптической системой, призму, входной и выходной объективы. Ось оптической системы трубки соосна с передней осью призмы, задняя оптическая ось которой соосна с оптической осью входного объектива. Выходной объектив оптически связан с датчиком изображения. Между входным и выходным объективами введен промежуточный объектив, оптические оси которого не соосны - по входу с оптической осью оптической системы входного объектива, а по выходу с оптической осью оптической системы выходного объектива. Выходной объектив соединен с устройством перемещения. Изобретение обеспечивает получение стереоизображений объектов операционного поля, позволяющих повысить качество хирургической помощи. 2 з.п. ф-лы, 1 ил.
1. Стереоэндоскоп, содержащий правый и левый каналы, каждый из которых содержит трубку с оптической системой, призму, входной и выходной объективы, при этом ось оптической системы трубки соосна с передней осью призмы, задняя оптическая ось которой соосна с оптической осью входного объектива, а выходной объектив оптически связан с датчиком изображения, отличающийся тем, что между входным и выходным объективами введен промежуточный объектив, оптические оси которого не соосны - по входу с оптической осью оптической системы входного объектива, а по выходу с оптической осью оптической системы выходного объектива, при этом выходной объектив соединен с устройством перемещения.
2. Стереоэндоскоп по п.1, отличающийся тем, что в каждом канале оптическая прямая, проходящая через задний фокус входного объектива и передний фокус промежуточного объектива, расположена под углом по отношению к оптическим осям указанных объективов, величина которого определяется, как
α=arctg(m/2F1), где m - расстояние между осями оптических систем трубок;
F1 - фокусное расстояние, определяемое на выходе входного объектива.
3. Стереоэндоскоп по п.2, отличающийся тем, что расстояние между осями оптических систем промежуточного и выходного объективов, определяется как
d=F2tgα,
где F2 - заднее фокусное расстояние промежуточного объектива.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ЛАЗЕРНЫЙ СТЕРЕОЭНДОСКОП | 2006 |
|
RU2324958C1 |
| ДВУХКАНАЛЬНЫЙ ЗЕРКАЛЬНО-ЛИНЗОВЫЙ ОБЪЕКТИВ (ВАРИАНТЫ) | 2003 |
|
RU2256205C2 |
| FR 211783 А1, 25.02.1987 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Способ получения -алкилированных органических соединений | 1971 |
|
SU667547A1 |
| DE 19549456 B4, 24.05.2006. | |||

