Изобретение относится к области судостроения, а более конкретно к экспериментальной гидромеханике, и касается вопросов проведения испытаний в опытовых бассейнах моделей плавучих морских инженерных сооружений с протяженными якорными системами удержания.
Якорная система позиционирования обеспечивает удержание плавучего объекта, например буровой платформы, над точкой бурения в пределах допустимых отклонений от оси скважины под действием волнения, ветра и течения. Глубина акватории в месте эксплуатации плавучих объектов изменяется в широких пределах и может доходить до 4000 м. На небольших глубинах используются системы удержания с широко разнесенными якорями и длиной якорных связей до 2000 м. Прямое моделирование глубоководных систем удержания плавучего объекта или широко разнесенных систем удержания не представляется возможным во всех существующих опытовых бассейнах из-за ограничений по глубине и ширине бассейна.
Бассейны, привлеченные к исследованиям динамики заякоренных объектов на волнении, используют усеченную (укороченную) одноветвенную модель якорной системы удержания. Такие системы считаются эквивалентными натуре только по каким-то определенным характеристикам, поскольку при использовании в опытовых бассейнах усеченных одноветвенных моделей якорных связей невозможно выдержать соотношение между горизонтальной и вертикальной составляющими общего натяжения как в натуре. Объясняется это тем, что при горизонтальном смещении модели плавучего объекта с усеченной одноветвенной якорной связью из-за ее малой длины возникают неоправданно большие горизонтальные составляющие сил общего натяжения на клюзе (место крепления якорной связи на корпусе плавучего объекта). В натуре якорные связи имеют очень большую длину и при том же горизонтальном смещении плавучего объекта горизонтальные составляющие сил общего натяжения незначительны. Это обстоятельство сильно искажает динамику модели плавучего объекта на волнении при модельных испытаниях в опытовом бассейне. Поэтому разработка способа и конструкции модели якорной связи, способной моделировать полный вектор натяжения на клюзе, является актуальной задачей.
Известны способ проведения испытаний в опытовом бассейне моделей плавучих объектов, имеющих протяженные якорные системы удержания, и устройство для его осуществления, основанные на методике комбинированных модельных испытаний. Согласно этой методике сначала проводят эксперимент в опытовом бассейне с моделью плавучего объекта с использованием усеченной одноветвенной модели системы заякорения. При этом испытываемую модель удерживают с помощью якорных связей, каждая из которых состоит из одной гибкой линии, оснащенной упругим элементом, после чего оказывают на модель внешние волновые воздействия и регистрируют параметры эксперимента. Полученные экспериментальные данные используют для корректировки численной модели применительно к выполненному (усеченному) эксперименту. Затем откорректированную таким образом компьютерную модель используют для получения окончательных результатов при численном (полноглубинном) моделировании (Ocean Engineering Committee of 24 ITTC, 2005) - прототип.
Однако известный комбинированный способ моделирования и устройство для его реализации (усеченная одноветвенная модель якорной связи) не обеспечивают получение достоверных результатов испытаний, поскольку оценка динамики плавучего объекта с заданными протяженными якорными связями здесь производится только расчетом. Другими словами, известный комбинированный способ моделирования не позволяет производить достоверную экспериментальную оценку усилий в протяженных якорных связях, а также характеристик качки плавучего объекта на волнении. Кроме того, в отношении сильных нелинейных эффектов (изменение клиренса на волнении, заливание, слеминг и т.д.), для которых численное моделирование в настоящее время не является хорошо отработанным и точным, комбинированный способ моделирования не дает достаточно надежных данных.
Задачей предлагаемого изобретения является получение достоверных данных испытаний на волнении моделей плавучих объектов с протяженными якорными системами удержания в части обеспечения соответствия горизонтальной и вертикальной составляющих общего натяжения в якорных связях модели и натуры.
Для достижения этого в известном способе проведения в опытовом бассейне испытаний моделей плавучих объектов с протяженными якорными системами удержания, согласно которому модель плавучего объекта крепят к основанию бассейна с помощью усеченных якорных связей, состоящих каждая из одной гибкой линии с упругим элементом, затем оказывают на модель внешние волновые воздействия и регистрируют параметры эксперимента, по изобретению крепление испытываемой модели к основанию бассейна осуществляют посредством двухветвенных гибких линий связи, с которыми модель соединяют подвижно через свободно подвешенные к ее корпусу ролики. При этом парным ветвям гибких линий связи придают различную жесткость, а концы ветвей закрепляют на основании бассейна в отстоящих друг от друга точках.
В устройстве для проведения в опытовом бассейне испытаний моделей плавучих объектов с протяженными якорными системами удержания, включающем усеченные якорные связи, состоящие каждая из одной гибкой линии связи с упругим элементом, с помощью которых испытываемая модель присоединена к основанию бассейна, по изобретению якорные связи выполнены в виде двухветвенных гибких линий связи, между ветвями которых помещены установленные на модели ролики, которые прикреплены к ее корпусу преимущественно на гибкой связи. При этом вторые ветви гибких линий также оснащены упругим элементом, причем упругие элементы парных ветвей гибких линий связи имеют различную жесткость, а другой конец ветвей указанных гибких линий прикреплен к основанию бассейна в соответствующей точке, отстоящей от точки закрепления их первого конца.
Осуществление крепления испытываемой модели к основанию бассейна посредством усеченных двухветвенных гибких линий связи подвижно через ролики, которые помещены между ветвями и установлены на модели прикрепленными преимущественно на гибкой связи, а также придание парным ветвям гибких линий связи различной жесткости обеспечивает выполнение соответствия горизонтальной Тх и вертикальной Tz составляющих общего натяжения Tk на клюзе натуры и модели (фиг.2). Это достигается тем, что при воздействии волнения на модель в каждой якорной связи создается параллелограмм сил (фиг.2), равнодействующая которых правильно воспроизводит величину и угол наклона вектора полного натяжения Tk на клюзе. В прототипе и в известных одноветвенных моделях протяженных якорных связей вектор Tk всегда направлен по линии связи и в этом случае угол наклона вектора Tk не воспроизводится правильно. Положение точек крепления ветвей к основанию бассейна, а также жесткость упругих элементов парных ветвей и величина предварительного натяжения То в якорной системе (фиг.2) определяется расчетом.
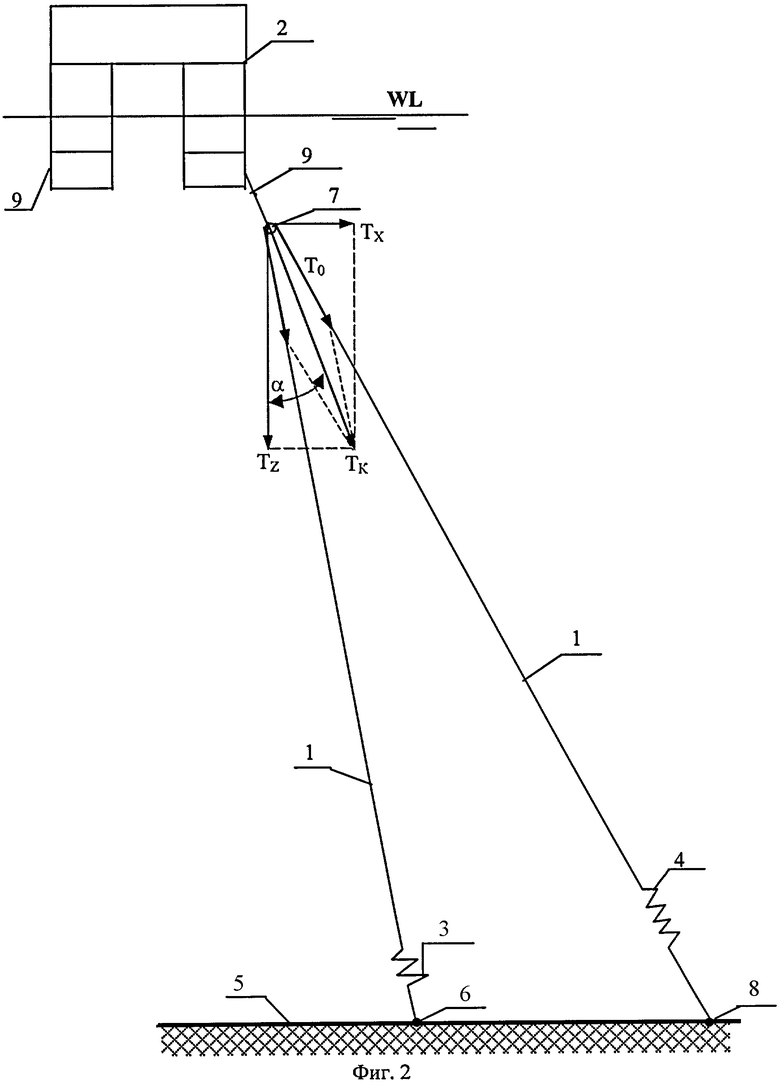
Сущность изобретения поясняется чертежами, на которых представлен вариант устройства для реализации предлагаемого способа, где на фиг.1 изображен общий вид испытываемой модели плавучего объекта, удерживаемой двухветвенными усеченными якорными связями в опытовом бассейне, а на фиг.2 показаны схематично модель плавучего объекта и предлагаемой усеченной двухветвенной якорной связи с усилиями, возникающими в гибкой линии связи.
Устройство для проведения в опытовом бассейне испытаний плавучих объектов с протяженными системами удержания содержит якорные связи 1 для удержания модели 2 при внешних волновых воздействиях на нее, которые выполнены каждая в виде усеченных двухветвенных гибких линий связи, ветви которых оснащены упругими элементами 3 и 4 соответственно. Причем упругие элементы 3 и 4 имеют различную жесткость. Один конец гибкой линии связи 1 прикреплен к основанию бассейна 5 в точке 6, другой конец гибкой линии связи 1, пропущенной через ролик 7, закреплен в точке 8. Испытываемая модель 2 соединена с гибкими линиями связи 1 с помощью роликов 7, которые прикреплены к ее корпусу преимущественно на гибкой связи 9. Ролики могут быть прикреплены непосредственно к корпусу модели без гибкой связи.
Предложенный способ реализуется с помощью предлагаемого устройства следующим образом. Модель плавучего объекта 2 крепят к основанию бассейна 5 с помощью усеченных двухветвенных якорных связей 1, нижние концы которых закрепляют на основании опытового бассейна 5 в отстоящих друг от друга точках 6 и 8 (фиг.1). Модель соединяют с двухветвенными связями через ролики 7, которые размещены между ветвями гибких линий связей и прикреплены к корпусу модели плавучего объекта 2. Затем оказывают на модель 2 внешние волновые воздействия и регистрируют требуемые параметры эксперимента (усилия на клюзе, характеристики качки по шести степеням свободы, заливание, слеминг и т.д.). В результате комплексного экспериментального исследования получают достоверные данные по динамическим усилиям в якорных связях и по качке. Полученные экспериментальные данные позволяют выполнить надежную оценку поведения натурных глубоководных заякоренных объектов в экстремальных волновых условиях выживания. Кроме того, эти данные позволяют разработчикам обоснованно проектировать различные буровые платформы или другие объекты океанотехники и производить оценку безопасности эксплуатации их в различных погодных условиях.
Предложенная модель системы позиционирования используется в Мореходном бассейне ЦНИИ им. акад. А.Н.Крылова при испытаниях в штормовых условиях моделей буровых платформ различных типов. Пригодность данной системы неоднократно подтверждалась специальными исследованиями. Например, по заказу норвежских специалистов фирмы Moss Maritime a.s. была выполнена экспериментальная работа по сравнению разработанного способа моделирования якорной системы удержания с прямым непосредственным моделированием. Для выполнения таких сравнительных испытаний была выбрана глубина моря 240 м, которая в выбранном масштабе полностью моделируется в Мореходном бассейне. Результаты сравнительных испытаний, полученные при двух вариантах моделирования системы удержания, показали их полное соответствие и подтвердили допустимость моделирования якорной системы позиционирования с помощью разработанных усеченных якорных связей.
Аналогичные разработки в зарубежных исследовательских центрах в настоящее время неизвестны.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПРОСТРАНСТВЕННЫХ КОЛЕБАНИЙ ПЛАВУЧИХ ОБЪЕКТОВ В ОПЫТОВОМ (ВОЛНОВОМ) БАССЕЙНЕ | 2016 |
|
RU2652173C2 |
| Способ проведения испытаний на всплытие модели морского инженерного погруженного сооружения в ледовом опытовом бассейне и устройство для испытаний на всплытие модели | 2015 |
|
RU2612073C1 |
| СПОСОБ ИСПЫТАНИЙ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ЛЕДОВОМ ОПЫТОВОМ БАССЕЙНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279654C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ БУРОВОЙ ПЛАТФОРМЫ В ОПЫТОВОМ БАССЕЙНЕ | 1999 |
|
RU2168438C2 |
| ТРОСОВЫЙ ДИНАМОМЕТР | 2003 |
|
RU2239166C1 |
| СПОСОБ ИСПЫТАНИЯ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ЛЕДОВОМ ОПЫТОВОМ БАССЕЙНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383462C2 |
| СПОСОБ ВОСПРОИЗВЕДЕНИЯ НЕРЕГУЛЯРНЫХ ВОЛН В ОПЫТОВОМ БАССЕЙНЕ | 1999 |
|
RU2165370C2 |
| ОПЫТОВЫЙ БАССЕЙН ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ СУДОВ ПРЕИМУЩЕСТВЕННО ВО ЛЬДАХ | 2007 |
|
RU2352493C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ОПЫТОВОМ БАССЕЙНЕ | 2005 |
|
RU2308397C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК МОДЕЛЕЙ ПЛАВУЧИХ ИНЖЕНЕРНЫХ ОБЪЕКТОВ, ОБОРУДОВАННЫХ ЯКОРНОЙ СИСТЕМОЙ УДЕРЖАНИЯ, И СПОСОБ ИХ ОПРЕДЕЛЕНИЯ | 2012 |
|
RU2509998C2 |
Изобретение относится к экспериментальной гидромеханике, в частности к испытаниям в опытовых бассейнах моделей плавучих морских инженерных сооружений с протяженными якорными системами удержания. Способ заключается в креплении модели плавучего объекта к основанию бассейна с помощью якорных связей, а затем оказании на модель внешних волновых воздействий и регистрации параметров эксперимента. При этом крепление испытываемой модели к основанию бассейна осуществляют посредством двухветвенных гибких линий связи, с которыми модель соединяют подвижно через свободно подвешенные к ее корпусу ролики. При этом парным ветвям гибких линий связи придают различную жесткость, а концы ветвей закрепляют на основании бассейна в отстоящих друг от друга точках. Устройство включает усеченные якорные связи, с помощью которых испытываемая модель присоединена к основанию бассейна. Якорные связи выполнены в виде двухветвенных гибких линий связи, между ветвями которых помещены установленные на модели ролики, которые прикреплены к ее корпусу преимущественно на гибкой связи. При этом вторые ветви гибких линий также оснащены упругим элементом, причем упругие элементы парных ветвей гибких линий связи имеют различную жесткость, а другой конец ветвей указанных гибких линий прикреплен к основанию бассейна в соответствующей точке, отстоящей от точки закрепления их первого конца. Технический результат заключается в приближении моделирования нагрузок в якорных связях к натурным условиям. 2 н. и 1 з.п. ф-лы, 2 ил.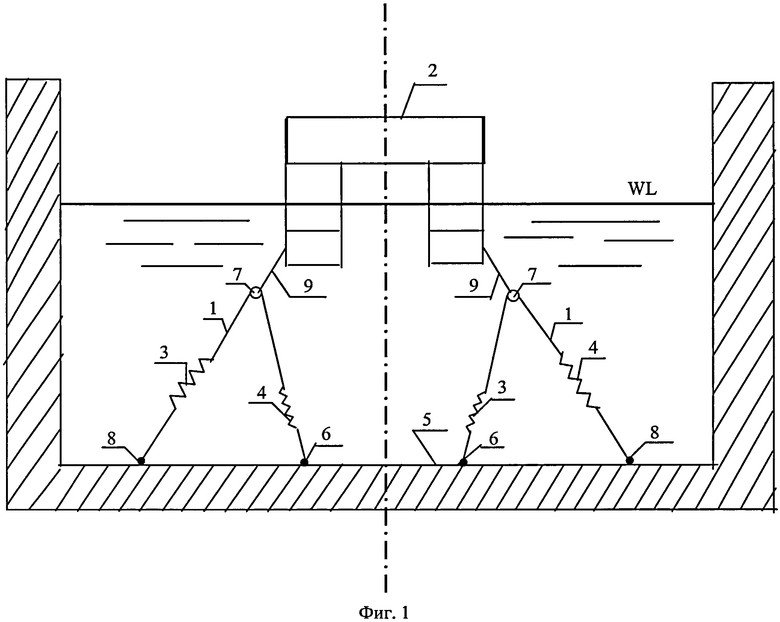
1. Способ проведения в опытовом бассейне испытаний моделей плавучих объектов с протяженными якорными системами удержания, согласно которому модель плавучего объекта крепят к основанию бассейна с помощью усеченных якорных связей, каждая из которых содержит гибкую линию с упругим элементом, затем оказывают на модель внешние волновые воздействия и регистрируют параметры эксперимента, отличающийся тем, что крепление испытываемой модели к основанию бассейна осуществляют посредством двухветвенных гибких линий связи, с которыми модель соединяют подвижно через свободно подвешенные к ее корпусу ролики, при этом парным ветвям гибких линий связи придают различную жесткость, а концы ветвей закрепляют на основании бассейна в отстоящих друг от друга точках.
2. Способ проведения в опытовом бассейне испытаний моделей плавучих объектов по п.1, отличающийся тем, что ролики крепят к испытываемой модели путем подвешивания каждого из них на гибкой связи.
3. Устройство для проведения в опытовом бассейне испытаний моделей плавучих объектов с протяженными якорными системами удержания, включающее усеченные якорные связи, каждая из которых содержит гибкую линию связи с упругим элементом, с помощью которых испытываемая модель присоединена к основанию бассейна, отличающееся тем, что якорные связи выполнены в виде двухветвенных гибких линий связи, между ветвями которых помещены установленные на модели ролики, которые прикреплены к ее корпусу преимущественно на гибкой связи, при этом вторые ветви гибких линий также оснащены упругим элементом, причем упругие элементы парных ветвей гибких линий связи имеют различную жесткость, а другой конец ветвей указанных гибких линий прикреплен к основанию бассейна в соответствующей точке, отстоящей от точки закрепления их первого конца.
| СПОСОБ ИСПЫТАНИЙ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ЛЕДОВОМ ОПЫТОВОМ БАССЕЙНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279654C1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ УПРУГИХ СВЯЗЕЙ ЗАЯКОРЕННЫХ ОБЪЕКТОВ | 0 |
|
SU397414A1 |
| Прямоточный клапан | 1980 |
|
SU1196528A1 |

