Изобретение относится к экспериментальной гидромеханике, в частности к испытаниям в опытовых бассейнах моделей плавучих морских сооружений со сложными пространственными колебаниями под действием поверхностных волн.
Назначение данного комплекса - определение характеристик трехмерных (пространственных) колебаний плавучих объектов под действием поверхностных волн.
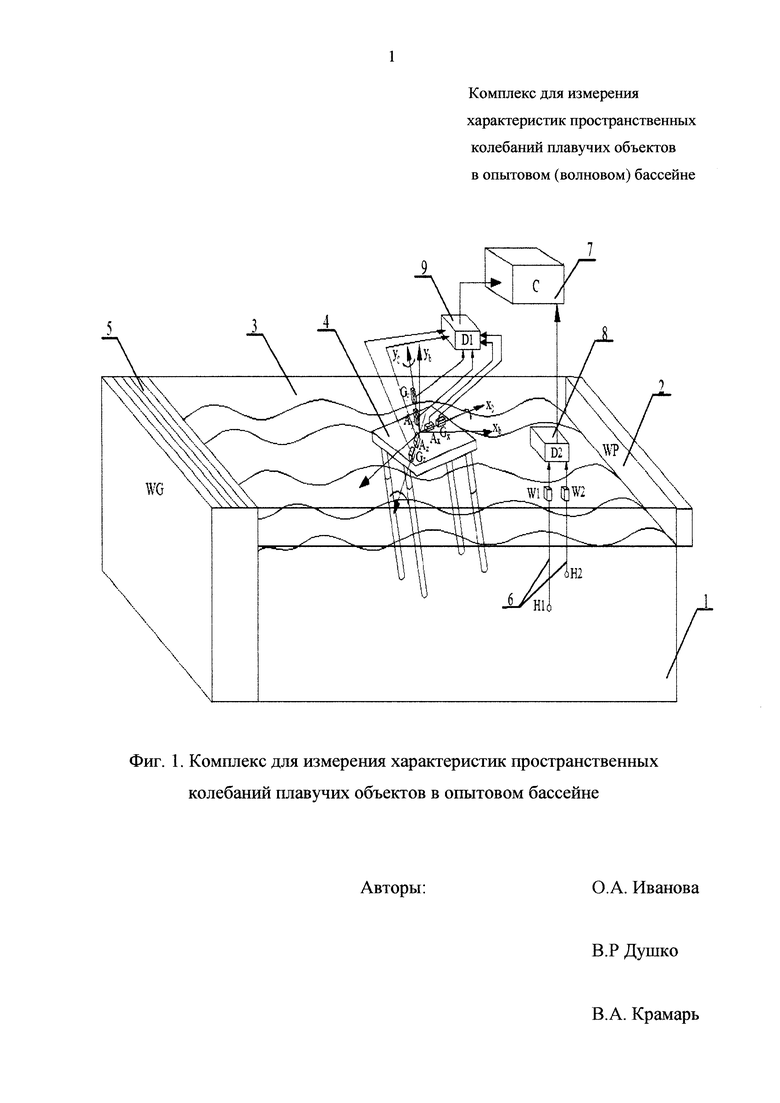
В состав комплекса для измерения характеристик пространственных колебаний плавучих объектов в опытовом (волновом) бассейне входит (Фиг. 1) - Комплекс для измерения характеристик пространственных колебаний плавучих объектов в опытовом (волновом) бассейне:
- волновой бассейн (1), содержащий волнопродуктор (2);
- рабочий участок (3) (куда помещают испытываемую модель (4): судно, платформу, плавучий кран и т.д.), продольную, поперечную и вертикальную оси которого ориентируют произвольным образом вдоль волнового бассейна;
- волногаситель (5);
- измерители пространственно-временных характеристик поверхностных волн в виде двух волнографов (6), измеряющих перепады давления между глубиной установки приемного отверстия первого и второго волнографов и атмосферным давлением;
- компьютер (7), имеющий первый и второй входы;
- блок волнографов (8), ко входу которого подключены выходы волнографов (опрос измерительных каналов и цифровое преобразование). Блок волнографов подключен ко второму входу компьютера;
- блок трехкомпонентных акселерометров и гироскопов (9), измерительные оси которого установлены вдоль осей декартовой правосторонней системы координат, совпадающей с продольной, поперечной и вертикальной осями испытываемой модели, выход этого блока подключен к первому входу компьютера.
Известна бесплатформная инерциальная навигационная система (БИНС), которая взята в качестве аналога, в ее состав входят: блок из трех акселерометров, блок из трех датчиков угловых скоростей, расчетчик вектора состояния объекта и механизмы программного разворота датчиков угловой скорости [см.: Патент Российской Федерации №2011169, G01C 21/00, опубл. 15.04.1994, бюл. №7].
Недостатком такой системы является то, что имея достаточно высокую точность программного разворота датчиков угловой скорости и независимость от влияния масштабного коэффициента, система является полностью не отказоустойчивой. То есть при неудовлетворительной работе одного из датчиков угловых скоростей, или акселерометра вся система будет неработоспособной.
Известна также БЕЗПЛАТФОРМНАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ система (21) u200806978 (22) 20.05.2008 (24) 27.10.2008 (46) 27.10.2008, бюл. №20, 2008, отличающаяся тем, что для повышения надежности системы, обеспечения ее работоспособности, необходимой точности управления и качества переходных процессов при наличии отказов одного из датчиков угловых скоростей или акселерометров, в блок датчиков угловых скоростей введен дополнительный четвертый датчик угловой скорости, который находится в точке пересечения диагоналей корпуса блока датчиков угловых скоростей (куба) на расстоянии 3R, где R - расстояние от центра системы до других датчиков, а также в блок акселерометров дополнительно введен четвертый акселерометр, который находится в точке пересечения диагоналей корпуса блока акселерометров (куба) на расстоянии 3R, где R - расстояние от центра системы до других датчиков.
Недостатками этих технических решений является: 1. Отсутствие информации о возмущающих воздействиях на испытываемую модель, что не позволяет получить полную информацию о ее динамике при различных возмущающих воздействиях. 2. Отсутствие средств обеспечения достоверности и долговременной стабильности измерительных каналов акселерометров и гироскопов при изменениях их градуировочных характеристик при колебаниях температуры, старении и воздействии других дестабилизирующих факторов.
Известен способ проведения испытаний в опытовом бассейне моделей плавучих объектов с протяженными якорными системами удержания и устройство для его осуществления. RU (11)2389996(13) C1 (51) МПК G01M 10/00 (2006/01) B63B 9/02 (2006.01)(12) Патентообладатель(и): Федеральное государственное унитарное предприятие "Центральный научно-исследовательский институт имени академика А.Н. Крылова" (ФГУП "ЦНИИ им. акад. А.Н. Крылова") (RU). В предлагаемом патенте, представлен способ проведения в опытовом бассейне испытаний моделей плавучих объектов с протяженными якорными системами удержания, согласно которому, модель плавучего объекта крепят к основанию бассейна с помощью усеченных якорных связей, каждая из которых содержит гибкую линию с упругим элементом, затем оказывают на модель внешние волновые воздействия и регистрируют параметры эксперимента, отличающийся тем, что крепление испытываемой модели к основанию бассейна осуществляют посредством двухветвенных гибких линий связи, с которыми модель соединяют подвижно через свободно подвешенные к ее корпусу ролики, при этом парным ветвям гибких линий связи придают различную жесткость, а концы ветвей закрепляют на основании бассейна в отстоящих друг от друга точках.
Устройство для проведения в опытовом бассейне испытаний моделей плавучих объектов с протяженными якорными системами удержания, включающее усеченные якорные связи, каждая из которых содержит гибкую линию связи с упругим элементом, с помощью которых испытываемая модель присоединена к основанию бассейна, отличающееся тем, что якорные связи выполнены в виде двухветвенных гибких линий связи, между ветвями которых помещены установленные на модели ролики, которые прикреплены к ее корпусу преимущественно на гибкой связи, при этом вторые ветви гибких линий также оснащены упругим элементом, причем упругие элементы парных ветвей гибких линий связи имеют различную жесткость, а другой конец ветвей указанных гибких линий прикреплен к основанию бассейна в соответствующей точке, отстоящей от точки закрепления их первого конца.
Недостатками выше рассмотренных технических решений являются:
1. Отсутствие данных о параметрах волновых возмущений, которые должны измеряться синхронно с параметрами колебаний испытываемого объекта и усилиями в якорных системах его удержания. При этом если волнопродуктор опытового бассейна генерирует систему волн, то всегда в той или иной форме возникают отраженные и переотраженные волны, которые искажают основное волновое поле. Без учета реальных волновых возмущений невозможно восстановить динамические характеристики испытываемой модели плавучего объекта и системы его удержания.
В предлагаемом изобретении эта проблема решается при помощи двух барометрических волнографов (6) (Фиг. 1) - Комплекс для измерения характеристик пространственных колебаний плавучих объектов в опытовом (волновом) бассейне, приемные концы которых размещены на различной глубине и на различном расстоянии вдоль длины бассейна.
2. В аналоге не указано, каким образом обеспечивается достоверность и долговременная стабильность показаний компонентных акселерометров и гироскопов.
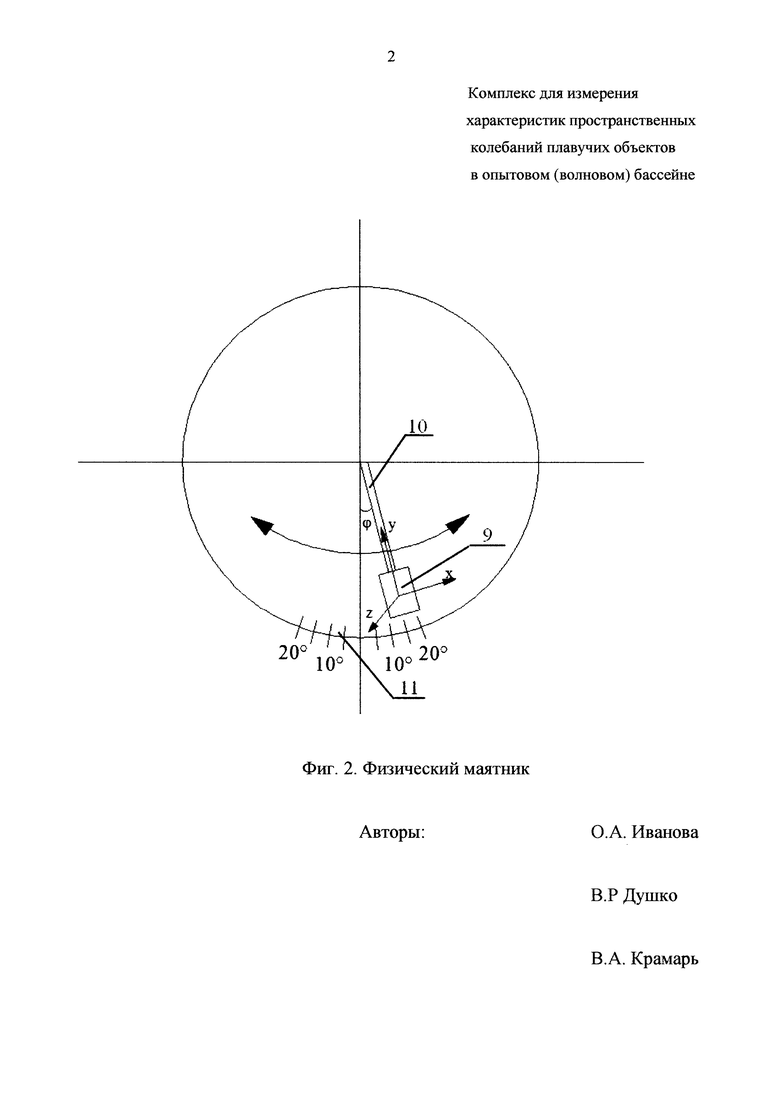
В предлагаемом изобретении, для этой цели в состав комплекса для измерения характеристик пространственных колебаний плавучих объектов в опытовом (волновом) бассейне введен физический маятник (10) (Фиг. 2) - Физический маятник, с возможностью последовательной установки на нем блока трехкомпонентных акселерометров и гироскопов (9) (Фиг. 2) - Физический маятник, таким образом, чтобы каждая из осей блока совпадала с плоскостью движения маятника. Это позволяет проводить регулярные поверки и метрологическую аттестацию указанных измерителей, так как параметры движения маятника хорошо известны и могут использоваться для регулярных поверок, и при необходимости переградуировок измерительных каналов акселерометров и гироскопов.
Работа комплекса осуществляется следующим образом. Волнопродуктор, выполненный в виде пневматической системы или механической пластики возбуждает периодические колебания с периодом Tw (угловой частотой  ). Эти колебания в виде свободных поверхностных прогрессивных волн распространяются вдоль бассейна. При этом их длины λw определяются методом последовательных приближений из дисперсионного соотношения для поверхностных волн
). Эти колебания в виде свободных поверхностных прогрессивных волн распространяются вдоль бассейна. При этом их длины λw определяются методом последовательных приближений из дисперсионного соотношения для поверхностных волн  , где g=9,81 м/с2 - ускорение свободного падения,
, где g=9,81 м/с2 - ускорение свободного падения,  - волновое число, Н - глубина воды в бассейне. Волнографы W1, W2 измеряют перепады давлений между атмосферой и водной средой на глубине установки приемников H1, H2. Амплитуда волны aw вычисляется на основе перепада давлений, регистрируемым каждым волнографом по отношению для гидродинамики поверхности волн:
- волновое число, Н - глубина воды в бассейне. Волнографы W1, W2 измеряют перепады давлений между атмосферой и водной средой на глубине установки приемников H1, H2. Амплитуда волны aw вычисляется на основе перепада давлений, регистрируемым каждым волнографом по отношению для гидродинамики поверхности волн:

где pw - амплитуда колебаний давления, ρ - плотность воды, y - вертикальная координата, отсчитываемая от поверхности в сторону дна с отрицательным знаком. Статическая обработка показаний волнографов позволяет определить частоту волновых возмущений, фазовый сдвиг γ между колебаниями на основной частоте (частоте максимума) и амплитуду волновых колебаний на заданном расстоянии от поверхности дна. По величине сдвига фазы γ между волнографами вдоль длины бассейна определяется фактическая длина волны по соотношению  (Lw - расстояние между волнографами вдоль длины бассейна). Для линейных волн отношение амплитуд pw на каждой глубине установки приемников H1 и Н2 равно:
(Lw - расстояние между волнографами вдоль длины бассейна). Для линейных волн отношение амплитуд pw на каждой глубине установки приемников H1 и Н2 равно:

В случае появления в бассейне многократно отраженных волн это соотношение нарушается, тогда производят вычисление параметров этих отраженных волн по показаниям волнографов, разнесенных на указанные расстояния вдоль бассейна и по глубине. В общем случае происходит частичное отражение волны от волногасителя и в этом случае, как показывает анализ, амплитуда прямой и отраженной волны равны соответственно:

Если Δϕ=0, an=а0=0.5aw, что соответствует полному отражению волны при γ=kwLw, an=aw, a0=0, т.е. отраженная волна отсутствует. Величины aw и γ определяют в результате выполнения спектрального анализа сигналов первого и второго волнографов.
Поверхностные волны, параметры которых определены при помощи системы волнографов, воздействуют на плавучий объект и вызывают его пространственные колебания, т.е. вращательные и поступательные движения относительно продольной oxo, поперечной ozo и условно-вертикальной oyo осей испытываемой модели. Оси блока трехкомпонентных акселерометров и гироскопов устанавливают вдоль указанных осей oxo, oyo, ozo. Рассматривается также некоторая неподвижная (базовая) система отсчета, измерительные оси которой oxb и ozb лежат в плоскости истинного горизонта, а ось oyb направлена вертикально вверх и образует с этой плоскостью угол, равный 90°. В качестве такой системы может быть произвольная фиксированная система отсчета, связанная с горизонтальными осями oxb, ozb и вертикальной осью oyb, например, система координат, связанная с волновым бассейном. Для связи систем координат oxb, ozb, oyb и oxo, ozo, oyo используются углы Эйлера-Крылова. Курсовой угол ϕ (в некоторых случаях его называют углом рыскания) отсчитывается в горизонтальной плоскости между осью oxb и горизонтальной проекцией оси oxo; угол дифферента ψ (тангажа), характеризующий отклонение продольной оси подвижного объекта от горизонтальной плоскости и угол крена θ в, характеризующий отклонение оси ozo от горизонтальной плоскости при вращении объекта относительно продольной оси. Эти углы определяются при помощи трехосевого гироскопа, что обеспечивает пересчет ускорений, измеренных в подвижной системе координат в ускорения в неподвижной (базовой) системе координат и, следовательно, в составляющие пространственных колебаний подвижного объекта.
Проекции единичных векторов системы координат oxo, oyo, ozo на оси базовой (неподвижной) системы координат oxvyvzv равны направляющим косинусам углов между осями oxo, oyo, ozo и oxb, oyb, ozb. Эти направляющие косинусы представлены в виде таблицы 1.
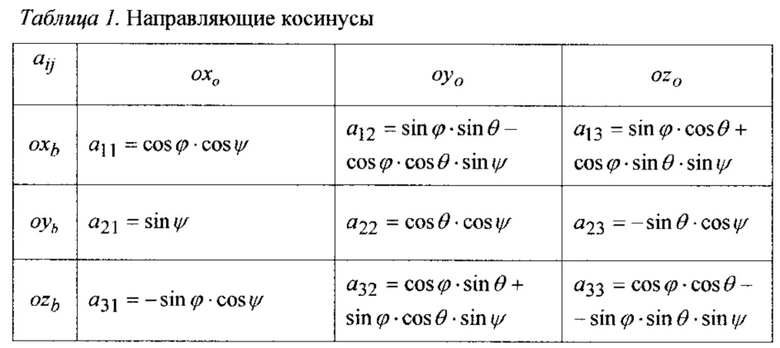
Используя таблицу 1 направляющих косинусов и приближение малых углов (sinα=α, cosα=1), находим:

Так как амплитуды угловых колебаний малы, произведения угловых координат можно исключить, поскольку, например, ϕψ<<θ и т.д. При этом соотношение (4) упрощается:
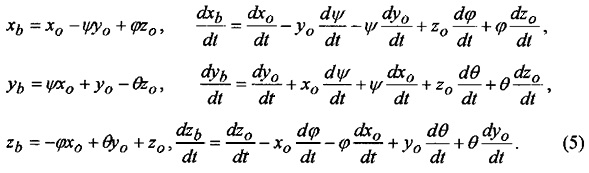
Члены системы уравнений (5) в правой части имеют существенно различающиеся значения. Произведения вида y0(dψ/dt) и ψ(dyo/dt) примерно в десять раз меньше величин dxb/dt для типичных условий проведения измерений в опытовом бассейне, так как для устойчивых поверхностных волн их длина более чем в 10 раз превышает их высоту. Эти произведения также имеют результирующую частоту в два раза превышающую частоту основной гармоники. В связи с этим, в условиях проведения работ в опытовом бассейне и использования приближения малых углов с достаточно высокой точностью можно использовать соотношения:

При определении угловых колебаний испытываемой модели используются результаты непосредственных измерений гироскопов, установленных на каждой измерительной оси. При этом пересчет показаний гироскопов вида  в параметры угловых колебаний выполняется по соотношению:
в параметры угловых колебаний выполняется по соотношению:

Спектральная обработка записей этих колебаний тремя акселерометрами и гироскопами позволяет выделить их основные частоты т (частоты максимумов спектров флуктуации), которые совпадают с частотами волновых возмущений, вызывающих эти колебания.
Таким образом, установка измерительных осей блока трехкомпонентных акселерометров и гироскопов вдоль осей декартовой правосторонней системы координат, совпадающей с продольной, поперечной и условно-вертикальной осями испытываемой модели при подключении выхода этого блока к первому входу компьютера, ко второму входу которого подключен блок волнографов, обеспечивает полноту информации о воздействии волн на испытываемую модель благодаря синхронным измерениям параметров прямой и отраженной волн в системе координат, связанной с бассейном, а также поступательных и вращательных колебаний испытываемой модели, измеренных в этой же системе координат.
С целью обеспечения достоверности данных и долговременной стабильности метрологических характеристик трехкомпонентных акселерометров и гироскопов в состав комплекса (см. выше) дополнительно введен физический маятник (10) (Фиг. 2) - Физический маятник, с возможностью последовательной установки на нем блока трехкомпонентных акселерометров и гироскопов (9) (Фиг. 2) - Физический маятник, таким образом, чтобы каждая из осей блока совпадала с плоскостью движения маятника, т.е., чтобы любая из его осей oxo, oyo, ozo совпадала с плоскостью колебаний маятника, который выполнен в виде окружности с нанесенной градусной шкалой (11) (Фиг. 2) - Физический маятник. Это позволяет проводить регулярные поверки и метрологическую аттестацию указанных измерителей, так как параметры движения маятника хорошо известны и могут использоваться для регулярных поверок, и при необходимости переградуировок измерительных каналов акселерометров и гироскопов.
Изобретение дает возможность определять характеристики трехмерных (пространственных) колебаний плавучих объектов под действием поверхностных волн.
Данное изобретение может использоваться для отработки методики и проведения испытаний в опытовых бассейнах моделей плавучих морских установок, сооружений со сложными - пространственными колебаниями под действием поверхностных волн.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для определения характеристик качки свободной модели судна | 1983 |
|
SU1090611A1 |
| СПОСОБ ПРОВЕДЕНИЯ В ОПЫТОВОМ БАССЕЙНЕ ИСПЫТАНИЙ МОДЕЛЕЙ ПЛАВУЧИХ ОБЪЕКТОВ С ПРОТЯЖЕННЫМИ ЯКОРНЫМИ СИСТЕМАМИ УДЕРЖАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389996C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБСЛЕДОВАНИЯ ОБЪЕКТОВ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ | 2012 |
|
RU2495375C1 |
| Устройство для определения направления распространения двумерных поверхностных волн | 1982 |
|
SU1066883A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| СПОСОБ ИСПЫТАНИЙ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ЛЕДОВОМ ОПЫТОВОМ БАССЕЙНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279654C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК МОДЕЛЕЙ ПЛАВУЧИХ ИНЖЕНЕРНЫХ ОБЪЕКТОВ, ОБОРУДОВАННЫХ ЯКОРНОЙ СИСТЕМОЙ УДЕРЖАНИЯ, И СПОСОБ ИХ ОПРЕДЕЛЕНИЯ | 2012 |
|
RU2509998C2 |
| СПОСОБ И УСТРОЙСТВО ПОСТРОЕНИЯ НЕВОЗМУЩАЕМОЙ БЕЗГИРОСКОПНОЙ ВЕРТИКАЛИ | 2002 |
|
RU2258907C2 |
Изобретение относится к экспериментальной гидромеханике, к испытаниям в опытовых бассейнах моделей плавучих инженерных сооружений со сложными пространственными колебаниями под действием поверхностных волн. Сущность изобретения заключается в том, что комплекс для измерения характеристик пространственных колебаний плавучих объектов в опытовом (волновом) бассейне содержит блок трехкомпонентных акселерометров и гироскопов, при этом измерительные оси блока трехкомпонентных акселерометров и гироскопов установлены вдоль осей декартовой правосторонней системы координат, совпадающей с продольной, поперечной и вертикальной осями испытываемой модели, а выходы блока трехкомпонентных акселерометров и гироскопов подключены к первому входу компьютера, ко второму входу которого подключен блок волнографов, причем в состав комплекса дополнительно введен физический маятник с возможностью последовательной установки на нем блока трехкомпонентных акселерометров и гироскопов таким образом, чтобы каждая из осей блока совпадала с плоскостью движения маятника. Технический результат – получение достоверных данных и долговременной стабильности метрологических характеристик трехкомпонентных акселерометров и гироскопов. 1 табл., 2 ил.
Комплекс для измерения характеристик пространственных колебаний плавучих объектов в опытовом (волновом) бассейне, в состав которого входит волновой бассейн, содержащий волнопродуктор, рабочий участок, куда помещают испытываемую модель, продольную, поперечную и вертикальную оси которого ориентируют произвольным образом вдоль волнового бассейна, волногаситель; измерители пространственно-временных характеристик поверхностных волн в виде двух волнографов, измеряющих перепады давления между глубиной установки приемного отверстия первого и второго волнографов и атмосферным давлением, блок волнографов, компьютер, имеющий первый и второй входы, блок трехкомпонентных акселерометров и гироскопов, отличающийся тем, что с целью обеспечения полноты информации о воздействии волн на испытываемую модель и о ее реакции на эти воздействия измерительные оси блока трехкомпонентных акселерометров и гироскопов установлены вдоль осей декартовой правосторонней системы координат, совпадающей с продольной, поперечной и вертикальной осями испытываемой модели, а выходы блока трехкомпонентных акселерометров и гироскопов подключены к первому входу компьютера, ко второму входу которого подключен блок волнографов, причем для обеспечения достоверности данных и долговременной стабильности метрологических характеристик трехкомпонентных акселерометров и гироскопов в состав комплекса дополнительно введен физический маятник с возможностью последовательной установки на нем блока трехкомпонентных акселерометров и гироскопов таким образом, чтобы каждая из осей блока совпадала с плоскостью движения маятника.
| СПОСОБ ПРОВЕДЕНИЯ В ОПЫТОВОМ БАССЕЙНЕ ИСПЫТАНИЙ МОДЕЛЕЙ ПЛАВУЧИХ ОБЪЕКТОВ С ПРОТЯЖЕННЫМИ ЯКОРНЫМИ СИСТЕМАМИ УДЕРЖАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389996C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 0 |
|
SU338908A1 |
| Установка для определения характеристик качки свободной модели судна | 1983 |
|
SU1090611A1 |
| US 7756689 B1, 13.07.2010. | |||

