Изобретение относится к военной технике, а более конкретно к способам наведения управляемых ракет, в частности, устанавливаемых в составе комплексов управляемого ракетного вооружения как на наземных установках, так и на различных объектах, таких, например, как танки, боевые машины пехоты, самоходные пусковые установки, вертолеты и др.
Наведение снарядов и управляемых ракет в процессе их полета позволяет существенно повысить точность комплексов вооружения, существенно повысить огневую мощь таких комплексов, а следовательно, и их эффективность.
В настоящее время известны различные способы наведения управляемых ракет и снарядов. От эффективности способа наведения зависит и эффективность комплекса вооружения боевой машины в целом.
Известен способ наведения управляемых ракет первого поколения, заключающийся в наведении наводчиком (оператором) на цель линии прицеливания, глазомерном измерении отклонения от нее управляемой ракеты, воздействии на органы управления ракетой в соответствии с этими отклонениями до совмещения управляемой ракеты с целью (см., например, А.Н.Латухин «Противотанковое вооружение», М., Воениздат, 1974, С.192-236). К первому поколению относятся управляемые (противотанковые) ракеты с ручными системами наведения: французские SS-10, SS-11, SS-12, «Энтак», английские «Виджилент», «Малкара», западногерманская «Кобра», шведская «Бантам», швейцарская «Москито-64», отечественные «Шмель», «Фаланга», «Малютка» и др.
ПТУР первого поколения и способы их наведения имеют очевидные недостатки: невысокая скорость движения ракеты, а следовательно, и очень большое время полета (20-25 с), наличие не поражаемой зоны перед огневой позицией глубиной 300-600 м, малая скорострельность по сравнению с другими противотанковыми средствами и др. Обучение личного состава правилам стрельбы и практическим навыкам очень дорого и сложно, так как ручное управление требует строгого отбора и тщательного обучения операторов. Низкая скорость полета ракеты требует от оператора непрерывного визуального слежения за ракетой и целью и управления ракетой на всей траектории, при таком способе управления практически невозможно устранить один из основных недостатков: низкую скорость полета управляемой ракеты. Дело в том, что при увеличении скорости полета ракеты работа наводчика сильно усложняется, поскольку управление обычно осуществляется с помощью команд, основанных на учете взаимного положения ракеты и цели. Наводчик физически не успевает своевременно реагировать на изменения направления полета скоростной ракеты. Он также испытывает значительные трудности при выводе ракеты на линию прицеливания. Во избежание клевка ракеты о землю вблизи пусковой установки (стреляющего объекта) последней придают значительный угол возвышения. В результате чего и образуется (см. выше) необстреливаемая зона, размеры в 600-700 м.
Известен способ наведения управляемой ракеты комплекса управляемого ракетного вооружения 9К112-1 «Кобра» (см., например, «Комплекс вооружения танка - Т-64Б. Материалы учебного пособия, М., ВАБТВ, 1977, С.8-51).
Способ наведения управляемой ракеты комплекса 9К112-1 «Кобра» заключается в формировании линии прицеливания и совмещении ее с целью, измерении системой наведения отклонения управляемой ракеты в процессе ее полета от линии прицеливания, автоматическом формировании и передаче на ракету команды управления, соответствующей этому отклонению, автоматической выработке и подаче на органы управления ракетой сигнала, соответствующего этой команде.
Этот способ от предшествующего отличается тем, что непрерывное слежение за целью, совмещая с нею линию прицеливания, ведет наводчик (оператор), а слежение за ракетой, измерение ее отклонений от линии прицеливания, выработка и передача команд на борт летящей ракеты, а затем на ее органы управления производятся системой наведения автоматически. Этот способ по сравнению с предшествующим обеспечивает (см. там же):
увеличение скорости полета ракеты до 220-500 м/с;
уменьшение времени полета ракеты на предельную дальность;
уменьшение «мертвой зоны» до 75 м и менее от огневой позиции;
более высокую эффективность и стабильность результатов стрельбы в разнообразных ситуациях противотанкового боя;
упрощение работы оператора (его функции сводятся лишь к совмещению линии прицеливания с целью, а команды управления вырабатываются и передаются на ракету автоматически), что повышает точность стрельбы и сводит к минимуму влияние на ее результаты индивидуальных данных оператора;
облегчение отбора операторов, упрощение процесса и уменьшение стоимости обучения.
Однако этому способу также свойственны недостатки. Необходимость продолжительного по времени удержания линии прицеливания на цели приводит к возникновению опасности ее потери при появлении в поле зрения наводчика световых или пыледымовых помех. Наличие на борту ракеты мощного источника света, необходимого для образования световой обратной связи и замкнутого контура управления, затрудняет наводчику слежение за целью, создавая ему световую помеху. Если же передача команд управления на борт ракеты происходит по радиоканалу, то со стороны противника возможно противодействие путем применения по стреляющему комплексу противорадиолокационных управляемых ракет.
Известен также способ наведения управляемой ракеты по патенту Российской Федерации №2240486 с приоритетом от 13.11.2003 г. Этот способ по технической сути и существенным признакам является наиболее близким к заявляемому и принят за его прототип. Одновременно он является и базовым объектом предлагаемого способа. Способ наведения управляемой ракеты на цель по патенту №2240486 заключается в формировании линии прицеливания и совмещении ее с целью, измерении системой наведения отклонения управляемой ракеты от линии прицеливания в процессе ее полета, автоматическом формировании и передаче на ракету команды управления, соответствующей этому отклонению, автоматической выработке и подаче на органы управления ракетой сигнала, соответствующего этой команде, формировании и совмещении с целью второй линии прицеливания, измерении отклонения ракеты от второй линии прицеливания, формировании в соответствии с ее отклонением от второй линии прицеливания второй команды управления и выработке сигнала на органы управления ракетой в соответствии с суммой первой и второй команд управления, при этом вторую линию прицеливания формируют под острым углом к первой, измеряют угловые скорости линий прицеливания, формируют поправки на угловые скорости линий прицеливания, определяют большую из них по модулю и суммируют ее с сигналом, подаваемым на органы управления ракетой.
В этом способе достигнут качественно новый результат (увеличение коэффициента усиления) без изменения характеристик систем, что при удовлетворительной устойчивости объединенной системы обеспечивает повышение ее и точности, и быстродействия. Кроме того, совместное наведение управляемой ракеты двумя системами наведения позволяет повысить надежность ее захвата и наведения в случае выхода из строя одной из систем, а также повысить помехоустойчивость системы, так как при потере управления одной системой из-за световых или пыледымовых помех, наведение продолжает вторая. Повышается также и защищенность обоих стреляющих комплексов от противорадиолокационных ракет противника, так как ГСН ракеты противника, суммируя сигналы о местоположении стреляющих комплексов, расположенных на определенном удалении друг от друга, приводит к промаху (ракета противника проходит, как правило, между стреляющими объектами). Компенсация динамических ошибок наведения, вызываемых угловыми скоростями, обеспечивает уменьшение суммарной ошибки наведения линий прицеливания.
Однако и этому способу свойственны недостатки. При стрельбе по маневрирующей цели с подвижных платформ как в первой, так и во второй системах наведения появляются ошибки наведения (динамические ошибки, см. например, Неупокоев Ф.К. Стрельба зенитными ракетами. М.: Воениздат, 1970 гг., с.190-204), которые при больших скоростях цели могут привести к промаху. Выходом из положения в обычных ситуациях (при одной системе наведения) может быть измерение угловой скорости движения линии прицеливания и корректирование в соответствии с этой скоростью команды управления. Однако в прототипе такая корректировка не приводит к полному устранению ошибок наведения. Более того, суммирование команд управления приводит к суммированию и компенсирующих поправок на ошибки наведения, что в ряде случаев не только не дает возможности их полной компенсации, но и может привести к их увеличению (в случаях перекомпенсации). Кроме того, возникают и некомпенсируемые поперечные линейные скорости линий прицеливания, что приводит к появлению соответствующих дополнительных ошибок и снижению эффективности стрельбы.
Целью настоящего изобретения является повышение эффективности наведения управляемой ракеты и эффективности стрельбы.
Указанная цель достигается тем, что в способе наведения управляемой ракеты на цель, заключающемся в формировании линии прицеливания и совмещении ее с целью, измерении системой наведения отклонения управляемой ракеты от линии прицеливания в процессе ее полета, автоматическом формировании и передаче на ракету команды управления, соответствующей этому отклонению, автоматической выработке и подаче на органы управления ракетой сигнала, соответствующего этой команде, формировании и совмещении с целью второй линии прицеливания, образующей с первой прицельной линией острый угол, измерении отклонения ракеты от второй линии прицеливания, формировании в соответствии с ее отклонением от второй линии прицеливания второй команды управления и выработке сигнала на органы управления ракетой в соответствии с суммой первой и второй команд управления, измеряют угловые скорости линий прицеливания, формируют поправки на угловые скорости линий прицеливания, определяют большую из них по модулю и суммируют ее с сигналом, подаваемым на органы управления ракетой, дополнительно измеряют направление и величину линейных поперечных скоростей каждой линии прицеливания, начальные дальности до цели вдоль каждой из них и их изменение от момента их ввода до достижения управляемой ракетой цели, определяют текущие дальности и корректируют значение угловых скоростей линий прицеливания путем ввода поправок в соответствии с выражениями
ω1к=ω1o±Δω1=ω1o±К1пV1лп/(Д1о±ΔД1),
ω2к=ω2о±Δω2=ω2о±К2пV2лп/(Д2о±ΔД2),
где ω1к и ω2к - скорректированные угловые скорости соответственно первой и второй линий прицеливания (рад/с),
ω1о и ω2о - начальные угловые скорости первой и второй линий прицеливания (рад/с),
Δω1 и Δω2 - компенсирующие поправки угловых скоростей первой и второй линий прицеливания на линейную поперечную скорость каждой из них (рад/с),
К1п и К2п - коэффициенты пропорциональности угловых скоростей для первой и второй линий прицеливания (безразмерные),
V1лп и V2лп - линейные поперечные скорости первой и второй линий прицеливания (м/с),
Д1о и Д2о - начальные дальности до цели, измеренные вдоль первой и второй линий прицеливания (м),
ΔД1 и ΔД2 - изменения дальности до цели, измеряемые вдоль первой и второй линий прицеливания (м), суммируемые с Д1о и Д2о при удалении цели и вычитаемые - при приближении,
при этом, если направления угловой и линейной поперечной скоростей для одной и той же линии прицеливания совпадают, то значение соответствующей для нее поправки суммируется со значением ее угловой скорости, в противном случае - вычитается.
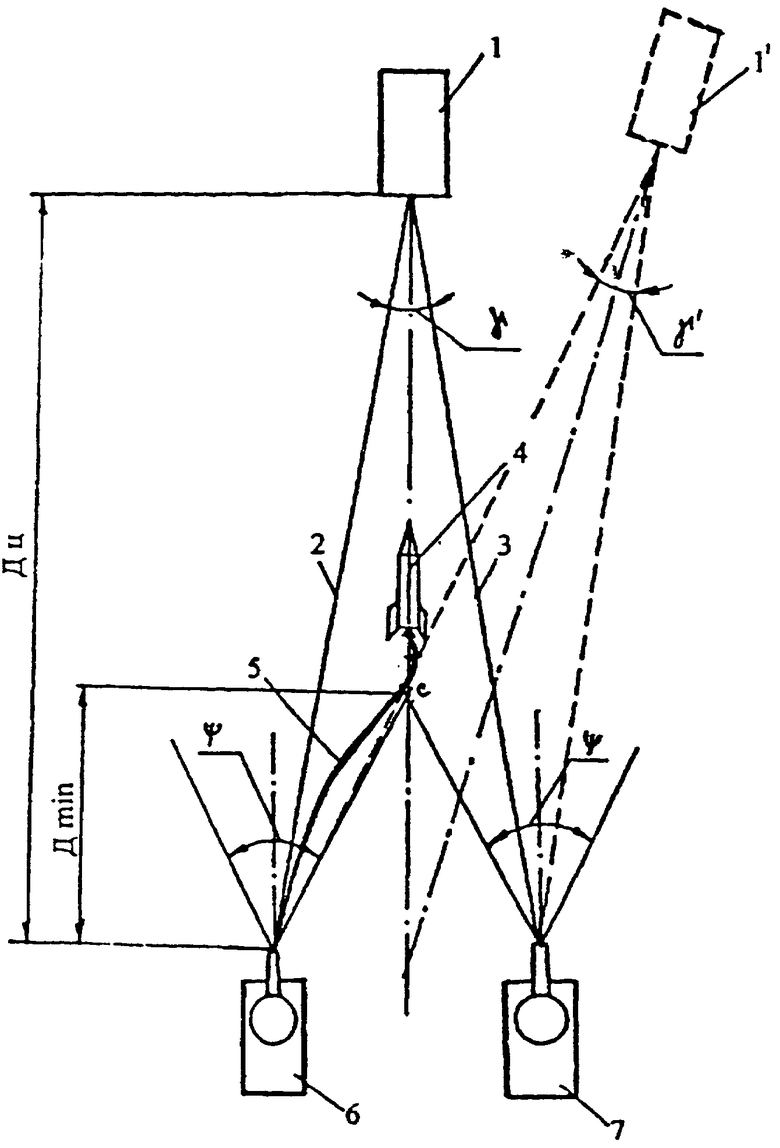
Изобретение поясняется чертежом, на котором показаны принцип формирования двух линий прицеливания, траектория полета управляемой ракеты и приняты следующие обозначения:
1,1' - цель (Ц), 2 - первая линия прицеливания (ЛП1), 3 - вторая линия прицеливания (ЛП2), 4 - управляемая ракета (УР), 5 - траектория управляемой ракеты, 6 - первый стреляющий объект, 7 - второй стреляющий объект, γ и γ´ - острый угол между первой и второй линиями прицеливания, Дmin - минимальная дальность начала совместного наведения управляемой ракеты, Дц - дальность до цели, Ψ - угол расходимости поля (луча) управления системы наведения управляемой ракеты.
Реализация (работа) предлагаемого способа происходит следующим образом. При стрельбе по неподвижной цели оба стреляющих объекта устанавливаются (располагаются при их движении) таким образом относительно цели и друг относительно друга, чтобы в соответствии с их техническими характеристиками при одновременном визировании цели и запуске управляемой ракеты одним из них был возможен захват управляемой ракеты и ее дальнейшее наведение вторым комплексом. Например, для комплексов, реализующих прототип, расстояние между объектами должно быть не более 50 м (при стрельбе на максимальную дальность - 4000 м). Получив команду на поражение цели (при подготовленной к работе аппаратуре комплексов вооружения), наводчики стреляющих объектов совмещают линии прицеливания своих прицелов с целью 1 (см. чертеж) и один из них производит запуск управляемой ракеты. Допустим, что запуск произведен с первого стреляющего объекта 6. После запуска управляемой ракеты 4 по неподвижной цели системы наведения обоих стреляющих комплексов 6 и 7 производят ее захват. Информация об отклонении управляемой ракеты от первой линии прицеливания 2 воспринимается и измеряется системой наведения первого стреляющего объекта 6, а информация об отклонении управляемой ракеты от второй линии прицеливания 3 воспринимается и измеряется системой наведения второго стреляющего объекта 7. В соответствии с измеренными отклонениями станции наведения обоих комплексов формируют команды управления K1 и К2 и по линии связи передают их на управляемую ракету 4, где они суммируются (с учетом знака) и передаются на органы управления ракеты. Сигнал управления в этом случае будет определяться, как и в прототипе, выражением:
Иу=К(К1+К2), где Иу - сигнал управления, подаваемый на органы управления ракеты, К - передаточный коэффициент, K1 - команда управления, формируемая системой наведения первого стреляющего объекта 6, К2 - команда управления, формируемая системой наведения второго стреляющего объекта 7. В результате такого формирования сигнала управления ракета в процессе полета будет находиться между линиями прицеливания, и, если характеристики систем наведения будут идентичными, то на равном удалении от каждой из линий прицеливания.
Согласование совместной работы систем наведения обоих стреляющих объектов происходит (при необходимости) с помощью согласующего устройства, обеспечивающего при подаче команды на запуск одной из ракеты подачу соответствующей команды на систему наведения второго стреляющего объекта 7, переводящей ее в режим управления ракетой (без ее пуска), слежения за нею и ее наведения на цель. При появлении трудностей в одновременной передаче команд управления с двух стреляющих объектов на одну и ту же ракету (например, если канал передачи команд выполнен на основе радиоканала) синхронизирующее устройство обеспечивает поочередную передачу команд для предотвращения взаимных помех.
Динамика процесса управления при движении управляемой ракеты между первой и второй линиями прицеливания (в треугольнике, образованном целью 1 и стреляющими объектами 6, 7) определяется (как и в прототипе) разностью команд управления, а при движении вне треугольника - их суммой. Это обеспечивает увеличение коэффициента усиления объединенной системы наведения при неизменных характеристиках каждой из самостоятельных систем наведения. Если управление происходит на линейных участках каждой из идентичных по характеристикам систем наведения, то коэффициент усиления удваивается. Введение поправок на угловые и поперечные линейные скорости линий прицеливания его величину практически не изменяют. Благодаря этому достигается качественно новый результат (увеличение коэффициента усиления) без изменения характеристик систем, что при удовлетворительной устойчивости объединенной системы и введении поправок на угловые скорости перемещений линий прицеливания обеспечивает повышение и точности, и быстродействия.
При стрельбе по маневрирующей цели возрастают ошибки наведения, значение которых определяется угловой скоростью цели, астатизмом, конструктивными и техническими особенностями систем наведения. Для их компенсации измеряются угловые скорости линий прицеливания и формируются соответствующие поправки, которые как и команды управления передаются на управляемую ракету. Сравнивая поправки от обеих систем наведения, определяют большую из них по модулю и суммируют ее с сигналом, подаваемым на органы управления ракетой. Например, если поправка на угловую скорость перемещения первой линии прицеливания больше, чем второй, то величина именно этой поправки суммируется с сигналом, подаваемым на органы управления ракетой. При равных поправках с сигналом управления суммируется одна из них. Знак поправки определяется направлением перемещения соответствующей линии прицеливания. Такие действия объясняются следующим. Исследованиями установлено, что попытки простого суммирования поправок проблему не решают, а усложнение математического аппарата ведет к соответствующему усложнению конструктивной реализации поправок и появлению дополнительных помех. Вместе с тем оказалось, что компенсация только большей ошибки существенно снижает суммарную ошибку наведения, не усложняет конструкцию (особенно, если сравнение и определение большей по модулю поправки производятся с помощью синхронизирующего устройства) и в большинстве ситуаций является приемлемым.
При появлении поперечных (боковых) линейных скоростей одной или обеих линий прицеливания дополнительно измеряют их направление и величину, начальные дальности до цели вдоль каждой из них и их изменение от момента их ввода до достижения управляемой ракетой цели, определяют текущие дальности и корректируют значение угловых скоростей линий прицеливания путем ввода поправок в соответствии с выражениями
ω1к=ω1o±Δω1=ω1o±К1пV1лп/(Д1о±ΔД1),
ω2к=ω2о±Δω2=ω2о±К2пV2лп/(Д2о±ΔД2),
где ω1к и ω2к - скорректированные угловые скорости соответственно первой и второй линий прицеливания (рад/с),
ω1o и ω2o - начальные угловые скорости первой и второй линий прицеливания (рад/с),
Δω1 и Δω2 - компенсирующие поправки угловых скоростей первой и второй линий прицеливания на линейную поперечную скорость каждой из них (рад/с),
К1п и К2п - коэффициенты пропорциональности угловых скоростей для первой и второй линий прицеливания (безразмерные),
V1лп и V2лп - линейные поперечные скорости первой и второй линий прицеливания (м/с),
Д1о и Д2о - начальные дальности до цели, измеренные вдоль первой и второй линий прицеливания (м),
ΔД1 и ΔД2 - изменения дальности до цели, измеряемые вдоль первой и второй линий прицеливания (м), суммируемые с Д1о и Д2о при удалении цели и вычитаемые - при приближении, при этом, если направления угловой и линейной поперечной скоростей для одной и той же линии прицеливания совпадают, то значение соответствующей для нее поправки суммируется со значением ее угловой скорости, в противном случае - вычитается.
Использование предлагаемого способа наведения управляемой ракеты позволяет не только сохранить результаты прототипа, но и получить ряд других положительных результатов. Совместное наведение управляемой ракеты двумя системами наведения повышает надежность захвата и наведения ракеты в случае выхода из строя одной из систем, а также повышает помехоустойчивость системы, так как при потере управления одной системой из-за световых или пыледымовых помех, наведение продолжает вторая. Кроме того, повышается защищенность обоих стреляющих комплексов от противорадиолокационных ракет противника, так как ГСН ракеты противника, суммируя сигналы о местоположении стреляющих комплексов, расположенных на определенном удалении друг от друга, приводит к промаху (ракета противника проходит, как правило, между стреляющими объектами (6 и 7)). При стрельбе по маневрирующей цели с подвижных платформ точностные характеристики систем наведения, благодаря компенсации ошибок наведения, вызванных линейными поперечными скоростями линий прицеливания, повышаются на (8-10)%.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2240486C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2012 |
|
RU2481541C1 |
| СПОСОБ УПРАВЛЕНИЯ СТРЕЛЬБОЙ ИЗ ПУШКИ УПРАВЛЯЕМЫМ СНАРЯДОМ | 2007 |
|
RU2343392C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2301392C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2192603C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2213318C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2436031C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2007 |
|
RU2334936C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2010 |
|
RU2439462C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2436030C1 |
Изобретение относится к способам наведения управляемых ракет. Способ включает формирование двух линий прицеливания и совмещение их с целью, измерение отклонения управляемой ракеты от них в процессе ее полета, формирование и передачу на ракету команд, подачу на органы управления ракетой сигналов, соответствующих этим командам, выработку сигналов на органы управления ракетой в соответствии с суммой первой и второй команд управления. Вторую линию прицеливания формируют под острым углом к первой, измеряют угловые скорости перемещения линий прицеливания, формируют поправки на них, определяют большую из них по модулю и суммируют ее с сигналом, подаваемым на органы управления ракетой. Дополнительно измеряют направление и величину линейных поперечных скоростей перемещения каждой линии прицеливания, начальные дальности до цели вдоль каждой из них и их изменение от момента ввода до достижения управляемой ракетой цели. Определяют текущие дальности до цели и корректируют значение угловых скоростей перемещения линий прицеливания путем ввода поправок, определенных с учетом значений линейных поперечных скоростей перемещения. Обеспечивается уменьшение погрешности стабилизации линии прицеливания и повышение эффективности стрельбы в условиях действия помех. 1 ил.
Способ наведения управляемой ракеты на цель, включающий формирование линии прицеливания и совмещение ее с целью, измерение системой наведения отклонения управляемой ракеты от линии прицеливания в процессе ее полета, автоматическое формирование и передачу на ракету команды управления, соответствующей этому отклонению, автоматическую выработку и подачу на органы управления ракетой сигнала, соответствующего этой команде, формирование и совмещение с целью второй линии прицеливания, измерение отклонения ракеты от второй линии прицеливания, формирование в соответствии с ее отклонением от второй линии прицеливания второй команды управления и выработку сигнала на органы управления ракетой в соответствии с суммой первой и второй команд управления, при этом вторую линию прицеливания формируют под острым углом к первой, измеряют угловые скорости перемещения линий прицеливания, формируют поправки на угловые скорости перемещения линий прицеливания, определяют большую из них по модулю и суммируют ее с сигналом, подаваемым на органы управления ракетой, отличающийся тем, что дополнительно измеряют направление и величину линейных поперечных скоростей перемещения каждой линии прицеливания, начальные дальности до цели вдоль каждой из них и их изменение от момента ввода до достижения управляемой ракетой цели, определяют текущие дальности до цели и корректируют значение угловых скоростей перемещения линий прицеливания путем ввода поправок в соответствии с выражениями
ω1к=ω1о±Δω1=ω1o±K1пV1лп/(Д1o±ΔД1),
ω2к=ω2о±Δω2=ω2o±K2пV2лп/(Д2o±ΔД2),
где ω1к и ω2к - скорректированные угловые скорости перемещения, соответственно, первой и второй линий прицеливания (рад/с);
ω1o и ω2о - начальные угловые скорости перемещения, соответственно, первой и второй линий прицеливания (рад/с);
Δω1 и Δω2 - компенсирующие поправки угловых скоростей перемещения первой и второй линий прицеливания на линейную поперечную скорость перемещения каждой из них (рад/с);
K1п и K2п - коэффициенты пропорциональности угловых скоростей перемещения для первой и второй линий прицеливания (безразмерные);
V1лп и V2лп - линейные поперечные скорости перемещения первой и второй линий прицеливания (м/с);
Д1о и Д2о - начальные дальности до цели, измеренные вдоль первой и второй линий прицеливания (м);
ΔД1 и ΔД2 - изменения дальности до цели, измеряемые вдоль первой и второй линий прицеливания (м), суммируемые с Д1о и Д2о при удалении цели и вычитаемые из них - при приближении,
при этом, если направления угловой и линейной поперечной скоростей для одной и той же линии прицеливания совпадают, то значение соответствующей для нее поправки суммируется со значением ее угловой скорости, в противном случае - вычитается.
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2240486C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2192603C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2004 |
|
RU2269085C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2290591C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2294512C1 |

