Изобретение относится к способу и устройству для выявления места импульсного механического воздействия на элемент оборудования.
В большинстве случаев практического применения требуется постоянно следить за надлежащим режимом работы элементов оборудования, например трубопровода или емкости в химическом производстве или силовой машины для превращения энергии потока в механическую, с целью своевременного выявления неисправностей и предупреждения аварий с тяжелым исходом. Для осуществления такого контроля в уровне техники известно множество способов.
Так, например, в ЕР 0765466 В1 предложено проводить контроль за вибрацией турбинных лопаток с помощью микроволн, направляемых на эти лопатки. На основе модуляции отраженных от турбинных лопаток микроволн можно сделать вывод о вибрации турбины.
Посредством известного из DE 19857552 А1 способа разрушение вала турбины регистрируется путем измерения частоты вращения концов вала.
В DE 19843615 С2 предложено проводить диагностику состояния двигателя внутреннего сгорания посредством анализа частотного спектра измерительных сигналов, принимаемых звукоприемником, расположенным на участке впуска воздуха или отработавшего газа.
В DE 19727114 С2 при контроле за состоянием машины вместо воздушного звука регистрируются сигналы ее механического шума. Также и при этом известном способе анализируются полученные частотные спектры измерительных сигналов, регистрируемых датчиком механического шума.
Также и в способе, раскрытом в DE 19545008 С2, анализируется при работе машины частотный спектр измерительного сигнала, регистрируемого контрольным датчиком, например датчиком ускорения, и сравнивается с эталонным частотным спектром.
Анализ частотного спектра зарегистрированных сигналов механического шума. турбины проводится и в способе, известном из US 6301572 В1. Для этого анализируются трансформанты Фурье измерительного сигнала в нейрональной сети по правилам нечеткой логики с целью получения при этом данных о состоянии турбины.
Особую проблему создают приносимые потоком и ударяющиеся об элемент оборудования свободные предметы, оказывающие лишь кратковременное импульсное воздействие, надежное подтверждение которого является проблематичным.
В GB 2288235 предложено регистрировать появление свободных, приносимых потоком предметов посредством колебаний, возникающих при соударении этих частей с элементом оборудования. Для этого на элементе оборудования размещают звукоприемник и образуемые им измерительные сигналы подают в обучающуюся нейтрональную сеть, которая на основе возникающих образцов решает, насколько нормальным является фоновый шум.
Проблемы, вызываемые появлением посторонних предметов в потоке среды, могут возникать, например, в газовых турбинах, камера сгорания которых в целях защиты от перегрева футерована керамическими плитками. Эти керамические плитки подвержены большим динамическим нагрузкам вследствие переменных колебаний давления в камере сгорания. При этом может случиться, что на соответствующих держателях произойдет выкрашивание плиток, образовавшиеся куски будут захвачены потоком отработавшего газа и произойдет их соударение с первым рядом направляющих лопаток. Это может привести к повреждению покрытия направляющих лопаток и их разрушению. Кроме того, при этом присутствует опасность того, что плитка, которая уже повреждена вследствие выкрашивания ее части, полностью отделится от держателя и вызовет соответственно серьезное повреждение газовой турбины. В этом случае удар небольших свободных предметов или цельной плитки вызывает индикацию полного предстоящего отрыва плитки или нескольких плиток, в результате чего своевременное отключение газовой турбины и своевременная замена поврежденных плиток предупредит причинение серьезного повреждения.
Для обнаружения попадания посторонних предметов в газовую турбину согласно US 4,888,948 на входе в турбину установлен датчик, регистрирующий электрический заряд, индуктируемый посторонними предметами.
Для контроля за указанными ударами об элемент оборудования из WO 01/75272 А2 в принципе известна регистрация удара посредством соответствующих датчиков с использованием, подобно известному из GB 2288235 способу, возникающего при этом механического шума. Однако в таком случае, в частности, в газовых турбинах, возникает проблема, связанная с тем, что обычные рабочие шумы настолько велики, что доля сигнала в датчике, вызванного ударом всей плитки о направляющую лопатку газовой турбины, является меньше фона, образуемого нормальными рабочими шумами, вследствие чего, в частности, удар предметов меньшего размера не может обнаруживаться только посредством контроля за амплитудами сигналов механического шума. Поэтому для увеличения отношения «сигнал/шум» в этом источнике информации предложено подвергать измерительный сигнал, воспринятый датчиком измеряемых величин, полосовой фильтрации или же фильтрации верхних частот с тем, чтобы таким способом исключить образующиеся при нормальной работе турбины сигналы механического шума. Однако эти меры оказываются недостаточными для уверенного распознавания импульсного события при больших, варьирующихся во времени фоновых шумах.
Из WO 03/071243 А1 известен способ выявления импульсного механического воздействия на элемент оборудования, при котором зарегистрированный сигнал механического шума подвергается окончатому преобразованию Фурье. На основе большого числа полученных таким способом спектров Фурье выводят посредством подробно поясняемых в этом источнике информации оценочную функцию К, указывающую на импульсное механическое воздействие на элемент оборудования. Приведенный в этом источнике алгоритм для вывода оценочной функции К обеспечивает точное распознавание компонента сигнала, наложенного на заглушаемый измерительный сигнал и обусловленный импульсным воздействием.
В частности, для элементов оборудования, имеющих большой объем и большое количество встроенных в них компонентов, наряду с информацией о несоответствующем нормальному рабочему шуму импульсном механическом воздействии также важно получить сведения о месте этого воздействия в данном элементе оборудования. Для этого в принципе известен прием, при котором в разных местах элемента оборудования располагают множество датчиков и по разнице времени между регистрируемыми отдельными датчиками событиями и скоростью звука в элементе оборудования определяют место воздействия. Место воздействия важно определять также и при контроле за турбиной для того, чтобы установить, произошло ли разрушение плитки (соударение отделившейся плитки с держателем направляющих лопаток или с наружной оболочкой камеры сгорания) или же импульсное воздействие вызвано обусловленными эксплуатацией явлениями трения на других участках турбины.
Для точного выявления места воздействия требуется по возможности точно определить на основе временных окон, в которых событие регистрируется датчиками, начало этого события.
Из DE 2223321 С2 известно обнаружение трещины и ее нахождения с помощью большого количества установленных на элементе оборудования пьезоэлектрических преобразователей. Для этого анализируются расхождения по времени максимального количества принятых преобразователями сигналов.
В основу изобретения положена задача создания способа выявления места импульсного механического воздействия на элемент оборудования, являющегося более совершенным по сравнению с известными из уровня техники способами. Также в основе изобретения лежит задача создания устройства для осуществления этого способа.
Задача создания способа согласно изобретению решается посредством признаков п.1 формулы изобретения. Согласно способу выявления места импульсного механического воздействия на элемент оборудования рабочий шум этого элемента непрерывно регистрируют множеством установленных на элементе датчиков и преобразуют в измерительный сигнал, при этом для анализа измерительных сигналов предусмотрены следующие этапы:
а) измерительные сигналы записывают в память во временных интервалах для временной области,
б) в первых временных окнах, следующих друг за другом в первых временных тактах и расположенных во временной области, с помощью первых заданных параметров предписания о математическом преобразовании определяют первую величину трансформант каждого измерительного сигнала,
в) на основе первых величин, определенных для каждого из заданных первых параметров, выводят для каждого первого временного такта соответственно первую оценочную функцию,
г) первые оценочные функции сравнивают с первой пороговой величиной, и превышение этой первой пороговой величины, по меньшей мере, одной из первых оценочных функций к триггерному моменту времени оценивают как признак наличия импульсной составляющей сигнала, указывающей на механическое воздействие;
д) во вторых временных окнах, следующих друг за другом во вторых временных тактах, расположенных во временной области и являющихся меньшими, чем первые временные окна, с помощью заданных вторых параметров предписания о математическом преобразовании и тех же алгоритмов определяют вторые оценочные функции,
е) на основании моментов времени, в которые вторые оценочные функции соответствовали заданному критерию, и обусловленных этим разностей времен задержки определяют место воздействия.
Изобретение покоится на идее, согласно которой чувствительность при определении импульсного воздействия существенно зависит от величины временного окна и должна длиться более длительности типичного всплеска, причем такое превышение не должно быть чрезмерным с тем, чтобы временное окно все еще располагалось в пределах длительности всплеска (длительность < временное окно < десятикратная величина длительности). Однако большое временное окно имеет тот недостаток, что оценочная функция изменяется очень медленно, вследствие чего момент времени воздействия, т.е. начало сигнала всплеска может быть определено только сравнительно неточно. Если же в одном из каналов произойдет идентификация сигнала всплеска и оценочная функция снова будет рассчитана с помощью значительно меньшего временного окна, то постоянная времени, с которой изменяется оценочная функция, соответственно уменьшится и станет возможным более точное определение ее возрастающего момента времени и, следовательно, момента времени воздействия.
Вторая задача изобретения решается посредством устройства благодаря признакам п.8 формулы изобретения, преимущества которого определяются пунктом 1 формулы изобретения.
Оптимальные варианты выполнения способа и устройства согласно изобретению приведены в зависимых пунктах формулы.
Подробнее изобретение поясняется с помощью чертежа, на котором изображено:
фиг.1 - пример выполнения устройства согласно изобретению в виде схематической принципиальной схемы;
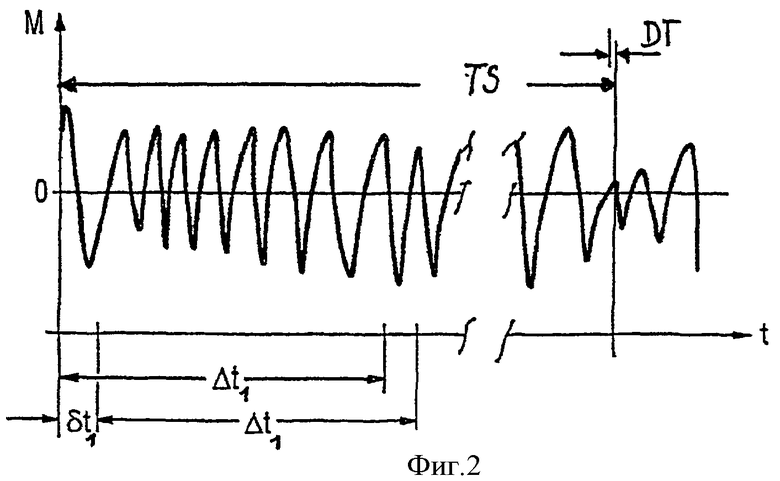
фиг.2 - упрощенная диаграмма, на которой измерительный сигнал М нанесен с высоким временным разрешением с учетом времени t;
фиг.3 - диаграмма, на которой величина А частотного спектра, полученная на основе измерительного сигнала быстрым преобразованием Фурье, при заданной частоте fi нанесена с учетом времени t;
фиг.4 - диаграмма, на которой скользящая временная средняя величина  значений спектра при заданной частоте fi нанесена также с учетом времени t;
значений спектра при заданной частоте fi нанесена также с учетом времени t;
фиг.5 - диаграмма, на которой нанесен идеальный измерительный сигнал М с непосредственно опознаваемым всплеском с учетом времени t;
фиг.6 - диаграмма, на которой нанесены оценочные функции K1 и К2, которые определили с помощью разных временных окон на основе измерительного сигнала на фиг.5, с учетом времени t;
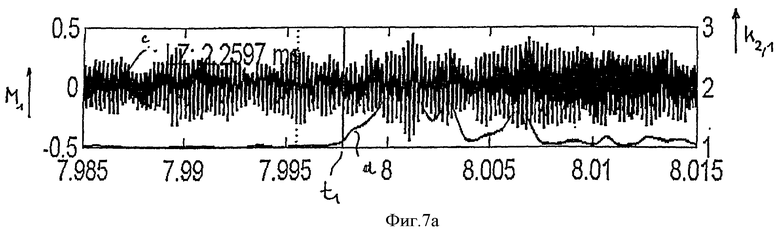
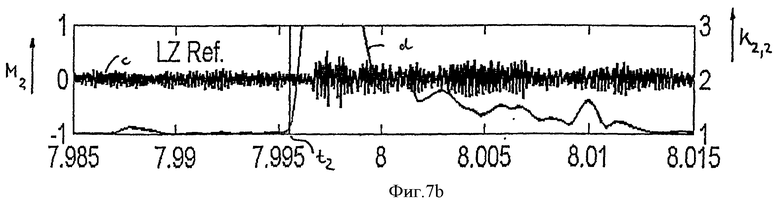
фиг.7а-7е - соответственно диаграммы, на которых нанесены рабочий шум (измерительный сигнал М) элемента оборудования при наличии постороннего воздействия, зарегистрированный расположенными в разных местах датчиками, и оценочная функция (К2), полученная способом согласно изобретению с помощью второго временного окна, с учетом времени t;
фигуры 8, 9 - соответственно диаграмма, на которой нанесены оценочная функция К2, полученная для датчика посредством второго временного окна, и ее временная производная dK2/dt с учетом времени t.
Как показано на фиг.1, на элементе 2 оборудования, например на газовой турбине, установлено множество Р датчиков измеряемых величин 41, … s, …p, в частности, пьезоэлектрические датчики ускорения, непрерывно регистрирующие в нескольких измерительных каналах рабочий шум, присутствующий в элементе 2 оборудования и образуемый в виде механического шума. Датчики 4s преобразуют сигналы механического шума соответственно в электрический измерительный сигнал Ms, который усиливается предусилителем 6 и подается в аналого-цифровой преобразователь 8, подключенный к цифровому запоминающему устройству 10.
Соответственно полученный усиленный измерительный сигнал Ms преобразуется в цифровую форму, подвергается промежуточному запоминанию и направляется для дальнейшей обработки в арифметическое устройство 12, содержащее алгоритм обработки согласно изобретению.
Для каждого измерительного канала арифметическое устройство 12 содержит процессор для быстрого расчета трансформанты переданных с аналого-цифрового преобразователя 8 данных и кольцевое запоминающее устройство для хранения в памяти полученных преобразованием трансформант в количестве L. При этом преобразовании применяется, например, быстрое окончатое преобразование Фурье FFT. Под преобразованием математической функции (измерительного сигнала Ms(t)) в смысле настоящего изобретения подразумевается любое математическое действие, посредством которого становится возможным представить эту функцию с полным набором ортогональных базовых функций. Эти ортогональные базовые функции, подобно тому, как это имеет место при преобразовании Фурье, могут быть образованы показательной функцией е-iωt. Однако в принципе в качестве ортогональной базовой системы могут также применяться и другие периодические функции. При таких преобразованиях дискретные трансформанты рассчитываются с помощью заданного комплекта дискретных параметров. Ими являются при преобразовании Фурье постоянно заданные частоты fi=ωi/2π, которые выбираются с учетом соответствующего элемента оборудования, как это подробно поясняется, например, в WO 03/071243 для турбины.
На основе полученных в арифметическом устройстве 12 дискретных трансформант определяют для каждого измерительного канала с помощью алгоритма, содержащегося в арифметическом устройстве 12 и подробнее поясняемого ниже, зависимую от времени t первую оценочную функцию K1,s(t), которая сравнивается в сравнивающем устройстве 14 с заданной первой пороговой величиной K1,0. Превышение первой пороговой величины K1,0 (тревожная предельная величина) в одном из каналов (при одном из измерительных сигналов Ms) служит признаком наличия в этом канале импульсного компонента сигнала, вызванного переменным механическим воздействием, и ведет к выработке соответствующего триггерного сигнала S. Триггерный сигнал S поступает в регистратор 16 переходных процессов, в котором записываются полученные в арифметическом устройстве 12 данные для временной области, составляющей, например, 10 с, и подается далее в анализирующее вычислительное устройство 18 для проведения с его помощью поясняемого ниже анализа измерительных сигналов Ms (t), позволяющего на основе разницы между моментами времени ts (разницы времен задержки), во время которых в каналах регистрируется начало события, знания геометрии элемента оборудования, положения датчиков и скорости звука, сделать вывод о нахождении места импульсного воздействия.
На фиг.2 поясняется с помощью принципиальной схемы первая операция введенной в арифметическое устройство 12 (фиг.1) схемы действий. Измерительный сигнал Ms, преобразуемый с высокой тактовой скоростью (как правило при 80-100 кГц) в каждом канале в цифровую форму (на фигуре показана для наглядности аналоговая форма), вводится в память для временной области TS (как правило, около 10 с) в интервале времени DT (при тактовой скорости, как правило, около 0,01-0,0125 мс) и обновляется в соответствии с тактовой скоростью. В первом временном окне Δt1, расположенном в указанной временной области TS, преобразованный в цифровую форму измерительный сигнал Ms подвергают быстрому дискретному преобразованию Фурье. Затем это первое временное окно Δt1 смещают на первый временной такт δt1 и снова проводят преобразование Фурье в накладывающемся первом временном окне Δt1 одинаковой длительности. В примере выполнения составляют: Δt1 25,6 мс и δt1 3,2 мс. Таким образом определяют для каждого первого временного окна Δt1 и для конечного числа первых дискретных частот f1,i, зависимые от времени первые величины A1,s(f1,i,t).
На фиг.3 показана временная характеристика первой величины A1,s(f1,i,t) при заданной частоте f1,i. На этой фигуре можно видеть, что данная величина A1,s(f1,i,t) варьируется во времени при указанной заданной частоте f1,i. Показанный на фигуре временной интервал является первым временным тактом δt1, в котором обновляется быстрое преобразование Фурье. Согласно изобретению для множества N заданных первых частот f1,i или частотных диапазонов и последовательно следующих во времени первых временных тактов δt1 для накладывающихся по времени первых временных окон Δt1 определяют соответствующую первую величину A1,s(f1,i,t) при tj=t0+jδt1, причем j означает натуральное число.
Из полученных таким образом первых величин A1,s(f1,i,t) вычитается усредненное значение  , образованное для первой частоты f1,i. Соответствующие алгоритмы для определения средней величины
, образованное для первой частоты f1,i. Соответствующие алгоритмы для определения средней величины  зависят от контролируемого элемента оборудования и комплексности ожидаемых рабочих шумов. В простых производственных ситуациях бывает достаточно пользоваться только постоянно заданным средним значением
зависят от контролируемого элемента оборудования и комплексности ожидаемых рабочих шумов. В простых производственных ситуациях бывает достаточно пользоваться только постоянно заданным средним значением  . Однако более оптимально определять переменное во времени среднее значение
. Однако более оптимально определять переменное во времени среднее значение  скользящим способом, как это показано на фиг.4. Применение скользящего среднего значения
скользящим способом, как это показано на фиг.4. Применение скользящего среднего значения  особенно предпочтительно при контроле за элементами оборудования, в которых возможны случайные изменения режима, при которых элемент оборудования переходит из одного рабочего режима в другой и рабочий или фоновый шум очень быстро может возрасти или упасть до заметно другого уровня. Таким изменением режима может служить в турбине, например, начало так называемой пульсации. Она вызывается расположением факелов в кольцевом пространстве, что приводит к возбуждению резонансных колебаний всей камеры сгорания, причем, в частности, предпочтительными являются типы колебаний в периферийном направлении. Такие резонансные явления могут частично резко обрываться и также резко возобновляться. Если, например, в основе раскрытого в WO 03/071243 способа, являющегося неотъемлемой составной частью настоящей заявки на патент, лежит среднее скользящее значение
особенно предпочтительно при контроле за элементами оборудования, в которых возможны случайные изменения режима, при которых элемент оборудования переходит из одного рабочего режима в другой и рабочий или фоновый шум очень быстро может возрасти или упасть до заметно другого уровня. Таким изменением режима может служить в турбине, например, начало так называемой пульсации. Она вызывается расположением факелов в кольцевом пространстве, что приводит к возбуждению резонансных колебаний всей камеры сгорания, причем, в частности, предпочтительными являются типы колебаний в периферийном направлении. Такие резонансные явления могут частично резко обрываться и также резко возобновляться. Если, например, в основе раскрытого в WO 03/071243 способа, являющегося неотъемлемой составной частью настоящей заявки на патент, лежит среднее скользящее значение  , образованное простым усреднением предыдущих величин и имеющее вид среднего арифметического значения, то оказывается, что такие колебания шумов могут приводить к ошибочным срабатываниям. Поэтому для их предупреждения на практике при пульсации турбины, определяемой посредством анализа характеристики сигнала, контроль за импульсными механическими воздействиями не проводится.
, образованное простым усреднением предыдущих величин и имеющее вид среднего арифметического значения, то оказывается, что такие колебания шумов могут приводить к ошибочным срабатываниям. Поэтому для их предупреждения на практике при пульсации турбины, определяемой посредством анализа характеристики сигнала, контроль за импульсными механическими воздействиями не проводится.
Также и в других элементах оборудования, например в корпусе реактора под давлением АЭС, на постоянные основные шумы (поток среды, шум от работы насосов) накладываются обусловленные режимом работы кратковременные шумы, вызываемые, например, допустимыми изменениями режима и преднамеренным вмешательством в производственный процесс (приведение в действие вентиляторов, перемещение регулирующих стержней).
При итерационном методе расчета, пригодном, в частности, для элементов оборудования с относительно медленным изменением состояний, определяют среднюю величину  и среднее квадратичное отклонение (дисперсию) для частоты f1,i скользящим способом посредством следующих соотношений:
и среднее квадратичное отклонение (дисперсию) для частоты f1,i скользящим способом посредством следующих соотношений:

 ,
,
где δt1 означает первый временной такт, в котором рассчитывают первую величину A1,s для первого временного окна Δt1. Выбором параметра «k» определяют степень влияния добавившейся новой первой величины  на вновь рассчитанное среднее значение
на вновь рассчитанное среднее значение  . Это математическое выражение соответствует образованию экспоненциального среднего взвешенного, где «k» определяет скорость адаптации. При резком изменении величины A1,s(fi,t) от постоянного исходного значения до также постоянного нового значения произошло бы приблизительно экспоненциальное согласование нового среднего значения
. Это математическое выражение соответствует образованию экспоненциального среднего взвешенного, где «k» определяет скорость адаптации. При резком изменении величины A1,s(fi,t) от постоянного исходного значения до также постоянного нового значения произошло бы приблизительно экспоненциальное согласование нового среднего значения  с новым текущим значением A1,s при постоянной времени τ=δt1/(1-k). При k=0,999 и δt1=3,2 мс постоянная времени τ составляет 3,2 с. Такая схема действий показана, например, для контроля за рабочими шумами в корпусе ядерного реактора под давлением.
с новым текущим значением A1,s при постоянной времени τ=δt1/(1-k). При k=0,999 и δt1=3,2 мс постоянная времени τ составляет 3,2 с. Такая схема действий показана, например, для контроля за рабочими шумами в корпусе ядерного реактора под давлением.
При контроле за элементами оборудования, в которых отмечается очень быстрое изменение режимов, например в турбинах, особенно положительно зарекомендовал себя расчетный метод, при котором среднее значение  определяется при временном скольжении во временных тактах δt1 в качестве функции времени t из записи данных
определяется при временном скольжении во временных тактах δt1 в качестве функции времени t из записи данных  , состоящей из М первых величин A1,s(f1,i,tm) временного периода Т и представленной на фиг.3, с помощью соотношения:
, состоящей из М первых величин A1,s(f1,i,tm) временного периода Т и представленной на фиг.3, с помощью соотношения:
 ,
,
где Qα,s и Q1-α,s означают квантиль α или квантиль (1-α) определенных в первом временном такте Т первых величин A1,s(f1,i,tm) при tm=t+mδt1 и m означает целое число. Для этого в виде ряда располагают соответствующие первые величины A1,s(fi,tm) по их значению, образующие запись данных A1,s(fi,t), отнесенную, например, к симметрично расположенному по отношению к моменту времени t временному периоду Т (в данном случае действительно:  , M - нечетное число) и соответственно к моменту времени t. В этом случае квантиль α или квантиль (1-α) представляет собой то значение, которое находится в положении αМ или (1-α)М ряда. На практике для α задаются значения 0,7≤α≤0,8, предпочтительно α=0,75.
, M - нечетное число) и соответственно к моменту времени t. В этом случае квантиль α или квантиль (1-α) представляет собой то значение, которое находится в положении αМ или (1-α)М ряда. На практике для α задаются значения 0,7≤α≤0,8, предпочтительно α=0,75.
С помощью квантиля α и квантиля (1-α)Qα,s или Q1-α,s рассчитывают среднее отклонение ss(f1,i,t) первых величин  от среднего значения
от среднего значения  с помощью соотношения:
с помощью соотношения:
 ,
,
где q1-α,s означает квантиль (1-α) нормированного гауссова распределения.
Следовательно, с помощью этого расчетного метода (метода квантиля) рассчитываются среднее значение и отклонение записи данных без учета величин, не входящих в диапазоны, задаваемые посредством α и (1-α). Это означает, что заметно большие величины, которые могут дополнительно образоваться вследствие наложения сигнала всплеска, во внимание не принимаются и, следовательно, не могут фальсифицировать событие. С помощью этого метода может выбираться заметно более короткий период времени, например состоящая из М=100 первых величин A1,s(f1,i,t) запись данных  с продолжительностью временного периода Т=320 мс при временном такте δt1=3,2 мс и при одинаковом качестве расчета. Это имеет своим следствием то, что среднее значение
с продолжительностью временного периода Т=320 мс при временном такте δt1=3,2 мс и при одинаковом качестве расчета. Это имеет своим следствием то, что среднее значение  приходит в соответствие с быстрыми изменениями рабочего фонового шума, в результате чего они не могут привести к фальсификации нормированных спектров или к ошибочной индикации во время контроля. При таком способе действий можно обнаружить при пульсации газовой турбины, т.е. когда вследствие резонансных колебаний в камере сгорания очень резко, например, при постоянной времени около 0,5 секунды и пятикратном возрастании амплитуды возникают заметно повышенные фоновые шумы, удары, производимые посторонними предметами.
приходит в соответствие с быстрыми изменениями рабочего фонового шума, в результате чего они не могут привести к фальсификации нормированных спектров или к ошибочной индикации во время контроля. При таком способе действий можно обнаружить при пульсации газовой турбины, т.е. когда вследствие резонансных колебаний в камере сгорания очень резко, например, при постоянной времени около 0,5 секунды и пятикратном возрастании амплитуды возникают заметно повышенные фоновые шумы, удары, производимые посторонними предметами.
Таким образом, с помощью рассчитанного выше среднего значения  и среднего отклонения s(f1,i,t) возможно определить при следующей вычислительной операции на основе способа квантиля более точное среднее значение
и среднего отклонения s(f1,i,t) возможно определить при следующей вычислительной операции на основе способа квантиля более точное среднее значение  , при этом из имеющейся записи данных
, при этом из имеющейся записи данных  исключаются те первые величины A1,s(f1,i,tm), которые заметно превышают рассчитанное выше среднее значение . На практике положительно зарекомендовал себя прием, при котором исключается расчет среднего значения тех первых величин
исключаются те первые величины A1,s(f1,i,tm), которые заметно превышают рассчитанное выше среднее значение . На практике положительно зарекомендовал себя прием, при котором исключается расчет среднего значения тех первых величин  , которые превышают
, которые превышают  . Тогда при использовании полной записи данных
. Тогда при использовании полной записи данных  проводится новый расчет среднего значения с помощью квантиля δ или квантиля (1-δ), при этом действительно:
проводится новый расчет среднего значения с помощью квантиля δ или квантиля (1-δ), при этом действительно:
δ=α(М-МЕ)/М,
где ME - количество первых величин  , которые превышают
, которые превышают  . В качестве альтернативы также возможно и математически равноценно определять повторно квантиль α или квантиль (1-α) с помощью записи данных, сокращенной на указанные величины. Следовательно, посредством этих квантилей δ или (1-δ) или полученных с помощью сокращенной записи данных квантилей α или (1-α) можно вычислить по указанной выше формуле более точное среднее значение
. В качестве альтернативы также возможно и математически равноценно определять повторно квантиль α или квантиль (1-α) с помощью записи данных, сокращенной на указанные величины. Следовательно, посредством этих квантилей δ или (1-δ) или полученных с помощью сокращенной записи данных квантилей α или (1-α) можно вычислить по указанной выше формуле более точное среднее значение  или более точное среднее отклонение Sopt,s(f1,i, t).
или более точное среднее отклонение Sopt,s(f1,i, t).
С помощью рассчитанных выше средних значений  или
или  и среднего отклонения ss(fi,t) или Sopt,s(fi,t) рассчитывается нормированное отклонение Ds(fi,t) первой величины A1,s от среднего значения
и среднего отклонения ss(fi,t) или Sopt,s(fi,t) рассчитывается нормированное отклонение Ds(fi,t) первой величины A1,s от среднего значения  по следующему уравнению:
по следующему уравнению:
 или
или
 .
.
Для определения действительного в момент времени t среднего значения и действительного в этот момент времени t среднего отклонения ss(fi,t) анализируют первые величины (A1,s(f1,i,tm) M спектров. Другими словами, как среднее значение  или
или  , так и среднее отклонение ss(f1,i,t) или sopt,s(f1,i,t) постоянно обновляются с помощью M преобразований. Такое обновление производится в первых временных тактах δt1. Запись данных
, так и среднее отклонение ss(f1,i,t) или sopt,s(f1,i,t) постоянно обновляются с помощью M преобразований. Такое обновление производится в первых временных тактах δt1. Запись данных  , лежащую в основе расчета нового среднего значения
, лежащую в основе расчета нового среднего значения  или
или  или нового отклонения ss(f1,i,t+δt1) или sopt,s(f1,i, t+δt1), образуют исключением первой (наиболее ранней) величины и добавлением новейшей величины. Ею являются при симметрично расположенном к моменту времени t временном периоде Т первые величины:
или нового отклонения ss(f1,i,t+δt1) или sopt,s(f1,i, t+δt1), образуют исключением первой (наиболее ранней) величины и добавлением новейшей величины. Ею являются при симметрично расположенном к моменту времени t временном периоде Т первые величины:
 или
или  .
.
Согласно первому предпочтительному варианту выполнения дополнительно усредняют нормированное отклонение Ds(t,f1,i) в диапазоне частот f1,i-L, f1,i-L+1, … f1,i+L, включающем в себя частоту f1,i и состоящем из частот 2L+1, и определяют среднее нормированное отклонение  с помощью уравнения:
с помощью уравнения:
 .
.
Эта дополнительная вычислительная операция позволяет уменьшить размер и ширину колебаний нормированного отклонения в диапазонах, в которых присутствуют только сигналы фонового шума. Компоненты полезного сигнала заметно не изменяются при усреднении в частотном диапазоне, так как они всегда концентрировано возникают около соседних частотных линий. С помощью этой меры дополнительно улучшается отношение «сигнал/фон» на 10-15 дБ.
Последующее уточнение отношения «сигнал/фон» достигается в результате дополнительного введения пороговой величины D0,s и определения нормированного отклонения  с помощью соотношения:
с помощью соотношения:  при
при  и
и  при
при  .
.
Полученные при этом нормированные отклонения Ds(f1,i,t),  или
или  возводят в квадрат и суммируют через любые дискретные частоты fi:
возводят в квадрат и суммируют через любые дискретные частоты fi:


или

Из полученной суммы Ss(t) выводится первая оценочная функция K1,s(t) путем образования корня:
 .
.
Она служит указателем на происшедший удар. В качестве альтернативы оценочная функция может быть образована расчетом разницы между корнем из суммы Ss(t) и скользящим временным средним значением этого корня:

и служить в качестве параметра возникновения удара. Если K1,s(t) или ~K1,s(t) превышает первую пороговую величину K1,0 (тревожную предельную величину), которая для газовой турбины составляет 1,5-2, то это служит указанием на удар постороннего предмета. В основе последующих пояснений лежат приводимые в качестве примера, рассчитанные с помощью уравнения (1) оценочные функции К.
Точность, с которой для каждого из датчиков возможно определение момента времени ts, в который происходит событие и, следовательно, возможна разность времен задержки, в существенной степени определяется скоростью возрастания первой оценочной функции K1,s. Однако рост первой оценочной функции K1,s происходит тем медленнее, чем больше первое временное окно Δt1.
Это представлено на фигурах 5, 6 для измерительного канала. На фиг.5 показан идеальный измерительный сигнал М в зависимости от времени t, на который наложен всплеск 20 во временном интервале от ta до tb. На фиг.6 можно видеть идеальную диаграмму, на которой первая и вторая оценочные функции K1 (кривая а) и К2 (кривая b) нанесены в зависимости от времени t, которые были выведены с помощью разных первого и второго, лежащих во временной области TS временных окон Δt1 из измеряемого сигнала М на фиг.5. Если теперь первую оценочную функцию K1 определять в первом временном окне Δt1, в котором еще не начался всплеск 20, то в идеальном случае будет получено K1=1 (если вместо K1 применяется ~K1 в качестве первой оценочной функции, то в идеальном случае получают ~K1=0). Первое временное окно Δt1 смещается вправо в первом временном такте δt1 и всплеск 20 последовательно регистрируется первым временным окном Δt1, вследствие чего при преобразовании Фурье присутствующие во всплеске 20 частотные компоненты начинают играть все возрастающую роль при расчете первой оценочной функции K1. Если же первое временное окно Δt1 своим правым краем достигает всплеска 20 в момент времени tb, то всплеск 20 полностью находится в пределах этого первого временного окна Δt1, в результате чего первая оценочная функция K1 достигает своего максимума. Если однако левый край первого временного окна Δt1 совпадет с концом всплеска 20, то первая оценочная функция K1 снова упадет до 1. На основе ширины первого временного окна Δt1, которая соответствует, по крайней мере, ширине ожидаемого всплеска 20, увеличение первой оценочной функции K1 произойдет относительно медленно во временном окне ta-tb, как это показано кривой «а» на фиг.6. На фиг.5 изображено второе временное окно Δt2, которое значительно меньше первого Δt1. С помощью второго временного окна Δt2 рассчитывается вторая оценочная функция К2 в более коротких временных тактах δt2<δt1 с помощью тех же, указанных выше при расчете первой оценочной функции K1 вторых частот f2,i, приведенных в соответствие с более коротким вторым временным окном Δt2 (параметром). Поскольку как второе временное окно Δt2, так и вторые временные такты δt2 короче первого временного окна Δt1 и первых временных тактов δt1, то вторая оценочная функция возрастает значительно быстрее первой оценочной функции K1 и достигает своего максимума уже в существенно более коротком временном окне, соответствующем в примере на фигуре приблизительно длительности второго временного окна Δt2, как это показано на фиг.6 кривой b. Также на этой фигуре можно видеть, что вторая оценочная функция К2, рассчитанная с помощью второго, более короткого временного окна Δt2, характеризуется вследствие меньшего массива данных, лежащего в основе преобразования Фурье, значительно более интенсивным шумом.
Вследствие меньшего размера временного окна Δt2 частотный спектр содержит меньше дискретных частот. Другими словами, вторые величины A2,s(f2,i,t) относятся к меньшему количеству вторых частот f2, причем множество вторых частот f2,i является лишь частью множества первых частот f1,i.
С помощью первых оценочных функций K1,s(t), рассчитанных для всех измерительных каналов посредством указанных выше алгоритмов, проводится контроль за всеми измерительными каналами для обнаружения всплеска с очень высокой чувствительностью, причем принимается во внимание, что начало всплеска может быть определено в отдельных каналах лишь с незначительной точностью.
Если же в одном из измерительных каналов будет обнаружен в триггерный момент времени t0 всплеск (возрастание первой оценочной функции K1 через первую пороговую величину > K1,0), то вырабатывается триггерный сигнал, которым замораживаются приблизительно на 10 секунд накопленные во всех каналах измерительные сигналы во временной области TS, расположенной приблизительно симметрично вокруг момента времени t0 триггерного сигнала (запуск с опережением). В этом случае для всех каналов рассчитываются соответственно вторые оценочные функции K2,s(t) с помощью приведенных выше алгоритмов, однако при этом расчете за основу берутся средние значения  и стандартные отклонения ss(f2,i,t), полученные перед триггерным моментом времени t0 или во время его на основе первых величин A1,s(f1,i,t) и действующие для вторых частот f2,i. Это возможно, поскольку до триггерного момента времени отсутствует наложенный сигнал всплеска и, следовательно, эти величины характеризуют только рабочий фоновый шум, при этом, кроме того, делается допущение, согласно которому через короткое время во время всплеска рабочий фоновый шум существенно не изменится.
и стандартные отклонения ss(f2,i,t), полученные перед триггерным моментом времени t0 или во время его на основе первых величин A1,s(f1,i,t) и действующие для вторых частот f2,i. Это возможно, поскольку до триггерного момента времени отсутствует наложенный сигнал всплеска и, следовательно, эти величины характеризуют только рабочий фоновый шум, при этом, кроме того, делается допущение, согласно которому через короткое время во время всплеска рабочий фоновый шум существенно не изменится.
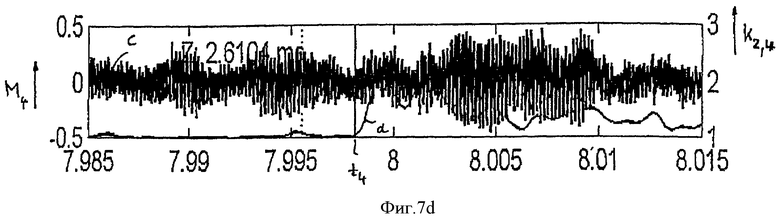
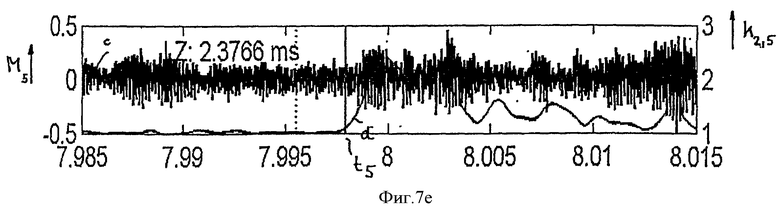
На фигурах 7а-7е показан измерительный сигнал Ms (M1-6) (кривые «с») для временного периода около 30 мс, зарегистрированный датчиком 4s (41-6) на корпусе ядерного реактора под давлением в разных местах измерения. На диаграммах можно непосредственно видеть, что во всяком случае на диаграмме на фиг.7 можно определить по измеряемому сигналу M2 наличие события, но при этом нельзя установить на основании измерительного сигнала, является ли причиной переход на другой режим работы или же произошло импульсное событие, вызванное ударом постороннего предмета.
Вторая оценочная функция K2,s(t), полученная указанным выше способом, на фигурах 7а-7е показана в виде непрерывной кривой d. В изображенном примере вторая оценочная функция K2,s(t) рассчитана итеративным методом. Таким образом на фигурах можно видеть, что вторая оценочная функция K2,s(t) характеризуется в разные моменты времени ts = от t1 до t6 значительным ростом. Эти моменты времени ts могут быть определены, например, в виде моментов времени, в которые вторые оценочные функции K2,s(t) превышают соответствующую заданную вторую пороговую величину К2,0. Если эти моменты времени ts известны, то можно будет с уверенностью не только выявить возникновение импульсного события, но также будет возможно определить при известности места расположения датчика на основании разницы времен задержки LZ t1-t2, t1-t3… (в примере t1-t2, t3-t2, t4-t2, t5-t2 и t6-t2) место происшедшего удара.
С помощью рассчитанной этим методом по каждому измерительному каналу второй оценочной функции K2,s на следующем этапе проводится более точный расчет моментов времени ts, в которые сигнал всплеска, вызванный импульсным воздействием, поступил на место нахождения соответствующего датчика 4s. Этот более точный расчет ниже поясняется с помощью диаграмм на фигурах 8, 9.
На фиг.8 изображена типичная характеристика рассчитанной этим способом второй оценочной функции K2,s (второй временной такт δt2=0,16 мс, второе временное окно Δt2=2,56 мс). Эта вторая оценочная функция K2,s превышает вторую пороговую величину К2,0 в момент времени ts. На основе этой первой пороговой величины K1,0 рост второй оценочной функции K2,s относят к всплеску. Теперь вторую оценочную функцию K2,s дифференцируют в зависимости от времени t. Соответствующее отношение дифференциалов dK2,s/dt нанесено на фиг.9 в зависимости от времени в виде кривой. На этой кривой, начиная от момента времени ts, отыскивается такой момент времени, в который отношение дифференциалов равно 0, т.е. вторая оценочная функция K2,s достигает своего локального максимума. Это происходит в момент времени t1. Теперь определяют момент времени t2<t1, в который кривая достигла величину 0. В этой области от t2 до t1 и определяется максимум DKmax,s, который указывает на максимальную крутизну второй оценочной функции K2,s. С помощью этого максимума DKmax,s теперь рассчитывают дифференциальную пороговую величину DK0,s посредством соотношения DK0,s=βDKmax,s, где β означает величину от 0,05 до 0,2. Момент времени ts,korr., в который первая производная dK2,s/dt в интервале времени t2-t1 в первый раз превысила указанную дифференциальную величину DK0,s, используется в качестве откорректированного момента времени для расчета разностей времен задержки. Таким образом возможно точное определение времени задержки.
Перечень позиций
2 - элемент оборудования
41,s,p - датчик
6 - предусилитель
8 - мультиплексор
10 - аналого-цифровой преобразователь
12 - арифметическое устройство
14 - сравнивающее устройство
16 - регистратор переходных процессов
18 - анализирующее вычислительное устройство
20 - всплеск
Ms - измерительный сигнал
K1,s; K2,s - первая и вторая оценочные функции
T - время
Δt1,2 - первое и второе временные окна
δt1,2 - первый и второй этапы времени
A1,s; A2,s - первая и вторая величины
fi - частота
 - среднее значение
- среднее значение
 - запись данных
- запись данных
Т - временной период
TS - временная область
DT - временной интервал
ts - момент времени
ts,korr - откорректированный момент времени
t1, t2 - момент времени
DKmax,s - максимум
DK0,s - дифференциальная пороговая величина
K1,0 - первая пороговая величина
К2,0 - вторая пороговая величина
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСКОРЕННОГО ПОИСКА ШИРОКОПОЛОСНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2514133C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
| Способ измерения длительности импульсов | 2023 |
|
RU2805972C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТА-ТОК | 2004 |
|
RU2274948C2 |
| СПОСОБ ЛИНЕАРИЗАЦИИ ПРОХОДНОЙ ХАРАКТЕРИСТИКИ ВРЕМЯИМПУЛЬСНОГО ОММЕТРА РЕЛЕЙНОЙ ЗАЩИТЫ | 2010 |
|
RU2417479C1 |
| Способ третьей решающей схемы ускоренного поиска и эффективного приема широкополосных сигналов | 2019 |
|
RU2730389C1 |
| СПОСОБ ПОИСКА НЕИСПРАВНЫХ БЛОКОВ В ДИСКРЕТНОЙ ДИНАМИЧЕСКОЙ СИСТЕМЕ | 2012 |
|
RU2506622C1 |
| СПОСОБ ПРИВЯЗКИ ВРЕМЕНИ В ИЗМЕРИТЕЛЬНЫХ КОМПЛЕКСАХ ДЛЯ ОЦЕНКИ КАЧЕСТВЕННЫХ ПАРАМЕТРОВ ОБМЕНА IP-ПАКЕТАМИ | 2013 |
|
RU2532730C1 |
| Устройство третьей решающей схемы ускоренного поиска и эффективного приема широкополосных сигналов | 2023 |
|
RU2808721C1 |
| Способ оценки различий мощности осцилляторных компонент сигналов электроэнцефалограммы в психофизиологических состояниях на основе квантильного анализа | 2018 |
|
RU2713110C1 |








В способе и устройстве для выявления места импульсного механического воздействия на элемент (2) оборудования непрерывно регистрируется присутствующий в этом элементе (2) рабочий шум с помощью множества установленных на элементе (2) оборудования датчиков (4s), которыми он преобразуется в измерительный сигнал (М), подвергаемый в первых временных окнах (Δt1) преобразованию. На основе множества полученных при этом первых трансформант выводят первую оценочную функцию (K1,s) указывающую на присутствие импульсного механического воздействия на элемент (2) оборудования. Согласно изобретению при обнаружении воздействия во вторых, более коротких временных окнах (Δt2) с использованием тех же алгоритмов выводят соответственно вторые трансформанты и вторые оценочные функции (К2,s), на основе которых определяют момент времени (ts), в который образованный в результате воздействия звуковой сигнал поступает на датчик (4s). На основе разницы времен задержки датчиков (4s) точно определяют воздействия. Техническим результатом изобретения является повышение точности определения места воздействия. 2 н. и 13 з.п. ф-лы, 9 ил.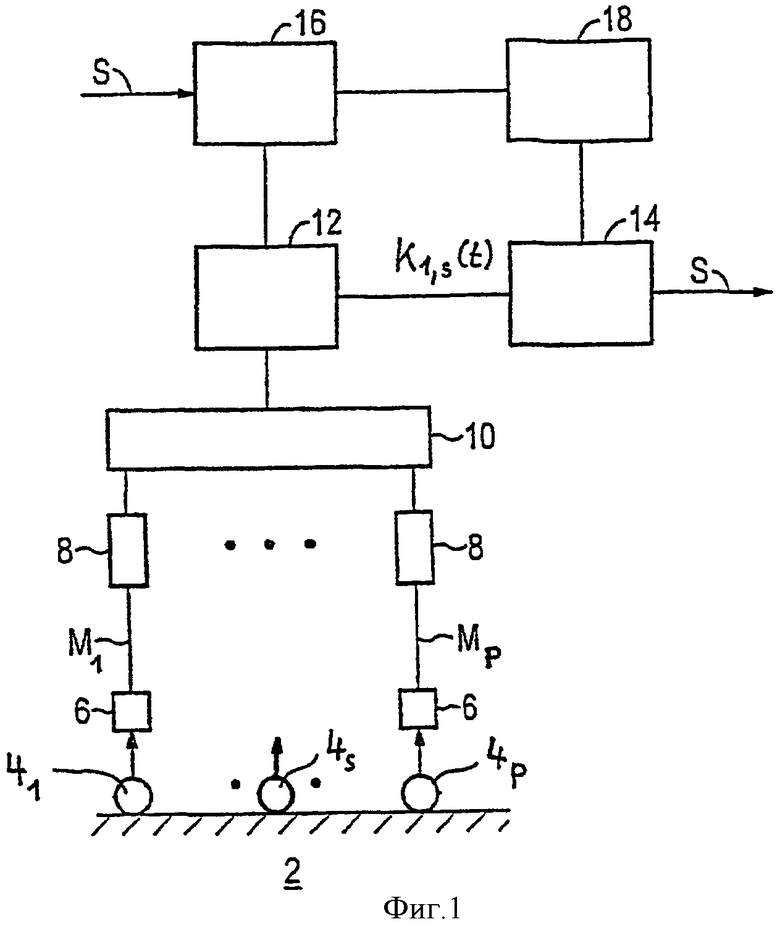
1. Способ выявления места импульсного механического воздействия на элемент (2) оборудования, при котором непрерывно регистрируют присутствующий в элементе (2) оборудования рабочий шум посредством множества (Р) установленных на этом элементе (2) датчиков (4s) и преобразуется ими в измерительный сигнал (Ms), со следующими признаками:
а) измерительные сигналы (Ms) записывают в память во временные интервалы (DT) для временной области (TS),
б) в первых временных окнах (Δt1), следующих друг за другом в первых временных тактах (δt1) и расположенных во временной области (TS), с помощью первых заданных параметров (f1,i) предписания о математическом преобразовании определяют первую величину (A1,s(f1,i,t) трансформант каждого измерительного сигнала (Ms),
в) на основе первых величин (A1,s(f1,i, t), определенных для каждого из заданных первых параметров (f1,i), выводят для каждого первого временного такта (δt1) соответственно первую оценочную функцию (K1,s(t));
г) первые оценочные функции (K1,s(t)) сравнивают с первой пороговой величиной (К1,0), и превышение этой первой пороговой величины (К1,0), по меньшей мере, одной из первых оценочных функций (K1,s(t)) к триггерному моменту времени (t0) оценивается как признак наличия импульсной составляющей сигнала, указывающей на механическое воздействие;
д) во вторых временных окнах (Δt2), следующих друг за другом во вторых временных тактах (δt2), расположенных во временной области (TS) и являющихся меньшими, чем первые временные окна (Δt1), с помощью заданных вторых параметров (f2,i) предписания о математическом преобразовании и тех же алгоритмов определяют вторые оценочные функции (K2,s(t)),
е) на основании моментов времени (ts), в которые вторые оценочные функции (K2,s(t)) соответствовали заданному критерию, и обусловленных при этом разностей времен задержки определяют место воздействия.
2. Способ по п.1, характеризующийся тем, что вторые временные такты (δt2) являются короче первых временных тактов (δt1).
3. Способ по п.1, характеризующийся тем, что для каждого первого временного такта (δt1) и каждого заданного первого параметра (f1,i) определяют отклонение первых величин (A1,s(f1,i,t) от первого среднего значения  и соответствующее ему среднее отклонение (ss(f1,i,t)), на основе которых для каждого заданного первого параметра (f1,i) и каждого первого временного такта (δt1) выводят первую оценочную функцию (K1,s, t)), и при котором при расчете второй оценочной функции (K2,s(t)) за основу берут как среднее значение
и соответствующее ему среднее отклонение (ss(f1,i,t)), на основе которых для каждого заданного первого параметра (f1,i) и каждого первого временного такта (δt1) выводят первую оценочную функцию (K1,s, t)), и при котором при расчете второй оценочной функции (K2,s(t)) за основу берут как среднее значение  , действительное для второго параметра (f2,i) в триггерный момент времени (t0), так и соответствующее среднему значению
, действительное для второго параметра (f2,i) в триггерный момент времени (t0), так и соответствующее среднему значению  среднее отклонение (ss(f1,i,t0).
среднее отклонение (ss(f1,i,t0).
4. Способ по п.2, характеризующийся тем, что для каждого первого временного такта (δt1) и каждого заданного первого параметра (f1,i) определяют отклонение первых величин (A1,s(f1,i,t) от первого среднего значения  и соответствующее ему среднее отклонение (ss(f1,i,t)), на основе которых для каждого заданного первого параметра (f1,i) и каждого первого временного такта (δt1) выводят первую оценочную функцию (K1,s,(t)), и при котором при расчете второй оценочной функции (K2,s(t)) за основу берут как среднее значение
и соответствующее ему среднее отклонение (ss(f1,i,t)), на основе которых для каждого заданного первого параметра (f1,i) и каждого первого временного такта (δt1) выводят первую оценочную функцию (K1,s,(t)), и при котором при расчете второй оценочной функции (K2,s(t)) за основу берут как среднее значение  , действительное для второго параметра (f2,i) в триггерный момент времени (t0), так и соответствующее среднему значению
, действительное для второго параметра (f2,i) в триггерный момент времени (t0), так и соответствующее среднему значению  среднее отклонение (ss(f1,i,t0).
среднее отклонение (ss(f1,i,t0).
5. Способ по одному из пп.1-4, характеризующийся тем, что заданный критерий выполняется в том случае, когда вторые оценочные функции (K2,S(t)) превышают соответственно вторую пороговую величину (К2,0).
6. Способ по п.1, характеризующийся тем, что заданный критерий выполняется в том случае, когда первая производная второй оценочной функции (K2,s(t)) превышает дифференциальную пороговую величину (DK0,s).
7. Способ по п.2, характеризующийся тем, что заданный критерий выполняется в том случае, когда первая производная второй оценочной функции (K2,s(t)) превышает дифференциальную пороговую величину (DK0,s).
8. Способ по п.3, характеризующийся тем, что заданный критерий выполняется в том случае, когда первая производная второй оценочной функции (K2,s(t)) превышает дифференциальную пороговую величину (DK0,s).
9. Способ по п.4, характеризующийся тем, что заданный критерий выполняется в том случае, когда первая производная второй оценочной функции (K2,s(t)) превышает дифференциальную пороговую величину (DK0,s).
10. Способ по п.6, характеризующийся тем, что дифференциальная пороговая величина (DK0,s) выводится на основании максимальной крутизны (DKmax,s) фронта второй оценочной функции (K2,s(t)).
11. Способ по п.7, характеризующийся тем, что дифференциальная пороговая величина (DK0,s) выводится на основании максимальной крутизны (DKmax,s) фронта второй оценочной функции (K2,s(t)).
12. Способ по п.8, характеризующийся тем, что дифференциальная пороговая величина (DK0,s) выводится на основании максимальной крутизны (DKmax,s) фронта второй оценочной функции (K2,s(t)).
13. Способ по п.9, характеризующийся тем, что дифференциальная пороговая величина (DK0,s) выводится на основании максимальной крутизны (DKmax,s) фронта второй оценочной функции (K2,s(t)).
14. Способ по одному из пп.10-13, характеризующийся тем, что дифференциальную пороговую величину (DK0,s) определяют с помощью соотношения DK0,s=βDKmax,s, где 0,05<β<0,2.
15. Устройство для выявления места импульсного механического воздействия на элемент (2) оборудования, содержащее множество (Р) установленных на этом элементе (2) датчиков (4s) для непрерывной регистрации и измерения присутствующего в элементе (2) оборудования рабочего шума, а также, по меньшей мере, один расположенный за датчиками (4s) аналого-цифровой преобразователь (10) для преобразования в цифровую форму регистрируемых датчиками (4s) измерительных сигналов (Ms) и передачи оцифрованных измерительных сигналов (М) в арифметическое устройство (12) для выполнения следующих вычислительных операций:
а) измерительные сигналы (Ms) записывают в память во временные интервалы (DT) для временной области (TS),
б) в первых временных окнах (Δt1), следующих друг за другом в первых временных тактах (δt1) и расположенных во временной области (TS), с помощью первых заданных параметров (f1,i) предписания о математическом преобразовании определяют первую величину (Ai,s(f1,i,t) трансформант каждого измерительного сигнала (Ms),
в) на основе первых величин (A1,s(f1,i,t), определенных для каждого из заданных первых параметров (f1,i) выводят для каждого первого временного такта (δt1) соответственно первую оценочную функцию (K1,s(t));
г) первые оценочные функции (K1,s(t)) сравнивают с первой пороговой величиной (K1,0), и превышение этой первой пороговой величины (К1,0), по меньшей мере, одной из первых оценочных функций (K1,s(t)) к триггерному моменту времени (t0) оценивается как признак наличия импульсной составляющей сигнала, указывающей на механическое воздействие;
д) во вторых временных окнах (Δt2), следующих друг за другом во вторых временных тактах (δt2), расположенных во временной области (TS) и являющихся меньшими, чем первые временные окна (Δt1), с помощью заданных вторых параметров (f2,1) предписания о математическом преобразовании и тех же алгоритмов определяют вторые оценочные функции (K2,s(t)),
е) на основании моментов времени (ts), в которые вторые оценочные функции (K2,s(t)) соответствовали заданному критерию, и обусловленных при этом разностей времен задержки определяют место воздействия.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ ИСТОЧНИКА СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ | 1990 |
|
RU1730917C |
| Способ определения координат источника сигналов акустической эмиссии | 1983 |
|
SU1255913A1 |
| WO 03071243 A1, 28.08.2003 | |||
| СПОСОБ ПРОИЗВОДСТВА СПИРТА | 2001 |
|
RU2223321C2 |
| WO 2004040246 A1, 13.05.2004. | |||

