Изобретение относится к радиолокационной технике, а именно к дальнометрии. Данное изобретение предназначено для измерения дальности до цели с помощью импульсно-доплеровской РЛС, работающей с высокой частотой повторения излучаемых импульсов в режиме сопровождения цели на "проходе" (СНП).
Известен способ измерения дальности до цели, включающийся в линейно-частотной модуляции несущей частоты (ЛЧМ).
Такой способ описан в литературе (см. Справочник по радиолокации, т. 3, под ред. М.Сколника, стр. 383, М. "Советское радио", 1979 г.).
Способ включает последовательное излучение сигнала с ЛЧМ несущей частоты с определенной крутизной и без ЛЧМ, измерение доплеровских сдвигов частоты сигнала от цели и вычисление дальности до цели делением разности доплеровских сдвигов на удвоенную крутизну изменения несущей частоты. Точность измерения дальности по этому способу низкая ввиду того, что разность доплеровских сдвигов определяется с малой точностью.
В бортовых радиолокационных станциях применяются различные способы чередования излучения сигналов с линейно-частотной модуляцией несущей и без нее. В одних станциях до обнаружения цели используются сигналы без ЛЧМ, а после обнаружения цели и вычисления доплеровского сдвига частот путем последовательной посылки сигнала с ЛЧМ с крутизнами S1 и S2. Две крутизны применяются для вычисления дальностей до нескольких целей.
В других станциях обзор осуществляется последовательным применением сигналов без ЛЧМ и с ЛЧМ с крутизнами S1 и S2 и вычислением дальности в "плавающем окне", где последовательность используемых сигналов S = 0, S = S1, S = S2 может быть произвольной.
Известно также несколько способов измерения дальности в импульсно-доплеровских системах, позволяющих получить высокую точность измерения, в которых за время наблюдения цели производят ступенчатое изменение в определенных пределах частоты повторения зондирующих импульсов.
Известный способ включает последовательное излучение сигнала с двумя рабочими частотами повторения импульсов, определение временного положения отраженных от цели импульсов на каждой частоте повторения и определение истинной дальности. Указанный способ обеспечивает измерение дальности в режиме обзора в РЛС со средней частотой повторения.
Другой известный двухчастотный способ измерения дальности, являющийся прототипом заявляемого способа, описан в литературе (см. "Бортовые радиолокационные системы" под ред. Д.Повейсила., Р.Ровена, П.Уотермана, Воениздат МО СССР, Москва, 1964 г., стр. 317-320). Излучение импульсов осуществляется с двумя частотами повторения F1 и F2. В связи с неоднозначностью измерения отметка от цели, истинная дальность которой соответствует tц, будет появляться на каждом периоде повторения на дистанции, соответствующей задержкам по времени t1 и t2 относительно ближайшей отметки от зондирующего импульса. Таким образом
где n1 и n2 - количество интервалов однозначного измерения дальности для каждой частоты повторения импульсов;
t1, t2 - неоднозначные дальности на частотах повторения F1 и F2 соответственно, выраженные в единицах времени;
tц - дальность до цели, выраженная в единицах времени.
Существует несколько возможных соотношений между n1 и n2: n1 = n2, n1 - 1 = n2, n1 + 1 = n2 и т.д.
Подставляя эти соотношения в (1), получим формулы для определения задержки во времени, соответствующей истинной дальности цели.
Выбрав соотношение n1 = n2, получим
Из (2) следует, что, использование двух частот повторения позволяет осуществлять однозначное измерение дальности вплоть до необходимой предельной дистанции, соответствующей задержке во времени, равной
где  определяется значением необходимой максимальной дальности.
определяется значением необходимой максимальной дальности.
При работе РЛС с высокой частотой повторения излучаемых импульсов требуется измерять большие дальности до цели при неоднозначности (отношении дальности до цели к дальности, соответствующей периоду обзора), равной ~ 100, тогда как описанный двухчастотный способ обеспечивает измерение дальности при неоднозначности 5-6.
Для дальнейшего увеличения дистанции однозначного измерения дальности можно использовать многочастотный способ с применением трех или более частот повторения импульсов, но при последовательном переходе от одной частоты повторения к другой при неизменной ширине полосы пропускания приемного канал время наблюдения цели должно быть увеличено пропорционально количеству используемых частот повторения импульсов. При дальности порядка 100 км для оценки ее с высокой точностью вышеуказанным способом практически используется 10-12 частот повторения, что не может быть реализовано в режиме сопровождения целей на проходе из-за малого времени радиолокационного контакта с целью.
Увеличение периода повторения для достижения необходимой дистанции однозначного измерения приводит к тому, что обнаружение и сопровождение целей "на проходе" вследствие снижения средней мощности излучаемого сигнала и вследствие того, что обнаружение и сопровождение целей будет происходить на фоне отражений от земной поверхности, приводит к уменьшению дальности действия РЛС и к значительным ложным измерениям, обусловленным "блестящими" точками на фоне подстилающей поверхности.
Целью данного изобретения является повышение точности измерения дальности в условиях ограниченного времени радиолокационного контакта с целью.
Эта цель достигается сочетанием операций двух способов - линейно-частотной модуляции и двухчастотного в определенной, неизвестной ранее последовательности и выборе частоты повторения F2 по формуле
Других технических решений, имеющих признаки, сходные с отличительными, не обнаружено, следовательно, предлагаемое изобретение отвечает критерию "существенные отличия".
Предлагаемый способ измерения дальности состоит в следующем. Время облучения цели с частотой F1 делится на два интервала (такта). На первом такте частотная модуляция несущей не осуществляется и производится измерение доплеровского сдвига сигнала от цели. В течение второго такта частоты передатчика и местного гетеродина меняются линейно с крутизной S. За время распространения сигнала до цели и обратно частота местного гетеродина изменяется так, что каждый сигнал от цели после гетеродинирования дополнительно к доплеровскому сдвигу получает сдвиг, пропорциональный дальности. Определяется разность частот Δ F двух сигналов (отраженного сигнала и сигнала гетеродина) и дальность вычисляется по формуле
Измерение дальности способом ЛЧМ несущей не накладывает практических ограничений на максимальную измеряемую дальность, но дает большую (±6 км) ошибку Δ Д.
Для повышения точности определения дальности раскрывают неопределенность ± Δ Д в вычисленном значении ДЛЧМ, используя две частоты повторения импульсов. Для этого выделяют интервал возможных значений дальности, равный 2 • Δ Д:
[Длчм-ΔД; Длчм+ΔD].
Внутри этого интервала использование двух частот повторения позволяет определить однозначное значение дальности с высокой точностью. Поскольку измерение дальности способом ЛЧМ произведено на частоте повторения F1, вторую частоту F2 выбирают из условия однозначного определения дальности на интервале 2 • Δ Д:
другими словами, на интервале 2 • Δ Д число периодов повторения, соответствующих F2, на 1 меньше числа периодов, соответствующих F1.
Но поскольку необходимая максимальная дальность при работе РЛС в режиме СНП значительно превышает величину интервала 2 • Δ Д, измеренное значение дальности с помощью двух частот повторения будет в действительности неоднозначным. Истинная дальность может быть представлена в виде
Ди = Днеодн + n • Tдевиац,
где Днеодн - неоднозначная дальность на частоте девиации F1 - F2, период которой Tдевиац =  равен интервалу точности 2 • Δ Д;
равен интервалу точности 2 • Δ Д;
n - наибольшее число периодов девиации, при котором дальность, кратная указанному числу периодов девиации n • Tдевиац, не превышает ДЛЧМ.
Измерение дальности с помощью ЛЧМ позволяет определить значение n • Tдевиац, а использование двух частот повторения позволяет определить значение Днеодн с высокой точностью.
Перейдя к обозначениям, принятым в описании прототипа, заметим, что истинной дальности до цели соответствует задержка во время tц, которую можно вычислить по формуле
где  целая часть,
целая часть,  целая часть - число периодов повторения в интервале от 0 до ДЛЧМ для каждой частоты F1 и F2
целая часть - число периодов повторения в интервале от 0 до ДЛЧМ для каждой частоты F1 и F2
K1; K2 - число периодов повторения, соответствующих смещению дальности, измеренной способом ЛЧМ, относительно истинной дальности до цели (для F1 и F2 соответственно).
Существует два соотношения между K1 и K2:
K1 = K2, K1 + 1 = K2
Подставляя эти соотношения в (5), получим формулы для определения задержки во времени
 (7)
(7)
За истинную дальность принимается значение tц, которое находится в ограниченном интервале точности Δ Д.
В выражении (6) и (7) первые слагаемые представляют собой наибольшую дальность, не превышающую ДЛЧМ, кратную периоду девиации частот (F1 - F2), а вторые слагаемые являются неоднозначной дальностью на периоде девиации частот F1 и F2.
Точность определения дальности tц обусловлена точностью определения Днеодн двухчастотным способом, т. к. входящие в первое слагаемое величины ДЛЧМ, F1, F2 точно известны.
Таким образом, из формул (6), (7) видно, что сочетание операций двух способов - ЛЧМ и двухчастотного, и выбор второй частоты повторения излучаемых импульсов из соотношения F2 = F1 -  позволяет во всем диапазоне возможных значений дальности за минимальное время получить оценку дальности с точностью измерения дальности двухчастотным способом, которая сравнима с точностью измерения, свойственной импульсной радиолокационной станции, применяющей импульсы такой же длительности (см. "Бортовые радиолокационные системы"./ под ред. Повейсила и др., Воениздат, М., 1964 г., стр. 321).
позволяет во всем диапазоне возможных значений дальности за минимальное время получить оценку дальности с точностью измерения дальности двухчастотным способом, которая сравнима с точностью измерения, свойственной импульсной радиолокационной станции, применяющей импульсы такой же длительности (см. "Бортовые радиолокационные системы"./ под ред. Повейсила и др., Воениздат, М., 1964 г., стр. 321).
На чертеже представлена упрощенная блок-схема устройства, реализующего предлагаемый способ, причем область вне пунктирного прямоугольника соответствует реализации устройства прототипа, а внутри - соответствует вновь вводимым блокам, определенная взаимосвязь между всеми блоками позволяет реализовать предлагаемый способ.
1 - передатчик,
2 - синхронизатор,
3 - управляемый гетеродин,
4 - антенна с антенным переключателем,
5 - приемник,
6-1, 6-2, ..., 6-N - стробируемые усилители,
7-1, 7-2, ..., 7-N - наборы параллельных доплеровских фильтров, каждый из которых содержит детектор и накопитель,
8-1, 8-2, ..., 8-N - переключаемые пороговые устройства,
9 - дальномер,
10 - угломер,
11 - индикатор,
12 - первая логическая схема "ИЛИ" на N-входов,
13 - вторая логическая схема "ИЛИ" на N-входов,
14 - счетчик с дешифратором,
15 - преобразователь "временной интервал - код",
16 - преобразователь "код - временной интервал",
17 - блок измерения положения цели,
18 - устройство памяти,
19 - вычислитель неоднозначной дальности,
20 - вычислитель дальности ЛЧМ,
21 - вычислитель целой части числа периодов,
22 - вычислитель второй частоты повторения,
23 - вычислитель истинной дальности.
Приведенное в качестве примера реализации устройство работает следующим образом.
Работа РЛС разделена на такты, длительность которых определяется временем когерентного накопления сигнала.
Внутри такта параметры излучаемого импульса и его частота повторения (ЧПМ) остаются неизменными. Импульс запуска передатчика 1, задаваемый синхронизатором 2, поступает в передатчик, на второй вход которого поступает выходное напряжение управляемого гетеродина 3.
До обнаружения цели выходная частота гетеродина 3 постоянна и выходной импульс передатчика, излучаемый антенной 4, не имеет ЛЧМ несущей частоты.
При наличии цели в 1-м такте отраженный от нее сигнал, имеющий доплеровское смещение частоты, пропорциональное радиальной составляющей скорости сближения носителя РЛС и цели через антенну 4, поступает в приемник 5, на второй вход которого поступает напряжение гетеродина 3. После гетеродинирования сигнал с выхода приемника поступает на входы N стробируемых каналов, каждый из которых состоит из последовательно соединенных стробируемых усилителей 6-1, 6-2, ..., 6-N, набора параллельных доплеровских фильтров, содержащих детекторы и накопители 7-1, 7-2, ..., 7-N, выходы которых последовательно опрашиваются переключаемым пороговым устройством 8-1, 8-2, ..., 8-N.
Стробирование каналов осуществляется стробами, поступающими от синхронизатора 2 на вторые входы стробируемых усилителей 6-1, 6-2, ..., 6-N. Переключение порогового устройства производится с помощью гребенки импульсов опроса, поступающих с выхода "b" синхронизатора 2.
В каждом канале при превышении порога на выходе b1, b2, ..., bN переключаемого порогового устройства фиксируется номер импульса опроса, соответствующий номеру фильтра Nф, в котором произошло обнаружение цели. Сигнал обнаруженной цели с выхода a1, a2, ..., aN порогового устройства поступает на индикатор 11 и блок измерения положения цели 17. Выходное напряжение на выходе блока 17 пропорционально задержке цели от ближайшего слева зондирующего импульса.
На выходе C1, C2, ..., CN порогового устройства в случае превышения порога возникает сигнал, поступающий через схему "ИЛИ" 13 на вход счетчика с дешифратором 14, на 3-х выходах которого формируются раздельно 1-й, 2-й и 3-й импульсы управления, соответствующие последовательным тактам работы РЛС.
При возникновении 1-го импульса управления в устройстве памяти 18 производится запоминание следующих параметров: номера "звенящего" фильтра (Nф1) через логическую схему "ИЛИ" 18, временной задержки эхо-сигнала t1 с выхода блока 17, частотные повторения F1, поступающей с выхода "a" синхронизатора 2 через преобразователь "временной интервал - код" 15. Кроме того, запускается вычислитель 22, содержащий делитель и вычитающее устройство, рассчитывающий частоту повторения F2 = F1 -  , и в синхронизаторе 2 в следующем тактовом интервале формируется строб ЛЧМ, поступающий с выхода "d" синхронизатора на вход управляемого гетеродина 3. С выхода "c" синхронизатора на вход передатчика 1 поступает импульс запуска передатчика с ЧПИ F1.
, и в синхронизаторе 2 в следующем тактовом интервале формируется строб ЛЧМ, поступающий с выхода "d" синхронизатора на вход управляемого гетеродина 3. С выхода "c" синхронизатора на вход передатчика 1 поступает импульс запуска передатчика с ЧПИ F1.
Во 2-м такте РЛС работает с ЧПИ F1 и ЛЧМ несущей частоты. При наличии 2-го импульса управления в устройстве памяти 18 производится запоминание второго номера "звенящего" фильтра (Nф2) и вычислитель 20, содержащий умножитель, вычислитель и делитель, производит расчет дальности ДЛЧМ =  , где S и K - константы. При возникновении 2-го импульса управления, в следующем тактовом интервале на вход синхронизатора поступает значение частоты F2 с выхода вычислителя 22 через преобразователь "код - временной интервал" 16, и на выходе "d" синхронизатора не формируется строб ЛЧМ, благодаря чему гетеродин 3 формирует неизменную несущую частоту. С выхода "C" синхронизатора на вход передатчика 1 поступает импульс запуска с ЧПИ F2.
, где S и K - константы. При возникновении 2-го импульса управления, в следующем тактовом интервале на вход синхронизатора поступает значение частоты F2 с выхода вычислителя 22 через преобразователь "код - временной интервал" 16, и на выходе "d" синхронизатора не формируется строб ЛЧМ, благодаря чему гетеродин 3 формирует неизменную несущую частоту. С выхода "C" синхронизатора на вход передатчика 1 поступает импульс запуска с ЧПИ F2.
В 3-м такте РЛС работает с ЧПИ F2 без ЛЧМ несущей частоты. Прохождение сигналов по блокам РЛС аналогично 1-му такту. При возникновении 3-го импульса управления производится запоминание временной задержки отраженного сигнала t2 с выхода блока 17 и последовательно запускаются в работу вычислители 19, 21 и 23.
Блок 21 производит вычисление целой части n1 и n2 частного - от деления ДЛЧМ на F1 и F2 соответственно. Блок 19, содержащий 2 умножителя, 2 вычитающих устройства и делитель, вычисляет неоднозначную дальность
На выходе блока 23, содержащего 2 вычитающих устройства, делитель и сумматор, образуется напряжение истинной дальности в соответствии с формулой:
Устройство описано выше как комбинированное, хотя оно может быть выполнено и как цифровое.
Предложенный способ и приведенное в качестве примера устройство обладает принципиальным отличием от известных способов измерения дальности в режиме обзора, состоящим в высокой точности измерения дальности в условиях ограниченного времени радиолокационного контакта с целью при применении РЛС с высокой частотой повторения импульсов.
Эффективность предлагаемого способа измерения однозначной дальности проверялась с помощью математического моделирования. Модель включала в себя блок формирования входного сигнала, блок формирования смеси сигнал/шум на выходе линейного приемника в каждом из временных стробов приемного канала и блок вычисления дальности, работающий по предлагаемому способу. Блок формирования сигнала выдавал случайные реализации сигнала с заданной частотой повторения с начальной дальностью, равномерно распределенной на отрезке дистанции, равной 12 км. В блоке приемника этот сигнал складывался со случайной реализацией шума, распределенного по нормальному закону, причем соотношение сигнал/шум варьировалось в заданных пределах от одной серии статистических испытаний к другой. В блоке измерения однозначной дальности использовался однопороговый обнаружитель сигнала, причем уровень порога соответствовал заданному значению вероятности ложной тревоги. Точность измерения однозначной дальности оценивалась путем статистической обработки серии случайных результатов, полученных при математическом моделировании процесса обработки сигнала.
Полученные результаты показали, что при четырех стробах в зоне приема, начальной точности ± 6 км (полученной на первом этапе измерения однозначной дальности с помощью ЛЧМ), соотношении сигнал/шум на входе измерителя, равном 17 дБ (7 раз), величине порога обнаружения, равной 4,5 σш , вероятность измерения с ошибкой / δ / < 300 м составляет P = 0,6, с ошибкой / δ / = 300 - 600 м P = 0,33, с ошибкой / δ / = 600 - 900 м P = 0,043.
Таким образом, показано, что предлагаемый способ обеспечивает достижение поставленной цели: повышение точности измерения дальности в условиях ограниченного времени радиолокационного контакта с целью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ | 2005 |
|
RU2296346C2 |
| КОДОВЫЙ ДАЛЬНОМЕР ДЛЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1999 |
|
RU2149422C1 |
| МОДАЛЬНЫЙ ДАЛЬНОМЕР ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2004 |
|
RU2277714C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1981 |
|
RU2081432C1 |
| ИЗМЕРИТЕЛЬ АЗИМУТА | 1997 |
|
RU2117958C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И РАДИАЛЬНОЙ СКОРОСТИ В РЛС С ЗОНДИРУЮЩИМ СОСТАВНЫМ ПСЕВДОСЛУЧАЙНЫМ ЛЧМ ИМПУЛЬСОМ | 2014 |
|
RU2553272C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО НЕСКОЛЬКИХ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКИМИ РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ СО СРЕДНЕЙ ЧАСТОТОЙ ПОВТОРЕНИЯ ИМПУЛЬСОВ | 2002 |
|
RU2221258C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ЦЕЛИ ПО СКОРОСТИ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314552C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
Изобретение относится к радиолокации и используется для измерения дальности. Способ измерения дальности заключается в излучении импульсных сигналов с частотой повторения F1, приеме отраженных сигналов и измерении их доплеровской частоты f1, последующем излучении сигнала с линейно-частотной модуляцией (ЛЧМ) несущей частоты с крутизной S, приеме отраженного ЛЧМ сигнала, измерении разности частот f2 между излучаемым и принимаемым ЛЧМ сигналами, измерении задержки отраженных импульсных сигналов t1 на частоте повторения, излучении импульсных сигналов с частотой повторения F2, равной  , приеме отраженных сигналов и измерении их задержки t2, а дальность определяют по формуле
, приеме отраженных сигналов и измерении их задержки t2, а дальность определяют по формуле
Технический результат заключается в повышении точности измерения дальности. 1 ил.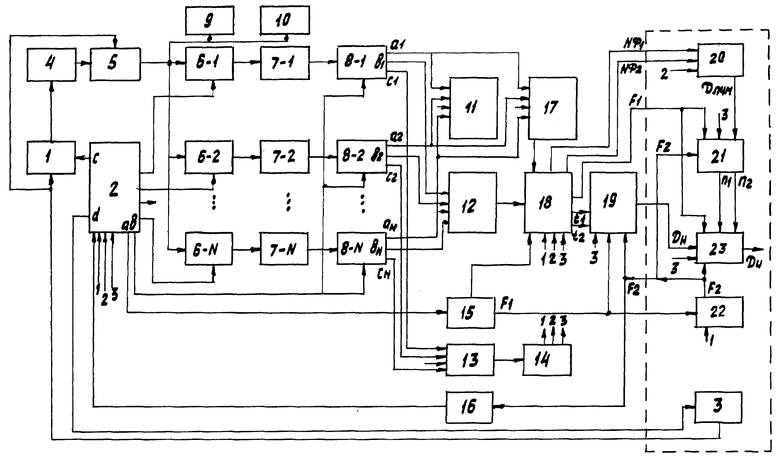
Способ измерения дальности, включающий излучение импульсных сигналов с частотой повторения F1, прием отраженных импульсных сигналов и измерение их доплеровской частоты f1, последующее излучение сигнала с линейно-частотной модуляцией /ЛЧМ/ несущей частоты с крутизной S, прием отраженного ЛЧМ сигнала, измерение разности частот f2 между излучаемым и принимаемым ЛЧМ сигналами и определение дальности Д по формуле
где С - скорость света, отличающийся тем, что, с целью повышения точности измерения дальности, измеряют задержку отраженных импульсных сигналов t1 на частоте повторения F1, дополнительно излучают импульсные сигналы с частотой повторения F2, равной  , где ΔД - максимально возможная ошибка измеренного значения дальности, принимают отраженные сигналы и измеряют их задержку t2, а истинную дальность Дист определяют по формуле
, где ΔД - максимально возможная ошибка измеренного значения дальности, принимают отраженные сигналы и измеряют их задержку t2, а истинную дальность Дист определяют по формуле
где [ • ] означает целую часть числа.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бортовые радиолокационные системы | |||
| /Под ред | |||
| Повейсила Д | |||
| - М.: Воениздат МО СССР, 1964, с.317-320 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Справочник по радиолокации | |||
| /Под ред.Сколника М | |||
| - М.: Сов.радио, 1979, с.383 (прототип). | |||
