Устройство относится к силовой преобразовательной технике и может использоваться для управления реверсивными тиристорными преобразователями с раздельным управлением.
Датчики нулевого тока (ДНТ) применяются в реверсивных тиристорных преобразователях (ТП) с раздельным управлением, входят в состав логических переключающих устройств и предназначены для формирования разрешающего логического сигнала («0» или «1») на переключение групп силовых вентилей «Вперед» и «Назад» и управления переключателями характеристик.
Известен датчик нулевого тока компараторного типа (Чернов Е.А., Кузьмин В.П. Комплектные электроприводы станков с ЧПУ. Справочное пособие. - Горький: Волго-Вятское книжное издательство, 1989. - 320 с). Гистерезисная характеристика формируется цепью положительной обратной связи операционного усилителя с помощью резисторов. На инвертирующий вход усилителя подается сигнал смещения от потенциометра, через резистор и стабилитрон, и сигнал, пропорциональный току якоря IЯ электродвигателя. Для преобразования биполярного выходного сигнала усилителя служит транзисторный каскад на резисторах, диоде и транзисторе. Формирование фронтов выходных импульсов ДНТ и его согласование с последующими логическими схемами управления вентильного преобразователя осуществляется с помощью инвертора.
В случае, когда входной сигнал ДНТ превышает порог включения b2, усилитель находится в «отрицательном» состоянии и на выходе инвертора формируется сигнал логического «0», запрещающий подачу импульсов управления на неработающую группу силовых вентилей ТП. При входном сигнале, меньшем порога выключения b1, усилитель переключается в противоположное состояние, и на выходе ДНТ появляется сигнал логической «1», при котором разрешается включение ранее не функционирующей группы силовых тиристоров ТП.
Недостатком известного ДНТ является его низкая помехоустойчивость к импульсным помехам, что характерно для компараторных устройств в целом. Включение дополнительных фильтров на информационном входе ДНТ зачастую не приводит к желаемому результату, т.к. импульсные помехи могут проникать на вход компаратора через дополнительные паразитные емкостные или индуктивные связи в каналах передачи данных, что приводит к его ложным переключениям.
Наиболее близким к предлагаемому устройству является развертывающий преобразователь (РП) (SU №1451729 от 15.01.89, бюл. №2).
В состав устройства входят сумматоры, интеграторы, релейные элементы, делители частоты, пропорционально-дифференцирующие звенья, демодуляторы, ключи, источники электропитания.
Известный РП представляет собой трехкратно резервируемую систему с параметрическим диагностированием, которое основано на контроле за фактом существования в каналах РП режима устойчивых автоколебаний. При его срыве дается команда на включение резервного канала регулирования.
Данный РП может работать в качестве датчика нулевого тока, однако при этом он будет обладать недостаточно высокой точностью из-за задержки выхода операционного усилителя интегратора из режима насыщения.
В основу изобретения положена техническая задача, заключающаяся в повышении точности работы датчика нулевого тока.
Указанная задача решается тем, что в датчик нулевого тока, содержащий последовательно включенные источник сигнала управления, первый четырехполюсник, сумматор, интегратор, первый релейный элемент, выход которого через второй четырехполюсник подключен ко второму входу сумматора, последовательно включенные пропорционально-дифференцирующее звено, демодулятор, согласно изобретению последовательно с демодулятором включены сглаживающий фильтр, второй релейный элемент, выход которого подключен к выходной клемме, и введено нелинейное звено с зоной нечувствительности, вход которого подключен к выходу интегратора, а выход соединен с третьим входом сумматора, при этом вход пропорционально-дифференцирующего звена соединен с выходом первого релейного элемента.
Поставленная техническая задача достигается за счет введения нелинейного звена с зоной нечувствительности, предотвращающего режим насыщения операционного усилителя интегратора и подключения входа пропорционально-дифференцирующего звена к выходу первого релейного элемента, что исключает необходимость в делителе частоты и повышает динамическую точность работы устройства.
Изобретение поясняется следующими чертежами:
Фиг.1 - структурная схема предлагаемого ДНТ;
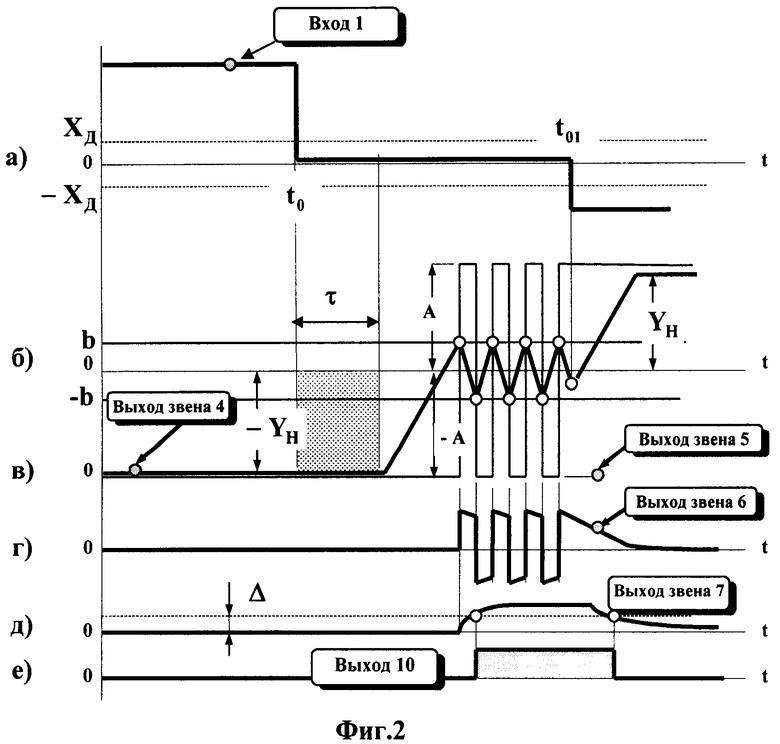
Фиг.2а, б, в, г, д, е - временные диаграммы предлагаемого ДНТ;
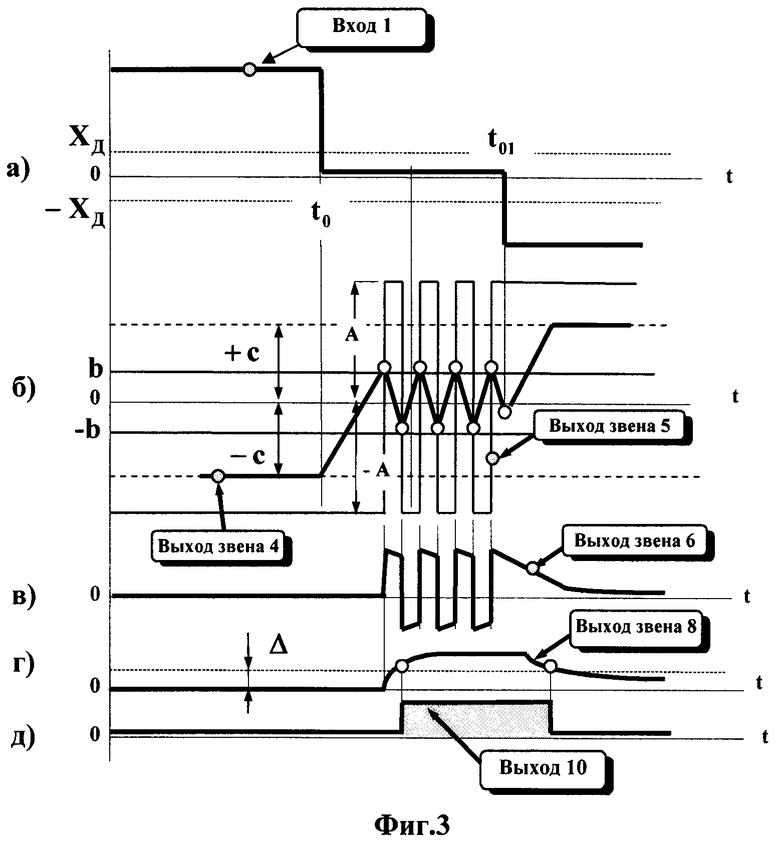
Фиг.3а, б, в, г, д - временные диаграммы предлагаемого ДНТ.
В состав ДНТ (фиг.1) входят последовательно включенные источник сигнала управления 1, первый четырехполюсник 2, сумматор 3, интегратор 4, первый релейный элемент 5, пропорционально-дифференцирующее звено 6, демодулятор 7, сглаживающий фильтр 8, второй релейный элемент 9, «выход» датчика нулевого тока 10. Также ДНТ содержит нелинейное звено 11, вход которого подключен к выходу интегратора 4, а выход - к третьему входу сумматора 3, второй четырехполюсник 12, вход которого подключен к выходу первого релейного элемента 5, а выход - ко второму входу сумматора 3.
Звенья ДНТ реализуют следующие характеристики.
Сумматор 3 имеет единичный коэффициент передачи по каждому из входов. Интегратор 4 выполнен на операционном усилителе с передаточной функцией W(p)=l/Tиp, где Ти - постоянная времени интегрирования. Знак выходного напряжения интегратора 4 инвертирован по отношению к его входному воздействию. Максимальное выходное напряжение интегратора 4 соответствует величине ±A. Релейный элемент 5 имеет симметричную относительно «нуля» неинвертирующую петлю гистерезиса с порогами переключения ±b. Выходной сигнал релейного элемента 5 изменяется дискретно в пределах ±A. Пропорционально-дифференцирующее звено 6 реализует передаточную функцию вида W(p)=Т1р/(Т2р+1), где Т1, Т2 - постоянные времени. Демодулятор 7 выполнен с единичным коэффициентом передачи и осуществляет выпрямление переменного сигнала с выхода блока 6. Фильтр 8 - апериодический первого порядка имеет постоянную времени Т и предназначен для сглаживания пульсаций выходного сигнала демодулятора 7. Второй релейный элемент имеет безгистерезисную характеристику с порогом включения +Δ. Нелинейное звено 11 обладает зоной нечувствительности ±c, при превышении которой его выходной сигнал «неограниченно» возрастает. Четырехполюсники 2, 12 являются резистивными и определяют коэффициент пропорционального усиления канала, содержащего звенья 3, 4, 5. Принцип работы устройства следующий.
Звенья 2, 3, 4, 5, 12 в совокупности образуют автоколебательную систему с частотно-широтно-импульсной модуляцией. Амплитуда выходного пилообразного напряжения интегратора 4 ограничивается величиной порогов переключения ±b релейного элемента 5, а среднее значение выходных импульсов пропорционально величине входного сигнала. Режим автоколебаний сохраняется в случае, когда входной сигнал на клемме 1 удовлетворяет условию |Xвх|<(XД=|А/Кп|), где:Xвх - амплитуда сигнала на клемме 1; ±Xд - допустимая величина входного сигнала, при котором система работает в режиме устойчивых автоколебаний; ±A - амплитуда выходных импульсов релейного элемента 5; Кп - коэффициент пропорционального усиления, определяемый соотношением параметров звеньев 2, 12 (в предлагаемом устройстве Кп≥300). Таким образом, блоки 2, 3, 4, 5, 12 по существу представляют собой усилитель постоянного тока с высоким значением коэффициента передачи.
Клемма 1 подключается к выходу датчика тока в цепи нагрузки ТП. Как только напряжение на клемме 1 достигает величины |Xвх|>Xд (фиг.2а, сигнал Xвх принят положительным), интегратор переходит в состояние «насыщения» -YH=-А (фиг.2б), при котором автоколебательный процесс срывается и система оказывается в статическом положении. В результате выходное напряжение блоков 6, 7, 8, 9 равно нулю (фиг.2 г-е). Тем самым ДНТ формирует команду запрета на включение второй группы силовых тиристоров ТП.
При уменьшении в момент времени t0 входного сигнала на клемме 1 до нуля (фиг.2а) интегратор 4 выходит из «насыщения» (фиг.2б) и через определенный промежуток времени в системе вновь возникает режим автоколебаний, когда на выходе релейного элемента 5 формируется поток импульсов со средним нулевым значением (фиг.2б). Параметры блока 6 выбираются таким образом, чтобы частота выходных импульсов релейного элемента 5 соответствовала бы пропорциональному участку его частотной характеристики. В этом случае выходной сигнал блока 6 поступает на вход демодулятора 7 практически с минимальными искажениями (фиг.2г). С помощью блока 7 импульсы выпрямляются и дополнительно сглаживаются фильтром 8 (фиг.2д). Как только сигнал на выходе звена 8 превышает величину А, релейный элемент 9 переключается в состояние «1», разрешая тем самым переключение на другую группу силовых вентилей ТП.
При изменении знака сигнала на клемме 1 (фиг.2а, момент времени t01) интегратор 4 переходит в положение +Yн, автоколебания прекращаются и релейный элемент 9 вновь переключается в состояние «0» (фиг.2б-е).
Недостатком данного технического решения является то, что выход интегратора 4 из состояния «насыщения» происходит с задержкой «τ» (фиг.2б), определяемой временем рассасывания носителей в транзисторных каскадах операционного усилителя. При этом τ зависит от величины сигнала ошибки на входе интегратора 4, температуры окружающей среды, а также изменяется с течением времени. Данный фактор вносит значительную ошибку в работу ДНТ, т.к. «τ» может достигать величины единиц миллисекунд, что соизмеримо с величиной бестоковой паузы в ТП, исчисляемой 4-7 мс.
Для исключения данного фактора и повышения точности работы ДНТ в схему введено нелинейное звено 11. Его пороговый уровень соответствует значению |±с|<|±Yн|. При этом устройство работает следующим образом.
При увеличении входного сигнала на клемме 1 выше уровня ±Xд (фиг.3а) выходное напряжение интегратора 4 стремится к величине ±Yн. Однако, как только сигнал на выходе интегратора 4 достигает соответствующего из порогов ±с (фиг.3б), происходит включение звена 11, что влечет за собой ограничение сигнала ошибки интегратора 4 и ограничение его выходного напряжения на уровне порогов срабатывания звена 11. Тем самым исключается режим «насыщения» транзисторов операционного усилителя интегратора 4 и влияние времени «τ» на работу ДНТ (фиг.3в-е), т.е. повышается точность работы устройства. Учитывая также тот фактор, что при входе ДНТ в режим устойчивых автоколебаний на выходе релейного элемента 5 формируются импульсы со средним нулевым значением, из схемы исключен делитель частоты, который присутствует в устройстве-прототипе. При этом вход звена 6 подключен непосредственно к выходу релейного элемента 5. В результате повышается динамическая точность работы устройства, т.к. частота выходных импульсов релейного элемента 5 сдвинута вправо по оси частот частотной характеристики пропорционально-дифференцирующего звена 6.
Таким образом, предложенный ДНТ отличается повышенной точностью и помехоустойчивостью. В предложенном устройстве (фиг.1) импульсная помеха для того, чтобы принудительно переключить релейный элемент 5, должна преодолеть канал интегрирования 4, что, с практической точки зрения, маловероятно. Исключение фактора «τ» обеспечивает независимость режимов работы ДНТ от температуры и времени.
Промышленная применимость.
Рассмотренное устройство предполагается использовать в реверсивном тиристорном преобразователе с раздельным управлением в системе управления электроприводами калибровочного стана цеха №2 ОАО «Челябинский трубопрокатный завод».
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛОГО-ЦИФРОВОЙ ДАТЧИК НУЛЕВОГО ТОКА | 2011 |
|
RU2460134C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2449470C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОПРИВОДОВ С ПАРАЛЛЕЛЬНЫМИ КАНАЛАМИ РЕГУЛИРОВАНИЯ | 2014 |
|
RU2565598C1 |
| МНОГОЗОННЫЙ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПЕРЕДАЧИ ЛОГИЧЕСКИХ ДАННЫХ ПО ОДНОПРОВОДНОЙ ЛИНИИ СВЯЗИ | 2001 |
|
RU2206922C2 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР | 2014 |
|
RU2546084C1 |
| ФИЛЬТР С ДИСКРЕТНО ПЕРЕСТРАИВАЕМЫМИ ХАРАКТЕРИСТИКАМИ | 2006 |
|
RU2317636C1 |
| СИСТЕМА ИМПУЛЬСНО-ФАЗОВОГО УПРАВЛЕНИЯ | 2003 |
|
RU2248659C2 |
| УСТРОЙСТВО ДЛЯ ПОТЕНЦИАЛЬНОГО РАЗДЕЛЕНИЯ ЦЕПЕЙ ПОСТОЯННОГО ТОКА | 2011 |
|
RU2469392C1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2471282C1 |
Устройство относится к силовой преобразовательной технике и может использоваться в системах управления реверсивными тиристорными преобразователями с раздельным управлением. Технический результат заключается в повышении точности работы за счет введения нелинейного звена. Датчик нулевого тока содержит последовательно включенные источник сигнала управления, первый четырехполюсник, сумматор, интегратор, первый релейный элемент, выход которого через второй четырехполюсник подключен ко второму входу сумматора, последовательно включенные пропорционально-дифференцирующее звено, демодулятор, сглаживающий фильтр, второй релейный элемент, выход которого подключен к выходной клемме. В устройство также введено нелинейное звено с зоной нечувствительности, вход которого подключен к выходу интегратора, а выход соединен с третьим входом сумматора, при этом вход пропорционально-дифференцирующего звена соединен с выходом первого релейного элемента. 3 ил.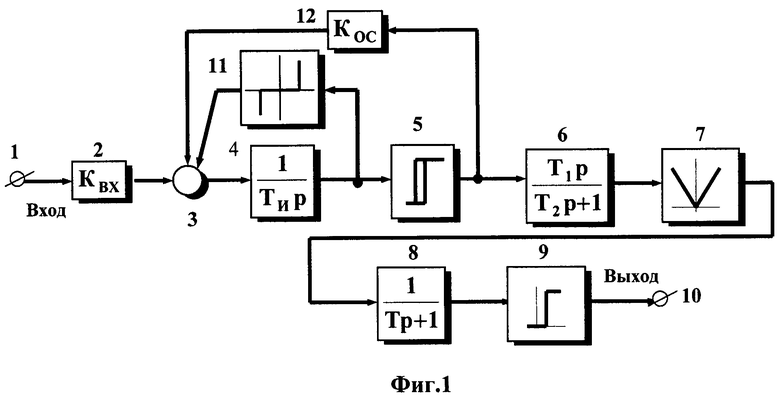
Датчик нулевого тока, содержащий последовательно включенные источник сигнала управления, первый четырехполюсник, сумматор, интегратор, первый релейный элемент, выход которого через второй четырехполюсник подключен ко второму входу сумматора, последовательно включенные пропорционально-дифференцирующее звено, демодулятор, отличающийся тем, что последовательно с демодулятором включены введенные сглаживающий фильтр и второй релейный элемент, выход которого подключен к выходной клемме, а также введено нелинейное звено с зоной нечувствительности, вход которого подключен к выходу интегратора, а выход соединен с третьим входом сумматора, при этом вход пропорционально-дифференцирующего звена соединен с выходом первого релейного элемента.
| Развертывающий преобразователь | 1987 |
|
SU1451729A1 |
| Датчик постоянного тока | 1972 |
|
SU440756A1 |
| Устройство для гальваническогоРАздЕлЕНия цЕпЕй пОСТОяННОгО TOKA | 1979 |
|
SU840939A1 |
| Многозонный развертывающий преобразователь | 1987 |
|
SU1439627A1 |

