Изобретение относится к области преобразовательной техники и может быть использовано для управления тиристорными регуляторами напряжения, например, для плавного пуска асинхронных электроприводов.
Известны системы импульсно-фазового управления (СИФУ), выполненные на основе канала синхронизации, генератора пилообразного напряжения, сумматора, формирователя управляющих импульсов (Управление вентильными электроприводами постоянного тока / Лебедев Е.Д., Неймарк В.Е., Пистрак П.Я., Слежановский О. В. - М.: Энергия, 1970. - 199 с.). Данные СИФУ относятся к классу систем с "вертикальным" управлением, характеризуются низкой помехоустойчивостью и надежностью в работе.
Известен интегрирующий развертывающий преобразователь (а.с. СССР 515117, G 06 G 7/12. Релейный операционный усилитель / Суворов Г.В., Осипов О.И., Цытович Л. И. , Маурер В.Г. (СССР). - 2055243/24, заявлено 20.08.74; опубл. 25.05.76, Бюл. 19), содержащий последовательно включенные интегратор и релейный элемент, выход которого через резистор соединен с выходом интегратора, в цепи обратной связи которого включены последовательно соединенные нелинейный элемент с зоной нечувствительности и дифференцирующее звено. Преобразователь работает в режиме устойчивых автоколебаний и обладает повышенной помехоустойчивостью за счет дискретного изменения постоянной времени интегратора при воздействии на информационный вход сигнала синхронизирующей помехи.
Недостатком устройства являются его ограниченные функциональные возможности, так как он может быть использован только для управления частотно-широтно-импульсными преобразователями.
Наиболее близким к предлагаемому устройству является СИФУ (а.с. СССР 873374, Н 02 P 13/16. Устройство для импульсно-фазового управления вентильным преобразователем / Гафиятуллин Р.Х., Суворов Г.В., Цытович Л.И., Осипов О.И. и др. (СССР). - 2680999/07, заявлено 02.11.78; опубл. 15.10.81, Бюл. 38).
В состав устройства-прототипа входят интегрирующие автоколебательные преобразователи, синхронизированные с соответствующей фазой напряжения сети, сумматоры, источник сигнала задания, формирователи управляющих импульсов. Функции фазосдвигающих устройств выполняют автоколебательные преобразователи на основе последовательно соединенных интегратора и релейного элемента, выход которого подключен к формирователю управляющих импульсов и входу интегратора.
При работе в режиме внешней синхронизации фазосдвигающие устройства приобретают свойства апериодического фильтра первого порядка
с постоянной времени
пропорциональной амплитуде  и периоду ТC напряжения сети, где А - амплитуда выходных импульсов релейного элемента (Цытович Л.И. Развертывающий операционный усилитель с перестраиваемой полосой пропускания. // Приборы и техника эксперимента. - М.: АН СССР, 1979.- 4.- С. 149-152).
и периоду ТC напряжения сети, где А - амплитуда выходных импульсов релейного элемента (Цытович Л.И. Развертывающий операционный усилитель с перестраиваемой полосой пропускания. // Приборы и техника эксперимента. - М.: АН СССР, 1979.- 4.- С. 149-152).
В результате повышенная помехоустойчивость СИФУ приобретается ценой значительного ухудшения ее динамических показателей. Кроме того, в состав СИФУ входят дополнительные и традиционно применяемые функциональные блоки, такие как сумматоры, источники опорного напряжения, генераторы импульсов управления и т.д., что усложняет схему СИФУ и отрицательно сказывается на надежности работы всего тиристорного преобразователя.
Технической задачей изобретения является повышение динамических показателей и надежности работы фазосдвигающего устройства.
Поставленная задача достигается за счет того, что в фазосдвигающее устройство введен генератор импульсов малой длительности, вход которого подключен к выходу компаратора, а выход соединен с пятым входом сумматора.
Предлагаемое фазосдвигающее устройство содержит последовательно включенные компаратор, вход которого соединен с источником напряжения сети, сумматор, интегратор, релейный элемент, выход которого подключен к выходной клемме устройства и соединен со вторым входом сумматора, последовательно соединенные нелинейный элемент с зоной нечувствительности и дифференцирующее звено, причем вход элемента с зоной нечувствительности подключен к выходу интегратора, а выход дифференцирующего звена соединен с третьим входом сумматора, источник сигнала управления, подключенный к четвертому входу сумматора, и отличается от известного фазосдвигающего устройства тем, что в него введен генератор импульсов малой длительности, вход которого подключен к выходу компаратора, а выход соединен с пятым входом сумматора.
Существенным отличием предлагаемого устройства являются его высокие динамические показатели и надежность. При этом поставленная техническая задача в отличие от устройства-прототипа достигается путем работы фазосдвигающего устройства в режиме частичной синхронизации с сетью и установки "нулевых" начальных условий в интеграторе на этапе преобразования входного сигнала в угол управления силовыми тиристорами. В результате в предлагаемом устройстве объединяются функции устройства синхронизации, пропорционального регулятора, фазосдвигающего устройства и генератора импульсов управления силовыми тиристорами. Данное обстоятельство позволяет считать предлагаемое техническое решение соответствующим критерию "существенные отличия".
При исследовании предлагаемого устройства по патентной и научно-технической литературе не выявлены технические решения, содержащие признаки, эквивалентные признакам заявляемого фазосдвигающего устройства и, следовательно, данное техническое решение соответствует критерию "новизна".
Изобретение поясняется следующими чертежами:
фиг.1 - структурная схема фазосдвигающего устройства;
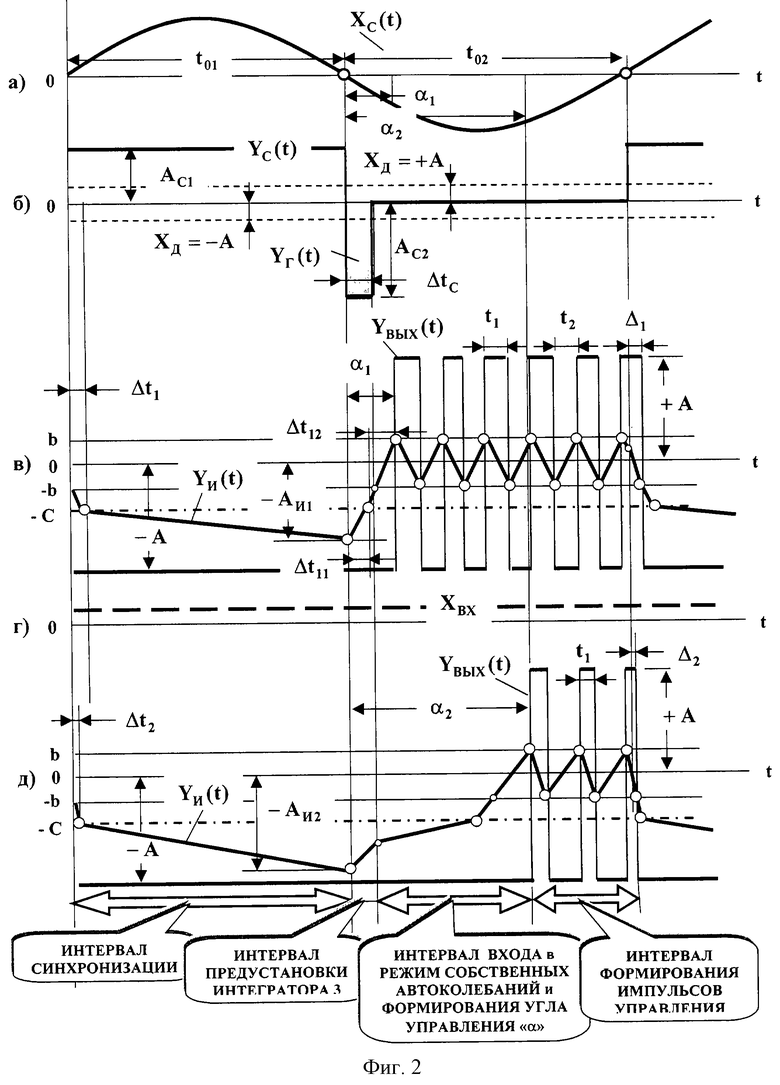
фиг.2 - временные диаграммы сигналов фазосдвигающего устройства;
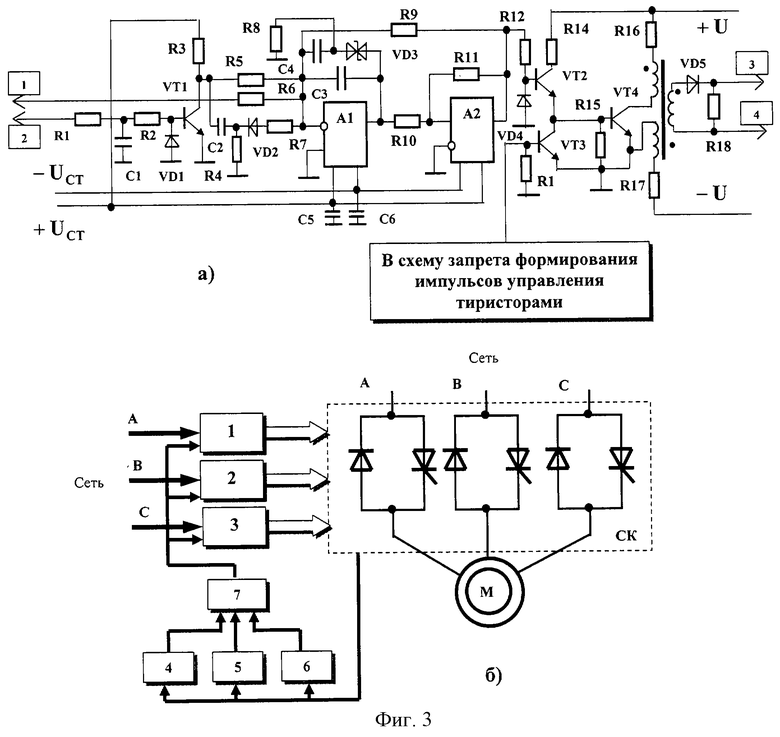
фиг.3 - принципиальная схема фазосдвигающего устройства и функциональная схема тиристорного регулятора напряжения.
В состав устройства (фиг.1) входят компаратор 1, сумматор 2, интегратор 3, релейный элемент 4, дифференцирующее звено 5, нелинейный элемент с зоной нечувствительности 6 и генератор импульсов малой длительности 7.
Компаратор 1 имеет нулевое значение порога переключения и формирует на выходе однополярные импульсы положительной полярности при воздействии на его вход сигнала положительного знака. Сумматор 2 выполнен с коэффициентом передачи, равным 1,0, а его статическая характеристика "вход - выход" линейна во всем диапазоне изменения сигнала управления. Интегратор 3 имеет передаточную функцию вида W(p)=1/TИp, где ТИ - постоянная времени интегрирования. Релейный элемент 4 выполнен с симметричными относительно нулевого уровня порогами переключения ±b и неинвертирующей петлей гистерезиса. Выходной сигнал релейного элемента 4 меняется дискретно в пределах ±А. Дифференцирующее звено 5 реализует передаточную функцию W(p)=T*иp, причем, как правило, постоянная времени дифференцирования T*и>>Tи. Звено 6 имеет зону нечувствительности "-С" и единичный коэффициент передачи. Генератор 7 формирует на выходе импульс отрицательной полярности с заданной амплитудой и длительностью синхронно с задним фронтом выходного импульса компаратора 1.
Принцип работы устройства следующий.
При отсутствии звеньев 1 и 7 устройство представляет собой частотно-широтно-импульсную систему с периодом автоколебаний
где  - нормированная величина порогов переключения звена 4;
- нормированная величина порогов переключения звена 4;  - нормированное значение входного сигнала XВХ; ±А - амплитуда выходных импульсов звена 4. При этом выходные сигналы элементов 5, 6 равны нулю, так как |-C|>|±b|.
- нормированное значение входного сигнала XВХ; ±А - амплитуда выходных импульсов звена 4. При этом выходные сигналы элементов 5, 6 равны нулю, так как |-C|>|±b|.
Рассмотрим работу устройства при условии, что ХВХ=0, а на вход звена 1 подается гармонический входной синхронизирующий сигнал ХС(t) (фиг.2, а), вызывающий появление на выходе компаратора прямоугольных импульсов YC(t) (фиг.2, б) с амплитудой AC1>ХД, где ХД - допустимый уровень входного сигнала устройства, при котором в нем сохраняется режим устойчивых автоколебаний (структура на фиг. 1 имеет единичный коэффициент передачи по каждому из входов сумматора 2, поэтому |Xд| = |A|. Полагаем также, что момент подачи на вход И импульса YC(t) (фиг.2, б) совпадает с моментом переключения релейного элемента 4 в состояние -А, когда сигнал развертки на выходе интегратора 3 YИ(t)=-b (фиг.2, в).
Звенья 5, 6 введены в схему для исключения режима насыщения статической характеристики операционного усилителя интегратора 3 при работе фазосдвигающего устройства в режиме внешней синхронизации, когда выходной сигнал компаратора 1 превышает величину - ХД.
Тогда на интервале времени Δt1 (фиг.2, в) развертка YИ(t) под действием разности сигналов АС1-А (фиг.2, б, в) будет линейно изменяться в отрицательном направлении до тех пор, пока не достигнет порога -С звена 6. При включении нелинейного элемента 6 в цепь обратной связи интегратора 3 включается звено 5. Это приводит к увеличению постоянной времени интегратора 3 и снижению производной сигнала YИ(t) на интервале t01-Δt1 (фиг.2, а, в). В результате за время t01 внешней синхронизации фазосдвигающего устройства выходной сигнал интегратора 3 достигает амплитуды -АИ1. На этом этап синхронизации фазосдвигающего устройства внешним гармоническим воздействием заканчивается.
После изменения знака сигнала XС(t) (фиг.2, а) и выключения компаратора 1 (фиг.2, б) запускается генератор 7, формирующий в течение времени ΔtC импульс YГ(t) отрицательной полярности с амплитудой |AC2|≫AC1 (фиг.2, б). Фазосдвигающее устройство переходит на этап установки "нулевых" условий в интеграторе 3. При этом в течение времени Δt11 темп нарастания сигнала YИ(t) определяется постоянными времени TИ и T*и, а в интервале Δt12 зависит от собственной постоянной времени интегратора 3 (фиг.2 в). После этого устройство входит в режим собственных автоколебаний с частотой, намного превышающей частоту гармонического сигнала XС(t), формируя тем самым "пакет" импульсов управления силовым тиристором. Так как ХВХ=0, интервалы t1=t2, а выходной сигнал интегратора 3 ограничен по амплитуде порогами переключения релейного элемента 4. Начальный угол управления силовым тиристором составляет α1 (фиг. 2, а, в).
При наличии входного сигнала XВХ>0 (фиг.2, г) интервал Δt1 (фиг.2, в) уменьшается до значения Δt2 (фиг.2, д), а сигнал YИ(t) за интервал синхронизации t01, достигает амплитуды |AИ2|>|AИ1| (фиг.2, в, д), так как на вход интегратора действует результирующий сигнал AC1+ХВХ-А (фиг.2, б, г, д). На интервале ΔtC и далее до момента времени выполнения условия YИ(t)≥-С (фиг.2, б, д) происходит снижение амплитуды развертки YИ(t) с производной, меньшей, чем в случае ХВХ=0 (фиг.2, в), что обусловлено наличием на входе фазосдвигающего устройства постоянной составляющей ХВХ. В результате угол управления увеличивается до величины α2 (фиг.2, а, д). Здесь следует учитывать, что одновременно уменьшается длительность импульса YВЫХ(t) положительной полярности при работе устройства в режиме собственных автоколебаний. Поэтому параметры системы должны выбираться таким образом, чтобы время t1 было достаточным для перевода силового тиристора в открытое состояние.
Начало следующего интервала синхронизации фазосвигающего устройства может происходить с ошибкой по времени Δ1 (фиг.2, в) или Δ2 (фиг.2, д) относительно переднего фронта импульсов YС(t) (фиг.2, б). Однако при достаточно высокой собственной частоте автоколебаний звеньев 2, 3, 4, отличающейся от частоты сигнала синхронизации XС(t), например, на два порядка (5-10 кГц), величины Δ1,Δ2 являются пренебрежимо малыми и существенно не влияют на асимметрию импульсов управления силовыми тиристорами.
Таким образом, этапы развертывающего преобразования в фазосдвигающем устройстве включают следующие характерные режимы (фиг. 2, д):
- интервал синхронизации фазосдвигающего устройства одной из полуволн гармонического воздействия (напряжения сети);
- интервал предустановки в интеграторе 3 "нулевых" начальных условий;
- интервал входа фазосдвигающего устройства в режим собственных автоколебаний;
- интервал собственных автоколебаний, при котором формируются импульсы управления силовыми тиристорами.
В результате, система совмещает в себе функции пропорционального регулятора, устройства синхронизации, фазосдвигающего устройства и формирователя импульсов управления силовыми тиристорами. При этом сигналом задания начального значения угла управления тиристорами служит амплитуда выходного сигнала компаратора 1, что ликвидирует необходимость применения дополнительного источника опорного напряжения. Отмеченные факторы позволяют предельно упростить систему импульсно-фазового управления, сократить количество функциональных элементов и за счет этого повысит ее надежность. Кроме того, работа фазосдвигающего устройства в режиме частичной синхронизации с напряжением сети приводит к тому, что его динамические характеристики определяются частотой собственных автоколебаний интегратора 3 и релейного элемента 4, а не параметрами синхронизирующего воздействия, как это имеет место в устройстве-прототипе. В результате, полоса пропускания фазосдвигающего устройства, как показали экспериментальные исследования, расширяется не менее чем в 3-5 раз.
Таким образом, предложенное техническое решение позволяет расширить функциональные возможности традиционных фазосдвигающих устройств, объединив в нем функции устройства синхронизации, фазосдвигающего устройства, регулятора, генератора "пакета" управляющих импульсов и источника сигнала задания, повысив тем самым надежность работы СИФУ и силового преобразователя в целом. Работа фазосдвигающего устройства в режиме частичной (а не полной, как в устройстве-прототипе) синхронизации с сетью обеспечивает улучшение его динамической точности работы, когда полоса пропускания определяется не параметрами сети, а частотой собственных автоколебаний системы. Решение поставленной задачи достигнуто за счет введения в схему устройства генератора импульсов малой длительности, вход которого соединен с выходом компаратора, а выход подключен к входу сумматора.
Пример технической реализации фазосдвигающего устройства показан на фиг. 3, а.
Компаратор 1 реализован на транзисторе VT1. Интегратор 3 выполнен на операционном усилителе А1 с конденсатором С3 в цепи обратной связи. Функции релейного элемента 4 выполняет регенеративный компаратор на основе усилителя А2. В состав дифференцирующего звена 5 входят конденсатор С4 и резистор R8. Нелинейное звено 6 реализовано на стабисторе VD3. Генератор одиночных импульсов включает в себя дифференцирующую цепь С2 - R4 и диод VD2. Выходной каскад фазосдвигающего устройства включает усилитель мощности VT2, VT4 и цепь запрета формирования импульсов управления на транзисторе VT3. Клемма 1 предназначена для подключения сигнала управления. На вход 2 подается сигнал с выхода синхронизирующего трансформатора. Выходы 3, 4 подключаются к управляющей цепи силового тиристора. Диоды VD1, VD4 ограничивают обратное напряжение на управляющем переходе соответствующего транзистора. Конденсаторы С5, С6 осуществляют фильтрацию помех со стороны источника электропитания. Резистор R17 ограничивает ток перемагничивания импульсного трансформатора. Питание выходных каскадов устройства производится от нестабилизированного источника ±U. Коэффициент передачи схемы по входам автоколебательного каскада Al, A2 равен:
вход 1-КП1 = R9/R6;
выход VT1-КП2 = R9/R5;
выход VD2-КП3 = R9/R7.
Рассмотренное устройство обеспечивает диапазон регулирования от 10 до 150 эл. град. и применено в тиристорных регуляторах напряжения (ТРН) (фиг.3, б) для плавного пуска асинхронных электроприводов гидропрессов цеха 6 ОАО "Челябинский трубопрокатный завод".
В состав ТРН входят фазосдвигающие устройства 1-3 по схеме на фиг.3, а, блок силовых ключей (СК) типа "диод - тиристор", максимально-токовая защита 4, времятоковая защита 5, защита от исчезновения фазного напряжения 6, логический элемент 7 функции "3ИЛИ", а также контур обратной связи по току исполнительного электродвигателя М (на фиг.3, б не показан). При срабатывании любой из защит на выходе блока 7 формируется сигнал "1", транзистор VT3 переходит в открытое состояние, что блокирует подачу на тиристоры импульсов управления.
Технико-экономические показатели от внедрения ТРН с предлагаемым фазосдвигающим устройством рассмотрим на примере гидропресса 3 цеха 6 ОАО ЧТПЗ.
В состав электрооборудования гидропресса рабочий и резервный насосы наполнения по 160 кВт каждый и 6 масляных насосов с приводными электродвигателями 10, 40, 75 (3 шт.) и 130 кВт соответственно.
Режим работы электроприводов до реконструкции - непрерывный с управлением от систем прямого (релейно-контакторного) пуска, имеющих следующие основные недостатки:
- высокий уровень пускового тока электродвигателя, достигающего 10-кратного номинального значения, что требует повышенной мощности трансформаторной подстанции;
- перегрев механических и электротехнических компонентов электродвигателя и резкое сокращение срока его эксплуатации;
- преждевременный выход из строя технологических механизмов;
- износ и сокращение срока службы дорогостоящей релейно-контакторной аппаратуры, которая после распада СССР выпускается за пределами России;
- интенсивное старение дорогостоящих силовых кабельных линий из-за их повышенного нагрева.
В результате за год отказ электрооборудования и технологических механизмов наносил ущерб предприятию на сумму в пределах 200 - 300 тыс. руб.
Традиционный комплекс мероприятий по снижению потока отказов асинхронных электроприводов гидропрессов сводился к сокращению повторно-кратковременных режимов их работы и завышению мощности электродвигателей.
Анализ состояния и режимов работы электроприводов гидропресса показал, что мощность приводных электродвигателей завышена следующим образом:
- насосы наполнения - на 50 кВт или на 45% относительно реально необходимой мощности электропривода;
- масляные насосы (75 кВт - 3 шт.) - завышение мощности на 25 кВт;
- масляный насос (130 кВт) - избыточная мощность 20 кВт.
Таким образом, общее завышение потребляемой мощности электроприводами гидропресса составляет 145 кВт.
Насос наполнения на гидропрессе работает в непрерывном режиме. При этом по технологии производства реально необходимое время работы данного механизма составляет 30 с при паузе между рабочими циклами не менее 1,5 мин.
Таким образом, избыточное потребление средней мощности насосом наполнения составляет 120 кВт при мощности исполнительного электродвигателя 160 кВт. Однако перевод электропривода в повторно-кратковременный режим работы был невозможен из-за недостатков системы прямого пуска.
Результаты обследования объекта показали, что парк асинхронных электродвигателей гидропресса практически на 100% состоит из электродвигателей, электрическая часть которых неоднократно подвергалась ремонту. При этом их кпд не превышает 60%, что более чем на 30% меньше реального кпд нового электродвигателя. Суммарная мощность всех электроприводов гидропресса (без учета резервного насоса наполнения) составляет 565 кВт. Следовательно, избыточное потребление электроприводами электроэнергии по причине послеремонтных ухудшений свойств магнитопровода электродвигателей находится в пределах 170 кВт.
Переоснащение гидропрессов новыми электродвигателями без ТРН бессмысленно, так как в режиме прямого пуска срок службы электроприводов не превышает одного года.
Сокращение затрат на электроэнергию за год работы электропривода определяется из соотношения [руб.],
[руб.],
где N - стоимость одного кВА•ч электроэнергии; РДВ - мощность, потребляемая электродвигателем из сети, кВА; ТС - количество часов в рабочей смене предприятия; D - число рабочих дней в году; tП - длительность выключенного состояния электропривода; Т - период включений электропривода. Считаем N=0,4 руб., ТС=16 ч и D=300 дней. Тогда имеем:
1. Эффективность от перевода насоса наполнения в повторно-кратковременный режим работы составляет 230400 руб. в год.
2. Эффективность от снижения завышенной мощности электродвигателей - 278400 руб. в год.
3. Эффективность от замены парка электродвигателей на новые - 326400 руб. в год. С учетом затрат на приобретение новых электродвигателей реальный экономический эффект за первый год эксплуатации составляет порядка 50000 руб.
4. Эффективность от снижения потока отказов электро- и технологического оборудования и снижения затрат на ремонт и обслуживание - не менее 200000 в год.
5. Результирующий годовой экономический эффект для гидропресса равен 230400+278400+50000+200000=758800 руб.
Срок окупаемости затрат на оснащение электроприводов гидропресса ТРН не превышает 11 месяцев.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЗОННЫЙ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПЕРЕДАЧИ ЛОГИЧЕСКИХ ДАННЫХ ПО ОДНОПРОВОДНОЙ ЛИНИИ СВЯЗИ | 2001 |
|
RU2206922C2 |
| СИСТЕМА ИМПУЛЬСНО-ФАЗОВОГО УПРАВЛЕНИЯ | 2003 |
|
RU2248659C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2003 |
|
RU2251206C2 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2005 |
|
RU2288532C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2006 |
|
RU2312452C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2320071C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2373624C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОПРИВОДОВ | 2005 |
|
RU2276449C1 |
| АДАПТИВНОЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2009 |
|
RU2400910C1 |
| МНОГОЗОННЫЙ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2282245C1 |
Изобретение относится к преобразовательной технике и может использоваться для управления тиристорными регуляторами напряжения, например, для плавного пуска асинхронных электроприводов. Техническим результатом является повышение динамических показателей и надежности работы фазосдвигающего устройства. Устройство содержит компаратор, сумматор, интегратор, релейный элемент, дифференцирующее звено, нелинейный элемент с зоной нечувствительности и генератор импульсов малой длительности. 3 ил.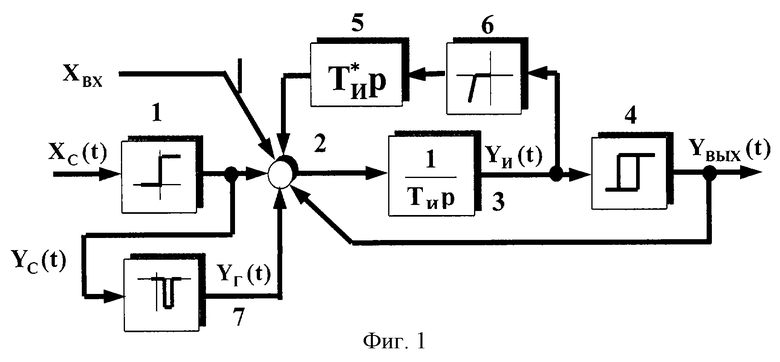
Фазосдвигающее устройство, содержащее последовательно включенные компаратор, вход которого соединен с источником напряжения сети, сумматор, интегратор, релейный элемент, выход которого подключен к выходной клемме устройства и соединен с вторым входом сумматора, последовательно соединенные нелинейный элемент с зоной нечувствительности и единичным коэффициентом передачи, дифференцирующее звено, причем вход элемента с зоной нечувствительности подключен к выходу интегратора, а выход дифференцирующего звена соединен с третьим входом сумматора, источник сигнала управления, подключенный к четвертому входу сумматора, отличающееся тем, что, с целью повышения динамических показателей и надежности работы фазосдвигающего устройства, в него введен генератор импульсов малой длительности, синхронизированный с задним фронтом выходного импульса компаратора и формирующий импульс отрицательной полярности, причем вход генератора импульсов малой длительности подключен к выходу компаратора, а выход соединен с пятым входом сумматора.
| СИСТЕМА УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ АСИНХРОННОГО ДВИГАТЕЛЯ | 1998 |
|
RU2133549C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 1990 |
|
RU2013853C1 |
| Контейнер для гидротермической обработки пакета древесины | 1977 |
|
SU677918A1 |

