Изобретение относится к электромагнитным датчикам перемещения, в частности к перемещениям двух каких-либо объектов относительно друг друга.
Известен патент №2231019, опубликован в Б.И. №17 от 20.06.2004 г. "Индуктивный датчик перемещения", который состоит из первой и второй частей, перемещающихся относительно друг друга, при этом первая часть содержит рамочную передающую антенну, подключенную к источнику переменного электрического тока, рамочную приемную антенну, подключенную к блоку обработки сигналов, а вторая часть датчика индуктивного содержит рамочную приемную антенну, подключенную к нелинейному элементу.
Указанное устройство является наиболее близким по технической сущности к заявляемому изобретению и взято в качестве прототипа.
Недостатком прототипа является малое значение отношения амплитуды полезного сигнала к амплитуде сигнала помехи (фона), действующих на выходе приемной антенны (входе блока обработки сигнала), что уменьшает чувствительность и усложняет устройство датчика индуктивного.
Задачей, на решение которой направлено заявляемое изобретение, является создание датчика индуктивного, который выдает информацию о взаимном расположении двух объектов.
Достигнутым техническим результатом заявляемого изобретения является повышение чувствительности, упрощение конструкции датчика и повышение его надежности.
Для достижения технического результата в датчике индуктивном, состоящем из двух частей, имеющих возможность перемещения относительно друг друга, при этом первая часть датчика содержит рамочные передающую и приемную антенны, подключенные к источнику переменного тока и блоку обработки сигналов соответственно, вторая часть индуктивного датчика содержит рамочную приемную антенну, подключенную к нелинейному элементу, новым является то, что во вторую часть индуктивного датчика дополнительно введены два конденсатора и рамочная передающая антенна, состоящая из одной или нескольких электрически соединенных между собой рамок, при этом нелинейный элемент выполнен в виде одно- или двух полупериодного выпрямителя, входы и выходы которого подключены к рамочным приемной и передающей антеннам соответственно, первый конденсатор соединен с рамочной приемной антенной и образует резонансный контур, резонансная частота которого равна частоте источника переменного тока, а второй конденсатор подключен к рамочной передающей антенне и образует резонансный контур, резонансная частота которого в два раза больше частоты источника переменного тока, при этом ось витков рамок передающей антенны одной части параллельна оси витков рамок приемной антенны другой части датчика, а оси витков рамок приемной и передающей антенн в каждой части датчика расположены во взаимно перпендикулярных плоскостях.
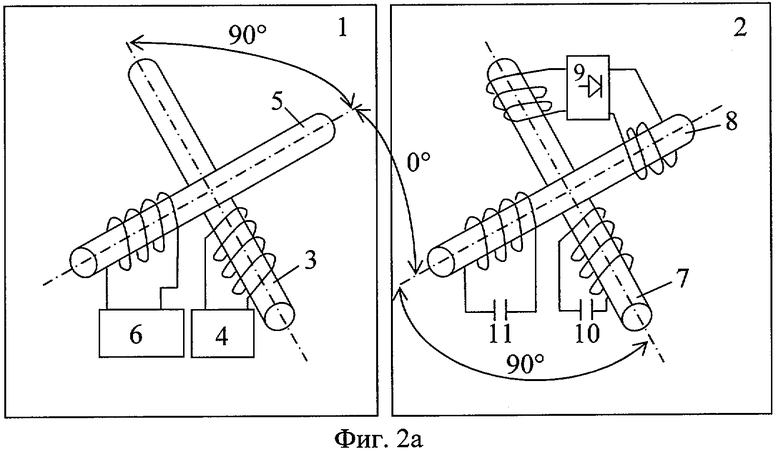
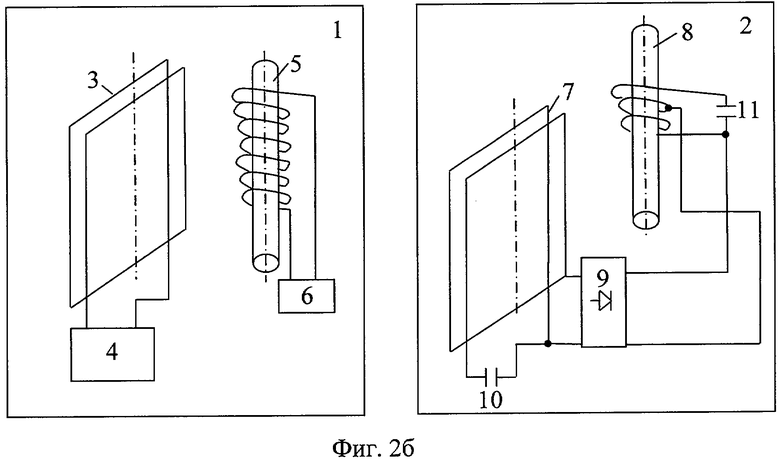
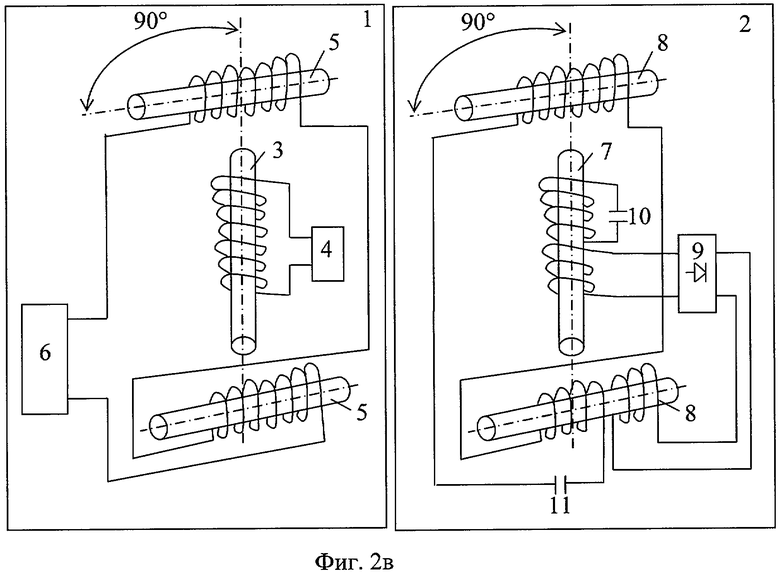
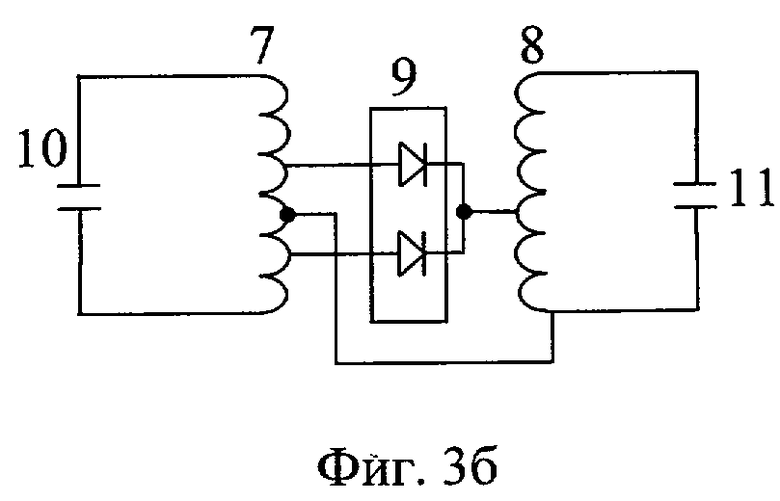
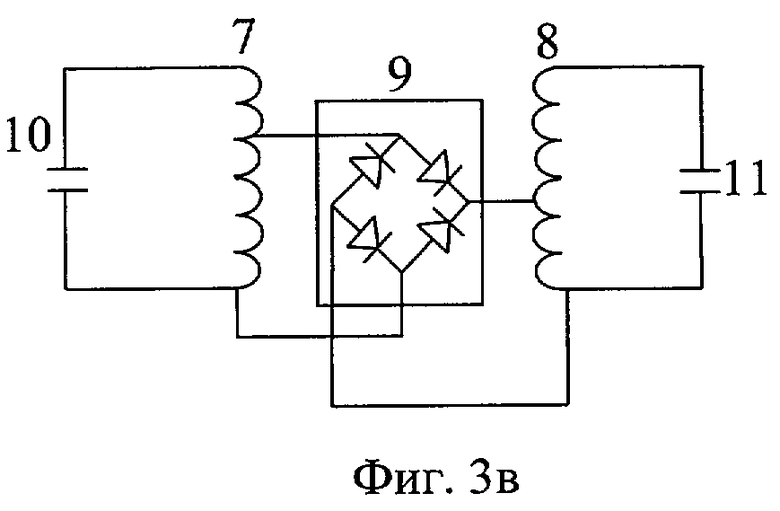
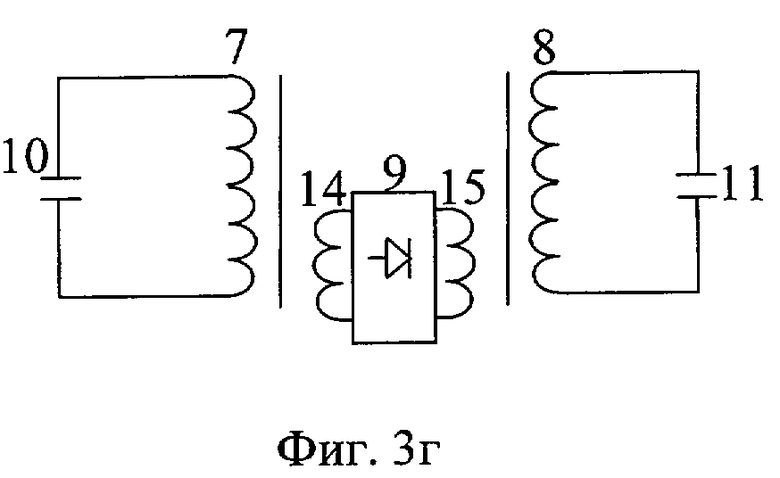
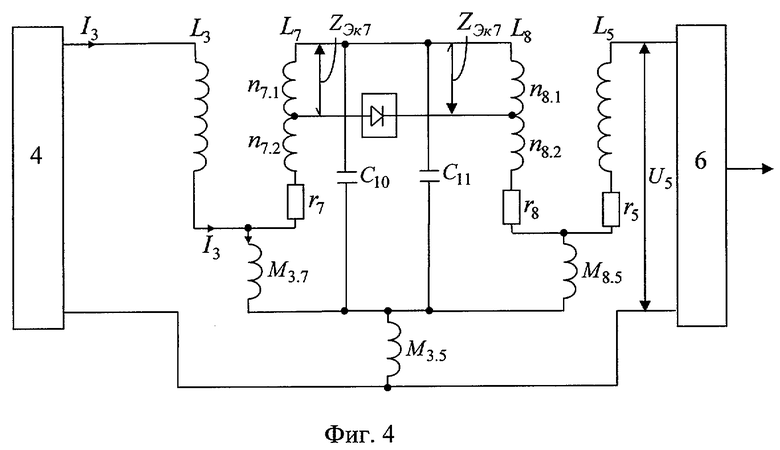
Функциональная схема заявляемого устройства представлена на фиг.1. На фиг.2а, 2б, 2в представлены возможные варианты конструктивных схем антенных систем датчика индуктивного. На фиг.3а, 3б, 3в, 3г представлены варианты связи между приемной и передающей антеннами второй части датчика через нелинейный элемент. На фиг.4 представлена эквивалентная схема передачи сигнала от генератора переменного тока через антенную систему первой и второй части датчика до блока обработки сигнала.
Датчик индуктивный состоит (см. фиг.1) из части 1 и части 2. В состав части 1 входит рамочная передающая антенна 3, подключенная к источнику переменного тока 4, рамочная приемная антенна 5, выходы которой подключены к входам блока обработки сигналов 6. В состав части 2 входит рамочная приемная антенна 7, подключенная к рамочной передающей антенне 8 через нелинейный элемент 9, к выводам рамочных антенн 7 и 8 подключены соответственно конденсаторы 10, 11. Расстояние между частями 1 и 2 может изменяться в процессе их перемещения относительно друг друга. Каждая из частей 1, 2 содержит рамочные передающие антенны 3 и 8 и рамочные приемные антенны 5 и 7. В варианте (см. фиг.2а) все рамочные антенны выполнены намоткой провода на ферромагнитные стержни (например, ферритовые). При этом оси стержней рамочных передающих 3, 8 и приемных 7 и 5 магнитных антенн, принадлежащих соответственно каждой из частей датчика, расположены между собой взаимно перпендикулярно, а ось стержня передающей антенны одной части параллельна оси стержня приемной антенны другой части. В варианте (см. фиг.2б) одна из антенн каждой из частей, например передающая антенна 3 части 1 и приемная антенна 8 части 2, выполнены в виде проволочных рамок, а остальные приемная антенна 5 части 1 и передающая антенна 7 части 2 выполнены намоткой провода на ферромагнитные стержни, при этом плоскости, в которых располагаются витки проволочных рамок, а также оси ферромагнитных стержней антенн первой и второй части датчика параллельны между собой.
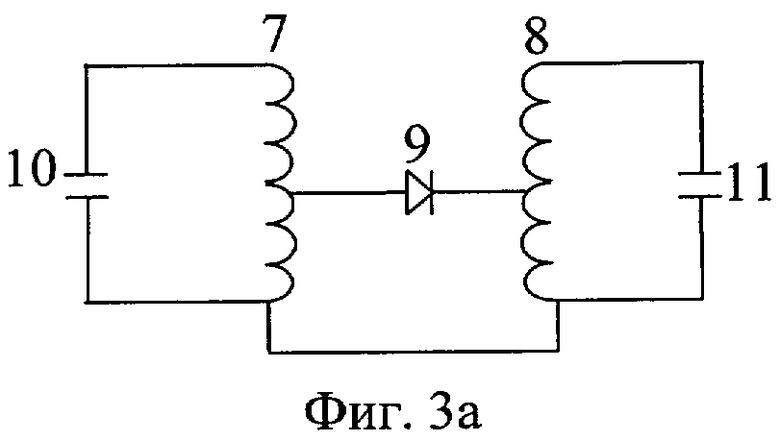
Кроме представленных на фиг.2 вариантов антенных систем, возможно использование вариантов, в которых одна из антенн или все антенны выполнены на двух или более разнесенных ферромагнитных стержнях, обмотки которых включены параллельно или последовательно. На фиг.3 представлены некоторые характерные варианты связи посредством нелинейного элемента приемной и передающей антенн части 2 датчика индуктивного. На фиг.3а изображен вариант с однополупериодным выпрямителем и автотрансформаторным подключением к входу и выходу. На фиг.3б и 3в изображены варианты с двухполупериодным выпрямителем и автотрансформаторным подключением. На фиг.3г изображен вариант с трансформаторным подключением входа и выхода выпрямителя, который может быть выполнен одно- или двухполупериодным. Возможны и другие вариации связи нелинейной между приемной и передающей антеннами, представляющие комбинации трансформаторного и автотрансформаторного подключения к входу и выходу выпрямителя. Поскольку индуктивный датчик предназначен для выдачи информации (команды) при достижении некоторого граничного расстояния между двумя взаимно перемещающимися объектами в процессе сближения или удаления, то первая часть датчика устанавливается на первом объекте, а вторая часть - на втором объекте. Работа датчика основана на электромагнитном взаимодействии антенн, расположенных на его первой и второй частях.
Датчик работает следующим образом.
Переменный ток, протекающий по виткам передающей антенны 3 первой части датчика 1 под действием источника переменного тока 4, выходом, подключенным к выводам обмотки антенны 3, создает в окружающем пространстве электромагнитное поле. Взаимодействие электромагнитного поля, созданного передающей антенной 3 с приемной антенной 7 второй части датчика, приводит к появлению на выводах обмотки приемной антенны 7 переменного напряжения с частотой, равной частоте источника переменного тока 4. Значение амплитуды переменного напряжения на выводах обмотки приемной антенны 7 пропорционально амплитуде напряженности магнитного поля, создаваемого антенной 3 и значению коэффициента связи K3.7 между антеннами 3 и 7. Напряженность магнитного поля, создаваемого антенной 3, зависит от значения амплитуды электрического тока, протекающего по ее виткам, числа витков и геометрических размеров рамки антенны. Коэффициент связи между антеннами определяется размерами их рамок и их взаимным расположением в пространстве: расстоянием и углом между плоскостями, содержащими витки рамок антенн 3 и 7 соответственно. Коэффициент связи между передающей 3 и приемной 7 антеннами растет при уменьшении расстояния между первой и второй частями датчика и соответственно между их антеннами и при прочих равных условиях будет максимален при параллельности указанных выше плоскостей (в случае перпендикулярности их взаимного положения коэффициент связи близок к нулю), поэтому положения рамок передающей антенны 3 на первой части датчика и приемной антенны 7 на второй части установлены так, чтобы витки их обмоток были расположены в параллельных плоскостях. Напряжение, возникающее на выходах приемной антенны 7 под действием электромагнитного поля, создает ток контура индуктивность рамки 7 (L7) - конденсатор 10 (С10) (см. фиг.3), который имеет максимальное значение при равенстве резонансной частоты контура L7, С10 антенны 7 частоте генератора переменного тока 4. Часть напряжения, действующего на элементах контура L7, С10, через элементы связи приложена к входу выпрямителя 9. В случаях, когда амплитуда этого напряжения будет больше прямого напряжения диода в выходной цепи выпрямителя, подключенного к элементам связи с передающей антенной 8, во второй части датчика появится ток, существующий в течение части периода переменного напряжения, действующего на входе выпрямителя, форма этого тока близка к косинусоидальной и в своем спектре содержит высшие гармоники, в том числе вторую гармонику, которая возбуждает контурный ток в параллельном резонансном контуре, образованном индуктивностью рамки передающей антенны 8 L8 (второй части датчика, см. фиг.3, 4) и подключенном к ее выводам конденсатором 11 (С11, фиг.4). Резонансная частота контура L8, С11 в два раза больше частоты переменного электромагнитного поля, возбуждаемого генератором 4 и передающей антенной 3. Переменный ток удвоенной частоты, протекающий по обмотке передающей антенны 8 второй части датчика, возбуждает в окружающем пространстве электромагнитное поле в два раза больше частоты электромагнитного поля, возбужденного антенной 3. Таким образом, в окружающем пространстве первой и второй части датчика индуктивного (см. фиг.1) возможно наличие переменных электромагнитных полей от двух передающих антенн 3 и 8 соответственно, отличающихся значениями амплитуды напряженности магнитного поля и двукратной разницей его частоты.
На выводах приемной антенны 5 первой части датчика при взаимодействии с указанными составляющими электромагнитного поля соответственно возникают две составляющие переменного напряжения амплитуды, которые зависят от значений напряженностей магнитных полей этих составляющих и от коэффициентов K8.5, K3.7 связи между приемной антенной 5 и передающими антеннами 3 и 8 соответственно. При этом составляющая выходного напряжения приемной антенны 5 от взаимодействия с электромагнитным полем, созданным передающей антенной 8 второй части датчика, является полезным сигналом, а составляющая выходного напряжения, обусловленная действием поля передающей антенны 3 первой части датчика, является помехой, и ее значение должно быть минимально возможным. Уменьшение уровня помехи от поля антенны 3 достигается ориентацией витков обмотки (рамки) антенны 5 так, чтобы они располагались в плоскостях, перпендикулярных плоскостям, в которых расположены витки передающей антенны 3. При этом для сохранения максимального коэффициента K8.5 связи между приемной антенной 5 первой части датчика и передающей антенной 8 второй части витки их обмоток располагаются в параллельных плоскостях. Это позволяет также и минимизировать коэффициент связи между антеннами 7, 8 второй части датчика.
Взаимоперпендикулярное расположение плоскостей витков передающих и приемных антенн на каждой из частей датчика обеспечивает не только минимизацию уровня помехи на выходе приемной антенны 5, но и устраняет влияние одной антенны на другую при их настройках, что существенно упрощает процесс настройки в резонанс каждой из антенн. Как указывается выше, уровень сигнала с удвоенной частотой на выходе приемной антенны 5 зависит от значения тока возбуждения передающей антенны 3, коэффициента связи между парами передающих и приемных антенн 3, 7 и 8, 5 и коэффициента второй гармоники тока на выходе нелинейного элемента 9. При постоянстве значения тока возбуждения передающей антенны 3 уровень сигнала на выходе приемной антенны 5 определяется коэффициентами связи K3.7, K8.5, которые в свою очередь зависят от расстояния между антеннами и углами между осями их рамок (витков).
Таким образом, заявляемый индуктивный датчик может быть использован для определения расстояния между двумя объектами при поступательном (прямолинейном) перемещении относительно друг друга или при относительном вращательном движении. В первом случае пары приемной и передающей антенн, располагаемых на разных частях индуктивного датчика, ориентируются так, чтобы оси рамок этих пар антенн были параллельны, что обеспечивает максимальную чувствительность. В случае использования индуктивного датчика для определения вращательного относительного перемещения двух объектов, оси рамок одной из пар передающей и приемной антенн, располагаемых на разных частях датчика, должны быть параллельны, а оси другой пары располагаются под углом, значение которого изменяется при угловом относительном перемещении объектов. При этом при значении переменного угла между осями, равном 90°, коэффициент связи между соответствующими антеннами будет минимален, а при значении угла, равном 0 или 180°, - максимален. Прохождение сигнала от генератора переменного тока 3 до входа блока обработки сигнала 6 иллюстрируется эквивалентной электрической схемой датчика индуктивного, изображенной на фиг.4.
Значение амплитуды напряжения полезного сигнала на выходе приемной антенны 5 U5 пропорционально значению амплитуды тока I3, протекающего по виткам рамки передающей антенны 3, коэффициенту взаимной индуктивности между передающей антенной 3 и приемной антенной 7 - М3.7, добротности контура, образованного индуктивностью антенны 7 и конденсатором 10, коэффициенту передачи по второй гармонике четырехполюсника связи (содержит нелинейный элемент) между контурами L7, С10 и L8, C11, добротности контура L8, C11, образованного индуктивностью передающей антенны 8 и конденсатором С11, взаимной индуктивности М8.5 между передающей антенной 8 и приемной антенной 5.
Значения взаимоиндуктивностей М3.7, М8.5 определяются конструктивными параметрами антенн 3, 7 и 8, 5 (размерами рамок, числом витков), расстоянием между этими парами антенн и значением угла (косинуса угла) между осями рамок (стержней) антенн 3, 7 и 8, 5 соответственно.
Значение амплитуды помехи (фона) на выходе приемной антенны 5 определяется значением амплитуды тока в передающей антенне 3 и значением коэффициента взаимной индуктивности М3.5 между антеннами 3 и 5.
Коэффициент взаимоиндукции М3.5 определяется конструктивными параметрами антенн 3 и 5, расстоянием между ними и углом между осями их рамок (стержней). При перпендикулярном взаимном расположении осей рамок антенн 3 и 5 коэффициент взаимоиндукции минимален. Исследования макетных образцов индуктивного датчика перемещения показали его работоспособность, при этом значение полезного сигнала увеличилось по сравнению с прототипом на 2-3 порядка, а значение уровня помехи уменьшилось на 2 порядка. Заявляемое изобретение позволяет упростить устройство обработки сигналов, повысить стабильность и надежность работы датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭНЕРГИИ | 2022 |
|
RU2802055C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ СЕГНЕТОЭЛЕКТРИЧЕСКОЙ АНТЕННЫ И ЕЕ УСТРОЙСТВО | 2004 |
|
RU2264005C1 |
| Индукционный датчик положения с активной подвижной частью | 2022 |
|
RU2782151C1 |
| РАМОЧНАЯ АНТЕННА | 2007 |
|
RU2380800C2 |
| ГИБРИДНЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДПОВЕРХНОСТНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ | 2019 |
|
RU2743495C1 |
| ПЕРЕДАЮЩИЕ ЛИНЕЙНЫЕ МАГНИТНЫЕ АНТЕННЫ (ЛМА) | 2010 |
|
RU2428774C1 |
| МАЛОГАБАРИТНЫЙ РЕЗОНАТОР ДЛЯ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭНЕРГИИ И ЕГО ИНТЕГРАЦИИ С АНТЕННОЙ ДЛЯ ПЕРЕДАЧИ ДАННЫХ | 2012 |
|
RU2519389C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ПРЕДМЕТОВ | 2000 |
|
RU2201619C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СЕРЕДИНЫ ШПАЛЬНОЙ НАКЛАДКИ И ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ ШПАЛЬНОЙ НАКЛАДКИ | 1998 |
|
RU2153549C2 |
| МАЛОГАБАРИТНАЯ РЕЗОНАНСНАЯ РАМОЧНАЯ КОАКСИАЛЬНАЯ АНТЕННА | 2014 |
|
RU2583758C1 |
Изобретение относится к датчикам перемещения, в частности к перемещениям двух каких-либо объектов относительно друг друга. Сущность: датчик состоит из двух частей, имеющих возможность перемещения относительно друг друга. Первая часть содержит рамочные передающую и приемную антенны, подключенные к источнику переменного тока и блоку обработки сигналов соответственно. Вторая часть содержит рамочную приемную антенну, подключенную к нелинейному элементу, два конденсатора и рамочную передающую антенну, состоящую из одной или нескольких электрически соединенных между собой рамок. Нелинейный элемент выполнен в виде одно- или двухполупериодного выпрямителя, входы и выходы которого подключены к рамочным приемной и передающей антеннам соответственно. Первый конденсатор соединен с рамочной приемной антенной и образует резонансный контур, резонансная частота которого равна частоте источника переменного тока. Второй конденсатор подключен к рамочной передающей антенне и образует резонансный контур, резонансная частота которого в два раза больше частоты источника переменного тока. Ось витков рамок передающей антенны одной части параллельна оси витков рамок приемной антенны другой части датчика. Оси витков рамок приемной и передающей антенн в каждой части индуктивного датчика расположены во взаимно перпендикулярных плоскостях. Технический результат: повышение чувствительности, упрощение конструкции датчика и повышение его надежности. 9 ил.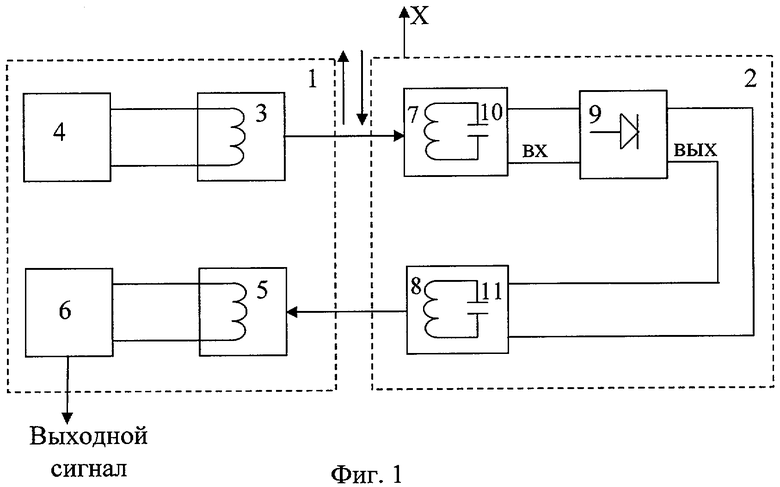
Датчик индуктивный, состоящий из двух частей, имеющих возможность перемещения относительно друг друга, при этом первая часть датчика содержит рамочные передающую и приемную антенны, подключенные к источнику переменного тока и блоку обработки сигналов, соответственно, вторая часть индуктивного датчика содержит рамочную приемную антенну, подключенную к нелинейному элементу, отличающийся тем, что во вторую часть датчика дополнительно введены два конденсатора и рамочная передающая антенна, состоящая из одной или нескольких электрически соединенных между собой рамок, при этом нелинейный элемент выполнен в виде одно- или двухполупериодного выпрямителя, входы и выходы которого подключены к рамочным приемной и передающей антеннам соответственно, первый конденсатор соединен с рамочной приемной антенной и образует резонансный контур, резонансная частота которого равна частоте источника переменного тока, а второй конденсатор подключен к рамочной передающей антенне и образует резонансный контур, резонансная частота которого в два раза больше частоты источника переменного тока, при этом ось витков рамок передающей антенны одной части параллельна оси витков рамок приемной антенны другой части датчика, а оси витков рамок приемной и передающей антенн в каждой части индуктивного датчика расположены во взаимно перпендикулярных плоскостях.
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2002 |
|
RU2231019C2 |
| Прецизионный измеритель перемещений | 1988 |
|
SU1775595A1 |
| Дифференциальный индуктивный датчик микроперемещений | 1990 |
|
SU1747869A1 |
| DE 10312813 A1, 07.10.2004 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |

