ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к электротехнике, а именно к электромагнитным датчикам углового и линейного положения индукционного типа, и может быть использовано в составе, например, прецизионных электроприводов робототехнических и мехатронных систем, металлообрабатывающих станках, навигационных системах, промышленной автоматике.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
В заявке на изобретение US 20110025349 А1 описан индукционный датчик положения, включающий, пользуясь терминологией авторов, антенное устройство с несколькими обмоткам и мишень, положение которой измеряется, состоящую из обмотки с резонансным конденсатором, при этом антенное устройство и мишень способны перемещаться друг относительно друга. Обмотка мишени состоит из двух частей, включенных последовательно, каждая из которых взаимодействует со своей группой обмоток на антенном устройстве посредством взаимной индуктивной связи. Как следует из описания к патенту, группы обмоток могут относиться к каналам грубого и точного отсчетов. Антенное устройство дополнительно содержит обмотку возбуждения, индуцирующую переменный ток в резонансном контуре мишени, который, протекая через обе части обмотки мишени, создает сигнал, пропорциональный ее положению относительно антенного устройства.
К одному из недостатков данного устройства можно отнести то обстоятельство, что через обе части обмотки мишени (грубого и точного отсчета), включенные последовательно друг с другом и с резонансным конденсатором, переменный ток протекает в течение всего времени работы устройства, даже если для его функционирования один из сигналов (например, сигнал грубого отсчета) не требуется. Постоянно включенные последовательно обмотки создают повышенное эквивалентное последовательное сопротивление резонансного контура мишени, которое уменьшает его добротность. Пониженная добротность резонансного контура ведет к уменьшению токов в обмотках мишени, создающих сигнал, пропорциональный ее положению относительно антенного устройства. Тем самым чувствительность устройства снижается.
Ввиду того, что при работе устройства полезный сигнал всегда передают обе части обмотки мишени (грубого и точного отсчета), во избежание взаимного влияния каналов, индуктивная связь между каждой из передающих обмоток мишени и группой обмоток антенного устройства, которая относится к другой передающей обмотке мишени, должна отсутствовать. На практике это требование в чистом виде невыполнимо, что ведет к взаимному влиянию каналов точного и грубого отсчетов друг на друга и, как следствие, к снижению общей чувствительности и линейности датчика. Это обстоятельство также является важным недостатком рассмотренного устройства.
Описанное выше изобретение будем условно относить к устройствам с пассивной подвижной частью (ротором или мишенью), в котором в состав подвижной части включен пассивный резонансный контур или простой индуктивный контур без резонанса. Вместе с тем, для целей повышения точности индукционных датчиков положения интерес исследователей направлен, в том числе, к системам с активной подвижной частью, включающей нелинейные элементы и/или электронные схемы, расположенные непосредственно на ней.
В патенте на изобретение RU 2392582 C1 описан индукционный датчик, состоящий из двух частей, в котором повышение чувствительности и надежности достигаются за счет использования в конструкции второй части (подвижного элемента, положение которого определяется) приемной антенны и связанного с ней первого резонансного конденсатора, нелинейного элемента в виде выпрямителя и передающей антенны со связанным с ней вторым резонансным конденсатором. Приемная антенна второй части датчика и связанный с ней первый резонансный конденсатор настроены в резонанс с частотой возбуждения, создаваемой передающей антенной и связанным с ней источником переменного тока, расположенными на первой части датчика. Передающая антенна и второй резонансный конденсатор второй части датчика образуют резонансный контур, резонансная частота которого в два раза больше частоты источника переменного тока. При этом оси приемной и передающей частей датчика должны быть расположены во взаимно перпендикулярных плоскостях.
Недостатком этого изобретения является требование расположения приемных и передающих антенн второй части датчика (подвижного элемента) во взаимно перпендикулярных плоскостях, обусловленное необходимостью исключить взаимное влияние обмоток, работающих на близких частотах.
Наиболее близкой по технической сущности к изобретению является патентная заявка DE 102008020325 B4, в которой описан датчик углового положения, состоящий из подвижного элемента, положение которого измеряется, несущего на себе приемную катушку, генератор (осциллятор) и передающую катушку, таких, что создаваемый передающей катушкой подвижного элемента в стационарно расположенных приемных катушках датчика полезный сигнал зависит от углового положения подвижного элемента. При этом питание приемной катушки подвижного элемента осуществляется при помощи стационарно расположенной катушки возбуждения и подключенного к ней генератора переменного напряжения. Особенностью данного изобретения является то, что частота, на которой энергия возбуждения передается от катушки возбуждения на приемную катушку подвижного элемента и частота, на которой работает генератор подвижного элемента, передающий полезный сигнал на приемные катушки датчика, существенно различаются, например, в 10 раз и более. Тем самым, угловое положение подвижного элемента предлагается определять выделением при помощи фильтрации полезного сигнала из суммы полезного сигнала и сигнала возбуждения, получаемых на приемных катушках датчика, пользуясь существенной разницей в частотах возбуждения и полезного сигнала.
К недостаткам данного изобретения можно отнести то обстоятельство, что для получения достаточно большого ослабления сигнала возбуждения может потребоваться либо очень большая разница в частотах возбуждения и полезного сигнала, либо применение фильтров с очень высокой добротностью. Техническая реализация обоих вариантов может быть затруднена на практике.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технический результат данного изобретения заключается в повышении точности и чувствительности индукционного датчика положения.
Заявленные преимущества достигаются за счет размещения на подвижной части датчика электронной схемы, представляющей собой специализированный осциллятор и обеспечивающей возможность выбора передающего канала. Полезный сигнал, несущий информацию о положении подвижной части датчика, передается либо обмоткой точного отсчета, либо обмоткой грубого отсчета, но не двумя обмотками одновременно. Управление выбором передающего канала осуществляется вариацией частоты переменного напряжения, подаваемого на обмотку возбуждения неподвижной части датчика, при помощи которой осуществляется питание электронной схемы, расположенной на подвижной части датчика.
Частота возбуждения и, соответственно, выбираемый канал, задается системой управления неподвижной части датчика исходя из логики работы системы.
Электронная схема подвижной части датчика осуществляет слежение за частотой возбуждения и управление передающим каналом в зависимости от этой частоты. При этом, частота передаваемого сигнала может быть кратна или равна частоте напряжения возбуждения.
Таким образом, система управления неподвижной части способна управлять тем, какой сигнал, например, точного или грубого отсчета, передает подвижная часть датчика.
Ввиду того, что передача сигнала управления осуществляется изменением частоты возбуждения, этот способ оказывается нечувствительным к изменению расстояния (зазора) между неподвижной и подвижной частями датчика.
Реализация описанного принципа работы индукционного датчика положения позволяет исключить требование к минимизации взаимной индуктивности каждой из передающих обмоток подвижной части и группы обмоток неподвижной части, относящихся к другой обмотке подвижной части. В результате повышается точность индукционного датчика.
КРАТКОЕ ОПИСАНИЕ СХЕМ
Признаки и преимущества, а также техническое и промышленное назначение типовых вариантов осуществления настоящего изобретения описаны ниже со ссылками на прилагаемые схемы.
Фиг. 1 представляет собой вид, на котором показана структурная электрическая схема индукционного датчика положения с активной подвижной частью, где:
1 - система управления,
2 - передающий резонансный контур возбуждения,
3 - приемный резонансный контур возбуждения,
4 - выпрямитель,
5 - регулятор напряжения,
6 - схема ФАПЧ,
7 - источник опорного напряжения,
8 - компаратор,
9 - делитель частоты,
10 - устройство выбора передающего канала,
11 - буфер канала точного отсчета,
12 - передающий резонансный контур канала точного отсчета,
13 - приемная обмотка канала точного отсчета,
14 - буфер канала грубого отсчета,
15 - передающий резонансный контур канала грубого отсчета,
16 - приемная обмотка канала грубого отсчета,
Фиг. 2 представляет собой вид, на котором показана функциональная электрическая схема датчика углового положения с активной подвижной частью.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Типовой вариант осуществления настоящего изобретения описан подробно со ссылками на прилагаемые схемы. В приведенном ниже описании приведена схемотехническая реализация индукционного датчика положения с активной подвижной частью для промышленной автоматики, робототехнических и мехатронных систем, однако, это всего лишь пример для описания.
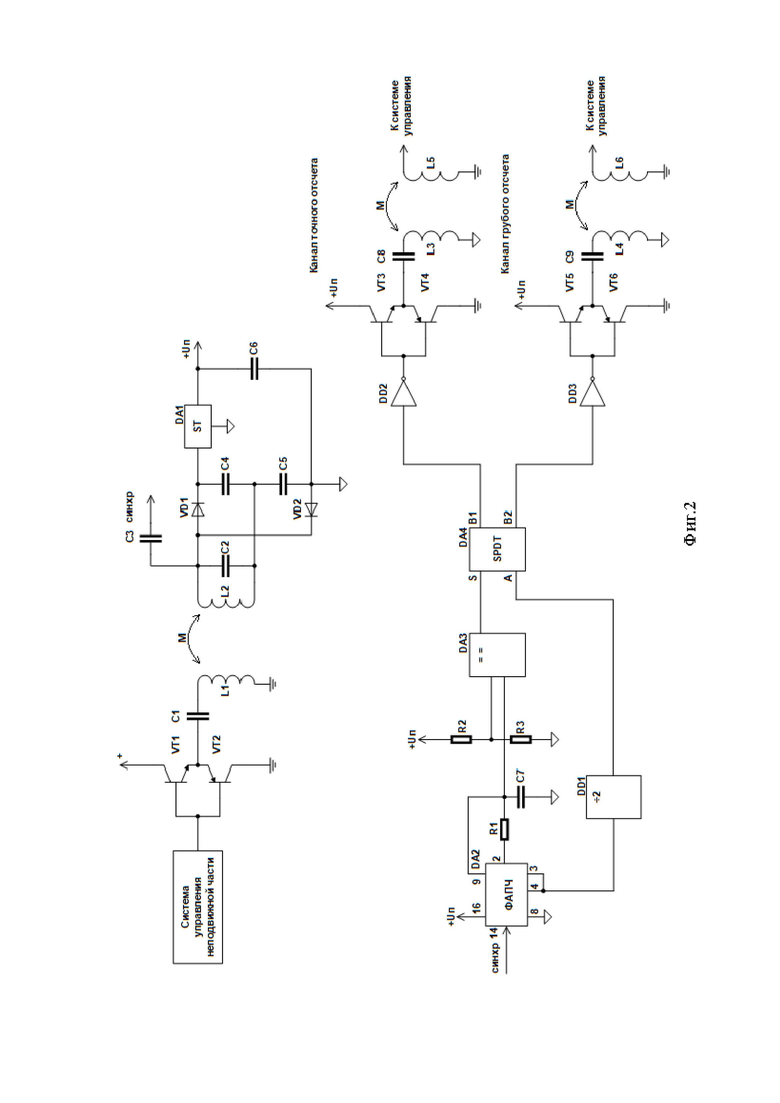
Фиг. 1 представляет собой изображение структурной электрической схемы предлагаемого индукционного датчика положения с активной подвижной частью.
Электрическая структурная схема состоит из системы управления 1, которая расположена на неподвижной части датчика и управляет его работой, в том числе формирует напряжение возбуждения переменного тока, преимущественно с частотой 0,1÷100 МГц, которое прикладывается к передающему резонансному контуру возбуждения 2. К приемному резонансному контуру возбуждения 3, расположенному на подвижной части датчика и также работающему на частоте возбуждения, подключен выпрямитель 4, формирующий напряжение питания постоянного тока для питания электронной схемы подвижной части датчика, которое затем стабилизируется регулятором напряжения 5. Напряжение питания на выходе регулятора предпочтительно находится в диапазоне от +5 В до +15 В.
Система управления 1 представляет собой электронную схему на базе программируемого микроконтроллера или программируемой логической интегральной схемы (ПЛИС), имеющего микропроцессор, по крайней мере один блок аналого-цифрового преобразования (АЦП) и по крайней мере один таймер. При помощи таймера осуществляется генерация сигнала возбуждения передающего резонансного контура. При помощи АЦП осуществляется преобразование аналоговых сигналов, полученных приемными обмотками каналов точного 13 и грубого 16 отсчетов, в цифровой код, на основе которого микропроцессор посредством расчета алгоритмов цифровой обработки сигналов определяет искомый угол.
С приемного резонансного контура возбуждения 3 также снимается сигнал, имеющий частоту возбуждения, который подается на схему фазовой авто подстройки частоты (ФАПЧ) 6. Схема ФАПЧ 6 формирует на своем выходе два сигнала: аналоговый сигнал постоянного тока для управления встроенным в схему ФАПЧ генератором управляемого напряжения (ГУН, на схеме не показан т.к. в входит в состав схемы ФАПЧ), и импульсный сигнал с частотой, равной частоте работы приемного резонансного контура. Таким образом, измеряя уровень сигнала постоянного тока на входе ГУН схемы ФАПЧ 6, можно определять частоту, на которой работает схема возбуждения. Тем самым, изменяя в небольших пределах частоту возбуждения относительно резонансной частоты, на которую настроены передающий 2 и приемный 3 резонансные контуры возбуждения, можно передавать на подвижную часть датчика аналоговый сигнал низкой частоты. По сути, от неподвижной части датчика к подвижной части датчика одновременно передается как энергия для питания электронной схемы подвижной части датчика, так и сигнал управления выбором активного канала.
Полученный с выхода схемы ФАПЧ 6 аналоговый сигнал управления ГУН сравнивается компаратором 8 с опорным сигналом, создаваемым источником опорного напряжения 7, в результате чего формируется дискретный сигнал, управляющий устройством выбора передающего канала 10 в зависимости от частоты возбуждения. Устройство выбора передающего канала 10 передает частоту с выхода схемы ФАПЧ 6, поступающую через делитель частоты 9, который может отсутствовать, на буфер канала точного отсчета 11 и передающий резонансный контур канала точного отсчета 12 или на буфер канала грубого отсчета 14 и передающий резонансный контур канала грубого отсчета 15.
Полученный приемными обмотками каналов точного 13 и грубого 16 отсчетов неподвижной части датчика сигнал, несущий информацию об угле взаимного расположении неподвижной и подвижной частей датчика, передается на систему управления 1, где преобразуется в цифровое значение угла поворота.
Более подробно вариант осуществления настоящего изобретения раскрыт на Фиг. 2, на которой представлена функциональная электрическая схема. При этом конкретный вариант осуществления является лишь примером для описания и может быть соответствующим образом модифицирован, чтобы соответствовать характеристикам индукционного датчика положения с активной подвижной частью.
В соответствии с Фиг. 2, на передающий резонансный контур 2, образованный конденсатором С1 и передающей обмоткой L1, при помощи двухтактного буфера (не показан на Фиг. 1) на транзисторах VT1 и VT2 подается переменное напряжение возбуждения с частотой, предпочтительно, от 0,1 МГц до 100 МГц. Обмотки L1 и L2 имеют индуктивную связь и образуют воздушный трансформатор. Приемный резонансный контур 3, образованный обмоткой L2 и конденсатором С2, подключен к двухтактному выпрямителю 4 на диодах VD1 и VD2 с удвоителем напряжения на конденсаторах С4 и С5. Полученное с выхода выпрямителя нестабилизированное напряжение в диапазоне, предпочтительно, от+5 В до+20 В, подается на регулятор напряжения 5 на базе микросхемы DA1, с выхода которого снимается стабилизированное напряжение, например, в диапазоне от +5 В до +15 В, используемое для питания остальных частей электронной схемы.
С приемного резонансного контура 3 при помощи конденсатора С3 также снимается опорное напряжение, имеющее частоту возбуждения резонансного контора, которое подается на микросхему ФАПЧ 6 DA2. В качестве микросхемы ФАПЧ 6, например, могут быть использованы микросхемы CD4046B, К564ГГ1, КР1561ГГ1 или их функциональные аналоги.
Микросхема ФАПЧ 6 DA2 является системой с обратной связью и формирует на выходе встроенного автоматического регулятора такое напряжение управления встроенным ГУН, что выходной сигнал ГУН, представляющий собой меандр, совпадает по фазе (с точностью до некоторого постоянного угла, зависящего от типа применяемого дискриминатора фазы ФАПЧ) с частотой опорного напряжения, снимаемого с приемного резонансного контура. Тем самым, микросхема ФАПЧ 6 выполняет две функции: привязки к частоте возбуждения и формирования напряжения управления ГУН.
Полученное с микросхемы ФАПЧ 6 DA2 напряжение управления ГУН и напряжение источника опорного напряжения 7, получаемое при помощи делителя на резисторах R2 и R3, подаются на аналоговый компаратор 8 DA3. Дискретный сигнал с выхода компаратора 8 управляет устройством выбора передающего 10 канала на базе микросхемы DA4 управляемого ключа типа SPDT (Single Pole, Double Throw). На вход этого же ключа от ФАПЧ через делитель частоты DD1 или без такового, подается сигнал с выхода ГУН. В зависимости от состояния выхода компаратора 8 управляемый ключ DA4 передает частоту ГУН на буфер 11 DD2 или 14 DD3. Буфер 11 DD2 управляет двухтактным формирователем на базе транзисторов VT3 и VT4, работающим на передающий резонансный контур 12 канала точного отсчета в составе конденсатора С8 и обмотки L3. Аналогичными образом буфер 14 DD3 управляет двухтактным формирователем на базе транзисторов VT5 и VT6, работающим на передающий резонансный контур 15 канала грубого отсчета в составе конденсатора С9 и обмотки L4. В случае, если активен канал точного отсчета, то сигнал передается от обмотки L3 к индуктивно связанной с ней обмотке L5 и далее на систему управления 1. В случае, если активен канал грубого отсчета, то сигнал передается от обмотки L4 к индуктивно связанной с ней обмотке L6 и далее на систему управления 1.
Тем самым, в зависимости от частоты возбуждения достигается возможность выбора передающего канала подвижной части датчика, что исключает одновременную работу каналов точного и грубого отсчета и исключает требование к минимизации взаимной индуктивности названных каналов. В результате повышается точность индукционного датчика положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктивный абсолютный преобразователь угловых перемещений | 2021 |
|
RU2788423C2 |
| ВЫСОКОЧАСТОТНЫЙ ГЕНЕРАТОР ДЛЯ ИОННЫХ И ЭЛЕКТРОННЫХ ИСТОЧНИКОВ | 2008 |
|
RU2461908C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2279634C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РОТОРА МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВОЗБУЖДЕНИЯ ПЕРВИЧНЫХ КОЛЕБАНИЙ | 2006 |
|
RU2319928C2 |
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ЧАСТОТЫ ГЕТЕРОДИНА ПОСРЕДСТВОМ КОНТРОЛЯ ВНЕШНИХ УСЛОВИЙ | 2001 |
|
RU2333598C2 |
| БЕСПРОВОДНАЯ ЗАРЯДНАЯ СИСТЕМА ДЛЯ МАЛОМОЩНЫХ ПОТРЕБИТЕЛЕЙ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2012 |
|
RU2510558C1 |
| РАДИОЛОКАЦИОННЫЙ ДАТЧИК СКОРОСТИ СБЛИЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА С ПРЕПЯТСТВИЕМ | 2013 |
|
RU2543493C1 |
| Способ получения сигнала управления громкостью у терменвокса | 2018 |
|
RU2683121C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПРИЦЕЛЬНЫХ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2006 |
|
RU2329603C2 |

Изобретение относится к электротехнике, а именно к электромагнитным датчикам углового и линейного положения индукционного типа, и может быть использовано в составе прецизионных электроприводов робототехнических и мехатронных систем, металлообрабатывающих станках, навигационных системах, промышленной автоматике. Техническим результатом является повышение чувствительности и точности определения положения. Индукционный датчик положения, содержащий неподвижную и подвижную части способные перемещаться относительно друг друга, в котором на неподвижной части расположена система управления, передающий резонансный контур и приемные обмотки каналов грубого и точного отсчета, в подвижной части расположен приемный резонансный контур, электронная схема и передающие обмотки каналов грубого и точного отсчета. При этом в состав электронной схемы, расположенной на подвижной части датчика, входит схема фазовой автоподстройки частоты, управляемая изменением частоты напряжения питания (частота возбуждения) передающего резонансного контура неподвижной части и управляющая выбором передающего канала точного или грубого отсчета подвижной части датчика. 2 з.п. ф-лы, 2 ил.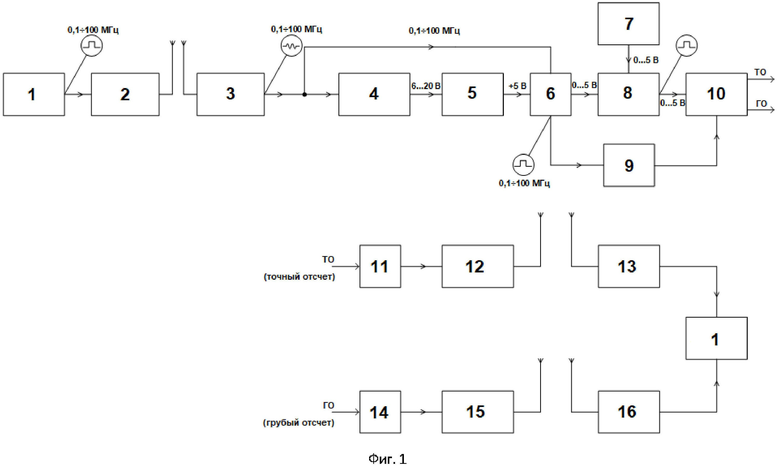
1. Индукционный датчик положения, состоящий из неподвижной и подвижной частей, способных перемещаться относительно друг друга, в котором на неподвижной части расположена система управления, передающий резонансный контур возбуждения и приемные обмотки каналов грубого и точного отсчетов, на подвижной части расположен приемный резонансный контур возбуждения, передающие резонансные контуры каналов грубого и точного отсчетов, а также электронная схема осциллятора, питающая передающие резонансные контуры каналов грубого и точного отсчетов, отличающийся тем, что в состав электронной схемы осциллятора, расположенной на подвижной части датчика, введены выпрямитель, регулятор напряжения, компаратор, устройство выбора передающего канала, делитель частоты, источник опорного напряжения, буферы каналов точного и грубого отсчета и схема фазовой автоподстройки частоты (ФАПЧ), подключенная входами к приемному резонансному контуру возбуждения и регулятору напряжения, а выходом через делитель частоты и буферы канала точного отсчета и канала грубого отсчета к передающим резонансным контурам каналов грубого и точного отсчетов, при помощи которой осуществляется синхронизация выходной частоты осциллятора с частотой колебаний приемного резонансного контура возбуждения и тем самым изменением частоты колебаний приемного резонансного контура возбуждения обеспечивается возможность управления выбором передающего резонансного контура каналов грубого или точного отсчета.
2. Индукционный датчик положения по п.1, отличающийся тем, что каналов точного отсчета датчика может быть несколько, предпочтительно 1 или 2 шт.
3. Индукционный датчик положения по п.1, отличающийся тем, что каналов грубого отсчета датчика может быть несколько, предпочтительно 1 или 2 шт.
| DE 102008020325 B4, 16.03.2017 | |||
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2011 |
|
RU2454625C1 |
| Цифровой индукционный датчик положения | 1961 |
|
SU147115A1 |
| US 4816759 A, 28.03.1989. | |||

