Изобретение относится к области ориентации, навигации и управления подвижными объектами и предназначено для измерения угловой скорости.
Известно, что колебания частиц в акустических волнах сопровождаются инерциальными эффектами, что делает возможным использование этих волн в гироскопии в целях измерения скорости вращения.
Известен способ измерения угловой скорости, реализуемый в устройствах на поверхностных акустических волнах [S.W.Lee A micro rate gyroscope based on the SAW gyroscopic effect, Journ. of Micromech. & Microeng., No 17, 2007], где информативный сигнал формируется за счет изменения скорости распространения поверхностной акустической волны в зависимости от скорости вращения звукопровода. Достоинством такого способа является технологичность конструкции, недостатком - низкая скорость перестройки, связанная с наличием в цепи обратной связи высокодобротной линии задержки.
Наиболее близким по совокупности существенных признаков к предлагаемому способу измерения угловой скорости является способ [WO 2008/000310 Al G01C 19/56], состоящий в том, что возбуждают продольную акустическую волну и регистрируют поперечную волну, возникающую при вращении, путем разделения типов колебаний за счет построения сложных многослойных поглощающих и отражающих структур. Пленочным излучающим резонатором возбуждают продольную акустическую волну. Многослойная структура, выполненная на верхней грани подложки под излучающим резонатором в виде напыленных слоев, служит фильтром, поглощающим паразитную поперечную волну, возникающую при возбуждении продольной волны. Толщину слоев фильтра выбирают равной четверти длины паразитной поперечной волны. Далее продольная волна попадает в слой - так называемую зону Кориолиса, где при вращении под воздействием силы Кориолиса возникает вторичная поперечная волна. Продольную волну локализуют в зоне Кориолиса с помощью многослойного пленочного отражателя, напыленного между подложкой и зоной Кориолиса в виде слоев, толщина которых равна четверти длины продольной волны. Вторичную поперечную волну, возникшую из продольной в зоне Кориолиса при вращении, регистрируют приемным пленочным резонатором, расположенным на нижней грани подложки.
Достоинством способа является возможность работы в непрерывном режиме. Основным недостатком является низкая чувствительность измерения угловой скорости, так как амплитуда колебаний, возникающих в результате действия силы Кориолиса, обратно пропорциональна рабочей частоте несущих колебаний, а возникающая в зоне Кориолиса вторичная волна имеет скорость распространения, отличную от излучаемой продольной волны, то происходит нарушение пространственного синхронизма между продольными и поперечными волнами, что приводит к неэффективности данного способа. Другим недостатком является технологическая сложность конструктивной реализации способа.
Задачей настоящего изобретения является разработка способа для измерения угловой скорости, обеспечивающего высокую чувствительность, а также не требующего сложной технологической реализации.
Поставленная задача решается за счет того, что предлагаемый способ, также как и известный, заключается в измерении изменения характеристик объемной акустической волны, пропорциональных скорости вращения. Но в отличие от известного в предлагаемом способе измерения угловой скорости на излучающий преобразователь поперечной волны подают электрический сигнал в виде последовательности радиоимпульсов длительностью, не превышающей двойного времени распространения акустической волны в твердотельном звукопроводе, и регистрируют ортогональную компоненту излучаемой поперечной волны, возникающей в результате действия силы Кориолиса, пропорциональную угловой скорости вращения звукопровода.
Техническим результатом является повышение чувствительности способа измерения угловой скорости за счет перехода к другому типу акустических волн, а именно к поперечным волнам, а также увеличения зоны воздействия силы Кориолиса, что приводит к повышению проявления ее влияния на поперечную волну, как видно из формулы (5).
Технический результат достигается за счет того, что на излучающий преобразователь подают электрический сигнал в виде последовательности радиоимпульсов длительностью, не превышающей двойное время прохождения акустической волны в материале звукопровода. Преобразователь преобразует электрический импульс в акустический, таким образом, формируется акустический сигнал, распространяющийся в виде объемной поперечной акустической волны, бегущей вдоль оси вращения звукопровода. Длительность сигнала, возбуждающего преобразователь, выбирается из условия разделения во времени излученных и отраженных импульсов, которые при наложении интерферируют и искажают регистрируемый сигнал. На приемном преобразователе принимают ортогональную составляющую излучаемой поперечной волны, возникающую в результате воздействия силы Кориолиса, пропорциональную скорости вращения звукопровода.
Известно [Lao B.Y. Gyroscopic effect in surface acoustic waves // Proceedings of 1980 IEEE international ultrasonic symposium, IEEE catalog No. 80CH16022 -N.Y. 1980 - p.687-691], что распространение объемной акустической волны в твердотельном звукопроводе с учетом вращательного движения относительно его оси, вдоль которой распространяется акустическая волна, описывается системой уравнений:

где W - относительная частота вращения W=Ω⁄ω, v - скорость распространения волны в звукопроводе, ρ - плотность материала звукопровода, p - вектор поляризации, µ - сдвиговой коэффициент Ламэ, j - мнимая единица.
Как показали проведенные исследования, уравнение (1) позволяет найти скорость распространения и направление вектора поляризации колебаний частиц в волне. Скорость v находится из условия равенства нулю определителя, что дает два уравнения для определения скоростей и два значения действительных скоростей компонент упругих волн:

При этом направление вектора поляризации, определяющего направление движение частиц, определяется по формуле:
С учетом (2) можно получить для каждой из волн:
Наличие мнимой единицы свидетельствует о том, что колебания по двум осям (X и Y) сдвинуты по фазе на 90°, что говорит о круговой поляризации двух видов распространяющихся волн. Следовательно, базовыми волнами являются волны с круговой поляризацией, при этом вращение частиц в этих волнах происходит во взаимно противоположных направлениях. Общий характер движения частиц в волне определяется сложением двух базовых волн.
При распространении из-за разницы скоростей компонент волны характер движения частиц будет изменяться. Можно показать, что линейный характер движения при этом сохранится, однако направление колебаний будет непрерывно меняться, что соответствует вращению направления поляризации упругой волны. Проекции смещения частиц по осям ξ2=ξу и ξ3=ξz для точки пространства с координатой х=0 для волны с круговым движение частиц, вращающихся против часовой стрелки, можно записать
ξy=ξ0 cos(ωt), ξz=ξ0 sin(ωt),
а для волны с вращением в противоположенную сторону
ξy=ξ0 cos(ωt), ξz=-ξ0 sin(ωt).
Сложение этих двух колебаний даст колебания с составляющими
ξy=2ξ0 cos(ωt), ξz=0,
то есть получаем линейно поляризованное смещение колеблющихся частиц. Это движение соответствует колебаниям, создаваемым преобразователем поперечных волн, то есть может быть возбуждено таким преобразователем.
При разной скорости распространения акустических волн с различными направлениями поворота векторов смещения, вызванными вращением звукопровода вокруг его оси, на некотором расстоянии х получим фазовый сдвиг между этими двумя составляющими, который можно обозначить как α:
(ωt- k1x) - (ωt- k2x)=k2x- k1x=α
Тогда компоненты векторов смещения двух базовых волн можно записать:
ξy=ξ0 cos(ωt-k1x), ξz=ξ0 sin(ωt-k1x)
для одной из волн и
ξy=ξ0 cos(ωt-k1x-α), ξz=-ξ0 sin(ωt-k1x)
для другой.
Суммарное колебание
ξyΣ=ξ0 (cos(ωt-k1x)+cos(ωt-k1x-α))=2ξ0cos(ωt-k1x-α/2)cos(α/2);
ξzΣ=ξ0 (sin(ωt-k1x)-sin(ωt-k1x-α))=2ξ0cos(ωt-k1x-α/2)sin(α/2);
то есть имеем синфазное сложение колебаний по двум осям с амплитудой составляющих, зависящих от фазового сдвига α (или от разницы произведения волновых чисел и расстояния соответственно). Таким образом, сохраняется линейная поляризация волны, однако угол поворота вектора поляризации будет меняться по мере распространения. Действительно, амплитуды смещения по осям Х и Y можно записать:
Ау=2ξ0cos(α/2), AZ=2ξ0sin(α/2)
Постоянная разность скоростей определяет и постоянную скорость вращения угла поляризации принимаемой волны. Угол поляризации α=k2x-k1x=ωx(1/v2-1/v1) можно вычислить, используя (2).
Тогда угол поворота направления поляризации пропорционален угловой скорости вращения и может быть описан формулой:
где Δφ - угол поворота, Ω - угловая частота вращения, L- длина звукопровода, Vo - скорость распространения волны в отсутствии вращательного движения  , ρ - плотность материала звукопровода.
, ρ - плотность материала звукопровода.
Поворот угла поляризации может интерпретироваться как появление ортогональной составляющей колебаний с амплитудой, пропорциональной sinΔφ.
Угол поворота поляризации мал, то есть амплитуда ортогональной компоненты акустической волны много меньше амплитуды излучаемой компоненты. Поэтому при выделении информативного сигнала для повышения чувствительности способа регистрируют именно ортогональную компоненту, возникающую в результате действия силы Кориолиса при вращении.
Величина ортогональной компоненты колебаний, регистрируемой приемным преобразователем, пропорциональна угловой частоте вращения, не зависит от частоты звуковой волны, определяется временем распространения волны в звукопроводе, как видно из формулы (5).
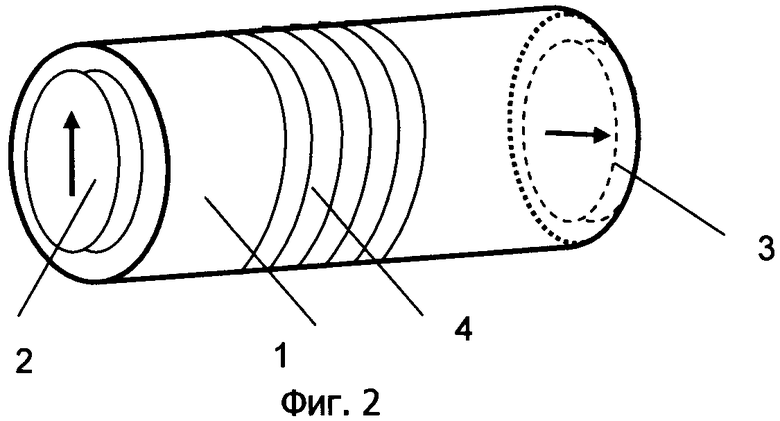
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема формирования ортогональной компоненты акустической волны, возникающей при вращении за счет действия силы Кориолиса, а на фиг.2 - устройство, с помощью которого возможно реализовать предлагаемый способ измерения угловой скорости.
Объемная поперечная акустическая волна, генерируемая излучающим преобразователем, распространяющаяся в звукопроводе при наличии его вращения, сопровождается возникновением дополнительной ортогональной компоненты колебаний. Формирование этой компоненты для объемной поперечной акустической волны, распространяющейся вдоль оси вращения звукопровода, проиллюстрировано на фиг.1. Поляризация волны, определяемая излучающим преобразователем, совпадает с осью Z, т.е. смещения частиц ξ0 среды лежат в плоскости XOZ. Если тело подвергнуть вращению вокруг оси Х с угловой частотой Ω, то возникающие силы Кориолиса создадут дополнительные смещения ξc, гармонически распределенные вдоль оси Х в среде. Таким образом, в объемной акустической волне возникает дополнительная компонента колебаний, имеющая относительно излучаемой волны ортогональную поляризацию и регистрируемая приемным преобразователем.
На фиг.2 приведена возможная конструкция чувствительного элемента гироскопа, реализующего настоящий способ измерения угловой скорости. Чувствительный элемент гироскопа состоит из твердотельного изотропного звукопровода 1, излучающего 2 и приемного 3 преобразователей. Звукопровод имеет цилиндрическую форму и кольцевые канавки 4, нанесенные на его поверхность с целью минимизации реверберационных помех. Излучающий преобразователь, расположенный на одном из плоскопараллельных торцов звукопровода, генерирует в звукопроводе объемную поперечную акустическую волну в направлении, совпадающем с осью вращения звукопровода. Приемный преобразователь, расположенный на другом торце звукопровода, имеет направление чувствительности, сориентированное относительно направления чувствительности излучающего преобразователя под углом, близким к 90°, для максимального ослабления сигнала от излучаемой объемной волны и приема приемным преобразователем ортогональной компоненты, возникающей при вращении за счет действия силы Кориолиса.
Описание изобретения свидетельствует о том, что предложен новый способ, в основе которого лежит иной принцип измерения угловой скорости путем измерения изменения параметров поперечной бегущей объемной акустической волны путем регистрации ортогональной компоненты, возникающей при вращении в результате действия силы Кориолиса. Это доказывает, что достигнут технический результат - повышение чувствительности способа, а также упрощение его конструктивной реализации. При этом высокая чувствительность достигается за счет того, что используют излучаемую поперечную бегущую волну и возникающие в результате действия сил Кориолиса колебания, которые могут быть представлены как поперечная волна с ортогональной поляризацией, и так как скорости этих волн равны, то будет соблюдаться пространственный синхронизм, а амплитуда ортогональной составляющей будет увеличиваться по мере распространения в звукопроводе. Кроме того, предложенная реализация способа существенно упрощает конструкцию чувствительного элемента, так как в ней отсутствуют сложные многослойные отражательные структуры, что снижает влияние технологических погрешностей на точность измерения угловой скорости и увеличивает чувствительность способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2460078C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА | 2011 |
|
RU2457436C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА | 2009 |
|
RU2397445C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2010 |
|
RU2426131C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА НА ЕГО ОСНОВЕ | 2012 |
|
RU2520949C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2010 |
|
RU2426132C1 |
| Способ измерения расхода жидкого носителя, использующий эффект Кориолиса | 2022 |
|
RU2804749C1 |
| Способ измерения расхода жидкого носителя, использующий эффект Кориолиса | 2023 |
|
RU2817559C1 |
| Способ измерения расхода жидкого носителя, использующий эффект Кориолиса | 2024 |
|
RU2821029C1 |
| Ультразвуковой способ измерения угловой скорости | 2019 |
|
RU2714530C1 |
Изобретение относится к области ориентации, навигации и управления подвижными объектами и предназначено для измерения угловой скорости. Способ измерения угловой скорости состоит в измерении изменения характеристик акустической волны при наличии вращения. Информативным сигналом служит величина изменения поляризации поперечной объемной акустической волны. На излучающий преобразователь подают сигнал в виде последовательности радиоимпульсов длительностью, не превышающей двойного времени распространения акустической волны в звукопроводе. Ортогональную компоненту излучаемой объемной поперечной акустической волны, возникающую в результате действия силы Кориолиса, регистрируют приемным преобразователем. Возникающий при этом сигнал пропорционален скорости вращения. Технический результат - повышение чувствительности способа измерения угловой скорости, а также упрощение его конструктивной реализации. 2 ил.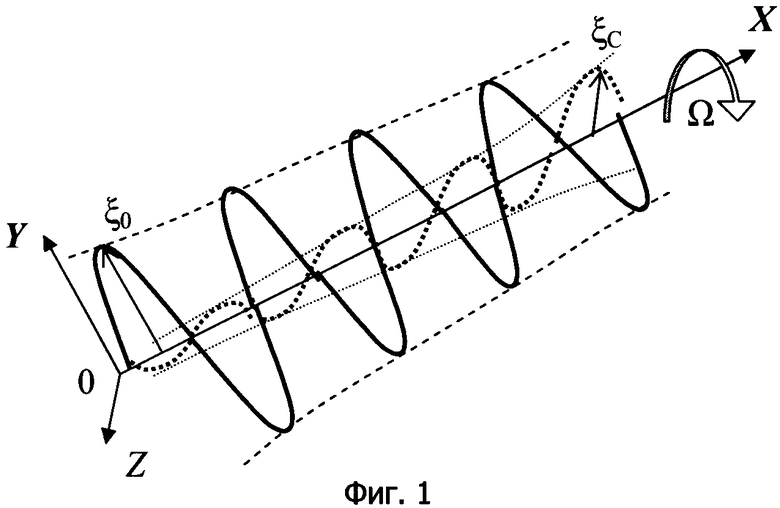
Способ измерения угловой скорости путем измерения изменения характеристик объемной акустической волны, пропорциональных скорости вращения, отличающийся тем, что на излучающий преобразователь поперечной волны подают электрический сигнал в виде последовательности радиоимпульсов длительностью, не превышающей двойного времени распространения акустической волны в твердотельном звукопроводе, и регистрируют ортогональную компоненту излучаемой поперечной волны, возникающей в результате действия силы Кориолиса.
| WO 2008000310 A1, 03.01.2008 | |||
| US 3905235 A, 16.09.1975 | |||
| US 2007220971 A1, 27.09.2007 | |||
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ РЕЗОНАНСНОГО ГИРОСКОПА НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ С ДРАЙВЕРОМ | 2007 |
|
RU2345446C1 |

