Изобретение относится к области приборостроения, а именно к приборам ориентации, навигации и системам управления подвижными объектами и предназначено для измерения угловой скорости.
Известны способы измерения угловой скорости с помощью объемных акустических волн [патент №2392625 «Способ измерения угловой скорости», опубл. 20.06.2010] и способ [патент №2520949 «Способ измерения угловой скорости и чувствительный элемент гироскопа на его основе», опубл. 27.06.2014].
Способ [патент №2520949 «Способ измерения угловой скорости и чувствительный элемент гироскопа на его основе», опубл. 27.06.2014] отличается тем, что сигналом на входе является волна круговой поляризации, а сигналом на выходе является сдвиговая компонента каждой из волн круговой поляризации. Измерение угловой скорости основано на оценке разности фаз, возникающей из-за различия времен распространения двух объемных акустических волн круговой поляризации. Разность фаз оценивается по принимаемым фазам сдвиговых компонент волн круговой поляризации.
Чувствительный элемент содержит два идентичных твердотельных звукопровода, между которыми размещают пластинчатый пьезоэлектрический излучающий преобразователь волн круговой поляризации. На свободных торцах размещают пластинчатый приемный преобразователь линейно поляризованных сдвиговых волн. Излучающий пьезопреобразователь возбуждает в каждом звукопроводе волну круговой поляризации. Таким образом, две объемные акустические волны круговой поляризации распространяются в звукопроводах вдоль оси, вокруг которой происходит вращение, но в противоположных направлениях. Каждый приемный преобразователь принимает сдвиговую компоненту волны круговой поляризации. Разность фаз между принятыми компонентами пропорциональна скорость вращения.
Однако стоит отметить, что недостатком указанного способа является сложность конструкции преобразователя, а также необходимость наличия двух идентичных звукопроводов.
Способ измерения угловой скорости с помощью объемных акустических волн, [патент №2392625 «Способ измерения угловой скорости», опубл. 20.06.2010], который наиболее близок по реализации к предлагаемому, отличается тем, что сигналом на входе является линейно поляризованная сдвиговая волна, сигналом на выходе является также линейно поляризованная сдвиговая волна, но с вектором поляризации, повернутым на 90° относительно излученной.
Чувствительный элемент содержит твердотельный звукопровод, выполненный из материала, обладающего минимальной скоростью распространения сдвиговых волн, поскольку уровень информативного сигнала обратно пропорционален скорости распространения сдвиговых волн. На плоскопараллельных торцах звукопровода размещают пластинчатые пьезоэлектрические излучающие и приемные преобразователи. Излучающий пьезопреобразователь возбуждает в звукопроводе линейно поляризованную сдвиговую волну. Приемный преобразователь линейно поляризованной сдвиговой волны имеет угол поляризации близким к 90° относительно излучаемой сдвиговой волны. Таким образом, приемный преобразователь принимает ортогональные компоненты сдвиговой поляризации, возникающие в излученной волне по мере распространения в звукопроводе в условиях вращения. Достоинством способа является устойчивость к механическим нагрузкам.
Недостатками способа являются необходимость размещения преобразователей на звукопроводе и необходимость точной юстировки осей поляризации излучающего и приемного пьезопреобразователей.
Задачей настоящего изобретения является разработка способа измерения угловой скорости, отличающегося простой реализацией.
Поставленная задача решается за счет того, что в предлагаемом способе измерения угловой скорости, так же, как и в известном излучают линейно поляризованную волну, но в отличие от известного, в предлагаемом способе принимают вид линейно поляризованной волны, не совпадающий с излученной.
Техническим результатом является упрощение способа измерения угловой скорости.
Технический результат достигается за счет того, что преобразователи размещают на объекте измерения, чья угловая скорость которого надлежит измерению, и за счет того, что не требуется юстировка осей поляризации преобразователей.
Пьезопреобразователь излучает объемную линейно поляризованную волну, которая распространяется перпендикулярно оси вращения среды распространения. В условиях вращения излученная линейно поляризованная волна, например, сдвиговая, представляет собой две волны эллиптической поляризации. Частицы в этих волнах колеблются вдоль двух осей, ортогональных оси вращения, а волны распространяются с разными скоростями. Таким образом, в условиях вращения, приемный пьезопреобразователь принимает продольную компоненту вектора поляризации.
Сущность способа измерения угловой скорости вращения объекта поясняется чертежами, где:
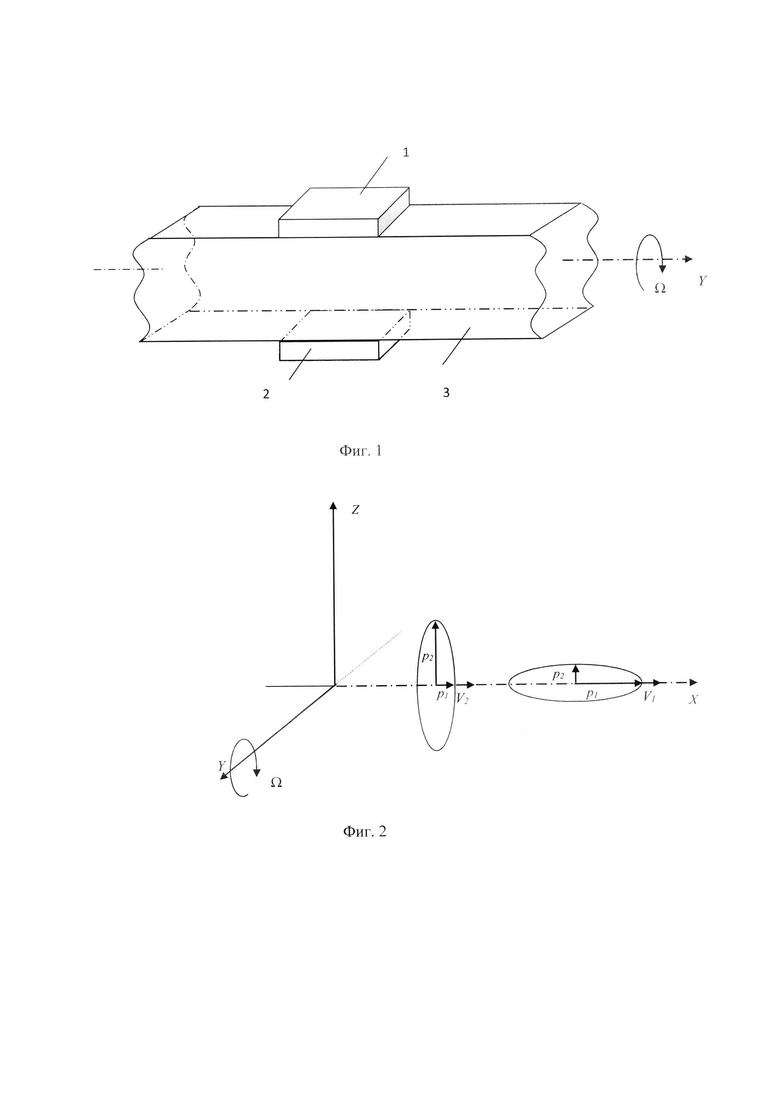
на фиг. 1 представлено графическое пояснение схемы реализации способа измерение
на фиг. 2 схематически изображены траектории движения частиц в распространяющихся волнах.
Рассмотрим более подробно последовательность действий предлагаемого способа. На фиг. 1 показаны излучающий пластинчатый пьезопреобразователь 1, и приемный пластинчатый пьезопреобразователь 2, которые размещают на измерительном объекте 3, вращающийся вокруг оси Y. Пьезопреобразователь 1 излучает линейно поляризованную волну, например, сдвиговую, которая в условиях вращения объекта вокруг оси Y, представляет собой совокупность двух волн эллиптической поляризации. Пьезопреобразователь продольной поляризации 2 при наличии вращения принимает продольную компоненту волн эллиптической поляризации, которая пропорциональна скорости вращения объекта 3. При отсутствии вращения принимаемый сигнал на приемном пьезопреобразователе 2 отсутствует.
Для проведения измерения угловой скорости вращения преобразователи размещают на конструктивных частях объекта. В качестве элементов конструкции могут использоваться ребра жесткости из изотропных материалов, например, металлов, имеющих доступные для размещения преобразователей плоскопараллельные торцы. Таким образом, для определения угловой скорости указанным способом не требуется размещения дополнительного звукопровода.
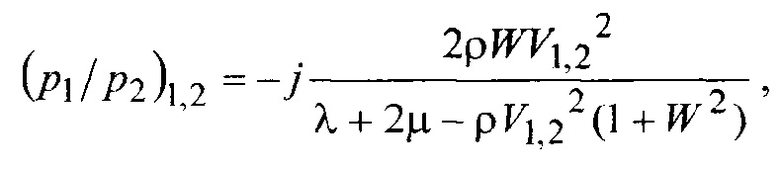
Фиг. 2 демонстрирует траектории движения частиц в волнах, распространяющихся вдоль оси X, в случае вращения измерительного объекта вокруг оси Y. Излученная при таких условиях линейно поляризованная сдвиговая волна с вектором смещения вдоль оси Z раскладывается на две волны эллиптической поляризации, которые распространяются с различными скоростями квазипродольной волны V1 и квазипоперечной волны V2.

где ρ - плотность материала объекта; λ и μ - постоянные Ламе, W=Ω/2πƒ относительная частота вращения объекта, Ω - скорость вращения объекта, ƒ - линейная частота ультразвуковых колебаний.
В этих волнах смещения частиц происходят не только вдоль оси Z (сдвиговая компонента), но и вдоль оси X (продольная компонента). Таким образом, излученная линейно поляризованная волна является совокупностью двух волн эллиптической поляризации, смещения в которых происходят вдоль оси Z и вдоль оси X. Отношения осей эллипсов поляризации двух этих волн (p1/p2)1 и (p1/р2)2 пропорциональны Ω:
Отношение длин осей эллипса также однозначно зависит при заданной частоте вращения от коэффициента Пуассона v:
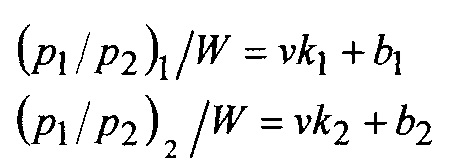
Величины k1=k2=-4.023 и b1=4.002, b2=2.002 позволяют определить характер движения частиц среды в зависимости от скорости вращения для любого материала по известному коэффициенту Пуассона v.
Определим амплитуду выходного напряжения Uвых1 на приемном пьезопреобразователе, которая пропорциональна скорости вращения, для излучения сдвиговой волны, а приема продольной, по формуле:

где: Uвx - напряжение, подаваемое на излучающий преобразователь; Как - коэффициент передачи акустического тракта датчика.
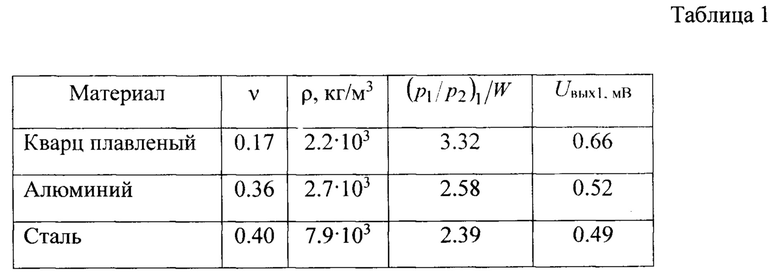
В таблице 1 представлены отношения осей эллипсов поляризации, приведенные к W, а также амплитуды выходного напряжения Uвых1 для различных материалов объекта, для излучения сдвиговой волны, а приема продольной, при Uвх=100 В, Ω=1 об/с, ƒ=0,5 МГц, Как=0 дБ.
Определим амплитуду выходного напряжения Uвых2 на приемном пьезопреобразователе, которая пропорциональна скорости вращения, для излучения продольной волны, а приема сдвиговой по формуле:
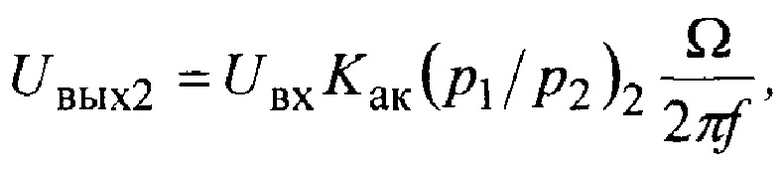
где: Uвх - напряжение, подаваемое на излучающий преобразователь; Как - коэффициент передачи акустического тракта датчика.
В таблице 2 представлены отношения осей эллипсов поляризации, приведенные к W, а также амплитуды выходного напряжения Uвых2 для излучения продольной волны, а приема сдвиговой, для различных материалов объекта, при Uвх=100 В, Ω=1 об/с, ƒ ƒ=0,5 МГц, Как=0 дБ.
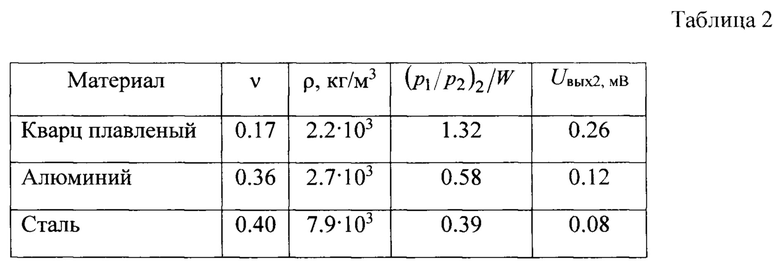
Как видно из таблиц 1 и 2, амплитуда выходного сигнала, при излучении сдвиговой волны, а приеме продольной, больше, чем при излучении продольной, а приеме сдвиговой.
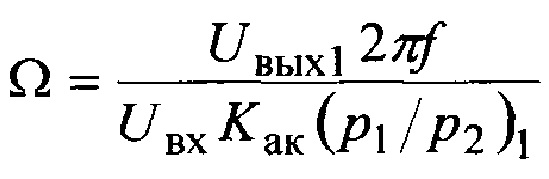
Таким образом, угловая скорость при излучении сдвиговой волны, а приеме продольной определяется следующим соотношением:
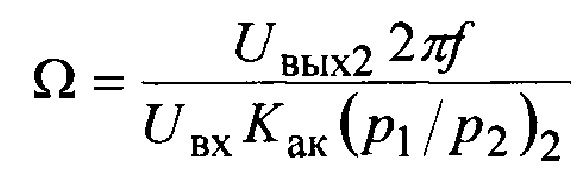
Угловая скорость при излучении продольной волны, а приеме сдвиговой определяется аналогичным соотношением:
Техническим результатом является упрощение способа измерения угловой скорости.
Технический результат достигается за счет того, что преобразователи размещают на объекте измерения, чья угловая скорость надлежит измерению, и за счет того, что не требуется юстировка осей поляризации преобразователей.
Была экспериментально подтверждена возможность использования такого способа для измерения скорости вращения на конструкции, в которой излучают объемную акустическую линейно поляризованную сдвиговую волну, а принимают линейно поляризованную продольную волну, которая появляется при вращении перпендикулярно направлению распространения. Для изготовления макета использовались пластинчатые пьезопреобразователи из пьезокерамики ЦТС-19 и измеряемый объект, выполненный из плавленого кварца, в виде цилиндра. Были получены качественные результаты зависимости информативного параметра от скорости вращения, подтверждающие их линейную связь, как для излучения линейно поляризованной сдвиговой волны, а приема продольной, так и для излучения линейно поляризованной продольной волны, а приема сдвиговой волны.
Описание изобретения свидетельствует о том, что предложен новый способ измерения угловой скорости, основанный на особенностях распространения объемных акустических волн, когда ось вращения объекта ортогональна направлению распространения волны. Достигнут технический результат - упрощение способа измерения угловой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА НА ЕГО ОСНОВЕ | 2012 |
|
RU2520949C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2392625C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2460078C1 |
| Чувствительный элемент гироскопа | 2021 |
|
RU2777296C1 |
| Тензодатчик (его варианты) | 1983 |
|
SU1138672A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА | 2011 |
|
RU2457436C1 |
| СЕЛЕКТИВНЫЙ АКУСТИКО-ЭМИССИОННЫЙ ПЬЕЗОПРЕОБРАЗОВАТЕЛЬ УПРУГИХ ВОЛН | 2011 |
|
RU2493672C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА | 2009 |
|
RU2397445C1 |
| УЛЬТРАЗВУКОВОЙ ДАТЧИК СДВИГОВЫХ ВОЛН | 2007 |
|
RU2365911C2 |
| Способ ультразвукового контроля изделий со сферической и цилиндрической поверхностью | 1982 |
|
SU1067432A1 |
Использование: для измерения угловой скорости. Сущность изобретения заключается в том, что осуществляют возбуждение и прием объемной акустической волны, прошедшей через измеряемый объект, выполненный из изотропного материала, при этом преобразователи размещают на измеряемом объекте и излучают линейно поляризованную волну, а принимают вид линейно поляризованной волны, не совпадающий с излученной, и по амплитуде принятой волны определяют угловую скорость вращения объекта. Технический результат: упрощение измерения угловой скорости. 2 ил.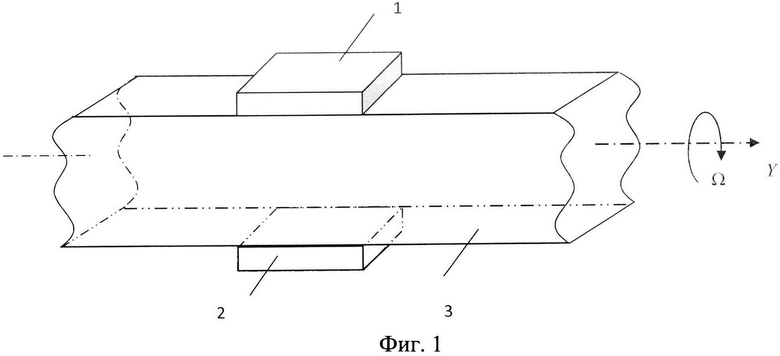
Ультразвуковой способ измерения угловой скорости путем возбуждения и приема объемной акустической волны, прошедшей через измеряемый объект, выполненный из изотропного материала, отличающийся тем, что преобразователи размещают на измеряемом объекте и излучают линейно поляризованную волну, а принимают вид линейно поляризованной волны, не совпадающий с излученной, и по амплитуде принятой волны определяют угловую скорость вращения объекта.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2392625C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2460078C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2010 |
|
RU2426131C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2012 |
|
RU2529824C2 |
| Способ контроля упругих постоянных сред | 1989 |
|
SU1682910A1 |
| WO 2008000310 A1, 03.01.2008. | |||

