Изобретение относится к медицинским диагностическим способам исследования физиологических функций живых организмов, в частности к радиолокационным сверхширокополосным способам диагностики параметров дыхания и сердцебиения пациентов.
Известен способ мониторинга физиологических параметров одного и более органов тела пациента с использованием импульсного сверхширокополосного радара малой мощности - заявка US №2004/0249258 А1, кл. А61В 5/05, 2004. В качестве опорного зондирующего сигнала используются короткие видеоимпульсы. Способ позволяет осуществить расширенную статистическую обработку отраженных от исследуемых объектов пациента сигналов. Используемая в способе одноканальная схема обработки сигнала не позволяет получить информацию о физиологических параметрах исследуемого объекта с требуемой степенью достоверности в любой точке на рабочей дистанции, т.к. между радаром и исследуемым объектом появляются так называемые «слепые» зоны, в которых фазовая чувствительность радара существенно снижается, хотя амплитуда отраженных от объекта зондирующих сигналов может быть достаточно большой. Наличие «слепых» зон и малая ширина участка дальности радара, которая определяется длительностью опорных сигналов, снижает точность измерений физиологических параметров пациента в определенных зонах рабочей дистанции, в связи с чем такой способ может применяться только при условии полной неподвижности пациента на строго фиксированном расчетном расстоянии.
Известен способ измерения физиологических параметров тела пациента - патент US №4085740, кл. А61В 5/02, 1978. Способ включает излучение модулированного СВЧ-сигнала в сторону исследуемого объекта, прием отраженного от исследуемого объекта сигнала, одновременное смешивание отраженного сигнала с излучаемым СВЧ-сигналом, в одном канале и со сдвинутым на 90° по фазе излучаемым СВЧ-сигналом в другом канале, детектирование и демодуляцию полученных после смешивания сигналов в каждом канале, выделение сигнала, характеризующего дыхание, и сигнала, характеризующего частоту сердцебиения обследуемого объекта. В связи с тем, что обработка сигналов после их смешивания происходит независимо друг от друга, способу присущи те же недостатки: выходной сигнал радара обладает малой информативностью вследствие возникновения «слепых» зон, в которых радар не может одновременно измерять параметры дыхания и сердцебиения; применение способа ограничивается фиксированным расстоянием между радаром и пациентом; исключается применение параметров перемещения обследуемого объекта только в частном случае, когда в поле зрения датчика присутствует только один движущийся объект, например грудная клетка обследуемого объекта, восстановив закон движения объекта согласно следующим зависимостям:


где Z1 (t) - выходной сигнал синфазного канала приемника;
Z2 (t) - выходной сигнал квадратурного канала приемника;
Em=EoE1nTo/2 - максимальная энергия взаимодействия отраженного и зондирующего сигналов, выделяющаяся на выходной нагрузке с единичным сопротивлением;
Е0- максимальная амплитуда зондирующего сигнала;
E1 - максимальная амплитуда принятого отраженного сигнала;
Тo - период колебаний зондирующего сигнала;
n - целое число периодов колебаний, заполняющих импульс зондирования;
φ1 - фазовый сдвиг, обусловленный расстоянием между обследуемым объектом и датчиком;
φ(t) - мгновенное значение фазы, обусловленное движением обследуемого объекта;
λ - длина волны колебаний, заполняющих зондирующий сигнал;
t - текущее время;
Однако реально зондирующий сигнал отражается не только от грудной клетки обследуемого объекта, но и от движущегося самого объекта (пациента) и от находящихся в зоне излучения зондирующих радиоимпульсов неподвижных объектов, в том числе от подстилающей поверхности, что вносит погрешность в достоверность вычисления функции и параметров движения обследуемого объекта.
Целью настоящего изобретения является создание способа дистанционного определения параметров дыхания и сердцебиения по движению грудной клетки обследуемого объекта, позволяющего повысить точность и достоверность измерений параметров дыхания и сердцебиения пациентов, за счет повышения фазовой чувствительности диагностики обследуемого объекта, исключения «слепых» зон на всей рабочей дистанции зондирования даже при перемещении обследуемого пациента, а также повысить точность воспроизведения функции движения и параметров обследуемого объекта, в том числе за счет учета отраженного сигнала от неподвижных объектов, находящихся вблизи обследуемого объекта в зоне излучения зондирующих радиоимпульсов.
Способ дистанционного определения параметров дыхания и сердцебиения включает формирование периодической последовательности СВЧ радиоимпульсов определенной длительности, формирование зондирующих радиоимпульсов из СВЧ радиоимпульсов, формирование опорных радиоимпульсов из СВЧ радиоимпульсов, формирование из опорных радиоимпульсов радиоимпульсов, сдвинутых по фазе на 90° относительно опорных радиоимпульсов; излучение зондирующих радиоимпульсов в сторону обследуемой части тела объекта; прием в интервалах между зондирующими радиоимпульсами отраженных от обследуемого объекта радиоимпульсов; корреляцию каждого отраженного радиоимпульса с опорным радиоимпульсом с последующим выделением низкочастотной составляющей последовательности выходных сигналов корреляции, соответствующей комбинации сигналов, вызванных механическими перемещениями обследуемого объекта, и сигнала, вызванного неподвижными объектами, включая подстилающую поверхность, находящимися в зоне излучения зондирующих импульсов; корреляцию каждого отраженного радиоимпульса со сдвинутым по фазе на 90° радиоимпульсом с последующим выделением низкочастотной составляющей последовательности выходных сигналов корреляции, соответствующей комбинации сигналов, вызванных механическими перемещениями обследуемого объекта, и сигнала, вызванного неподвижными объектами, включая подстилающую поверхность, находящимися в зоне излучения зондирующих импульсов; определение наличия сигнала от движущегося объекта, включающего сигнал, соответствующий движению грудной клетки объекта с учетом возможного перемещения обследуемого объекта при его облучении зондирующими радиоимпульсами; определение наличия сигнала, соответствующего движению грудной клетки; компенсация сигнала, отраженного от неподвижных объектов, включая подстилающую поверхность, на которой находится обследуемый объект, расположенных в зоне излучения зондирующих импульсов; выделение сигнала, соответствующего движению грудной клетки с определением закона движения грудной клетки во времени; децимацию с усреднением сигнала, соответствующего движению грудной клетки с возможностью обеспечения требуемой точности измерения параметров дыхания и сердцебиения; выделение из сигнала, соответствующего движению грудной клетки, сигнала, вызванного сердцебиением; определение частоты сердцебиения; выделение из сигнала, соответствующего движению грудной клетки, сигнала, вызванного дыханием; определение частоты дыхания.
При этом суммарная длительность зондирующего и опорного радиоимпульсов равна времени, т.к. отсутствует постороннее влияние на разность фаз опорного и принятого отраженного радиосигналов.
Разделение во времени режимов излучения зондирующих радиоимпульсов и приема отраженных от обследуемого объекта радиоимпульсов позволяет, во-первых, в режиме излучения исключить прямое прохождение зондирующих сигналов, что снижает требования к динамическому диапазону приема отраженных радиоимпульсов, а во-вторых, обеспечить защитный интервал (по дальности), в пределах которого прием отраженных сигналов не ведется, что повышает помехозащищенность приема от значительных пассивных помех, создаваемых расположенными в непосредственной близости предметами и подстилающей поверхностью.
Определение наличия сигнала от движущегося объекта, включающего сигнал движения грудной клетки обследуемого объекта с учетом возможного перемещения обследуемого объекта при его облучении зондирующими радиоимпульсами, позволяет провести предварительный анализ целесообразности проведения дальнейших измерений, т.е. дать оценку наличия или отсутствия в отраженном сигнале полезного сигнала (сигнала, соответствующего движению грудной клетки), что повышает точность и достоверность измерений параметров дыхания и сердцебиения.
Компенсация сигнала, отраженного от неподвижных объектов, включая подстилающую поверхность, на которой находится обследуемый объект, расположенных в зоне излучения зондирующих импульсов, позволила повысить точность и достоверность измерений параметров дыхания и сердцебиения.
Применение децимации с усреднением сигнала, соответствующего движению грудной клетки, позволяет дополнительно осуществлять фильтрацию сигнала от помех, а также понизить частоту дискретизации, что повышает точность измерения параметров дыхания и сердцебиения.
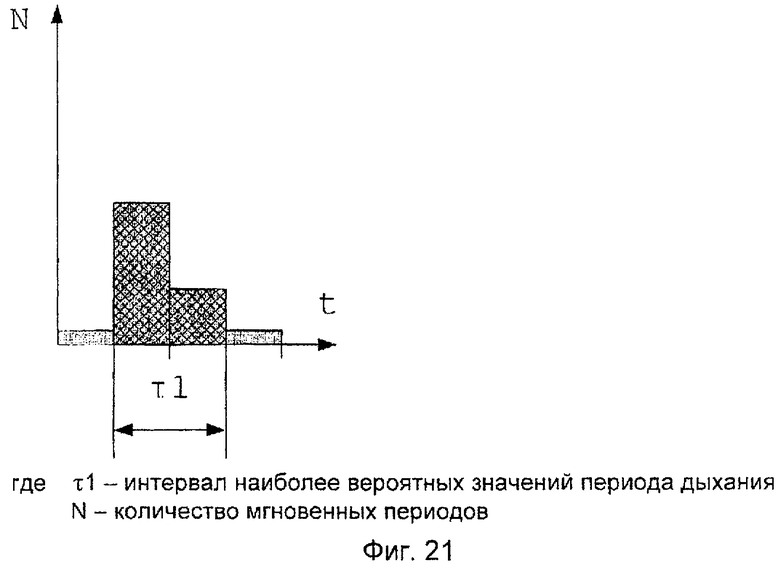
Построение гистограмм из значений периодов мгновенных частот сигналов, соответствующих дыханию (дыхательных сокращений) и сердцебиению (сердечных сокращений), позволяет исключить ложные значения и повысить точность и достоверность измерений параметров дыхания и сердцебиения.
Краткое описание фигур.
Фиг.1 - структурная схема устройства для реализации заявленного способа.
Фиг.2 - временная диаграмма сигнала на выходе генератора СВЧ радиосигнала.
Фиг.3 - временная диаграмма сигнала на входе формирователя зондирующего сигнала.
Фиг.4 - временная диаграмма сигнала на входе формирователя опорных сигналов.
Фиг.5 - временная диаграмма зондирующего сигнала на выходе антенны.
Фиг.6 - временная диаграмма отраженного сигнала на входе синфазного и квадратурного каналов приемника.
Фиг.7 - временная диаграмма процесса перемножения опорного и отраженного от
обследуемого объекта сигналов в корреляторе синфазного канала приемника.
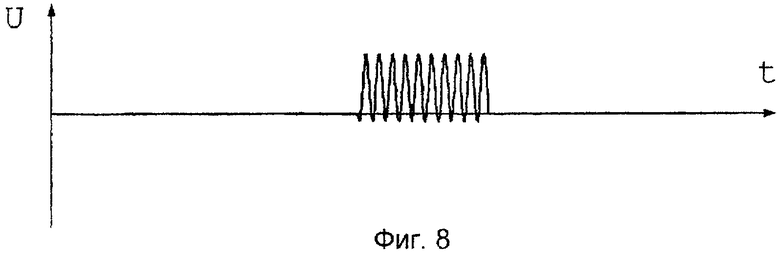
Фиг.8 - временная диаграмма процесса перемножения сдвинутого по фазе на 90° опорного и отраженного от обследуемого объекта сигналов в корреляторе квадратурного канала приемника.
Фиг.9 - временная диаграмма сигнала на выходе коррелятора синфазного канала приемника.
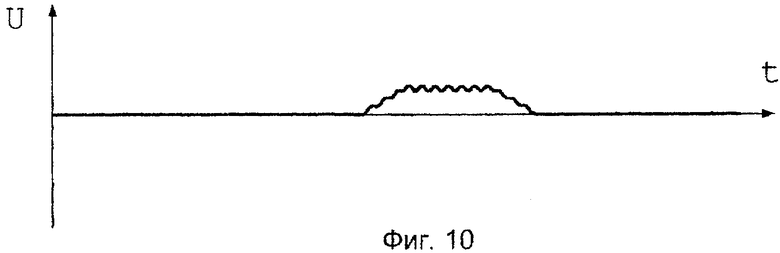
Фиг.10 - временная диаграмма сигнала на выходе коррелятора квадратурного канала приемника.
Фиг.11 - временная диаграмма низкочастотного сигнала на выходе синфазного канала приемника, где а - фрагмент сигнала, соответствующего возвратно-поступательному движению только грудной клетки обследуемого объекта; в - фрагмент сигнала, соответствующего движению обследуемого объекта в направлении источника зондирующих импульсов; с - фрагмент сигнала, в котором отсутствует какое-либо движение в зоне облучения зондирующими импульсами.
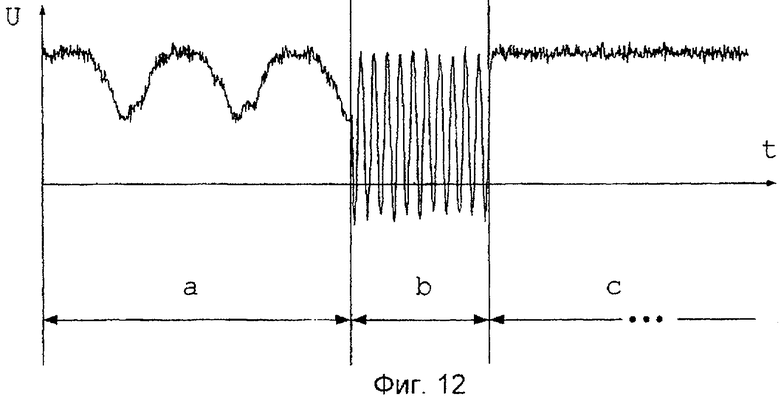
Фиг.12 - временная диаграмма низкочастотного сигнала на выходе квадратурного канала приемника, где а - фрагмент сигнала, соответствующего возвратно-поступательному движению только грудной клетки обследуемого объекта; в - фрагмент сигнала, соответствующего движению обследуемого объекта в направлении источника зондирующих импульсов; с - фрагмент сигнала, в котором отсутствует какое-либо движение в зоне облучения зондирующими радиоимпульсами.
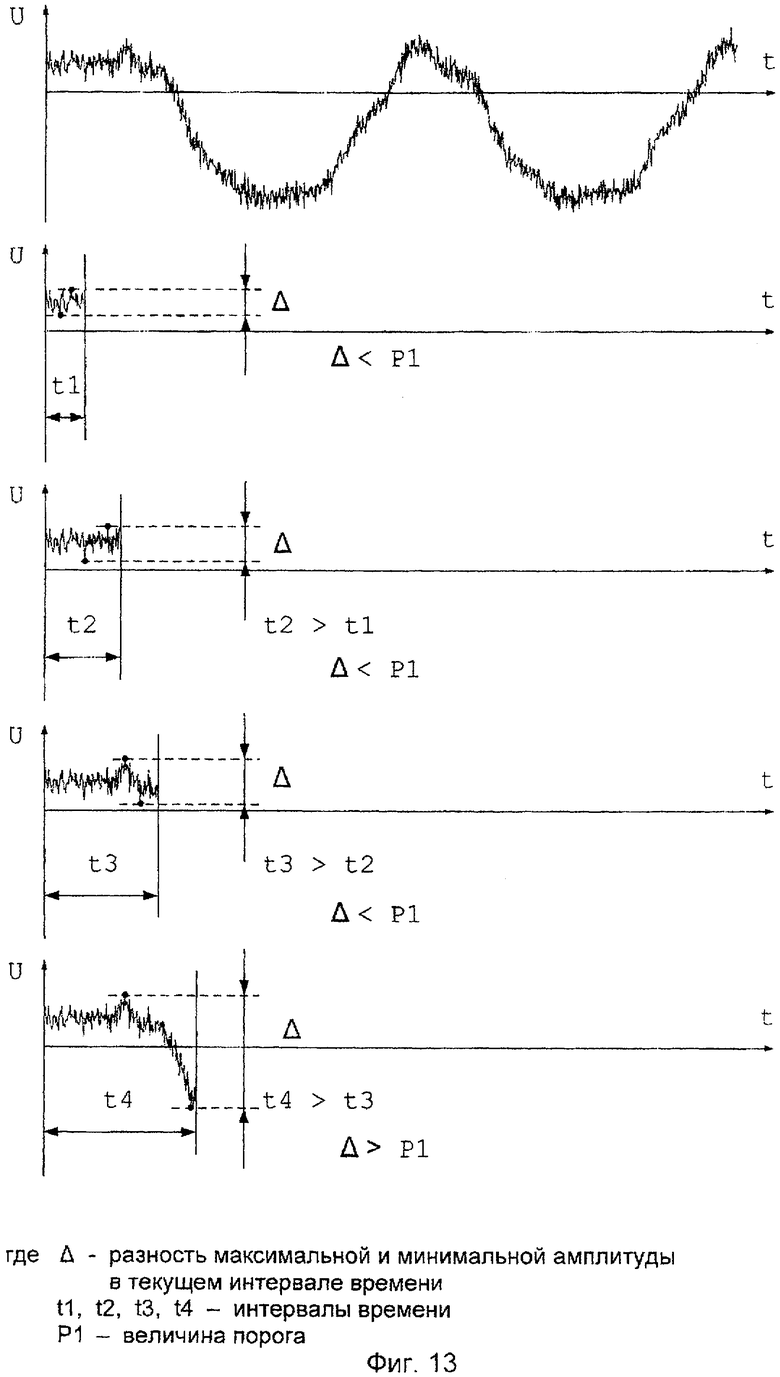
Фиг.13 - временная диаграмма выделения каких-либо механических перемещений в зоне облучения зондирующими импульсами на примере фрагмента сигнала синфазного канала приемника, соответствующего возвратно-поступательному движению грудной клетки обследуемого объекта.
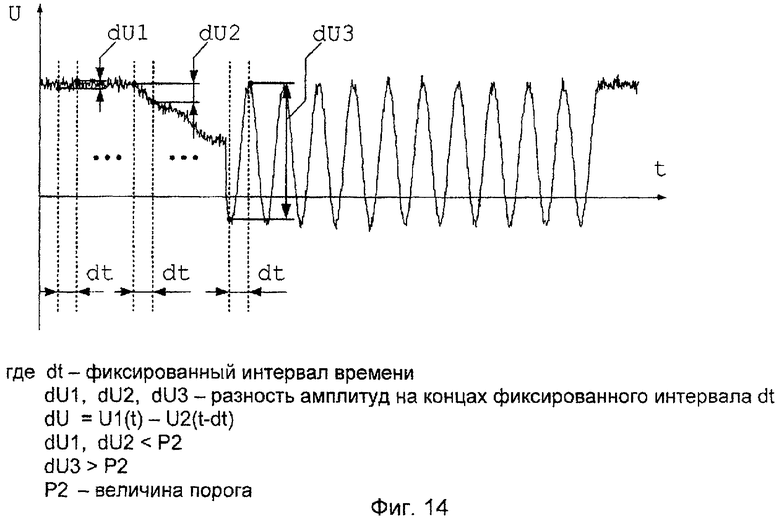
Фиг.14 - временная диаграмма выделения механических перемещений, не соответствующих перемещениям грудной клетки в зоне облучения зондирующими радиоимпульсами на примере фрагмента сигнала квадратурного канала приемника, соответствующего прямолинейному движению обследуемого объекта в направлении к или от источника зондирующих радиоимпульсов.
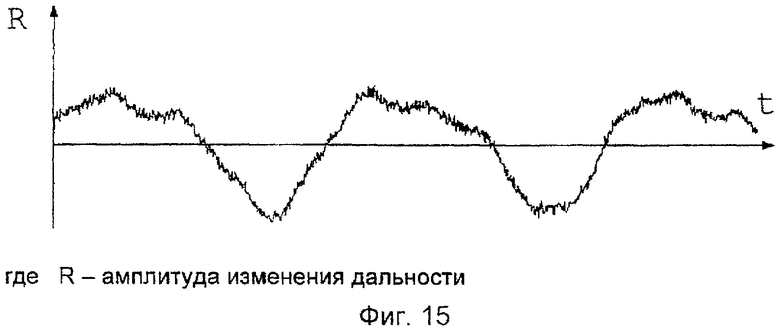
Фиг.15 - временная диаграмма сигнала на выходе блока вычисления, соответствующего движению грудной клетки обследуемого объекта.
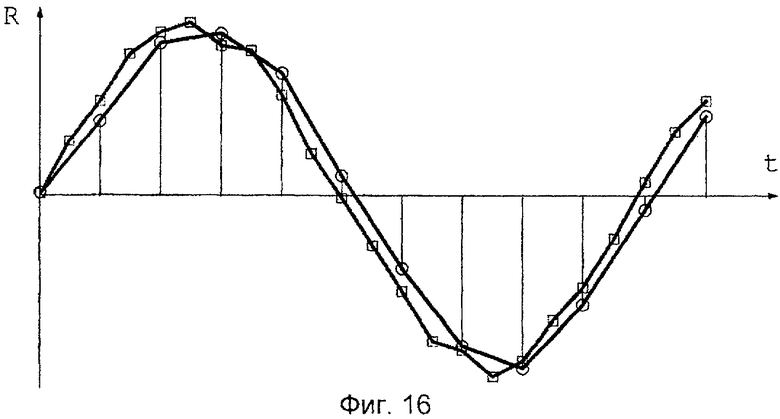
Фиг.16 - временная диаграмма сигнала на выходе дециматора.
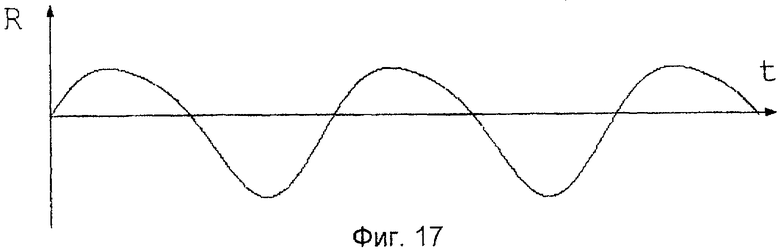
Фиг.17 - временная диаграмма зависимости амплитуды движения грудной клетки, определяемого только дыханием обследуемого объекта.
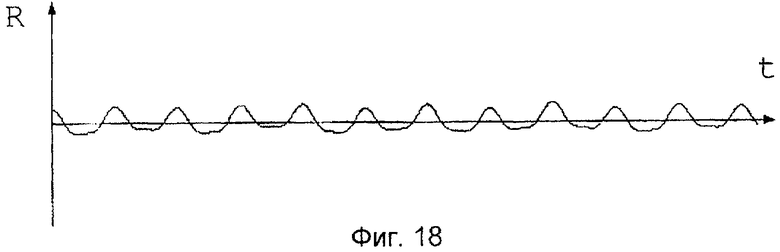
Фиг.18 - временная диаграмма зависимости амплитуды движения грудной клетки, определяемого только сердцебиением обследуемого объекта.
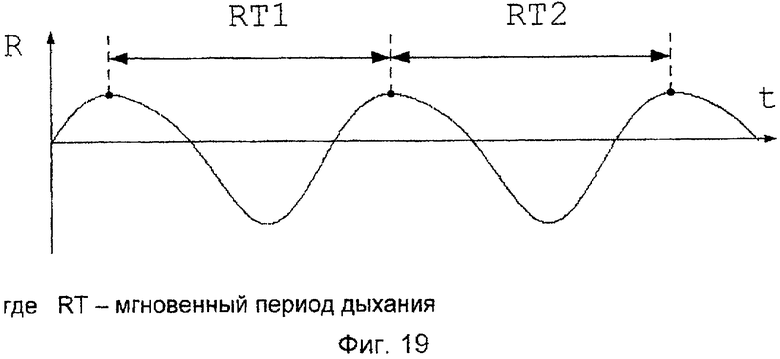
Фиг.19 - временная диаграмма, иллюстрирующая принцип определения мгновенного периода дыхания обследуемого объекта по найденным локальным максимумам.
Фиг. 20 - временная диаграмма, иллюстрирующая принцип определения мгновенного периода сердцебиения обследуемого объекта по найденным локальным максимумам.
Фиг. 21 - гистограмма определения частоты дыхания, построенная по результатам определения мгновенных периодов дыхания.
Фиг. 22 - гистограмма определения частоты сердцебиения, построенная по результатам определения мгновенных периодов сердцебиения.
Способ согласно изобретению может быть реализован при помощи устройства (фиг. 1), включающего генератор 1 СВЧ радиосигнала, выход которого через управляемый электронный ключ 2 соединен со входами формирователя 3 зондирующего сигнала и формирователя 4 опорных сигналов, приемно-передающую антенну 5 с управляемым антенным переключателем 6, приемник 7 отраженного сигнала, состоящий из синфазного 8 и квадратурного 9 каналов, каждый из которых состоит из последовательно соединенных коррелятора и фильтра низкой частоты (ФНЧ), вход антенного переключателя 6 соединен с выходом формирователя 3, а выход - с входами коррелятора 10 синфазного 8 и коррелятора 11 квадратурного 9 каналов приемника 7, выход формирователя 4 опорного сигнала соединен с вторым входом коррелятора 10 синфазного канала 8 приемника 7 и через фазосдвигатель 12 на 90° с вторым входом коррелятора 11 квадратурного канала 9 приемника 7, выход коррелятора 10 через ФНЧ 13 соединен с входом второго управляемого ключа 15 и первым входом блока 16 анализа, выход коррелятора 11 через ФНЧ 14 соединен с входом третьего управляемого ключа 17 и вторым входом блока 16 анализа, первый выход которого соединен с входом управления электронного ключа 15, а второй выход соединен с входом управления электронного ключа 17, выходы электронных ключей через блок 18 корректировки соединены с входами блока 19 обработки, выход которого соединен с дециматором 20. Выход дециматора 20 соединен с входами канала 21 определения частоты дыхания и канала 22 определения частоты сердцебиения. Канал 21 определения частоты дыхания включает последовательно соединенные фильтр 23 низкой частоты, блок 24 передачи данных, блок 25 определения мгновенного периода сигнала дыхания и блок 26 определения частоты дыхания. Канал 22 определения частоты сердцебиения включает последовательно соединенные полосовой фильтр 27, блок 28 передачи данных, блок 29 определения мгновенного периода сигнала сердцебиения и блок 30 определения частоты сердцебиения. Выходы блока 26 определения частоты дыхания и блока 30 определения частоты сердцебиения соединены с блоком 31 отображения информации. Входы управления генератора 1 СВЧ сигнала, электронного ключа 2 и антенного переключателя 6 соединены с блоком 32 управления и синхронизации.
Устройство работает следующим образом. После поступления сигнала запуска с блока 32 управления и синхронизации генератор 1 формирует относительно длинные радиоимпульсы (фиг.2) длительностью 10-21 нс с частотой заполнения ~6,5 ГГц и частотой повторения, зависящей от сигнала запуска, например, при дальности действия датчика до 2-х метров -1...2 МГц.
Из сигнала, поступающего из генератора 1, управляемый электронный ключ 2 выделяет зондирующий сигнал (фиг.3) длительностью ~ 2 нс, поступающий через формирователь 3 зондирующего сигнала на вход управляемого электронного переключателя 6, и опорный сигнал (фиг.4) длительностью порядка 8-19 нс, поступающий через формирователь 4 опорных сигналов на вход коррелятора 10 синфазного канала 8 приемника 7, а через формирователь 4 опорных сигналов и фазосдвигатель 12 на вход коррелятора 11 квадратурного канала 9 приемника 7. Нестабильность положения поступающего из блока 32 управления и синхронизации сигнала управления электронным ключом 2 во времени не влияет на разность фаз опорного и принятого отраженного сигналов в корреляторах 10 и 11, так как эти сигналы сформированы из одного СВЧ сигнала.
Формирователь 3 зондирующего сигнала удаляет низкочастотные гармоники сигналов управления электронным ключом 4 путем фильтрации сигнала с частотой среза ~ 5,5 ГГц и усиливает сигнал зондирования с возможностью регулирования коэффициента усиления до уровня, необходимого для работы устройства на заданной дальности. Антенный переключатель 6 обеспечивает работу приемно-передающей антенны 5 в двух режимах - на передачу и на прием. По умолчанию антенна 5 работает в режиме приема отраженного от обследуемого объекта сигнала, а при подаче сигнала с блока 32 управления и синхронизации на управляющий вход антенного переключателя 6 антенна работает в режиме передачи зондирующего сигнала (фиг.5).
Отраженный от обследуемого объекта сигнал (фиг.6) с задержкой, равной времени распространения сигнала до объекта и обратно, поступает на антенный переключатель 6, который после излучения зондирующего импульса был переключен обратно в положение «прием». Далее сигнал поступает в коррелятор 10 синфазного канала 8 приемника 7, где происходит его перемножение (фиг.7) с опорным радиоимпульсом, и в коррелятор 11 квадратурного канала 9 приемника 7, где происходит его перемножение (фиг.8) с сдвинутым по фазе на 90° фазосдвигателем 12 опорным радиоимпульсом. Такая работа устройства в режиме приема отраженного сигнала позволяет обеспечить защитный интервал (по дальности), в пределах которого прием отраженных сигналов не ведется. Это позволяет повысить помехозащищенность приемника 7 от значительных пассивных помех, создаваемых расположенными в непосредственной близости от приемно-передающей антенны 5 предметами.
Выходные сигналы корреляторов (фиг.9 и 10 соответственно) проходят ФНЧ 13 и 14 с частотой среза ~30 Гц. На выходе ФНЧ 13 и 14 получаем сигналы, соответствующие изменению фазы принятого отраженного от обследуемого объекта сигнала, по отношению к опорным сигналам (фиг.11 и 12 соответственно). После фильтрации сигнал с ФНЧ 13 поступает на вход блока 16 анализа, а с ФНЧ 14 поступает на второй вход блока 16 анализа.
В блоке 16 анализа определяется наличие любых механических движений в зоне зондирования обследуемого объекта. Диапазон возможных значений параметров этого движения, например скорость или амплитуда движения при возвратно-поступательном характере движения, определяются полосой пропускания синфазного 8 и квадратурного 9 каналов приемника 7. Если амплитуда выходных сигналов приемника 7, соответствующих движению, больше порогового значения, то принимается решение об обнаружении в зоне действия приемника 7 двигающегося объекта (фиг.13). Значение порога обнаружения определяется вероятностью ложного обнаружения. Например, значение порога может быть определено эмпирическим путем, на основе статистических априорных данных наблюдения в конкретной ситуации. Одновременно с этим оценивается амплитуда механических движений с большой амплитудой. Под большой амплитудой подразумевается такая амплитуда движения, которая превышает максимально возможную амплитуду движения грудной клетки обследуемого объекта, например, в 5 раз. При этом в спектре выходных сигналов каналов приемника 7 появляются спектральные составляющие с частотой более 10 Гц. Так как процесс расчета частотного спектра достаточно ресурсоемкий и требующий достаточно большого времени, может быть применен временной метод определения движения с большой амплитудой. Он заключается в сравнении с порогом абсолютной разности амплитуд сигнала взятых в двух точках через 0,05 секунд, что соответствует прямолинейному движению объекта со скоростью около 0,25 м/с. Если порог превышен, то принимается решение о наличии движения с большой амплитудой (фиг.14). При выполнении условия наличия любого движения и отсутствия большого движения, т.е. при наличии полезного сигнала, соответствующего сигналу колебаний грудной клетки обследуемого объекта, сигналы с ФНЧ 13 и 14 через электронные ключи 15 и 17 поступают на блок 18 корректировки. Блок 18 отфильтровывает сигналы обоих каналов приемника 7 от постоянных составляющих, обусловленных отражениями сигналов зондирования от неподвижных объектов, включая подстилающую поверхность (пол, потолок, мебель и т.п.), которые вносят значительную ошибку в дальнейшие вычисления функции движения обследуемого объекта и должны быть учтены при расчетах.
Далее скорректированные сигналы приемника поступают на блок 19 обработки. В блоке 19 обработки вычисляется арктангенс отношения двух скорректированных сигналов каналов приемника 7.

где Z11(t) - скорректированный сигнал синфазного канала приемника;
Z22(t) - скорректированный сигнал квадратурного канала приемника;
С - скорость света;
f0 - средняя частота спектра сигналов зондирования.
После вычисления аргумента (объединения квадратур) на выходе блока 19 мы располагаем функцией движения обследуемого объекта измерений, максимально приближенной к истинной функции движения. В частности, мы располагаем функцией движения грудной клетки, которая помимо дыхательных движений включает в себя движения, вызванные сердцебиением (фиг.15). Сигнал с выхода блока 19 через дециматор 20 поступает на входы канала 21 определения частоты дыхания и канала 22 определения частоты сердцебиения. Дециматор 20 осуществляет децимацию сигнала с усреднением (фиг.16), что позволяет обеспечить требуемую точность измерения параметров дыхания и сердцебиения, а также дополнительно фильтровать сигнал от помех. После децимации ФНЧ 23 с полосой среза ~ 0,66 Гц выделяет сигнал, обусловленный только дыханием обследуемого объекта (фиг.17), а полосовой фильтр 27 с полосой 0,75-3 Гц выделяет сигнал, обусловленный только сердцебиением обследуемого объекта (фиг.18). В блоках 24 и 28 в течение ~ 1 мин происходит накопление полученных сигналов, после чего в блоках 25 и 29 периодически каждую секунду происходит определение мгновенного периода сигнала дыхания (фиг.19) и сердцебиения (фиг.20) соответственно. По результатам определения мгновенных периодов сигналов дыхания и сердцебиения в блоках 26 и 30 строятся гистограммы, по которым и определяется частота дыхания (фиг.21) и сердцебиения (фиг.22) соответственно. В блоке 31 проводится отображение результатов дистанционного определения параметров и состояния дыхательной и сердечно-сосудистой систем обследуемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ СВЕРХШИРОКОПОЛОСНЫЙ ДАТЧИК ДИСТАНЦИОННОГО МОНИТОРИНГА ДЫХАНИЯ И СЕРДЦЕБИЕНИЯ | 2008 |
|
RU2392852C2 |
| ИМПУЛЬСНЫЙ СВЕРХШИРОКОПОЛОСНЫЙ ДАТЧИК | 2008 |
|
RU2369323C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ОРГАНИЗМА | 2005 |
|
RU2295911C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО БЕСКОНТАКТНОГО МОНИТОРИНГА ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ЧЕЛОВЕКА | 2010 |
|
RU2462990C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2442186C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ И ИЗМЕРЕНИЯ ИХ ПАРАМЕТРОВ ДВИЖЕНИЯ В ЗОНЕ СЕЛЕКЦИИ И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2021 |
|
RU2783402C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО БЕСКОНТАКТНОГО МОНИТОРИНГА ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ЖИВОГО ОРГАНИЗМА | 2012 |
|
RU2533683C2 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2803413C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2260816C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ЖИВОГО ОБЪЕКТА И МИКРОВОЛНОВЫЙ ЛОКАТОР ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1997 |
|
RU2159942C1 |




Изобретение относится к способам исследования физиологических функций живых организмов, в частности к радиолокационным сверхширокополосным способам диагностики параметров дыхания и сердцебиения пациентов. Способ включает формирование периодической последовательности СВЧ радиоимпульсов определенной длительности, зондирующих радиоимпульсов, опорных радиоимпульсов и из опорных радиоимпульсов, сдвинутых по фазе на 90° относительно опорных радиоимпульсов. Зондирующие радиоимпульсы излучают в сторону обследуемой части тела и принимают в интервалах отраженных радиоимпульсов. Корреляция каждого отраженного радиоимпульса с опорным радиоимпульсом проводится с последующим выделением низкочастотной составляющей выходных сигналов корреляции, соответствующей комбинации сигналов, вызванных перемещениями обследуемого объекта и сигнала, вызванного неподвижными объектами, находящимися в зоне излучения зондирующих импульсов, и каждого отраженного радиоимпульса со сдвинутым по фазе на 90° с последующим выделением низкочастотной составляющей, соответствующей комбинации сигналов, вызванных перемещениями обследуемого объекта, и сигнала, вызванного неподвижными объектами. После чего определяют наличие сигнала, соответствующего движущемуся объекту, включающего сигнал, соответствующий движению грудной клетки обследуемого объекта с учетом возможного перемещения обследуемого объекта при его облучении зондирующими радиоимпульсами, и определяют наличие сигнала, соответствующего движению грудной клетки. Проводят компенсацию сигнала, отраженного от неподвижных объектов, включая подстилающую поверхность, на которой находится обследуемый объект, расположенных в зоне излучения зондирующих импульсов. Выделяют сигнал, соответствующий движению грудной клетки с определением закона движения грудной клетки во времени и проводят децимацию с усреднением сигнала, соответствующего движению грудной клетки с возможностью обеспечения требуемой точности измерения параметров дыхания и сердцебиения. Выделяют из сигнала, соответствующего движению грудной клетки, сигнал, вызванный сердцебиением, и определяют частоту сердцебиения. Затем выделяют из сигнала, соответствующего движению грудной клетки, сигнал, вызванный дыханием, и определяют частоту дыхания. Использование изобретения позволяет повысить точность и достоверность измерений параметров дыхания и сердцебиения за счет повышения фазовой чувствительности диагностики обследуемого объекта. 10 з.п. ф-лы, 22 ил.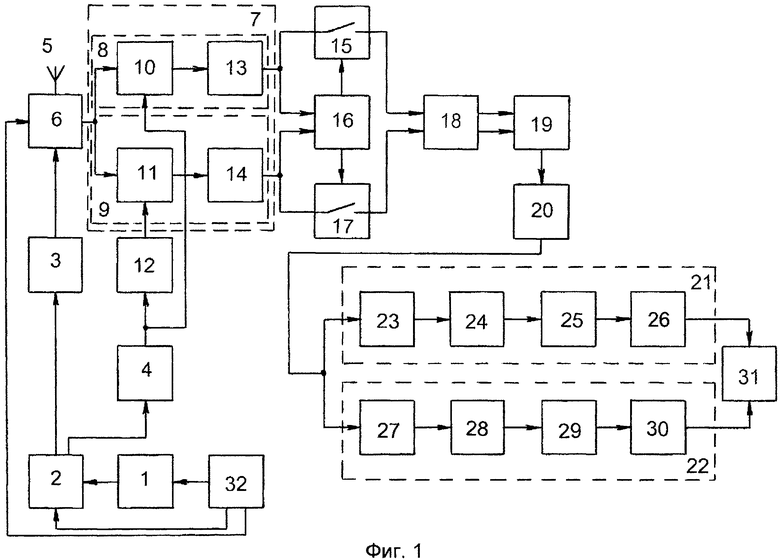
1. Способ дистанционного определения параметров дыхания и сердцебиения, включающий
формирование периодической последовательности СВЧ радиоимпульсов определенной длительности;
формирование зондирующих радиоимпульсов из СВЧ радиоимпульсов;
формирование опорных радиоимпульсов из СВЧ радиоимпульсов;
формирование из опорных радиоимпульсов радиоимпульсов, сдвинутых по фазе на 90° относительно опорных радиоимпульсов;
излучение зондирующих радиоимпульсов в сторону обследуемой части тела объекта;
прием в интервалах между зондирующими радиоимпульсами отраженных от обследуемого объекта радиоимпульсов;
корреляцию каждого отраженного радиоимпульса с опорным радиоимпульсом с последующим выделением низкочастотной составляющей последовательности выходных сигналов корреляции, соответствующей комбинации сигналов, вызванных механическими перемещениями обследуемого объекта и сигнала, вызванного неподвижными объектами, включая подстилающую поверхность, находящимися в зоне излучения зондирующих импульсов;
корреляцию каждого отраженного радиоимпульса со сдвинутым по фазе на 90° радиоимпульсом с последующим выделением низкочастотной составляющей последовательности выходных сигналов корреляции, соответствующей комбинации сигналов, вызванных механическими перемещениями обследуемого объекта и сигнала, вызванного неподвижными объектами, включая подстилающую поверхность, находящимися в зоне излучения зондирующих импульсов;
определение наличия сигнала, соответствующего движущемуся объекту, включающего сигнал, соответствующий движению грудной клетки обследуемого объекта с учетом возможного перемещения обследуемого объекта при его облучении зондирующими радиоимпульсами;
определение наличия сигнала, соответствующего движению грудной клетки;
компенсацию сигнала отраженного от неподвижных объектов, включая подстилающую поверхность, на которой находится обследуемый объект, расположенных в зоне излучения зондирующих импульсов;
выделение сигнала, соответствующего движению грудной клетки с определением закона движения грудной клетки во времени;
децимацию с усреднением сигнала, соответствующего движению грудной клетки с возможностью обеспечения требуемой точности измерения параметров дыхания и сердцебиения;
выделение из сигнала, соответствующего движению грудной клетки, сигнала, вызванного сердцебиением;
определение частоты сердцебиения;
выделение из сигнала, соответствующего движению грудной клетки, сигнала, вызванного дыханием;
определение частоты дыхания.
2. Способ по п.1, отличающийся тем, что суммарная длительность зондирующего и опорного радиоимпульсов равна длительности СВЧ радиоимпульса.
3. Способ по п.1, отличающийся тем, что выделение сигнала, соответствующего движущемуся объекту, включает:
определение в каждом промежуточном временном интервале из заданного временного интервала min и max амплитуд сигнала;
определение в каждом промежуточном временном интервале разности max и min амплитуд сигнала и сравнение ее с предварительно определяемым порогом;
выделение сигнала, превышающего пороговое значение.
4. Способ по п.3, отличающийся тем, что верхняя граница заданного временного интервала определяется предварительно заданной наиболее низкой частотой дыхания обследуемого объекта.
5. Способ по п.3, отличающийся тем, что промежуточный временной интервал определяется максимальной скоростью перемещения обследуемого объекта.
6. Способ по п.3, отличающийся тем, что величина порога определяется максимальным значением шумов аппаратуры измерения.
7. Способ по п.1, отличающийся тем, что выделение сигнала, соответствующего движению грудной клетки, включает:
определение на границах заданного временного интервала амплитуд сигнала;
определение разности амплитуд в каждом измерении и сравнение ее с предварительно определяемым порогом;
выделение сигнала, не превышающего пороговое значение.
8. Способ по п.7, отличающийся тем, что заданный временной интервал определяется максимально допустимой скоростью перемещения обследуемого объекта.
9. Способ по п.7, отличающийся тем, что величина порога определяется минимально возможной величиной отражения зондирующих радиоимпульсов от обследуемого объекта и максимально возможной частотой дыхания обследуемого объекта.
10. Способ по п.1, отличающийся тем, что определение частоты сердцебиения включает:
определение локальных максимумов сигнала, соответствующего сердцебиению, на временном интервале, границы которого задаются минимальной и максимальной частотой сердцебиения обследуемого объекта;
определение временных интервалов между соседними локальными максимумами сигнала, соответствующего сердцебиению, являющихся периодами мгновенной частоты сердцебиения;
построение гистограммы из значений периодов мгновенной частоты сигнала, соответствующего сердцебиению.
11. Способ по п.1, отличающийся тем, что определение частоты дыхания включает:
определение локальных максимумов сигнала, соответствующего дыханию, на временном интервале, границы которого задаются минимальной и максимальной частотой дыхания обследуемого объекта;
определение временных интервалов между соседними локальными максимумами сигнала, соответствующего дыханию, являющихся периодами мгновенной частоты дыхания;
построение гистограммы из значений периодов мгновенной частоты сигнала, соответствующего дыханию.
| ИМПУЛЬСНЫЙ СВЕРХШИРОКОПОЛОСНЫЙ ДАТЧИК | 2006 |
|
RU2321341C1 |
| US 2005073424 A1, 07.04.2005 | |||
| US 6587072 B1, 01.07.2003 | |||
| US 20070276270 A1, 29.11.2007 | |||
| US 4085740 A, 25.04.1978. | |||

