Изобретение относится к области ближней радиолокации с импульсной модуляцией излучения, внутриимпульсным приемом и обработкой сигналов. Способ обработки сигналов и радиолокационный датчик (РЛД) его реализующий могут использоваться в системах обнаружения целей и измерения их параметров движения в зоне селекции.
Принцип действия классических радиолокаторов дальнего радиуса действия с импульсной модуляцией излучения основан на разделении во времени процессов формирования зондирующих и приема отраженных радиосигналов. Прием отраженных радиосигналов производится на отрезке времени между излучением зондирующих радиоимпульсов. Расстояние до цели определяется по времени запаздывания отраженного радиоимпульса, а скорость движения - по частоте доплеровского сигнала (см. стр. 175-215, [1]).
Недостатком классических радиолокаторов является наличие «мертвой зоны», определяемой суммарным временем формирования зондирующего радиоимпульса и временем восстановления чувствительности приемника [2].
Известны РЛД с импульсной модуляцией излучения [3-10], у которых отсутствует мертвая зона вблизи антенны. В этих РЛД используется метод приема отраженного радиосигнала [11] во время излучения зондирующего радиоимпульса, когда время τ запаздывания отраженного радиосигнала меньше длительности tи зондирующих радиоимпульсов (τ<tи). В этом случае процесс выделения информации об отраженном сигнале производится по разности фаз излучаемого и принимаемого радиосигналов вследствие их взаимной когерентности. Относительное перемещение цели и РЛД вызывает соответствующие изменения разности фаз этих радиосигналов. Данные изменения фазы преобразуются в видеоимпульсы длительностью tи-τ на выходе смесителя приемника. Выделение и «растягивание» по времени этих видеоимпульсов на период их повторения Тп путем временного стробирования схемой выборки-хранения и последующая фильтрация обеспечивают формирование доплеровского сигнала, который востребован для измерения скорости цели и решения задачи ее обнаружения.
Зона селекции РЛД определяется по нормированной амплитуде доплеровского сигнала относительно уровня собственных шумов приемника. Ближняя граница зоны селекции по дальности Rбл этих РЛД равна нулю, а дальняя - ограничена длительностью зондирующего радиоимпульса: Rд=ctи/2, где с - скорость радиоволн в свободном пространстве. С боков зона селекции ограничена шириной диаграммы направленности антенны по «азимуту» и «углу места». Благодаря отмеченным свойствам РЛД с внутриимпульсным приемом и обработкой сигналов обладают повышенной устойчивостью к пассивным помехам, находящимся за пределами зоны селекции цели и поэтому находят широкое применение в системах безопасности на транспорте и охраны объектов, а также системах контроля технологических процессов [12-17].
Необходимо отметить, что РЛД с внутриимпульсным приемом сигналов имеют как гомодинное, так и автодинное построение [18] приемопередатчиков. При гомодинном построении отсутствует отдельный гетеродин в приемнике, что упрощает конструкцию РЛД. Однако применение автодинного приемопередатчика обеспечивает дополнительное упрощение РЛД. В нем отсутствуют смеситель и устройство развязки между передатчиком и приемником, например, циркулятор. Автодинный генератор (автодин) совмещает в себе обе функции одновременно и тем самым имеет самую простую конструкцию, малые габариты и вес, а также низкую стоимость приемопередатчика [19]. Перечисленные достоинства зачастую являются определяющими в пользу применения автодинных РЛД во многих приложениях [3-7; 15; 16].
Известны РЛД, обладающие повышенной устойчивостью к пассивным помехам, находящимся в зоне селекции в непосредственной близости к антенне. Эти помехи возникают, например, от мокрого снега, града и дождя, а также от насекомых и птиц. Для защиты от этих помех в РЛД [15; 16] используется попеременная передача зондирующих радиоимпульсов на двух разных частотах. Получаемые при этом доплеровские сигналы предложено обрабатывать с учетом их разности фаз. При этом сигналы от помех в ближней зоне действия РЛД находятся в фазе и их несложно исключить вычитанием, а сигналы от удаленных целей отличаются между собой по фазе, что используется для определения расстояния до цели.
Принцип подавления помех в ближней зоне РЛД, предложенный в [20-25], основан на поочередной передаче двух зондирующих радиоимпульсов, из которых один является неизменным по ширине, а другой подвергнут псевдослучайной модуляции длительности. Формируемые на выходе смесителя видеоимпульсы далее усиливают и сглаживают фильтром нижних частот, как было описано выше. При этом свойство РЛД подавления радиосигналов от помех, находящихся за пределами дальней границы зоны селекции, сохраняется.
Расширение функциональных возможностей радиоимпульсных РЛД обеспечивает применение в приемопередатчике не обычных (простых), а квадратурных смесителей [8; 26-28]. Этим достигается формирование на выходе приемника двух доплеровских сигналов I(t) и Q(t), сдвинутых по фазе относительно друг друга на угол ±π/2. Смена направления движения цели вызывает изменение знака разности фаз сигналов на противоположный знак. Это явление используется для идентификации объектов локации по направлению движения.
Наиболее близким аналогом (прототипом) по технической сущности, принципу действия и достигаемому положительному эффекту является РЛД, предназначенный для обнаружения движущихся целей в контролируемой зоне селекции, который заявлен согласно патенту US 6492933 B1, опубл. 10.12.2002, МПК7 G01S 13/08, G01S 13/53. SSB pulse Doppler sensor and active reflector system / McEWan [28].
РЛД содержит (см. фиг. 1 описания прототипа) последовательно соединенные опорный тактовый генератор, формирователь модулирующих импульсов, СВЧ-генератор, квадратурный смеситель, антенну, а также подключенный к выходам квадратурного смесителя блок аналоговой обработки сигналов.
Способ формирования и обработки сигналов в РЛД прототипа в соответствие с описанием принципа его действия состоит в следующем. Движущуюся в зоне селекции цель облучают зондирующими радиоимпульсами периодической последовательности, во время излучения зондирующих радиоимпульсов принимают отраженные от движущейся цели радиоимпульсы, разделяют их на два квадратурных канала, смешивают с частью зондирующих радиоимпульсов, преобразуют перекрывающиеся по времени части этих радиоимпульсов в область низких частот в виде квадратурных видеоимпульсов I(t) и Q(t), затем полученные видеоимпульсы усиливают по амплитуде и сглаживают путем фильтрации, при этом получают доплеровские сигналы, по величине амплитуды которых определяют наличие (обнаружение) цели в зоне селекции, по частоте - скорость движения, а по знаку разности фаз - направление ее движения.
Анализ предшествующего уровня техники показал, что известные технические решения РЛД с внутриимпульсным приемом и обработкой сигналов имеют общие существенные недостатки, связанные с особенностями функционирования РЛД и формирования сигналов. Суть этих особенностей состоит в следующем.
РЛД с внутриимпульсным приемом и обработкой сигналов обеспечивает определение дальности до цели по моменту появления доплеровского сигнала при входе цели в зону селекции [29]. При этом возможно измерение текущей дальности до цели и скорости при ее перемещении внутри зоны селекции в радиальном направлении относительно РЛД. Определение текущей дальности до цели внутри зоны селекции находится через отсчет числа n периодов доплеровского сигнала относительно дальней пространственной границы Rд зоны селекции. Текущее расстояние Rц до цели находится по формуле Rц=Rд-nλ/2, где λ - длина волны излучения. При этом имеется в виду цель, которую можно представить как эквивалентный точечный отражатель, т.е. размеры цели значительно меньше размеров зоны селекции.
Однако описанный здесь способ имеет очевидные недостатки. Например, при перемене относительного направления движения цели внутри зоны селекции возникает неопределенность ее положения. Аналогичная ситуация возникает при входе цели в зону селекции сбоку, где границы этой зоны определяются диаграммой направленности антенны. В таких случаях определить расстояние до цели, хотя она находится в зоне селекции, не представляется возможным. Ситуация с определением текущего положения цели становится еще более неопределенной в условиях множества целей в зоне селекции и в случае локации пространственно-распределенных объектов (см. стр. 194-199, [30]).
Таким образом, суть проблемы прототипа состоит в том, что известные способы обработки сигналов не обеспечивают возможность надежного обнаружения и определения параметров движения отдельных объектов локации в условиях наличия в зоне селекции множества целей. Отсутствие разрешающей способности по дальности известных РЛД является их существенным ограничением, особенно в современных условиях возросшей сложности сценариев радиолокационной обстановки.
Решение указанной проблемы достигается тем, что предложен способ обработки радиолокационных сигналов для обнаружения целей и измерения их параметров движения в зоне селекции, состоящий в том, что контролируемую область пространства с находящимися в ней целями периодически облучают зондирующими радиоимпульсами, во время излучения зондирующих радиоимпульсов принимают радиоимпульсы, отраженные от целей, разделяют их на два квадратурных канала, смешивают их с зондирующими радиоимпульсами, преобразуют перекрывающиеся по времени части этих радиоимпульсов в область низких частот в виде двух квадратурных видеоимпульсов I(t) и Q(t), затем полученные в этих каналах преобразованные квадратурные видеоимпульсы дискретизируют по времени и запоминают во множестве моментов времени tkm квадратурные значения  и
и  где k=0, 1, 2, … - порядковый номер зондирующего радиоимпульса; m=0, 1, 2, …М, затем в обоих каналах из текущих отсчетов
где k=0, 1, 2, … - порядковый номер зондирующего радиоимпульса; m=0, 1, 2, …М, затем в обоих каналах из текущих отсчетов  и
и  начиная с m=1, вычитают предыдущие значения отсчетов
начиная с m=1, вычитают предыдущие значения отсчетов  и
и  :
:

а по полученным значениям разностей xkm и ykm вычисляют амплитуду Akm и фазу Фkm, сигнала для каждого отсчета, начиная с m=1, по следующим формулам:

далее для полученных данных отсчетов амплитуд Akm вычисляют значения отношения сигнал-шум qkm=Akm/σш, где σш - среднеквадратическое значение уровня собственных шумов на выходе приемника, из множества значений qkm отношения сигнал-шум выбирают те значения порядковых номеров m, амплитуд Akm и фаз Фkm, при которых уровень сигнал-шум превышает порог: qkm≥qпор, где qпор - пороговое отношение сигнал-шум, рассчитывают расстояния  до элементов разрешения по дальности, в которых обнаружены цели, по формуле:
до элементов разрешения по дальности, в которых обнаружены цели, по формуле:
где n - порядковый номер обнаруженной цели; m - номер отсчета до n-ой цели, для которой обнаружено превышение порогового уровня qпор; tи - длительность радиоимпульса; с - скорость распространения СВЧ излучения; М - число отсчетов за время tи, а в отношении выборок полученных отсчетов значений фазы  сигнала, последовательно при изменении номера k зондирующего радиоимпульса выполняют дифференцирование, при этом получают значения мгновенной частоты
сигнала, последовательно при изменении номера k зондирующего радиоимпульса выполняют дифференцирование, при этом получают значения мгновенной частоты  доплеровского сигнала n-й цели:
доплеровского сигнала n-й цели:

где  и
и  - производные по времени от xkm и ykm в каналах I(t), Q(t) соответственно, значения которых определяют методом конечных разностей, для этого берут соседние значения переменных, например, при k и k±1, по полученным результатам расчета доплеровской частоты
- производные по времени от xkm и ykm в каналах I(t), Q(t) соответственно, значения которых определяют методом конечных разностей, для этого берут соседние значения переменных, например, при k и k±1, по полученным результатам расчета доплеровской частоты  вычисляют относительные скорости движения целей по следующей формуле:
вычисляют относительные скорости движения целей по следующей формуле:
где с - скорость распространения СВЧ излучения; ω0=2πƒ0 - круговая частота СВЧ излучения, результаты вычисления скорости  n-ой цели последовательно при изменении номера зондирующего радиоимпульса k сглаживают, например применением операции «скользящее среднее» или алгоритма фильтрации Калмана, далее численным методом, например, конечных разностей для каждой n-ой цели решают дифференциальное уравнение
n-ой цели последовательно при изменении номера зондирующего радиоимпульса k сглаживают, например применением операции «скользящее среднее» или алгоритма фильтрации Калмана, далее численным методом, например, конечных разностей для каждой n-ой цели решают дифференциальное уравнение  при этом предыдущее решение этого уравнения, начиная с нулевого, берут в качестве постоянной интегрирования последующего решения и, тем самым, получают для каждой n-ой цели закономерность изменения полной фазы Ф(n)(t) во времени, далее определяют искомую функцию закона движения n-ой цели по формуле:
при этом предыдущее решение этого уравнения, начиная с нулевого, берут в качестве постоянной интегрирования последующего решения и, тем самым, получают для каждой n-ой цели закономерность изменения полной фазы Ф(n)(t) во времени, далее определяют искомую функцию закона движения n-ой цели по формуле:
где λ - длина волны СВЧ излучения, результаты вычисления функции закона движения R(n)(t) n-ой цели последовательно при изменении номера зондирующего радиоимпульса k сглаживают, например применением операции «скользящее среднее» или алгоритма фильтрации Калмана.
Предложенный способ обработки радиолокационных сигналов для обнаружения целей и измерения их параметров движения в зоне селекции реализован в РЛД содержащим антенну, доплеровский приемопередающий модуль с квадратурными выходами I(t) и Q(t) преобразованных сигналов, блок синхронизации и формирования импульсов, а также блок обработки сигналов, причем антенна присоединена к высокочастотному порту упомянутого доплеровского приемопередающего модуля, к управляющему входу которого подключен первый выход блока синхронизации и формирования импульсов, в него дополнительно введены первый и второй аналого-цифровые преобразователи, сигнальные входы которых подключены к квадратурным выходам I(t) и Q(t) доплеровского приемопередающего модуля, а выходы - к сигнальным входам блока обработки сигналов, при этом второй выход блока синхронизации и формирования импульсов подключен к тактовому входу блока обработки сигналов, а третий выход подключен к тактовым входам первого и второго аналого-цифровых преобразователей, при этом
блок синхронизации и формирования импульсов содержит опорный тактовый генератор, подключенный к входам умножителя частоты и счетчика-делителя частоты, при этом выход счетчика-делителя частоты является первым выходом блока синхронизации и формирования импульсов, а выход умножителя частоты - вторым его выходом, при этом первый и второй выходы подключены также к входам селектора импульсов, выход которого является третьим выходом блока синхронизации и формирования импульсов;
доплеровский приемопередающий модуль с квадратурными выходами I(t) и Q(t) преобразованных сигналов, выполнен по гомодинной схеме и содержит передатчик, первый и второй смесители, первый и второй делители мощности, циркулятор и фазовращатель с квадратурными выходами высокочастотных сигналов, при этом передатчик подключен своим высокочастотным выходом к входу первого делителя мощности, первый выход которого подключен к первому входу циркулятора, а второй - к входу фазовращателя, при этом к третьему входу циркулятора подключен вход второго делителя мощности, а второй вход циркулятора является высокочастотным портом доплеровского приемопередающего модуля, при этом выходы второго делителя мощности соответственно подключены к сигнальным входам первого и второго смесителей, гетеродинные входы которых подключены к квадратурным выходам фазовращателя, при этом вход управления передатчиком и квадратурные выходы I(t) и Q(t) первого и второго смесителей подключены к одноименным входам и выходам доплеровского приемопередающего модуля;
доплеровский приемопередающий модуль с квадратурными выходами I(t) и Q(t) преобразованных сигналов, выполнен по автодинной схеме и содержит СВЧ генератор, подключенный к первому порту квадратурного смесителя «на проход», выполненного на основе передающей линии с помещенными в нее первым и вторым смесителями, расположенными на фазовом расстоянии, равном нечетному числу одной восьмой длины волны, при этом сигнальные выходы первого и второго смесителей и второй порт квадратурного смесителя «на проход» подключены соответственно к выходам I(t), Q(t) и высокочастотному порту доплеровского приемопередающего модуля.
Техническим результатом предложенного способа и устройства его реализующего является получение у РЛД с внутриимпульсным приемом и обработкой радиосигналов нового свойства - разрешающей способности по дальности, что обеспечило возможность раздельного обнаружения множества объектов локации в зоне селекции и определения параметров их движения, причем эта возможность реализуется при обработке как минимум двух зондирующих радиоимпульсов. При этом сохранились свойства устройства-прототипа - защищенность от воздействия пассивных помех, находящихся за пределами зоны селекции и возможность измерения скорости движения объектов внутри зоны селекции.
В результате поиска альтернативных решений в данной и смежной областях применения РЛД с внутриимпульсным приемом и обработкой сигналов для обнаружения и измерения параметров движения множества объектов среди патентных источников и литературы установлено, что у известных устройств перечисленные выше признаки отсутствуют. Следовательно, предлагаемое техническое решение обладает новизной, поскольку авторам неизвестны устройства аналогичного назначения, содержащие признаки, которые фигурируют в предлагаемом изобретении в качестве отличительных признаков.
Анализ результатов патентного поиска показал, что предлагаемое решение не следует явным образом из уровня техники. Из определенного выше уровня техники не выявлена известность влияния существенных признаков заявляемого технического решения на появление новых свойств объекта и на достижение указанного выше технического результата. Следовательно, заявляемое техническое решение соответствует условию патентоспособности «изобретательский уровень».
Изобретение направлено на расширение функциональных возможностей и улучшение технических характеристик РЛД, используемых, как отмечалось выше, в системах безопасности на транспорте, охраны объектов, контроля параметров технологических процессов и пр. Отсюда следует, что заявляемое изобретение соответствует критерию «промышленная применимость».
Сущность изобретения поясняется чертежами.
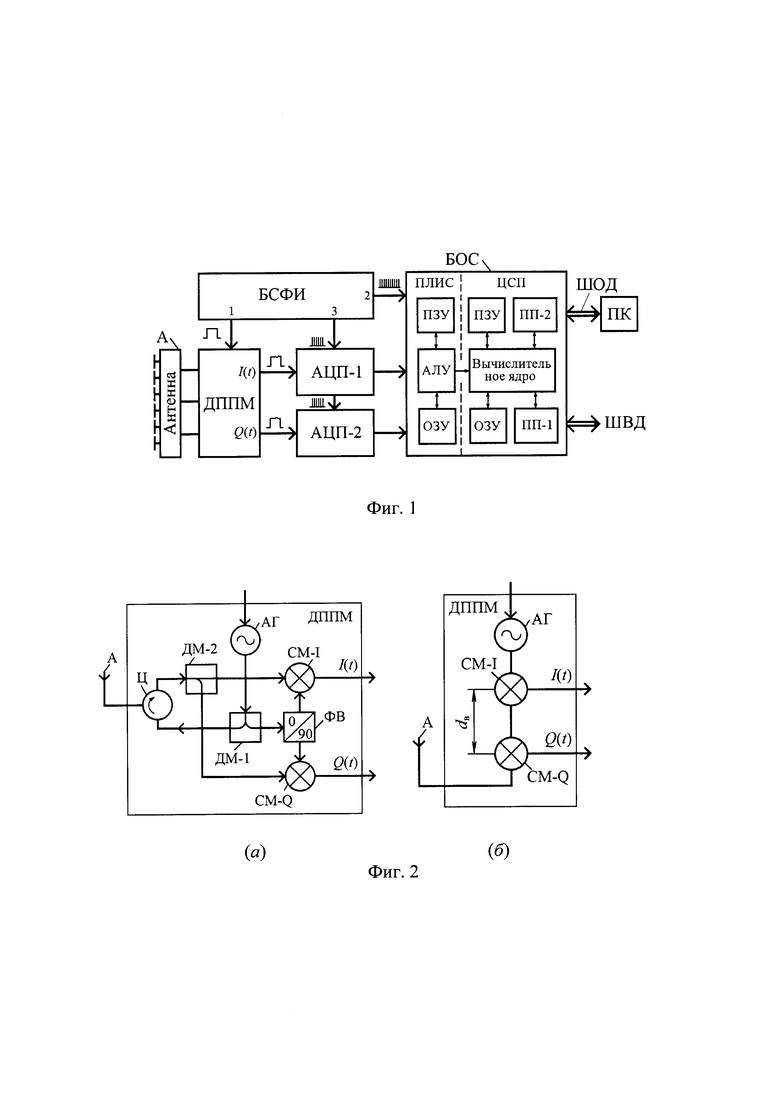
На фиг. 1 представлена структурная схема РЛД, который содержит антенну (А), доплеровский приемопередающий модуль (ДППМ) с квадратурными выходами I(t) и Q(t) преобразованных сигналов, блок синхронизации и формирования импульсов (БСФИ), первый и второй аналого-цифровые преобразователи (АЦП-1 и АЦП-2), блок обработки сигналов (БОС), шину выходных данных (ШВД), шину обмена данными (ШОД) с персональным компьютером (ПК). БОС выполнен на основе программируемой логической интегральной схемы (ПЛИС) и цифрового сигнального процессора (ЦСП), при этом ПЛИС содержит постоянное запоминающее устройство (ПЗУ), арифметико-логическое устройство (АЛУ) и оперативное запоминающее устройство (ОЗУ), а ЦСП содержит постоянное запоминающее устройство (ПЗУ ЦСП), вычислительное ядро ЦСП и оперативное запоминающее устройство (ОЗУ ЦСП), а также первый и второй приемопередатчики шин последовательного порта ПП-1 и ПП-2.
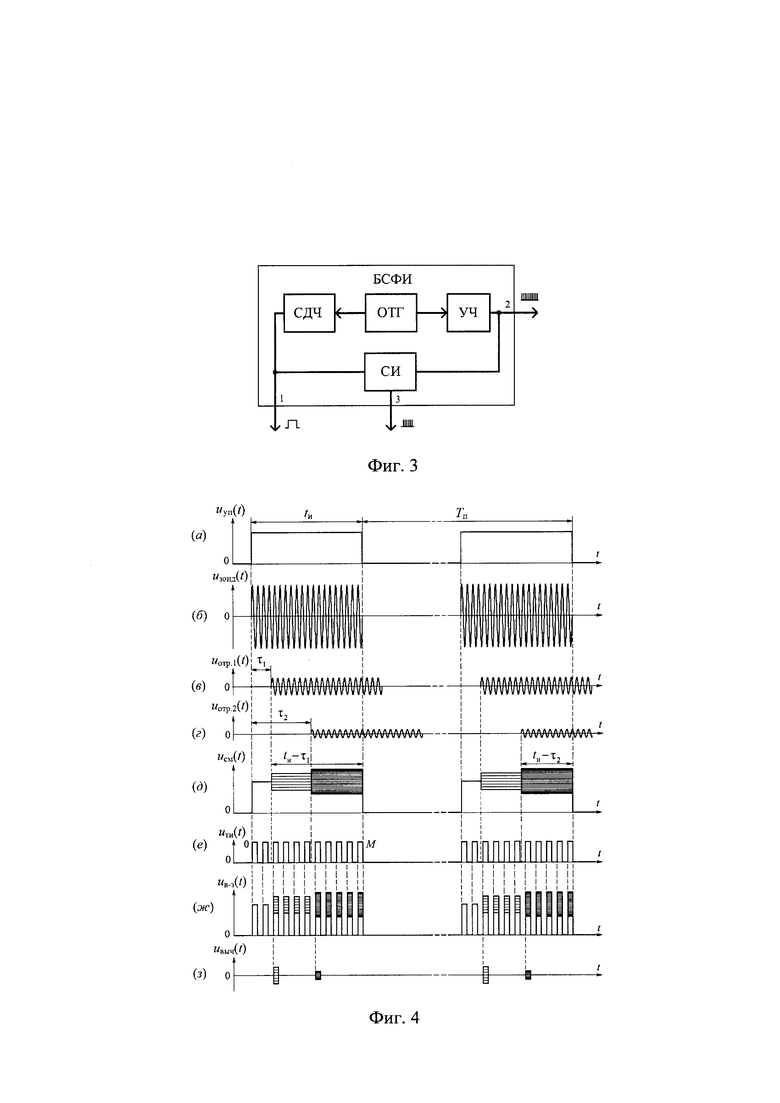
На фиг. 2 приведены гомодинный (а) и автодинный (б) варианты выполнения ДППМ с квадратурными выходами I(t) и Q(t) преобразованных сигналов, где А - антенна; АГ - автогенератор; ДМ-1, ДМ-2 - первый и второй делители мощности; CM-I и CM-Q - смесители квадратурных каналов I(t) и Q(t) соответственно; ФВ - квадратурный фазовращатель; Ц - циркулятор; dв - фазовое расстояние между смесителями.
На фиг. 3 приведен один из вариантов выполнения БСФИ, содержащего опорный тактовый генератор (ОТГ), умножитель частоты (УЧ), счетчик-делитель частоты (СДЧ) и селектор импульсов (СИ).
На фиг. 4 приведены временные диаграммы процессов формирования и обработки сигналов в РЛД для обнаружения целей и измерения их параметров движения в зоне селекции: (а) - выходное напряжение uуп(t) БСФИ управления передатчиком ДППМ; (б) - напряжение зондирующего uзонд(t) радиосигнала; (в) - напряжение uотр.1(t) радиосигнала, полученного (отраженного) от первой цели; (г) - напряжение uотр.2(t) радиосигнала, полученного (отраженного) от второй цели; (д) - выходное напряжение uсм(t) на выходах квадратурного смесителя; (е) - напряжение тактовых импульсов uти(t) на третьем выходе БСФИ; (ж) - напряжение uв-з(t) сигналов после операции выборка-запоминание (хранение); (з) - напряжение uвыч(t) сигналов после операции вычитания из текущих значений отсчетов предыдущих.
РЛД (см. фиг. 1) содержит антенну (А), соединенную с доплеровским приемопередающим модулем (ДППМ) с квадратурными выходами I(t) и Q(t) преобразованных сигналов, блок синхронизации и формирования импульсов (БСФИ), подключенный своим первым выходом к управляющему входу ДППМ, первый и второй аналого-цифровые преобразователи (АЦП-1 и АЦП-2) и блок обработки сигналов (БОС). При этом сигнальные выходы I(t) и Q(t) ДППМ соответственно подключены к сигнальным входам первого АЦП-1 и второго АЦП-2 аналого-цифровых преобразователей, а выходы последних подключены к сигнальным входам блока обработки сигналов (БОС), при этом второй выход БСФИ подключен к тактовому входу БОС, а третий - к тактовым входам АЦП-1 и АЦП-2. Кроме того, БОС имеет шину выходных данных (ШВД) для передачи результатов обработки сигналов конечному потребителю (на фиг. 1 он не показан) и шину обмена данными (ШОД) с персональным компьютером (ПК).
Антенна А может иметь различные варианты исполнения, например, в виде щелевой или полосковой фазированной решетки, рупорной, диэлектрической, линзовой антенны или антенны типа «вытекающей волны» (см. стр. 21, 114, 142, 151, 200 в [31]).
ДППМ с выходами I(t) и Q(t) квадратурных сигналов также имеет альтернативные технические решения. Он может быть выполнен по гомодинной или автодинной схеме (см. описания аналогов: фиг. 4 [8], фиг. 5а, 5b [25]; фиг. 3 [26], фиг. 1а [27], патент [32]; рис. 5 статьи [33], рис. 1 статьи [34]). ДППМ может иметь в своем составе программируемый контроллером синтезатор частоты. Кстати, готовые модули ДППМ выпускаются промышленностью (см., например, описание доплеровского модуля: «24.125 GHz Ranging Sensor Head, Dual Channel, Short Range», Model SSD-24303-20M-DW на сайте https://www.eravant.com/).
При гомодинном исполнении ДППМ содержит отдельные узлы передатчика и приемника, связанные с антенной А через развязывающее устройство, например, циркулятор (см. фиг. 1а [27]), при этом приемник выполненный на основе квадратурного смесителя, обеспечивает на своих выходах формирование двух сигналов I(t) и Q(t), сдвинутых по фазе на 90° (см. выражения (3.6) и (3.7), стр. 106, [35]).
Пример выполнения ДППМ по гомодинной схеме, представленный на фиг. 2,а, содержит автогенератор АГ, подключенный своим высокочастотным выходом к входу первого делителя мощности ДМ-1 первый выход которого подключен к первому входу циркулятора Ц, а второй - к входу фазовращателя ФВ, при этом к третьему входу циркулятора Ц подключен вход второго делителя мощности ДМ-2, а второй вход циркулятора Ц подключен к антенне А. При этом выходы делителя мощности ДМ-2 соответственно подключены к сигнальным входам смесителей CM-I и CM-Q, гетеродинные входы которых подключены к выходам фазовращателя ФВ, при этом вход управления передатчиком и квадратурные выходы I(t) и Q(t) смесителей CM-I и CM-Q подключены к одноименным входам и выходам ДППМ. В состав ДППМ могут входить дополнительные элементы, не изменяющие суть изобретения. Например, перед вторым делителем мощности ДМ-2 может быть установлен малошумящий усилитель, а между первым делителем мощности ДМ-1 и циркулятором Ц - усилитель мощности. На выходах смесителей CM-I и СМ-Q могут использоваться усилители преобразованного сигнала.
При автодинном исполнении ДППМ, как отмечалось выше, функции передатчика и приемника выполняет единственный элемент - автогенератор. Для получения квадратурных сигналов в автодинном ДППМ известен вариант с двумя детекторными диодами в отрезке передающей линии между автогенератором и антенной (см. рис. 9,б, [36]). Другой вариант основан на использовании, так называемого «двухдиодного автодина» (см. рис. 10, [36]), представляющего собой систему из двух взаимно синхронизированных парциальных автогенераторов при сильной связи [37]. При этом регистрация сдвинутых по фазе сигналов I(t) и Q(t) производится в цепи питания этих парциальных автогенераторов (см. рис. 14, 15, 22, статьи [36]). Для уменьшения степени искажений сигналов из-за автодинных изменений частоты автодинные генераторы желательно стабилизировать посредством внешних высокодобротных резонаторов [18].
Пример выполнения ДППМ по автодинной схеме представлен на фиг. 2,б. ДППМ содержит автогенератор АГ, подключенный своим высокочастотным выходом к входу последовательно соединенных первого CM-I и второго CM-Q смесителей «на проход», имеющих фазовое расстояние dв между ними, кратное нечетному числу 1/8 длины волны в передающей линии, причем выход второго смесителя CM-Q предназначен для подключения антенны А, а вход управления передатчиком и квадратурные выходы I(t) и Q(t) смесителей CM-I и CM-Q подключены к одноименным входам и выходам ДППМ. В состав ДППМ, выполненных по автодинной схеме, могут входить дополнительные элементы, не изменяющие суть изобретения. Например, на выходах смесителей CM-I и CM-Q могут использоваться усилители преобразованного сигнала.
БСФИ может быть выполнен на базе «жесткой» логики, ПЛИС или с применением специализированных микросхем и иметь различное функциональное построение. Один из вариантов выполнения БСФИ (см. фиг. 3) содержит опорный тактовый генератор (ОТГ), подключенный к входам умножителя частоты (УЧ) и счетчика-делителя частоты (СДЧ), а также селектор импульсов (СИ), причем выход СДЧ подключен к первому входу СИ и является первым выходом БСФИ, а выход УЧ подключен ко второму входу СИ и является вторым выходом БСФИ, при этом выход СИ является третьим выходом БСФИ. Данная структурная схема БСФИ реализована на микросхеме Si5368, содержащей опорный тактовый генератор и два независимых программируемых умножителей/делителей частоты с низким уровнем джиггера (дрожания) фазы выходных колебаний в диапазоне частот от 2 кГц до 1,4 ГГц (см. сайт фирмы Silicon Laboratories: http://www.silabs.com). При этом в качестве СИ используется логический элемент «И».
В качестве АЦП-1 и АЦП-2 в предлагаемом РЛД предпочтительно использование микросхем быстродействующих АЦП [38; 39]. Например, микросхема AD9689 фирмы «Analog Devices» представляет собой двойной 14-разрядный АЦП с интерфейсом JESD204B, быстродействием 2,6 Гбайт/с (см. сайт: https://www.analog.com/ru/products/ad9689.html#product-overview). Этот АЦП способен осуществлять прямую выборку аналоговых сигналов с шириной полосы пропускания по уровню -3 дБ до 9 ГГц. Аналогичные АЦП типа DAC38RF82 и DAC38RF89 выпускаются фирмой Texas Instruments.
БОС (см. фиг. 1) может быть реализован на основе микросхем быстродействующих ПЛИС и/или цифровых сигнальных процессоров (ЦСП). Современные ПЛИС, например, фирмы Agere Systems, обеспечивают скорость передач до 10 Гбит/с; фирмы Cypress Semiconductor - до 12 Гбит/с; биполярные ПЛИС серии SH100K фирмы Infinion работают на тактовой частоте до 5 ГГц (см. стр. 132-133 [38]), а ПЛИС семейства UltraScale имеют быстродействие до 32,75 Гбит/с (см. стр. 149-189 [39]). Быстродействие ЦСП несколько ниже, чем у устройств на ПЛИС. Однако новые технические решения, основанные на радиофотонной технологии, позволяют расширить частотный диапазон ЦСП до 5 ГГц [40]. Из результатов выполненного анализа технического состояния средств цифровой обработки сигналов следует, что на сегодня предпочтительным вариантом выполнения БОС 9 является использование преимущества ПЛИС по быстродействию при первичной обработке сигналов и достоинств ЦСП по возможностям выполнения сложных операций с сигналами при их окончательной обработке.
БОС (см. фиг. 1) выполнен на основе ПЛИС и ЦСП. При этом ПЛИС содержит: постоянное запоминающее устройство (ПЗУ), хранящее программу первичной обработки сигналов; арифметико-логическое устройство (АЛУ), выполняющее арифметические операции (сложения, вычитания, умножения и т.д.); оперативное запоминающее устройство (ОЗУ), хранящее текущие данные при выполнении операций. ЦСП содержит: постоянное запоминающее устройство (ПЗУ), хранящее программу обработки сигналов ЦСП; высокоскоростное вычислительное ядро, выполняющее функции цифровой обработки сигнала (спектральный анализ, цифровую фильтрацию сигнала и формирование данных, индикации); оперативное запоминающее устройство (ОЗУ), выполняющее функции запоминания текущих значений и результатов отработки сигналов ЦСП; приемопередатчики ПП-1 и ПП-2 шин последовательного порта для передачи и обмена информацией по ШВД и ШОД.
РЛД, выполненный в соответствие с предложенным способом для обнаружения и измерения параметров движения объектов локации в зоне селекции работает следующим образом.
После подачи напряжения питания на РЛД в БОС (см. фиг. 1) в соответствие с алгоритмом его работы вычислительное ядро ЦСП включает команду «Инициализация» [41], по которой производится настройка периферийных устройств ЦСП, распределение внутренней памяти, установка значений внутренних переменных, копирование исполняемого кода из низкопроизводительного ПЗУ в высокопроизводительное ОЗУ ЦСП и подача команды в АЛУ «Выборка из АЦП и сохранение результатов в памяти», по которой ПЛИС переходит в режим готовности приема оцифрованных сигналов от АЦП-1 и АЦП-2 с последующим формированием массива данных в памяти ОЗУ ПЛИС.
В БСФИ (см. фиг. 3) после подачи напряжения питания происходит запуск опорного тактового генератора ОТГ. Выходной сигнал этого генератора поступает на умножитель частоты УМ, на выходе которого формируются тактовые импульсы с периодом повторения Tти, а также на счетчиковый делитель частоты СДЧ, на выходе которого формируются импульсы длительностью tи с периодом повторения Тп для управления передатчиком ДППМ (см. фиг 4,а). Эти импульсы, поступающие также на первый вход селектора импульсов СИ (см. фиг. 3), на его выходе из последовательность импульсов с выхода УЧ формируют пачки импульсов от 0 до М (см. диаграмму (е) для случая М=10 на фиг 4), заполняющих временной интервал tи, которые подаются далее на тактовые входы АЦП-1 и АЦП-2. При этом количество тактовых импульсов за время tи определяет разрешающую способность РЛД по дальности: Δr=tиc/2M, где М - число отсчетов за время tи.
Импульсы запуска передатчика ДППМ с первого выхода БСФИ uим(t), (см. фиг 4,а) подаются на вход управления ДППМ, обеспечивая в нем условия возбуждения СВЧ-колебаний. Формируемые передатчиком ДППМ зондирующие радиоимпульсы uзонд(t) (см. фиг 4,б), пройдя через первый делитель мощности ДМ-1 и циркулятор Ц, излучаются через антенну А в контролируемое пространство. Выражение для зондирующего сигнала uзонд(t) с прямоугольной огибающей Uзонд(k,t) имеет вид [11]:

где
A0 - амплитуда зондирующего сигнала;
 - единичная функция зондирующего сигнала;
- единичная функция зондирующего сигнала;
ω0=2πƒ0 - круговая частота излучения;
tи и Тп=2π/Ωп - длительность и период повторения импульсов;
ϕk - случайная начальная фаза k-го радиоимпульса;
k - целое число, порядковый номер зондирующего радиоимпульса.
Часть мощности сигнала передатчика со второго выхода первого делителя мощности ДМ-1, пройдя через квадратурный фазовращатель ФВ, делится поровну и поступает на смесители CM-I и CM-Q в качестве гетеродинных сигналов с относительным сдвигом фаз на π/2. Эти сигналы назовем «прямыми» (индекс «прм»), в общем виде они записываются как


где
Aпрм - амплитуда прямых сигналов;
 - единичная функция прямого сигнала.
- единичная функция прямого сигнала.
В случае наличия в поле излучения антенны A N точечных объектов локации отраженные от них радиосигналы принимаются антенной А, проходят через циркулятор Ц, делятся поровну вторым делителем мощности ДМ-2 и поступают на сигнальные входы первого и второго смесителей CM-I и CM-Q соответственно (см. фиг. 2,а). Выражение для этих радиосигналов запишем в виде:

где
A0 - амплитуда зондирующего радиосигнала;
 - безразмерный коэффициент ослабления амплитуды излучаемого сигнала по пути распространения до цели и обратно, приведенный к входу-выходу антенны А;
- безразмерный коэффициент ослабления амплитуды излучаемого сигнала по пути распространения до цели и обратно, приведенный к входу-выходу антенны А;
τn=2Rn/с; - время запаздывания отраженного излучения от n-ой цели;
Rn - текущее расстояние до n-ой цели;
с - скорость распространения радиоволн;
ϕk - случайная начальная фаза k-го радиоимпульса;
k - целое число;
ϕn - постоянный фазовый сдвиг, связанный с отражающими свойствами n-ой цели;
Рзонд - средняя мощность зондирующего радиосигнала;
Pmin - минимальный обнаруживаемый (пороговый) сигнал;
GA - коэффициент усиления антенны А;
λ=с/ƒ0 - длина волны излучения;
σn - эффективная площадь рассеяний n-ой цели;
с - скорость распространения электромагнитного излучения;
 - единичная функция отраженного сигнала.
- единичная функция отраженного сигнала.
На фиг. 4,в и г представлены временные диаграммы сигналов для случая наличия в поле излучения антенны А двух точечных объектов локации (N=2), находящихся соответственно на расстояниях R1 и R2, когда времена запаздывания составляют τ1=2R1/с и τ2=2R2/с.
В результате нелинейного взаимодействия прямых и отраженных колебаний в смесителях CM-I и CM-Q происходит преобразование сигналов в область низких частот. При этом на выходах I(t) и Q(t) смесителей преобразованные сигналы uпр(t) формируются в виде видеоимпульсов. Выражения, полученные для k-го зондирующего радиоимпульса, имеют вид:


где
Ас=kпрА0Апрм/2 - сомножитель амплитуды выходных сигналов смесителей CM-I и CM-Q;
 - единичная функция преобразованного сигнала на выходах смесителей CM-I и CM-Q;
- единичная функция преобразованного сигнала на выходах смесителей CM-I и CM-Q;
Rn(t) - функция движения n-ой цели в зоне селекции РЛД;
 - синфазная и ортогональная составляющие собственных шумов смесителей и шумов СВЧ генератора, преобразованных на выходы смесителей CM-I и CM-Q;
- синфазная и ортогональная составляющие собственных шумов смесителей и шумов СВЧ генератора, преобразованных на выходы смесителей CM-I и CM-Q;
Aим=kдA0Aпрм/2 - амплитуда импульса, полученного на выходах смесителей CM-I и CM-Q в результате детектирования прямого сигнала;
kпр и kд - соответственно коэффициенты преобразования и амплитудного детектирования смесителей CM-I и CM-Q по напряжению (при этом полагаем, что эти смесители имеют идентичные параметры);
λ=2πс/ω0 - длина волны СВЧ излучения.
Отметим, что начальная фаза ϕk в (5), (6) отсутствует, так как при условии τ<tи прямое и отраженное излучения в пределах k-го радиоимпульса являются когерентными и фаза ϕk в преобразованном сигнале вычитается.
Первые слагаемые в (5) и (6), представляющие результат преобразования отраженного сигнала в смесителях CM-I и CM-Q, содержат информацию о дальности до объектов локации и скорости их движения. При этом для реально существующих скоростей движения объектов локации справедливо условие, что за время tи действия зондирующего радиоимпульса расстояние между антенной А и объектами локации практически не изменится. Тогда согласно (5) и (6) полученные видеоимпульсы на выходах I(t) и Q(t) квадратурного смесителя остаются в течение действия этих радиоимпульсов практически постоянными. Поэтому выглядят они в форме ступенчатых функций времени, при этом «высота» ступенек пропорциональна уровню отраженного сигнала, а знак (вверх или вниз) их зависит от текущей разности фаз излученного передатчиком ДППМ и отраженного от объекта локации колебаний (см. осциллограммы на рис. 17 статьи [18], временные диаграммы этих сигналов для случая двух точечных целей без учета шумов на фиг. 4,д настоящего описания). При относительном перемещении объекта локации мгновенные изменения высоты ступенек происходят с доплеровской частотой [18]. Таким образом, сигналы, полученные от объектов локации, которые находятся на меньших расстояниях, чем последующий объект локации, вызывают изменения высоты видеоимпульсов I(t) и Q(t) на выходе квадратурного смесителя от момента времени прихода отраженного излучения τ1 до окончания радиоимпульса tи. При этом формирование изменений, обусловленных действием отраженного излучения от следующего объекта локации, происходят с момента времени τ2 также до окончания радиоимпульса tи. Отсюда следует, что в рассматриваемом устройстве происходит аддитивное сложение радиоимпульсов сигналов.
Вторые слагаемые  и
и  в (5) и (6) отображают результат преобразования собственных шумов смесителей CM-I и CM-Q и шумов СВЧ генератора. Присутствие этих шумов выражается в шумовой модуляции высоты видеоимпульсов I(t) и Q(t) на выходах смесителей CM-I и CM-Q. При этом необходимо отметить, что шумовые составляющие
в (5) и (6) отображают результат преобразования собственных шумов смесителей CM-I и CM-Q и шумов СВЧ генератора. Присутствие этих шумов выражается в шумовой модуляции высоты видеоимпульсов I(t) и Q(t) на выходах смесителей CM-I и CM-Q. При этом необходимо отметить, что шумовые составляющие  и
и  на выходах смесителей CM-I и CM-Q представляют собой независимые стационарные нормальные процессы с нулевым средним значением. Взаимная корреляция этих составляющих отсутствует.
на выходах смесителей CM-I и CM-Q представляют собой независимые стационарные нормальные процессы с нулевым средним значением. Взаимная корреляция этих составляющих отсутствует.
Третьи слагаемые в (5) и (6) обусловлены детектированием прямого сигнала СВЧ генератора, воздействующего на входы смесителей CM-I и СМ-Q. Поэтому формируемые на выходах смесителей CM-I и CM-Q видеоимпульсы, полученные в результате приема отраженных радиосигналов, располагаются на некотором «паразитном» пьедестале.
При реализации РЛД с автодинным ДППМ (см. фиг. 2, б) с приходом импульсы запуска передатчика происходит возбуждение СВЧ колебаний в автогенераторе АГ. Формируемые в АГ зондирующие радиоимпульсы uзонд(t) (см. фиг 4,б), пройдя через проходные смесители CM-I и CM-Q, разнесенные в передающей линии на нечетное число 1/8 длины волны, излучаются через антенну А в контролируемое пространство. Выражение для зондирующего сигнала uзонд(t) с прямоугольной огибающей Uзонд(k,t) в общем виде записано в (1).
В случае наличия в поле излучения антенны А N точечных объектов локации отраженные от них радиосигналы принимаются антенной А и направляются передающей линией через проходные смесители CM-Q и CM-I в автогенератор АГ (см. фиг. 2,б). В этой линии прямой (зондирующий) и отраженный радиосигналы вызывают интерференцию волн. Фазовые соотношения этих волн таковы, что в смесителях CM-I и CM-Q происходит преобразование сигналов в область низких частот и на их выходах наблюдается формирование квадратурных сигналов I(t) и Q(t) соответственно [33]. Выражения, описывающие процесс формирования этих сигналов, имеют вид (5) и (6).
С выходов смесителей CM-I и CM-Q (см. фиг. 1) видеоимпульсы далее поступают соответственно на сигнальные входы АЦП-1 и АЦП-2, где выполняется сначала операция дискретизации сигналов (5) и (6) по времени. Во время действия тактовых импульсов uти(t) (см. диаграмму (е) на фиг. 4) в АЦП-1 и АЦП-2 происходит выборка и запоминание мгновенных значений сигналов (5) и (6) в виде импульсов, амплитуда которых равна мгновенным значениям этих сигналов (см. диаграмму (ж) на фиг. 4). Уровни этих импульсов далее в АЦП-1 и АЦП-2 преобразуются в цифровые значения, которые в виде параллельного кода поступают в ОЗУ ПЛИС в качестве массива данных, полученных для принятого сигнала от k-го зондирующего радиоимпульса:


где

 - цифровые отсчеты мгновенных значений принятого сигнала от k-го зондирующего радиоимпульса, полученные для m-го тактового импульса (здесь m=0, 1, 2, …М).
- цифровые отсчеты мгновенных значений принятого сигнала от k-го зондирующего радиоимпульса, полученные для m-го тактового импульса (здесь m=0, 1, 2, …М).
Последовательности оцифрованных для каждого k-го видеоимпульса мгновенных значений  и
и  соответственно, полученных в моменты времени t=mTти, поступают далее в АЛУ ПЛИС, где в соответствие с программой, заложенной в ПЗУ ПЛИС, выполняется операция вычитания, при которой из текущих значений отсчетов, начиная с m=1, вычитаются значения предыдущих отсчетов:
соответственно, полученных в моменты времени t=mTти, поступают далее в АЛУ ПЛИС, где в соответствие с программой, заложенной в ПЗУ ПЛИС, выполняется операция вычитания, при которой из текущих значений отсчетов, начиная с m=1, вычитаются значения предыдущих отсчетов:


Полученный в результате вычитания (9) и (10) массив данных xkm и ykm поступают в ОЗУ ПЛИС:


где
xkm, ykm - цифровые отсчеты мгновенных значений разностей из (9) и (10) для k-го зондирующего радиоимпульса, полученные для m-го тактового импульса (здесь m=1, 2, …М).
В результате выполнения операции вычитания в полученных значениях xkm, и ykm происходит отделение полезного сигнала от паразитного пьедестала, обусловленного детектированием прямого сигнала СВЧ генератора смесителями CM-I и CM-Q, а также разделение аддитивного наложения сигналов предыдущих элементов (m-1) разрешения целей на последующие элементы (m). На диаграмме (з) фиг. 4 на примере наличия в зоне селекции двух целей показано формирование разностных сигналов, которые находятся в различных ячейках ОЗУ ПЛИС. При этом шумовые составляющие  и
и  на выходах смесителей CM-I и CM-Q в результате дискретизации и оцифровки мгновенных значений отсчетов вследствие эргодичности процессов в среднем по реализациям k и отсчетам m сохраняют свое среднеквадратическое значение уровня шума σш. Значение уровня шума σш может быть рассчитано или измерено экспериментально и учтено в программе работы БОС.
на выходах смесителей CM-I и CM-Q в результате дискретизации и оцифровки мгновенных значений отсчетов вследствие эргодичности процессов в среднем по реализациям k и отсчетам m сохраняют свое среднеквадратическое значение уровня шума σш. Значение уровня шума σш может быть рассчитано или измерено экспериментально и учтено в программе работы БОС.
После этого в АЛУ ПЛИС вычисляются и заносятся в память ОЗУ ЦСП значения относительной амплитуды Akm и фазы Фkm сигнала, рассчитанные по формулам:

Далее с полученными значениями амплитуды Akm для каждого отсчета k-го зондирующего радиоимпульса в АЛУ ПЛИС выполняется их нормировка относительно среднеквадратического значения уровня шума σш: qkm=Akm/σш, что эквивалентно определению отношение сигнал-шум в каждом элементе разрешения по дальности. Согласно программе, заложенной в ПЗУ ЦСП, вычислительным ядром ЦСП выполняется перебор и анализ значений qkm. В ходе этих операций по величине превышения выбранного заранее порогового значения отношения сигнал-шум qпор определяется наличие (обнаружение) целей в зоне селекции РЛД. Полученный в результате анализа значений сигнал-шум qkm массив данных  и
и  обнаруженных целей поступает в ОЗУ ПЛИС:
обнаруженных целей поступает в ОЗУ ПЛИС:


где
 - цифровые отсчеты значений относительной амплитуды и фазы из (13) для k-го зондирующего радиоимпульса и m-го тактового импульса (здесь m=1, 2, …М), полученные для n-ой обнаруженной цели в зоне селекции (здесь n=1, 2, …N - порядковый номер цели, считая от РЛД, причем N≤M).
- цифровые отсчеты значений относительной амплитуды и фазы из (13) для k-го зондирующего радиоимпульса и m-го тактового импульса (здесь m=1, 2, …М), полученные для n-ой обнаруженной цели в зоне селекции (здесь n=1, 2, …N - порядковый номер цели, считая от РЛД, причем N≤M).
Для полученных значений m, при которых обнаружены объекты локации, вычислительным ядром ЦСП БОС выполняется расчет текущего расстояния  до n-ой цели в зоне селекции по формуле:
до n-ой цели в зоне селекции по формуле:

где m - порядковый номер отсчета, соответствующий n-ой цели в зоне селекции; tи - длительность радиоимпульса; с - скорость распространения СВЧ излучения; М - число отсчетов за время tи.
Результаты вычислений  согласно (16) для каждой реализации k через шинный приемопередатчик ПП-1 ЦСП передаются по шине ШВД конечному потребителю:
согласно (16) для каждой реализации k через шинный приемопередатчик ПП-1 ЦСП передаются по шине ШВД конечному потребителю:

В блоке отработки сигналов (БОС) вычислительным ядром ЦСП к совокупности хранящихся в ОЗУ ЦСП значений амплитуд  и фаз
и фаз  сигналов n-й цели последовательно применяются операции «сшивания» и «сглаживания». Первая операция обеспечивает непрерывность вращения вектора
сигналов n-й цели последовательно применяются операции «сшивания» и «сглаживания». Первая операция обеспечивает непрерывность вращения вектора  (без скачков) на комплексной плоскости при изменении k в процессе перемещения целей (здесь j - мнимая единица) [42]. Для этого сначала разрешается неопределенность значений фаз
(без скачков) на комплексной плоскости при изменении k в процессе перемещения целей (здесь j - мнимая единица) [42]. Для этого сначала разрешается неопределенность значений фаз  полученных вычислением арктангенса в (13), ограниченного диапазоном однозначного определения фазовых углов ±π/2. Цель этой операции достигается учетом в значениях
полученных вычислением арктангенса в (13), ограниченного диапазоном однозначного определения фазовых углов ±π/2. Цель этой операции достигается учетом в значениях  перехода фазы из одной полуплоскости в другую на краях границ однозначности. Для этого, продифференцировав полную фазу
перехода фазы из одной полуплоскости в другую на краях границ однозначности. Для этого, продифференцировав полную фазу  получим выражение для мгновенной частоты
получим выражение для мгновенной частоты  доплеровского сигнала n-й цели:
доплеровского сигнала n-й цели:

где  и
и  - производные по времени от хkm и ykm в каналах I(t), Q(t), соответственно, значения которых определяются методом конечных разностей, беря соседние значения переменных, например, при k и k±1.
- производные по времени от хkm и ykm в каналах I(t), Q(t), соответственно, значения которых определяются методом конечных разностей, беря соседние значения переменных, например, при k и k±1.
По полученным согласно (18) результатам расчета доплеровской частоты  вычислительным ядром ЦСП выполняется вычисление относительной скорости движения n-ой цели по следующей формуле:
вычислительным ядром ЦСП выполняется вычисление относительной скорости движения n-ой цели по следующей формуле:

где с - скорость распространения электромагнитного излучения;
ω0=2πƒ0 - круговая частота излучения.
К результатам вычисления скорости  n-ой цели согласно (19) вычислительным ядром ЦСП последовательно при изменении k применяется операция «сглаживания», которая выступает в качестве фильтра нижних частот «зашумленных» данных. Эта операция выполняется вычислительным ядром ЦСП БОС, например, применением операции «скользящее среднее» или алгоритма фильтрации Калмана [43]. «Сглаженные» данные текущей скорости
n-ой цели согласно (19) вычислительным ядром ЦСП последовательно при изменении k применяется операция «сглаживания», которая выступает в качестве фильтра нижних частот «зашумленных» данных. Эта операция выполняется вычислительным ядром ЦСП БОС, например, применением операции «скользящее среднее» или алгоритма фильтрации Калмана [43]. «Сглаженные» данные текущей скорости  нового массива через шинный приемопередатчик ПП-1 ЦСП передаются по шине ШВД конечному потребителю.
нового массива через шинный приемопередатчик ПП-1 ЦСП передаются по шине ШВД конечному потребителю.
Зависимость полной фазы  от времени определяется вычислительным ядром ЦСП через решение дифференциального уравнения
от времени определяется вычислительным ядром ЦСП через решение дифференциального уравнения  численными методами, например, как отмечалось выше, методом конечных разностей, беря соседние значения переменных при k и k±1. При этом предыдущее решение дифференциального уравнения для каждой n-ой цели является постоянной интегрирования последующего решения. Последовательное решение этого уравнения приводит к «сшиванию» отдельных фаз
численными методами, например, как отмечалось выше, методом конечных разностей, беря соседние значения переменных при k и k±1. При этом предыдущее решение дифференциального уравнения для каждой n-ой цели является постоянной интегрирования последующего решения. Последовательное решение этого уравнения приводит к «сшиванию» отдельных фаз  и получению закономерности изменения полной фазы Ф(n)(t) во времени, что позволяет определить искомую функцию, которая описывает закон движения n-ой цели:
и получению закономерности изменения полной фазы Ф(n)(t) во времени, что позволяет определить искомую функцию, которая описывает закон движения n-ой цели:

Результаты вычисления функции закона движения R(n)(t) n-ой цели для снижения влияния шумов и дискретизации в процессе реализации последовательности зондирующих радиоимпульсов вычислительным ядром ЦСП БОС сглаживаются, например применением операции «скользящее среднее» или алгоритма фильтрации Калмана.
Текущие данные  о перемещении n-ой цели после сглаживания через шинный приемопередатчик ПП-1 ЦСП с заданным темпом передаются по шине ШВД конечному потребителю. Последующий анализ полученной функции
о перемещении n-ой цели после сглаживания через шинный приемопередатчик ПП-1 ЦСП с заданным темпом передаются по шине ШВД конечному потребителю. Последующий анализ полученной функции  позволяет определить величину перемещения цели, амплитуду, частоту и характер вибраций поверхности объекта локации, а также его иные параметры и характеристики.
позволяет определить величину перемещения цели, амплитуду, частоту и характер вибраций поверхности объекта локации, а также его иные параметры и характеристики.
Предлагаемый способ был реализован в виде действующего макета РЛД 8-мм диапазона, выполненного по автодинной схеме на основе СВЧ генератора на диоде Ганна и квадратурного смесителя на диодах с барьером Шоттки. При длительности зондирующих радиоимпульсов tи=100 нс дальность до границы зоны селекции составила 15 м. Число отсчетов за время излучения радиоимпульса М=100 (частота тактовых импульсов Fтакт=1,0 ГГц). При этом разрешающая способность РЛД по дальности составила Δr=0,15 м. Частота повторения радиоимпульсов выбрана Fповт=1 МГц. Потенциал РЛД в полосе доплеровских частот 0,05…20 кГц получен равным в диапазоне 95…100 дБ. Моделирующие испытания, проведенные на открытой площадке с уголковыми отражателями, подтвердили возможность обнаружения и определения параметров движения нескольких целей, находящихся в зоне селекции. Результаты лабораторных исследований образца РЛД подтвердили возможность восстановления сложного закона перемещения цели согласно предложенному способу обработки радиолокационных сигналов.
Таким образом, предложенные способ обработки радиолокационных сигналов и устройство его реализующее при сохранении функциональных возможностей прототипа (защищенность от воздействия пассивных помех и возможность измерения скорости движения цели в зоне селекции) обеспечивает возможность обнаружения множества целей, определение расстояния до них и скорости движения, а также параметров вибраций и сложных законов перемещения объекта локации.
Литература
1. Справочник по радиолокации / Под ред. М.И. Сколника. В 2 книгах. Книга 1. Москва: Техносфера, 2014.
2. Коган И.М. Ближняя радиолокация. - М.; Сов. радио, 1973.
3. Патент США US 3849778, опубл. 19.11.1974, МПК1 F42C 13/04. Pulse Doppler fuse / Redcay.
4. Патент США US 4065768, опубл. 27.12.1977, МПК2 G01S 9/44. Radar apparatus / Kondoh et al.
5. Патент США US 4194203, опубл. 18.03.1980, МПК3 F42C 13/04. Pulse Doppler-radio proximity fuze / Kuck et al.
6. Патент США US 4313118, опубл. 26.06.1982, МПК4 G01S 13/04. Microwave proximity sensor / Calvin.
7. Патент США US 4310842, опубл. 12.01.1982, МПК4 G01S 13/04. Pulsed Doppler radar system / Siebeneck et al.
8. Патент США US 4131889, опубл. 26.12.1978, МПК3 G01S 13/04. Miniature Doppler radar systems and microwave receivers suitable therefore / Gray.
9. Заявка Японии JP 61-18142, опубл. 10.05.1986 №6-454, МКИ4 G01S 13/50. Доплеровский радиолокатор с разделением дальности на диапазоны.
10. Патент Великобритании GB 2215157 A, опубл. 13.09.1989, МКИ4 G01S 13/18. Radar apparatus / Cashen.
11. Носков В.Я., Богатырев Е.В., Игнатков К.А.. Принцип построения бортового радиолокационного датчика для обнаружения быстро движущихся целей. Успехи современной радиоэлектроники. 2019. №12. С. 16-22.
12. Патент США US 4197537 A, опубл. 08.04.1980, МПК3 G01S 9/42. Intruder detection system / Follen et al.
13. Патент США US 4295131 A, опубл. 13.10.1981, МПК3 G01S 13/56. Low consumption pulses Doppler effect intrusion sensor / Bonori et al.
14. Патент США US 4322722, опубл. 30.03.1982, МПК4 G01S 13/56. Pulsed microwave motion sensor for intrusion detection applications / Kozdon.
15. Патент США US 4697184, опубл. 29.09.1987, МПК5 G01S 13/56. Intrusion detection radar system with amplitude and frequency carrier modulation to eliminate targets at short and long ranges / Cheal et al.
16. Патент США US 6677887 B2, опубл. 13.01.2004, МПК7 G01S 13/62. Intrusion detection radar system / Harman.
17. Носков В.Я. Автодинный измеритель параметров движения отцепов на сортировочной горке. Применение радиоволн миллиметрового и субмиллиметрового диапазонов. Сборник научных трудов. - Харьков: ИРЭ АН Украины, 1992. - С. 66-74.
18. Носков В.Я., Смольский С.М. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 6. Исследования радиоимпульсных автодинов. Успехи современной радиоэлектроники. 2009. №6. С. 3-51.
19. Патент США US 6577270 B2, опубл. 10.01.2003, МПК7 G01S 13/34. Radar transceiver / Kanechika et al.
20. Патент США US 5521600, опубл. 28.05.1996, МПК6 G01S 13/94. Range-gated field disturbance sensor with range-sensitivity compensation / McEWan.
21. Патент США US 5682164, опубл. 28.10.1997, МПК6 G01S 13/56. Pulse homodyne field disturbance sensor / McEWan.
22. Патент США US 5966090 A, опубл. 12.10.1999, МПК6 G01S 13/56. Differential pulse radar motion sensor / McEWan.
23. Патент США US 5986600, опубл. 16.11.1999, МПК6 G01S 13/56. Pulsed RF oscillator and radar motion sensor / McEWan.
24. Патент США US 6414627, опубл. 02.07.2002, МПК7 G01S 13/00. Homodyne swept-range radar / McEWan.
25. Патент США US 6426716 B1, опубл. 30.07.2002, МПК7 G01S 13/04, G01S 13/56. Modulated pulse Doppler sensor / McEWan.
26. Патент США US 4286260, опубл. 25.08.1981, МПК3 G08B 13/18. Ranging quadrature Doppler microwave intrusion alarm system / Gershberg et al.
27. Патент США US 4499467, опубл. 12.02.1985, МПК4 G01S 13/62. Doppler radar sets with target direction sensing capability / Rittenbach.
28. Патент США US 6492933 B1, опубл. 10.12.2002, МПК7 G01S 13/08, G01S 13/53. SSB pulse Doppler sensor and active reflector system / McEWan.
29. Закарлюк H.M., Носков В.Я. Принцип действия и основные возможности автодинного радиоимпульсного дальномера. Сборник трудов III ВНТК «Радиовысотометрия-2010». - Екатеринбург: Форт Диалог-Исеть, 2010. - С. 134-138.
30. Финкельштейн М.И. Основы радиолокации. М.: Радио и связь, 1983.
31. Воскресенский Д.И. Антенны и устройства СВЧ. Расчет и проектирование антенных решеток и их излучающих элементов. М.: Советское радио, 1972.
32. Патент США US 5761616 A, опубл. 02.06.1998, МПК7 Н04В 1/26. Frequency mixer for a Doppler radar module / Lohninger.
33. Носков В.Я., Смольский С.М., Игнатков К.А., Чупахин А.П. Сигналы автодинных модулей с внешним детектированием. Уральский радиотехнический журнал. 2018. Т. 2. №4. С. 20-40.
34. Носков В.Я., Игнатков К.А., Чупахин А.П. Двухдиодный автодин в системах радиоволнового контроля динамических процессов. Датчики и системы. 2016. №6 (204). С. 31-37.
35. Сколник М. Введение в технику радиолокационных систем. М.: Мир, 1965.
36. Носков В.Я., Смольский С.М., Игнатков К.А. и др. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 11. Основы реализации автодинов. Успехи современной радиоэлектроники. 2019. №2. С. 5-33.
37. Носков В.Я., Игнатков К.А., Чупахин А.П. Автодинный эффект системы двух взаимно синхронизированных генераторов при сильной связи. Радиотехника и электроника. 2018. Т. 63, №2. С. 200-208.
38. Грушвицкнй Р.И., Мурсаев А.Х., Угрюмое Е.П. Проектирование систем на микросхемах программируемой логики. - СПб.: БХВ-Петербург, 2002.
39. Гузик В.Ф., Каляев И.А., Левин И.И. Реконфигурируемые вычислительные системы. Ростов-на-Дону: Издательство Южного федерального университета, 2016.
40. Konatham S.R., et al. Ultra-High-Speed Time-Frequency Signal Processing. Optics & Photonics News. 2018, December, p. 37.
41. «Руководство пользователя: Семейство микроконтроллеров MSP430X1XX». Пер. с англ. М.: ЗАО «Компэл», 2004.
42. Cam Nguyen, Seoktae Kim. Theory, Analysis and Design of RF Interferometric Sensors. Springer New York Dordrecht Heidelberg London. 2012.
43. Frank Schadt, Friedemann Mohr, Markus Holzer. Application of Kalman Filters as a Tool for Phase and Frequency Demodulation of IQ Signals. International Conference on «Computational Technologies in Electrical and Electronics Engineering» (IEEE REGION 8 SIBIRCON). Novosibirsk Scientific Centre, Novosibirsk, Russia. July 21-25, 2008. P. 421-424.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| СПОСОБ ФИКСАЦИИ МОМЕНТА ОТДЕЛЕНИЯ ОТЦЕПА ОТ СОСТАВА И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ (ВАРИАНТЫ) | 2023 |
|
RU2815559C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ ЛОКАЦИИ В РАДИОЛОКАЦИОННЫХ ДАТЧИКАХ С ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ РАДИОВОЛН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2695799C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2022 |
|
RU2793338C1 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2803413C1 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ КОНТРОЛЯ ДВУХ ЗОН СЕЛЕКЦИИ ЦЕЛИ ПО ДАЛЬНОСТИ | 2023 |
|
RU2822284C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ СТРЕЛОЧНОГО ПЕРЕВОДА СОРТИРОВОЧНОЙ ГОРКИ И ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2022 |
|
RU2792315C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2838248C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ЦЕЛЕЙ С ФАЗОВОЙ СЕЛЕКЦИЕЙ ПО ДАЛЬНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2360265C1 |
Изобретение относится к области ближней радиолокации с импульсной модуляцией излучения, внутриимпульсным приемом и обработкой сигналов. Способ обработки сигналов и радиолокационный датчик (РЛД) могут использоваться в системах обнаружения целей и измерения их параметров движения в зоне селекции. Техническим результатом является получение у РЛД с внутриимпульсным приемом и обработкой радиосигналов разрешающей способности по дальности и обеспечение возможности раздельного обнаружения множества объектов локации в зоне селекции, определения расстояния до них и скорости перемещения, а также параметров вибрации и закона перемещения объекта локации при обработке каждого зондирующего радиоимпульса. Радиолокационный датчик для обнаружения целей и измерения их параметров движения в зоне селекции, реализующий заявленный способ, содержит антенну, доплеровский приемо-передающий модуль с квадратурными выходами I(t) и Q(t) преобразованных сигналов, блок обработки сигналов и блок синхронизации и формирования импульсов, причем в него дополнительно введены первый и второй аналого-цифровые преобразователи, сигнальные входы которых подключены к квадратурным выходам I(t) и Q(t) доплеровского приемо-передающего модуля, а выходы - к сигнальным входам блока обработки сигналов. 2 н. и 5 з.п. ф-лы, 4 ил.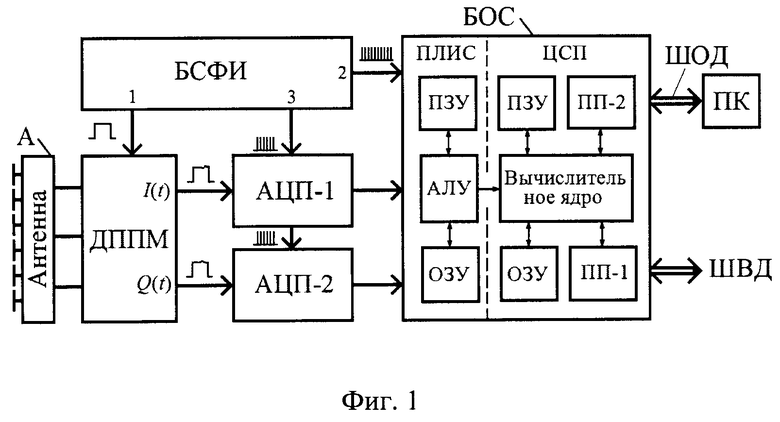
1. Способ обработки радиолокационных сигналов для обнаружения целей и измерения их параметров движения в зоне селекции, состоящий в том, что контролируемую область пространства с находящимися в ней целями периодически облучают зондирующими радиоимпульсами, во время излучения зондирующих радиоимпульсов принимают радиоимпульсы, отраженные от целей, разделяют их на два квадратурных канала, смешивают их с зондирующими радиоимпульсами, преобразуют перекрывающиеся по времени части этих радиоимпульсов в область низких частот в виде двух квадратурных видеоимпульсов I(t) и Q(t), отличающийся тем, что полученные в этих каналах преобразованные квадратурные видеоимпульсы дискретизируют по времени и запоминают во множестве моментов времени tkm квадратурные значения  и
и  где k=0, 1, 2, … - порядковый номер зондирующего радиоимпульса; m=0, 1, 2, …М, затем в обоих каналах из текущих отсчетов
где k=0, 1, 2, … - порядковый номер зондирующего радиоимпульса; m=0, 1, 2, …М, затем в обоих каналах из текущих отсчетов  и
и  начиная с m=1, вычитают предыдущие значения отсчетов
начиная с m=1, вычитают предыдущие значения отсчетов  и
и  :
:

а по полученным значениям разностей xkm и ykm вычисляют амплитуду Akm и фазу Фkm сигнала для каждого отсчета, начиная с m=1, по следующим формулам:

далее для полученных данных отсчетов амплитуд Akm вычисляют значения отношения сигнал-шум qkm=Akm/σш, где σш - среднеквадратическое значение уровня собственных шумов на выходе приемника, из множества значений qkm отношения сигнал-шум выбирают те значения порядковых номеров m, амплитуд Akm и фаз Фkm, при которых уровень сигнал-шум превышает порог: qkm≥qпор, где qпор - пороговое отношение сигнал-шум, рассчитывают расстояния  до элементов разрешения по дальности, в которых обнаружены цели, по формуле:
до элементов разрешения по дальности, в которых обнаружены цели, по формуле:
где n - порядковый номер обнаруженной цели; m - номер отсчета до n-й цели, для которой обнаружено превышение порогового уровня qпор; tи - длительность радиоимпульса; с - скорость распространения СВЧ излучения; М - число отсчетов за время tи, а в отношении выборок полученных отсчетов значений фазы  сигнала, последовательно при изменении номера k зондирующего радиоимпульса выполняют дифференцирование, при этом получают значения мгновенной частоты
сигнала, последовательно при изменении номера k зондирующего радиоимпульса выполняют дифференцирование, при этом получают значения мгновенной частоты  доплеровского сигнала n-й цели:
доплеровского сигнала n-й цели:

где  и
и  - производные по времени от xkm и ykm в каналах I(t), Q(t) соответственно, значения которых определяют методом конечных разностей, для этого берут соседние значения переменных, например, при k и k±1, по полученным результатам расчета доплеровской частоты
- производные по времени от xkm и ykm в каналах I(t), Q(t) соответственно, значения которых определяют методом конечных разностей, для этого берут соседние значения переменных, например, при k и k±1, по полученным результатам расчета доплеровской частоты  вычисляют относительные скорости движения целей по следующей формуле:
вычисляют относительные скорости движения целей по следующей формуле:
где с - скорость распространения СВЧ излучения; ω0=2πƒ0 - круговая частота СВЧ излучения, результаты вычисления скорости  n-й цели последовательно при изменении номера зондирующего радиоимпульса k сглаживают, далее численным методом, например, конечных разностей для каждой n-й цели решают дифференциальное уравнение
n-й цели последовательно при изменении номера зондирующего радиоимпульса k сглаживают, далее численным методом, например, конечных разностей для каждой n-й цели решают дифференциальное уравнение  при этом предыдущее решение этого уравнения, начиная с нулевого, берут в качестве постоянной интегрирования последующего решения и тем самым получают для каждой n-й цели закономерность изменения полной фазы Ф(n)(t) во времени, далее определяют искомую функцию закона движения n-й цели по формуле:
при этом предыдущее решение этого уравнения, начиная с нулевого, берут в качестве постоянной интегрирования последующего решения и тем самым получают для каждой n-й цели закономерность изменения полной фазы Ф(n)(t) во времени, далее определяют искомую функцию закона движения n-й цели по формуле:
где λ - длина волны СВЧ излучения, результаты вычисления функции закона движения R(n)(t) n-й цели последовательно при изменении номера зондирующего радиоимпульса k сглаживают.
2. Способ по п. 1, отличающийся тем, что результаты вычисления скорости  и функции закона движения R(n)(t) n-й цели последовательно при изменении номера зондирующего радиоимпульса k сглаживают применением операции «скользящее среднее».
и функции закона движения R(n)(t) n-й цели последовательно при изменении номера зондирующего радиоимпульса k сглаживают применением операции «скользящее среднее».
3. Способ по п. 1, отличающийся тем, что результаты вычисления скорости  и функции закона движения R(n)(t) n-й цели последовательно при изменении номера зондирующего радиоимпульса k сглаживают применением алгоритма фильтрации Калмана.
и функции закона движения R(n)(t) n-й цели последовательно при изменении номера зондирующего радиоимпульса k сглаживают применением алгоритма фильтрации Калмана.
4. Радиолокационный датчик для обнаружения целей и измерения их параметров движения в зоне селекции, реализующий способ согласно пп. 1, 2 и 3, содержит антенну, доплеровский приемо-передающий модуль с квадратурными выходами I(t) и Q(t) преобразованных сигналов, блок обработки сигналов и блок синхронизации и формирования импульсов, причем антенна присоединена к высокочастотному порту упомянутого доплеровского приемо-передающего модуля, к управляющему входу которого подключен первый выход блока синхронизации и формирования импульсов, отличающийся тем, что в него дополнительно введены первый и второй аналого-цифровые преобразователи, сигнальные входы которых подключены к квадратурным выходам I(t) и Q(t) доплеровского приемо-передающего модуля, а выходы - к сигнальным входам блока обработки сигналов, при этом второй выход блока синхронизации и формирования импульсов подключен к тактовому входу блока обработки сигналов, а третий выход подключен к тактовым входам первого и второго аналого-цифровых преобразователей.
5. Радиолокационный датчик для обнаружения целей и измерения их параметров движения в зоне селекции согласно п. 4, отличающийся тем, что блок синхронизации и формирования импульсов содержит опорный тактовый генератор, подключенный к входам умножителя частоты и счетчика-делителя частоты, при этом выход счетчика-делителя частоты является первым выходом блока синхронизации и формирования импульсов, а выход умножителя частоты - вторым его выходом, при этом первый и второй выходы подключены также к входам селектора импульсов, выход которого является третьим выходом блока синхронизации и формирования импульсов.
6. Радиолокационный датчик для обнаружения целей и измерения их параметров движения в зоне селекции согласно п. 4, отличающийся тем, что доплеровский приемо-передающий модуль с квадратурными выходами I(t) и Q(t) преобразованных сигналов, выполнен по гомодинной схеме и содержит передатчик, первый и второй смесители, первый и второй делители мощности, циркулятор и фазовращатель с квадратурными выходами высокочастотных сигналов, при этом передатчик подключен своим высокочастотным выходом к входу первого делителя мощности, первый выход которого подключен к первому входу циркулятора, а второй - к входу фазовращателя, при этом к третьему входу циркулятора подключен вход второго делителя мощности, а второй вход циркулятора является высокочастотным портом доплеровского приемо-передающего модуля, при этом выходы второго делителя мощности соответственно подключены к сигнальным входам первого и второго смесителей, гетеродинные входы которых подключены к квадратурным выходам фазовращателя, при этом вход управления передатчиком и квадратурные выходы I(t) и Q(t) первого и второго смесителей подключены к одноименным входам и выходам доплеровского приемо-передающего модуля.
7. Радиолокационный датчик для обнаружения целей и измерения их параметров движения в зоне селекции согласно п. 4, отличающийся тем, что доплеровский приемо-передающий модуль с квадратурными выходами I(t) и Q(t) преобразованных сигналов, выполнен по автодинной схеме и содержит СВЧ генератор, подключенный к первому порту квадратурного смесителя «на проход», выполненного на основе передающей линии с помещенными в нее первым и вторым смесителями, расположенными на фазовом расстоянии, равном нечетному числу одной восьмой длины волны, при этом сигнальные выходы первого и второго смесителей и второй порт квадратурного смесителя «на проход» подключены соответственно к выходам I(t), Q(t) и высокочастотному порту доплеровского приемо-передающего модуля.
8. Радиолокационный датчик для обнаружения целей и измерения их параметров движения в зоне селекции согласно пп. 4 и 6, отличающийся тем, что СВЧ генератор выполнен со стабилизацией частоты при помощи программируемого синтезатора частоты.
9. Радиолокационный датчик для обнаружения целей и измерения их параметров движения в зоне селекции согласно пп. 4 и 7, отличающийся тем, что СВЧ генератор выполнен со стабилизацией частоты внешним высокодобротным резонатором.
| US 6492933 B1, 10.12.2002 | |||
| US 4499467 A, 12.02.1985 | |||
| КОГЕРЕНТНЫЙ ПРИЕМНИК РЛС С ЦИФРОВЫМ УСТРОЙСТВОМ ДЛЯ АМПЛИТУДНОЙ И ФАЗОВОЙ КОРРЕКТИРОВКИ КВАДРАТУРНЫХ СОСТАВЛЯЮЩИХ ПРИНИМАЕМОГО СИГНАЛА | 2004 |
|
RU2273860C2 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В РЕЖИМЕ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2419107C1 |
| US 4286260 A, 25.081981 | |||
| НОСКОВ В.Я., СМОЛЬСКИЙ С.М | |||
| Гибридно-интегральные автодины миллиметрового диапазона с амплитудной модуляцией // III Всероссийская конференция "Радиолокация и радиосвязь" - ИРЭ РАН, 26-30.10.2009 г., сс.792-810 | |||
| RU | |||

