Изобретение относится к физиологии движений, электрофизиологии, экспериментальной медицине и может быть использовано для изучения роли ствола головного и спинного мозга в сохранении и регуляции равновесия, моделирования методов восстановления постурального контроля при его нарушении.
Травма спинного и головного мозга часто приводит к частичному или полному параличу. Количество таких пациентов во всем мире ежегодно увеличивается. Потеря парализованными больными способности поддерживать собственный вес тела относится к одной из самых сложных проблем реабилитологии. Без необходимого постурального тонуса конечностей и сохранения равновесия больные не способны как к стоянию, так и к ходьбе. Несмотря на актуальность, проблема остается нерешенной, что связано с неизученностью спинальных и стволовых механизмов регуляции постуральной функции, возможностей ее восстановления с помощью внешних воздействий.
За ближайший аналог принят способ исследования постурального контроля, предложенный в статье «Postural performance in decerebrated rabbit» [1], посвященной анализу стволовых механизмов регуляции позы на модели децеребрированного кролика. Способности к сохранению равновесия тестировались на наклоняемой платформе, вызывающей постуральные ответы в мышцах конечностей при стоянии. Для оценки постуральных реакций регистрировали электромиографическую активность и отклонения тела кролика в медио-латеральном направлениии. Подход использован для анализа стволовых механизмов регуляции позы, обнаружена специфическая роль двигательных центров ствола мозга в постуральном контроле. Работа показала, что кролик - удобная модель для изучения равновесия при стоянии. Но для исследования равновесия при активной локомоции модель не подходит из-за специфики локомоторной активности (безудержный галоп или прыжки), при которой проблематично осуществлять постуральные тесты и регистрировать данные. При частичной фиксации туловища галоп, как правило, приводил к нарушению функционального состояния животного, изменению положения имплантированных стимулирующих и отводящих электродов, и, в конечном итоге, к их повреждению. Способности кролика к сохранению равновесия усиливали электрической стимуляцией двигательных центров среднего и продолговатого мозга. Этот метод интересен для исследования значения моторных ядер головного мозга, но не может быть использован для усиления постурального тонуса в условиях изолированного спинного мозга и, как следствие, не применим в анализе внутриспинальных механизмов контроля позы и непосредственно для поиска методов активации постуральных способностей у спинальных больных.
Задача - способ исследования стволовых и спинальных механизмов сохранения равновесия как при стоянии, так и при ходьбе, пригодный для тренировки постуральной функции при ее смоделированном нарушении.
Сущность предложенного способа исследования поддержания равновесия у децеребрированных животных, включающего размещение объекта исследования на наклоняемой опоре, снабженной датчиками давления на нее, электростимуляцию мозга, регистрацию отведенной нейрональной активности и параметров отклонений опоры от горизонтали, характеризуется тем, что подвешивают переднюю часть тела животного, а заднюю часть оставляют свободно опирающейся задними конечностями на двухленточный тредбан, выполненный наклоняемым; закрепляют стимулирующий электрод на твердой мозговой оболочке пояснично-крестцового утолщения спинного мозга (L5 сегмент), закрепляют на задней части позвоночника датчик отклонения тела во фронтальной и сагиттальной плоскостях, стимулируют током с частотой 1-5 Гц, амплитудой 50-300 мкА, длительностью стимула 0.2-0.5 мс; одновременно при ходьбе фиксируют параметры поддержания равновесия: измеряют давление конечностей (при ходьбе) на ленты тредбана, отклонения тела во фронтальной и сагиттальной плоскостях, отклонения тредбана от горизонтали, кинематику движения, записывают электромиограммы мышц конечностей.
Предложенный способ включает закрепление на электромеханическом стенде для постуральных исследований мезэнцефалической кошки, децеребрированной на преколликулярном-постмамиллярном уровне. Это классическая экспериментальная модель с удаленным передним мозгом, но сохраненным стволом головного мозга, мозжечком и спинным мозгом. Она характеризуется смоделированным исходно пониженным мышечным тонусом и отсутствием способностей к спонтанной локомоции. Переднюю треть тела кошки подвешивают, задние две трети - оставляют свободными, но так, что задние конечности опираются на двухленточный тредбан (Фиг.1). При необходимости постуральные рефлексы регистрируют при полностью зафиксированном закрепленном позвоночнике. Например, для записи активности нейронов спинного мозга во время постуральных тестов, когда место отведения нейрональной активности должно быть неподвижно. Электрическая стимуляция твердой мозговой оболочки пояснично-крестцового утолщения спинного мозга (L5 сегмент, 1-5 Hz, 50-300 мкА, 0.2-0.5 мс) используется для усиления мышечного тонуса задних конечностей и вызова бипедальной локомоции с самостоятельной поддержкой веса тела. В качестве постурального теста применяются наклоны тредбана (в движущемся или неподвижном режиме) во фронтальной плоскости, вызывающие отклонения объекта исследования из равновесного состояния. Могут быть использованы различные варианты наклона тредбана, например синусообразный с частотой 0.5-1 Hz, амплитудой ±20°; и трапециевидный с перемещением платформы из позиции -20° в позицию +20° относительно горизонтальной плоскости в течение 1 с, задержкой платформы в наклоненном состоянии в течение 2-3 с. Первая важна для вызова быстрых (динамических) постуральных реакций, вторая - как динамических, так и статических. Под лентами расположены сенсорные платформы, измеряющие степень давления, с которыми конечности воздействуют на опорную поверхность при ходьбе или стоянии. Датчик отклонения тела во фронтальной (медио-латерально) и сагиттальной плоскостях (вверх-вниз) фиксируют на туловище объекта исследования для отведения характеристик постуральных коррекций при ходьбе, стоянии, постуральных тестах. Синхронно с опорными реакциями и отклонением тела регистрируют кинематику движений боковыми (левой, правой) и задней видеокамерами, электромиограммы мышц задних конечностей.
Особенность заявляемого способа изучения и тренировки равновесия состоит в том, что постуральные ответы отводят и анализируют не только во время стояния, но и при активном передвижении. Другим принципиальным отличием является запись силовых опорных реакций, являющихся важным интегральным показателем, характеризующим итоговый результат работы всех мышц конечности при выполнении движения. Метод довольно информативен при относительной простоте использования и не требует предварительной подготовки объекта исследования, осуществления каких-либо инвазивных процедур. Мезэнцефалическая кошка исходно имеет дефицит постурального тонуса также как и нарушение локомоторной функции, поэтому может быть использована как модель патологического состояния с заданными двигательными расстройствами (тяжелая травма головного мозга, массивное нарушение мозгового кровообращения и др.). Как модель для исследования методов активации постуральных способностей после повреждения спинного мозга может быть выбрано спинализированное животное. В этом случае предлагаемый способ дает возможность изучать внутриспинальные механизмы регуляции позы как в острый период после повреждения спинного мозга, так и в ходе регулярных процедур, направленных на тренировку постуральных коррекций в хроническом эксперименте. Важно отметить, что эпидуральная стимуляция спинного мозга, предложенная для усиления мышечного тонуса и вызова локомоции с поддержкой веса тела, может быть использована как способ активации постуральных способностей после полного перерыва спинного мозга, так как электростимулирующее воздействие прикладывают ниже уровня повреждения. Сопоставление получаемых параметров, характеризующих модель (кинетика, кинематика движений, электромиограммы, отклонение тела), позволяет достаточно полно анализировать и исследовать двигательную активность при выполнении постуральных задач и дает возможность качественно и количественно сравнивать механизмы сохранения равновесия в статических условиях и при активном передвижении в пространстве, разрабатывать подходы к восстановлению нарушенной постуральной функции при стоянии и ходьбе.
Пример. Исследования проведены на четырех кошках (2-2.5 кг). После децеребрации позвоночник животного фиксировали, передние конечности подвешивали, задние конечности располагали на двухленточном наклоняемом тредбане, где измеряли силовые опорные реакции. Производили частичную ламинэктомию поясничного отдела позвоночника, вживление миографических электродов, постановку кинематических светоотражающих маркеров на суставы задних конечностей. На открытую часть спинного мозга с дорсальной стороны в области L5 сегмента подшивали поверхностный эпидуральный электрод. Регулировали параметры стимуляции (1-5 Hz, 50-300 мкА, 0.2-0.5 мс), оптимальные для увеличения постурального тонуса и вызова локомоторной активности задних конечностей. Сначала постуральные рефлексы при ходьбе, стоянии, наклонах опорной поверхности тестировали при зафиксированном позвоночнике. Затем задние две трети тела освобождали, задние конечности свободно располагали на тредбане, датчик отклонения туловища животного закрепляли в области поясницы, и постуральные реакции исследовали при стоянии и ходьбе с самостоятельной поддержкой веса тела, при выполнении тестов с наклонами опоры.
На Фиг.1 изображена экспериментальная установка, где 1 - эпидуральный электрод, 2 - датчик отклонения животного, 3 - двигатель, 4 - рычаг наклона тредбана, 5 - датчик силы с сенсорной платформой, 6 - сигнал силы, регистрируемый справа, 7 - сигнал силы, регистрируемый слева, 8 - угол наклона платформы, 9 - сигнал отклонения кошки вверх-вниз, 10 - сигнал отклонения кошки латерально, 11 - кабель, проводящий все сигналы в аналого-цифровой преобразователь.
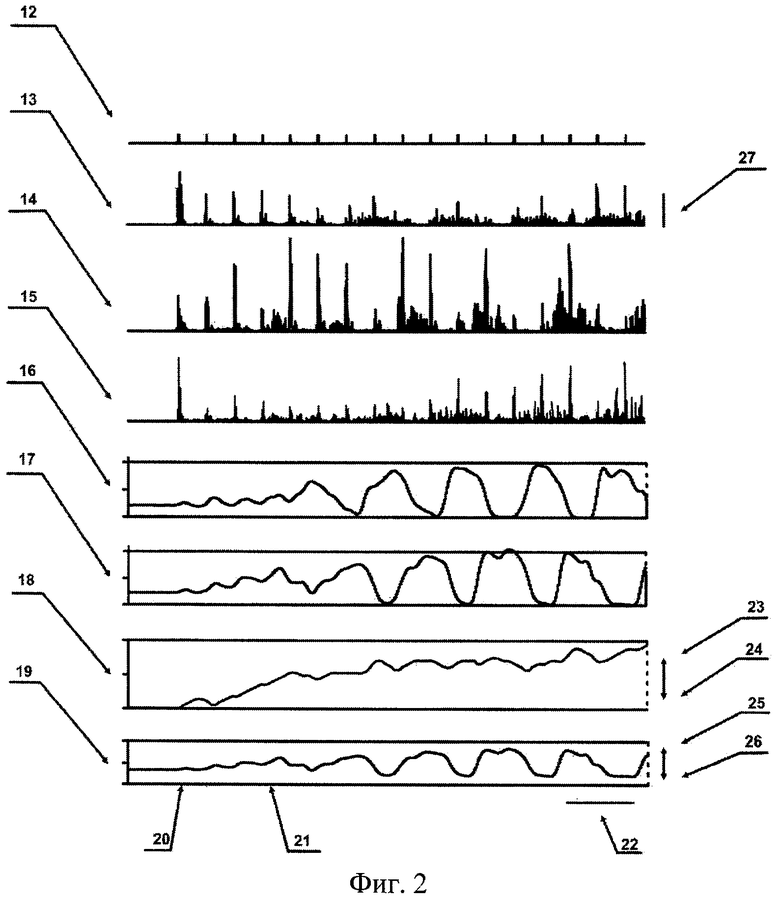
На Фиг.2 показан эффект вставания кошки (исходно животное пассивно сидело на опоре) при воздействии эпидуральной стимуляции (5 Hz, 200 мкА, 0.5 мс) и последующая ходьба с самостоятельной поддержкой веса тела, где 12 - отметка стимуляции, 13 - электромиограмма m.vastus lateralis right, 14 - электромиограмма m.vastus lateralis left, 15 - электромиограмма m.tibialis anterior left, 16 - кривая силовых ответов под правой лапой (шкала от 0 до 1.2 кг), 17 - кривая силовых ответов под левой лапой (шкала от 0 до 1.2 кг кг), 18 - кривая отклонения животного вверх-вниз (шкала от 0 до 8 см), 19 - кривая отклонения животного латерально (шкала от 0.8 см влево до 0.8 см вправо), 20 - момент включения стимуляции, 21 - момент включения тредбана, 22 - отметка времени, соответствующая 0.5 с, 23 - отклонение вверх, 24 - отклонение вниз, 25 - отклонение вправо, 26 - отклонение влево, 27 - отметка амплитуды миограмм, соответствующая 0.1 мВ. На электромиограммах видно, как после включения стимуляции появляется тоническая активность, переходящая во вспышки активности, которые следуют в локомоторном ритме с реципокностью в экстензорах (m.vastus lateralis left) и флексорах (m.tibialis anterior left), между одноименными мышцами с левой и правой стороны (m.vastus lateralis right, m.vastus lateralis left). Характер изменения силовых опорных реакций повторяет описанную динамику. Кривая отклонения вверх-вниз 18 показывает подъем тела вверх при вставании животного и затем, при появлении локомоции, ритмичные отклонения вверх на максимумах активности экстензоров слева-справа. Кривая отклонения 19 в медио-латеральном направлении демонстрирует колебание туловища в сторону при ходьбе. Отклонение проявляется в момент активности экстензора с противоположной стороны и затем компенсируется работой экстензора ипсилатерально.
На Фиг.3 показана активация постуральных реакций кошки с зафиксированным позвоночником, где 28 - электромиограмма m.vastus lateralis right, 29 - электромиограмма m.vastus lateralis left, 30 - кривая силовых ответов под правой лапой (шкала от 0 до 1 кг), 31 - кривая силовых ответов под левой лапой (шкала от 0 до 1 кг), 32 - кривая отклонения опоры латерально (шкала от 20° влево до 20° вправо), 33 - отметка времени, соответствующая 2 с, 34 - отклонение вправо, 35 - отклонение влево, 36 - отметка амплитуды миограмм, соответствующая 0.1 мВ, 37 - отметка времени, соответствующая 1 с, 38 - до стимуляции, 39 - после стимуляции. Видно значительное усиление амплитуды электромиографических, а также силовых ответов стоящей кошки при наклонах опоры после эпидуральной стимуляции (Фиг.3, А). Постуральные реакции кошки при ходьбе на наклоняющейся опоре во время эпидуральной стимуляции проявлялись компенсаторным изменением локомоторного паттерна (Фиг.3, Б). Контралатерально стороне наклона опоры, локомоторные вспышки активности в экстензорах и силовые ответы увеличивались по длительности и по амплитуде.
Таким образом, предложенный способ позволяет активировать постуральные способности организма и изучать нейрофизиологические механизмы поддержания равновесия. Назначение - в физиологии движений для исследования регуляции позы на стволовом и спинальном уровне, разработки подходов тренировки постуральной функции у парализованных больных.
ЛИТЕРАТУРА
1. Musienko Р.Е., Zelenin P.V., Lyalka V.F., Orlovsky G.N., Deliagina T.G. Postural performance in decerebrated rabbit // Behav Brain Res. 2008 Jun 26; 190 (1): 124-34, прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ ХРОНИЧЕСКОГО ПОРАЖЕНИЯ СПИННОГО МОЗГА И ОБУЧЕНИЕ ЕГО ЛЕЧЕНИЮ НА МЕЛКИХ ЛАБОРАТОРНЫХ ЖИВОТНЫХ | 2009 |
|
RU2411589C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ЛЕЧЕНИЯ БОЛЬНЫХ С ХРОНИЧЕСКИМ ПОРАЖЕНИЕМ СПИННОГО МОЗГА НА ЛАБОРАТОРНЫХ ЖИВОТНЫХ | 2011 |
|
RU2466756C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ И ОБУЧЕНИЯ ЛЕЧЕНИЮ БОЛЬНЫХ С ХРОНИЧЕСКИМ ПОРАЖЕНИЕМ СПИННОГО МОЗГА | 2008 |
|
RU2418319C2 |
| СПОСОБ ПОЛУЧЕНИЯ НЕЙТРОНАЛЬНЫХ ИМПЛАНТОВ | 2021 |
|
RU2758972C1 |
| Способ моделирования лечения больных с двигательными и висцеральными расстройствами на лабораторных животных. | 2020 |
|
RU2749634C1 |
| СПОСОБ ТЕСТИРОВАНИЯ ДЕЦЕРЕБРИРОВАННЫХ ЖИВОТНЫХ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2827459C2 |
| СПОСОБ ЭЛЕКТРИЧЕСКОЙ СТИМУЛЯЦИИ СПИННОГО МОЗГА | 2011 |
|
RU2471518C2 |
| СПОСОБ ФОРМИРОВАНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ И ХОДЬБЫ У ПАЦИЕНТОВ С ПАРА- ИЛИ ТЕТРАПАРЕЗОМ | 2014 |
|
RU2572550C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ МЛАДЕНЦА | 2005 |
|
RU2309720C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У ИНВАЛИДОВ С ПОРАЖЕНИЕМ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 2006 |
|
RU2305534C1 |


Изобретение относится к медицине, а именно к электрофизиологии и экспериментальной медицине, и может быть использовано для изучения нейрофизиологических механизмов регуляции позы, моделирования методов восстановления постурального контроля при его нарушении. Размещают децеребрированное животное на наклоняемой опоре, снабженной датчиками давления на нее. Подвешивают переднюю часть тела животного, а заднюю - оставляют свободной так, чтобы задние конечности опирались на двухленточный тредбан, выполненный наклоняемым. Закрепляют стимулирующий электрод на твердой мозговой оболочке пояснично-крестцового утолщения спинного мозга (L5 сегмент). Закрепляют на задней части позвоночника датчик отклонений тела во фронтальной и сагиттальной плоскостях. Стимулируют током с частотой 1-5 Гц, амплитудой 50-300 мкА, длительностью стимула 0,2-0,5 мс. Одновременно при ходьбе фиксируют параметры поддержания равновесия. Способ позволяет анализировать постуральные ответы при активном передвижении экспериментального животного, дает возможность записи силовых опорных реакций, являющихся важным интегральным показателем, характеризующим итоговый результат работы всех мышц конечности при выполнении движения. 3 ил.
Способ исследования поддержания равновесия у децеребрированных лабораторных животных, включающий размещение на наклоняемой опоре, снабженной датчиками давления на нее, электростимуляцию мозга, регистрацию отведенной нейрональной активности и параметров отклонений опоры от горизонтали, отличающийся тем, что
подвешивают переднюю часть тела животного, а заднюю оставляют свободной так, чтобы задние конечности опирались на двухленточный тредбан, выполненный наклоняемым,
закрепляют стимулирующий электрод на твердой мозговой оболочке пояснично-крестцового утолщения спинного мозга (L5 сегмент),
закрепляют на задней части позвоночника датчик отклонений тела во фронтальной и сагиттальной плоскостях,
стимулируют током с частотой 1-5 Гц, амплитудой 50-300 мкА, длительностью стимула 0,2-0,5 мс,
одновременно при ходьбе фиксируют параметры поддержания равновесия: измеряют давление конечностей на ленты тредбана, отклонения тела во фронтальной и сагиттальной плоскостях, отклонения тредбана от горизонтали, кинематику движения, записывают электромиограммы мышц конечностей.
| MUSIENKO PE et al., Postural performance in decerebrated rabbit, Behav Brain Res., 2008 Jun 26, 190(1), p.124-134 | |||
| Актометр | 1981 |
|
SU976955A1 |
| БОГАЧЕВА И.Н | |||
| Нейрональные механизмы формирования локомоторного паттерна при электрической стимуляции спинного мозга, Автореф | |||
| дисс | |||
| - СПб., 2006, с.1-24 | |||
| GERASIMENKO YP et al., Formation of locomotor patterns | |||

