Изобретение может быть использовано для измерения величины угловой скорости подвижного объекта с помощью гироскопического эффекта.
Из работы [Распопов В.Я. Микромеханические приборы: Учебное пособие. 2-е изд., перераб. и доп. Тул. гос. университет. Московский гос. технологический ун-т им.К.Э.Циолковского. - Тула: Гриф и К, 2004. - 476 с., ил.] известен микрогироскоп с использованием двух инерционных масс (ИМ), крепящихся к основанию с помощью упругих подвесов, обеспечивающих им необходимые степени свободы. Для возбуждения колебаний ИМ и съема сигнала используются гребенчатые структуры.
Недостатком такого устройства является наличие элементов подвеса инерционных масс. Это обстоятельство ограничивает виброустойчивость и ударопрочность микромеханического гироскопа, с одной стороны, и требует использования сложных микротехнологий, с другой.
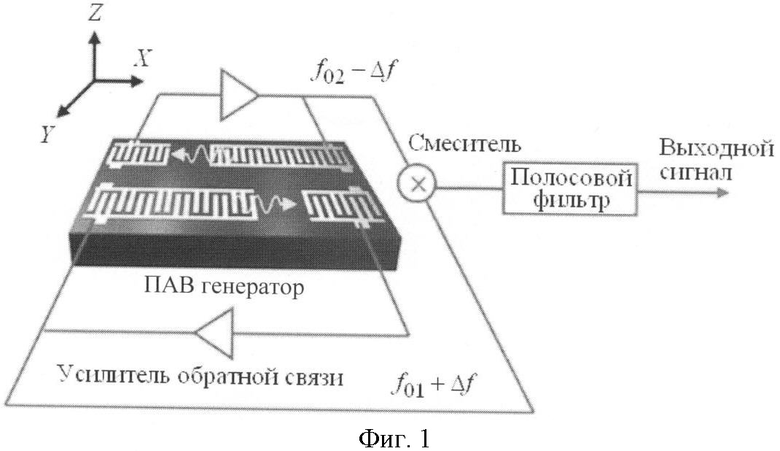
Наиболее близким по совокупности существенных признаков к данному изобретению является микрогироскоп на поверхностных акустических волнах [Sang Woo Lee, Jae Wook Rhim, Sin Wook Park and Sang Sik Yang. A micro rate gyroscope based on the SAW gyroscopic effect. J. Micromech. Microeng. 17 (2007) 2272-2279], содержащий два автогенератора, каждый из которых состоит из усилителя, охваченного цепью положительной обратной связи через линию задержки (ЛЗ) на поверхностных акустических волнах, состоящую из двух встречно-штыревых преобразователей (ВШП), нанесенных на поверхность пьезоэлектрической подложки (фиг.1). Встречное включение усилителей позволяет получить в линиях задержки пару встречно бегущих ПАВ.
При отсутствии угловой скорости вокруг оси Y (Ω=0) автогенераторы работают на собственных частотах f01 и f02 (фиг.1), разнос которых определяется неизбежными погрешностями изготовления ЛЗ. Если основание вращается (Ω≠0), то фазовые скорости ПАВ в линиях задержки приобретают противоположные по знаку приращения ±ΔV, которые, в свою очередь, вызывают смещение собственных частот генераторов на величину ±Δf. Гармонические колебания двух генераторов на частотах f1=f01+Δf и f2=f02-Δf поступают на смеситель, где выделяется сигнал на разностной f1-f2=f01-f02+2Δf и суммарной f1+f2=f01+f02 частотах.
Установленный на выходе смесителя полосовой фильтр подавляет суммарный сигнал (который при необходимости может быть использован для температурной стабилизации) и на выход микрогироскопа поступает сигнал разностной частоты, пропорциональный угловой скорости Ω.
Недостатком этого устройства является недостаточное уменьшение влияния дестабилизирующих факторов выходного сигнала микрогироскопа и, как следствие, зависимость информативного сигнала разностной частоты от температуры. Она тем существенней, чем больше начальный разнос Δf0 собственных частот двух ЛЗ f1 и f2. Среди причин, вызывающих начальные изменения разностной частоты, следует выделить, прежде всего, температурные эффекты, которые определяются разогревом линий задержки на ПАВ и собственным температурным дрейфом элементов схемы.
Задачей, решаемой изобретением, является разработка микрогироскопа на ПАВ, в котором уменьшена температурная зависимость выходного сигнала. Для решения поставленной задачи предлагаемый микрогироскоп, так же как и известный, содержит два автогенератора, каждый из которых состоит из усилителя, охваченного цепью положительной обратной связи через линию задержки на поверхностных акустических волнах, состоящую из двух встречно-штыревых преобразователей, нанесенных на поверхность пьезоэлектрической подложки. Но в отличие от известного, в предлагаемом устройстве оба автогенератора имеют общую линию задержки, а оба усилителя включены последовательно, при этом вход первого усилителя и выход второго усилителя подключены к первому встречно-штыревому преобразователю линии задержки, а выход первого усилителя и вход второго усилителя подключены ко второму встречно-штыревому преобразователю линии задержки, при этом каждый из автогенераторов подключен к импульсному коммутатору, а выходы автогенераторов подключены ко входам реверсивного счетчика, выход которого подключен ко входу регистратора.
Достигаемый технический результат - увеличение точности микрогироскопа за счет уменьшения зависимости выходного сигнала от температуры. Это происходит за счет использования каждым из двух автогенераторов общей линии задержки, что обеспечивает равенство их частот, и поочередного включения автогенераторов на входы введенного реверсивного счетчика с помощью введенного коммутатора. В этом случае исключается влияние разностной частоты автогенераторов на выходной сигнал, как это было в известном устройстве, которая имеет существенную зависимость от температурных воздействий.
Изобретение поясняется чертежами, где:
на фиг.1 - устройство, реализующее микрогироскоп-прототип;
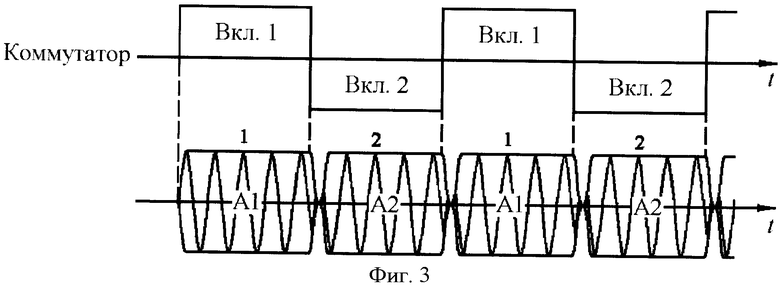
на фиг.2 - схема предлагаемого микрогироскопа;
на фиг.3 - временная диаграмма работы коммутатора и автогенераторов.
Предлагаемый микрогироскоп состоит из двух ВШП 1 и 2, расположенных на пьезоэлектрической подложке 3, двух усилителей 4 и 5, коммутатора 6, реверсивного счетчика 7 и регистратора 8.
При воздействии угловой скорости вокруг оси у фазовые скорости ПАВ в линии задержки, распространяющиеся в противоположных направлениях (фиг.2), приобретают противоположные по знаку приращения ±ΔV, которые, в свою очередь, вызывают смещение собственных частот автогенераторов на величину ±Δf.
В начальный момент времени коммутатор 6 включает первый автогенератор (фиг.3), состоящий из усилителя 4 и линии задержки (ЛЗ), которая состоит из двух ВШП 1 и 2, расположенных на пьезоэлектрической подложке 3 (фиг.2), после чего колебания автогенератора поступают на первый вход реверсивного счетчика 7, где фиксируется количество импульсов за первый полупериод измерений. Затем коммутатор 6 отключает первый автогенератор и одновременно включает второй автогенератор (фиг.3), состоящий из ЛЗ, входящей в состав первого автогенератора, и усилителя 4 (фиг.2). Выходной сигнал второго автогенератора поступает на второй вход реверсивного счетчика 7, где фиксируется количество импульсов за второй полупериод измерений. На выходе реверсивного счетчика 7 формируется разность числа накопленных импульсов за каждый полупериод измерений, которая пропорциональна измеряемой угловой скорости и фиксируется регистратором 8.
При отсутствии угловой скорости частоты двух автогенераторов, образованных двумя усилителями 4 и 5 и общей ЛЗ, являющейся частотозадающим элементом двух автогенераторов и состоящей из двух ВШП 1 и 2, расположенных на пьезоэлектрической подложке 3, равны (f1=f2=f0), а выходной сигнал микрогироскопа равен нулю. При наличии угловой скорости, частоты двух автогенераторов приобретают дифференциальные сдвиги Δf, равные по величине и противоположные по знаку:
f1=f0+Δf, f2=f0-Δf.
В результате этого на выходе реверсивного счетчика 7 формируется сигнал разностной частоты f1-f2=2Δf, пропорциональный измеряемому параметру.
Отсутствие в сигнале разностной частоты начального разноса частот двух автогенераторов приводит к значительному повышению линейности выходной характеристики и практически нулевой температурной чувствительности предлагаемого микрогироскопа.
Техническим результатом является уменьшение зависимости выходного сигнала предлагаемого микрогироскопа от температуры, повышение точности и линейности его выходной характеристики путем настройки автогенераторов с помощью варикапа на одинаковые частоты и поочередного их включения на вход введенного вычитающего устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДАВЛЕНИЯ | 1992 |
|
RU2036446C1 |
| АКСЕЛЕРОМЕТР | 1992 |
|
RU2018132C1 |
| АКСЕЛЕРОМЕТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 1992 |
|
RU2018131C1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825144A1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825145A1 |
| СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА ТЕМПЕРАТУРЫ НА ОСНОВЕ ПАССИВНЫХ ЛИНИЙ ЗАДЕРЖКИ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ С ФУНКЦИЕЙ АНТИКОЛЛИЗИИ | 2018 |
|
RU2756413C1 |
| Датчик давления | 1988 |
|
SU1645863A1 |
| СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2010 |
|
RU2422848C1 |
| Датчик давления | 1988 |
|
SU1525508A2 |
| ГИДРОФОН НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2008 |
|
RU2368099C1 |
Изобретение может быть использовано для измерения величины угловой скорости подвижного объекта с помощью гироскопического эффекта. Микрогироскоп содержит два автогенератора, каждый из которых состоит из усилителей 4 и 5, соответственно, охваченных цепью положительной обратной связи через общую линию задержки на поверхностных акустических волнах, состоящую из двух встречно-штыревых преобразователей (ВШП) 1 и 2, нанесенных на поверхность пьезоэлектрической подложки 3. Оба усилителя 4 и 5 включены последовательно, при этом вход усилителя 4 и выход усилителя 5 подключены к ВШП 1 линии задержки, а выход усилителя 4 и вход усилителя 5 подключены к ВШП 2 линии задержки. Каждый из автогенераторов подключен к импульсному коммутатору 6, а выходы автогенераторов подключены к входам реверсивного счетчика 7, выход которого подключен ко входу регистратора 8. Изобретение позволяет увеличить точность микрогироскопа за счет уменьшения зависимости выходного сигнала от температуры. 3 ил.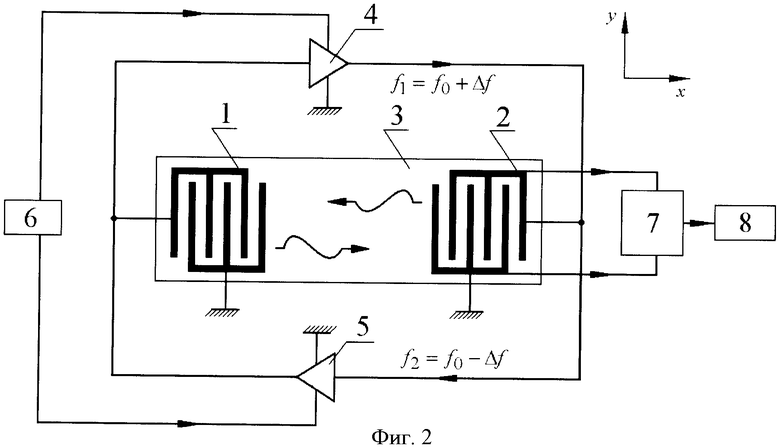
Микрогироскоп на поверхностных акустических волнах, содержащий два автогенератора, каждый из которых включает усилитель, а также линию задержки на поверхностных акустических волнах, состоящую из двух встречно-штыревых преобразователей, нанесенных на поверхность пьезоэлектрической подложки, отличающийся тем, что усилители включены последовательно, при этом вход первого усилителя и выход второго усилителя подключены к первому встречно-штыревому преобразователю линии задержки, а выход первого усилителя и вход второго усилителя подключены ко второму встречно-штыревому преобразователю линии задержки, при этом каждый из автогенераторов подключен к импульсному коммутатору, а выходы автогенераторов подключены ко входам реверсивного счетчика, выход которого подключен ко входу регистратора.
| SANG WOO LEE et al | |||
| A micro rate gyroscope based on the SAW gyroscopic effect | |||
| J | |||
| Micromech | |||
| Microeng., 17, 2007, p.2272-2279 | |||
| ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2006 |
|
RU2310165C1 |
| RU 2071033 C1, 27.12.1996 | |||
| JP 9264745 A, 07.10.1997 | |||
| JP 62148812 A, 02.07.1987. | |||

